
n a p ę d y i s t e r o w a n i e
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
24
P
rzekształtniki energoelektronicz-
ne średniego napięcia (powyżej
1 kV) powoli stają się rzeczywistością
w aplikacjach krajowej gospodarki.
Wysoka cena jednostkowa tych urzą-
dzeń, brak krajowego serwisu dla nie-
których typów, niewielkie doświad-
czenie biur projektowych, dodatkowo
utrudniają ich szybsze wdrażanie. Naj-
szersze zastosowanie mogą znaleźć
przekształtniki do sterowania prędko-
ścią obrotową silników indukcyjnych
dużej mocy (powyżej 1 MW) i typowe
napięcia znamionowego 6 kV.
W „elektro.info” 2002 nr 8 przedsta-
wiono ogólne właściwości przekształt-
ników energoelektronicznych śred-
niego napięcia i ich pierwsze krajowe
aplikacje. Ogólnie należy stwierdzić, że
obecna sytuacja w tej dziedzinie tech-
niki napędu elektrycznego przypomi-
na początek lat 90. ubiegłego wieku,
kiedy to pierwsze przemienniki czę-
stotliwości niskiego napięcia wchodzi-
ły do powszechnych aplikacji w gospo-
darce krajowej.
W regulowanych układach napędo-
wych dużej mocy ocena energetycz-
nych parametrów ma podstawowe
znaczenie, gdyż oprócz względów tech-
nologicznych decyduje o zastosowaniu
praktycznym. Najbardziej wymiernymi
parametrami energetycznymi układów
napędowych są wielkości:
sprawność energetyczna (stosu-
nek mocy mechanicznej wyjścio-
wej silnika do mocy elektrycznej
zasilającej układ),
cosinus kąta przesunięcia pierw-
szej harmonicznej prądu wzglę-
dem napięcia (napięcie i prąd za-
silający w przypadku przebie-
gów sinusoidalnych równoważne
współczynnikowi mocy),
współczynnik zawartości wyż-
szych harmonicznych w prądzie
zasilającym (współczynnik ten
równa się zeru przy przebiegach
sinusoidalnych).
Jako wielkości trudno wymierne
rozpatruje się także właściwości eks-
ploatacyjne układu napędowego, takie
jak: łatwość współpracy z automatyką
technologiczną procesu, w którym na-
pęd pracuje, monitorowanie, dostęp-
ność serwisu fabrycznego, wymaga-
ną objętość pomieszczeń do instala-
cji, sposób chłodzenia, ciężar, itp.
W niniejszym artykule przedsta-
wione zostały podstawowe zasady
doboru przekształtników energo-
elektronicznych średniego napięcia
do sterowania prędkością obrotową
silników indukcyjnych dużej mocy,
stosując jako kryterium ocenę para-
metrów energetycznych.
podstawowe zależności
Wspomniane powyżej wymier-
ne najważniejsze parametry energe-
tyczne regulowanego układu napędo-
wego można opisać następującymi za-
leżnościami:
sprawność energetyczna:
(1)
η =
P
P
M
WE
gdzie:
P
M
– moc mechaniczna na wale sil-
nika,
P
WE
– moc elektryczna pobierana
przez układ napędowy z sieci zasi-
lającej.
Dla przebiegów sinusoidalnych
i symetrycznej sieci:
(2)
P
U I
WE
S S
S
= 3
cos
ϕ
gdzie:
U
S
, I
S
, cosj
S
– wartość skuteczna napię-
cia przewodowego, wartość skuteczna
prądu pobieranego z sieci, współczyn-
nik mocy (cosinus kąta przesunięcia
pomiędzy prądem i napięciem).
Dla przebiegów odkształconych
moc wejściowa wynosi:
(3)
P
U I
WE
fh fh
h
h
n
=
=
∑
3
1
cos
ϕ
gdzie:
U
fh
, I
fh
– wartości fazowe napięcia
i prądu h-tej harmonicznej,
j
h
– kąt przesunięcia pomiędzy napię-
ciem i prądem h-tej harmonicznej,
h – rząd harmonicznej,
n – numer ostatniej harmonicznej, do
której przeprowadzono sumowanie.
Zależność (3) dotyczy symetrycz-
nego zasilania i symetrycznego wej-
ścia układu napędowego.
współczynnik przesunięcia pierw-
szej harmonicznej prądu wejścio-
wego I
f1
względem pierwszej har-
monicznej napięcia U
f1
:
(4)
cos
cos ( , )
ϕ
1
1
1
=
U I
f
f
Można rozpatrywać przesunię-
cia wyższych harmonicznych prądu
i napięcia tego samego rzędu tak jak
to wynika z zależności (3), ale tylko
wyrażenie (4) daje informację o mocy
biernej porównywalnej z mocą bierną
przy przebiegach sinusoidalnych.
współczynnik zawartości wyż-
szych harmonicznych w prądzie
pobieranym z sieci zasilającej:
(5)
THDI
I
I
S
fh
h
n
f
=
=
∑
2
2
1
Wartości wyrażeń (1), (4), (5) moż-
na przedstawiać w procentach, przy
czym w skrajnym przypadku wyraże-
nie (5) może osiągać wartości większe
od 100%. Przykładem może być rezo-
nans prądu dla określonej harmonicz-
nej wyższego rzędu.
Należy zaznaczyć, że o ile sprawność
energetyczna i współczynniki zawarto-
ści harmonicznych mają jednoznaczną
i powszechnie przyjętą interpretację po-
miarową, to sama definicja mocy bier-
nej przy przebiegach odkształconych
jest trudna. Istnieje kilka definicji mocy
biernej dla przebiegów odkształconych
prądów i napięć, często mających dobrą
interpretację pomiarową, ale nie tłuma-
czących wszystkich zjawisk.
Dla przebiegów okresowych od-
kształconych wartość mocy czynnej
w jednej fazie można zmierzyć bez-
pośrednio z definicji:
(6)
P
T
u t
i t dt
f
f
T
=
∗
∫
1
0
( )
( )
gdzie:
u
f
(t), i
f
(t) – chwilowe wartości napię-
cia i prądu fazowego,
T – wartość okresu przebiegów.
Przyrząd rejestrujący oba przebie-
gi najczęściej przetwarza je na po-
stać cyfrową, mnoży wartości pró-
zasady doboru przekształtników
energoelektronicznych
średniego napięcia
do sterowania prędkością obrotową silników indukcyjnych dużej mocy
dr inż. Zbigniew Szulc - Politechnika Warszawska
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
25
bek i uśrednia za okres T. Przy dosta-
tecznie dużej liczbie próbek wartości
chwilowych w okresie czasu T otrzy-
mać można wartość mocy czynnej
z dużą dokładnością. Pomiar THDI
nie nastręcza obecnie dużych trud-
ności, gdyż dostępne są analizatory
przebiegów odkształconych od pro-
stych aparatów do urządzeń reje-
strująco-obliczających różne wskaź-
niki i moce.
dotychczas stosowane
układy sterowania
Sterowanie prędkością obrotową
silnika indukcyjnego dużej mocy
i średniego napięcia (w Polsce naj-
częściej 6 kV) stosowane było do-
tychczas przy użyciu sprzęgła hydro-
kinetycznego lub w układzie kaska-
dowym. W przypadku sprzęgła hy-
drokinetycznego do mocy wyjścio-
wej 5 MW najczęściej używany jest
silnik indukcyjny klatkowy. Sterowa-
nie prędkością obrotową w układzie
kaskadowym wymaga silnika induk-
cyjnego pierścieniowego. Spotyka się
także w praktyce sterowanie prędko-
ścią obrotową silnika indukcyjnego
pierścieniowego przy użyciu rezysto-
rów wirnikowych, ale tylko w prze-
starzałych obiektach dawno niemo-
dernizowanych lub w napędach dźwi-
gowych małej mocy. Najczęściej rezy-
story wirnikowe wykorzystywane są
do rozruchu silnika pierścieniowego
stosowanego w przypadku, gdy wy-
magany jest duży moment rozrucho-
wy przy ograniczonym prądzie roz-
ruchowym.
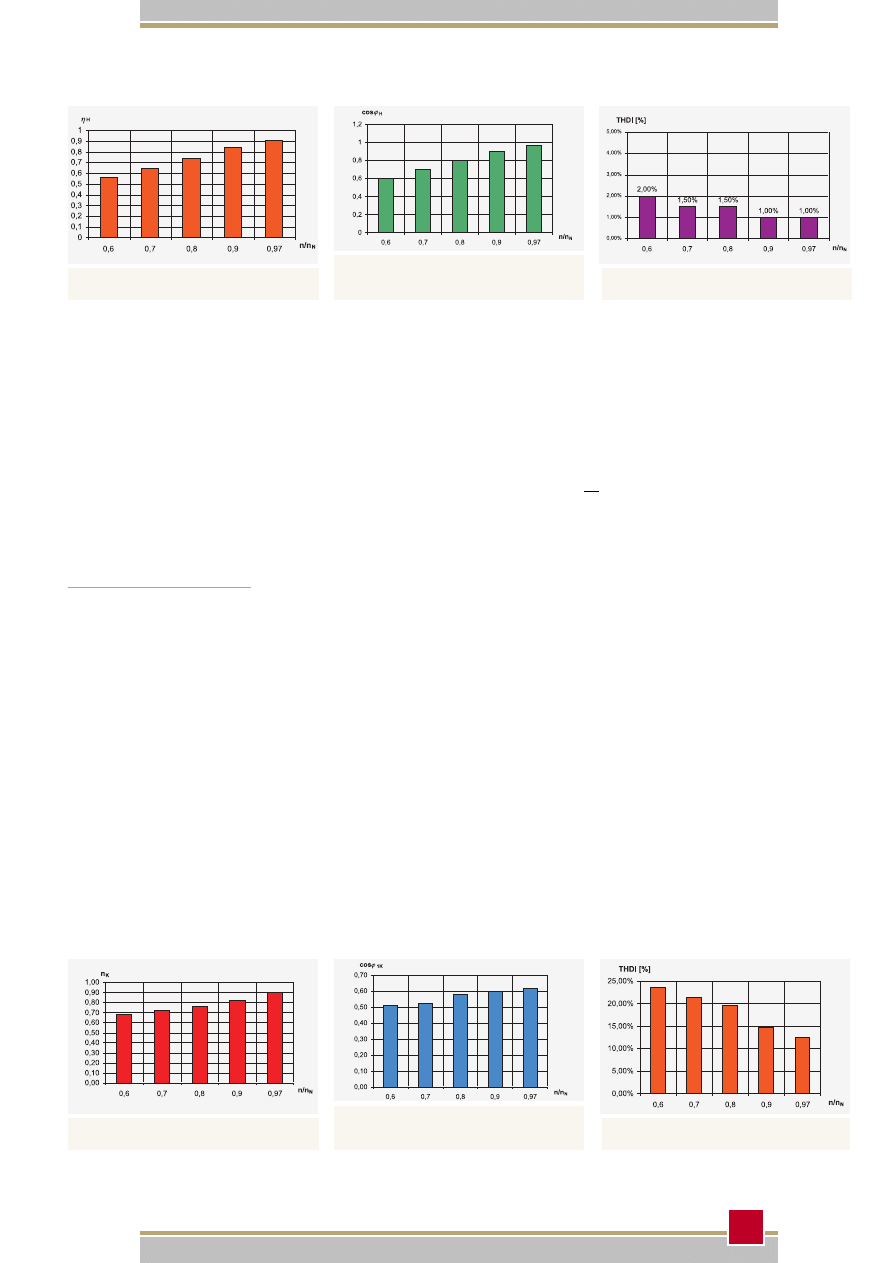
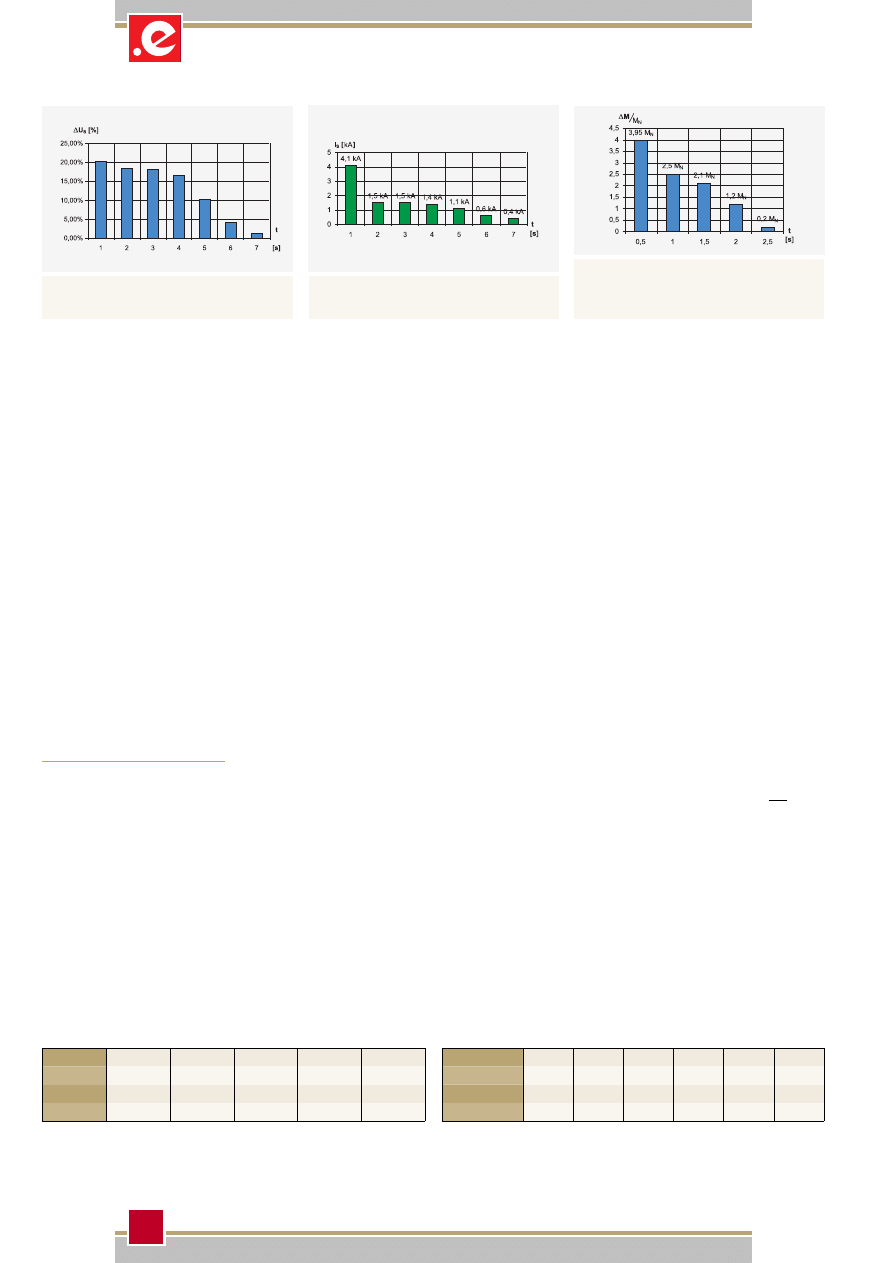
Na rysunkach 1a, 1b i 1c zosta-
ły przedstawione wyniki pomia-
rów parametrów energetycznych
układu napędowego ze sprzęgłem
hydrokinetycznym napędzającym
pompę. Podobne charakterystyki,
ale dla układu kaskadowego napę-
dzającego wentylator zostały przed-
stawione na rysunkach 2a, 2b, 2c.
Dla obydwu układów zakres regula-
cji prędkości obrotowej był podob-
ny: od 0,6 n
N
do 0,97 n
N
, przy czym
n
N
– prędkość obrotowa znamiono-
wa silnika. Moc znamionowa silni-
ka napędzającego pompę wynosiła
1250 kW, a napięcie znamionowe –
6 kV. Dla napędu wentylatora moc
znamionowa silnika pierścienio-
wego wynosiła 1000 kW, a napięcie
znamionowe też 6 kV. W układzie
kaskadowym transformator prze-
kształtnikowy miał moc znamiono-
wą 630 kVA i posiadał dwa uzwoje-
nia wtórne (układ wejściowy prze-
kształtnika tyrystorowego dla sieci
stanowił obwód 12-pulsowy) o prze-
kładni 6 kV/2 x 230 V.
Niska wartość sprawności napędu
ze sprzęgłem hydrokinetycznym wy-
nika z zależności sprawności sprzę-
gła od prędkości obrotowej wyjścio-
wej (n
H
) określonej wyrażeniem:
(7)
η
H
H
s
n
n
=
−
1
gdzie:
n
S
– prędkość obrotowa silnika, któ-
rej wartość z dobrym przybliżeniem
wynosi n
S
»n
N
Współczynnik przesunięcia prądu
względem napięcia zasilającego silnik
osiąga niskie wartości przy prędko-
ściach n/n
N
< 0,7. Przyczyną jest fakt,
że moc na wale pompy zmienia się
w przybliżeniu z trzecią potęgą war-
tości prędkości obrotowych. Współ-
czynnik zawartości harmonicznych
prądu zasilającego napęd ze sprzę-
głem hydrokinetycznym osiąga war-
tości nieprzekraczające 2%. Teore-
tycznie wartość ta powinna wyno-
sić 0%. W rzeczywistości prąd zasila-
jący był odkształcony prawdopodob-
nie ze względu na odkształcony cha-
rakter napięcia zasilającego lub nieli-
niowości w obwodzie elektrycznym
i magnetycznym silnika.
Do napędu kaskadowego napędza-
jącego wentylator o mocy ok. 20 %
mniejszej od pompy napędzanej za
pomocą sprzęgła hydrokinetycznego
wartości sprawności są większe dla
prędkości poniżej 0,9 n
N
.
Współczynniki przesunięcia prą-
du względem napięcia obu napędów
są porównywalne dla niskich pręd-
kości (n < 0,7 n
N
), a dla dużych pręd-
kości większe wartości osiąga napęd
ze sprzęgłem hydrokinetycznym. Wy-
nika to z faktu, że przekształtnik ty-
rystorowy układu kaskadowego jest
sterowany fazowo. Również takie
sterowanie przekształtnika tyrysto-
rowego jest przyczyną dużych war-
tości współczynnika THDI układu
kaskadowego (powyżej 12%).
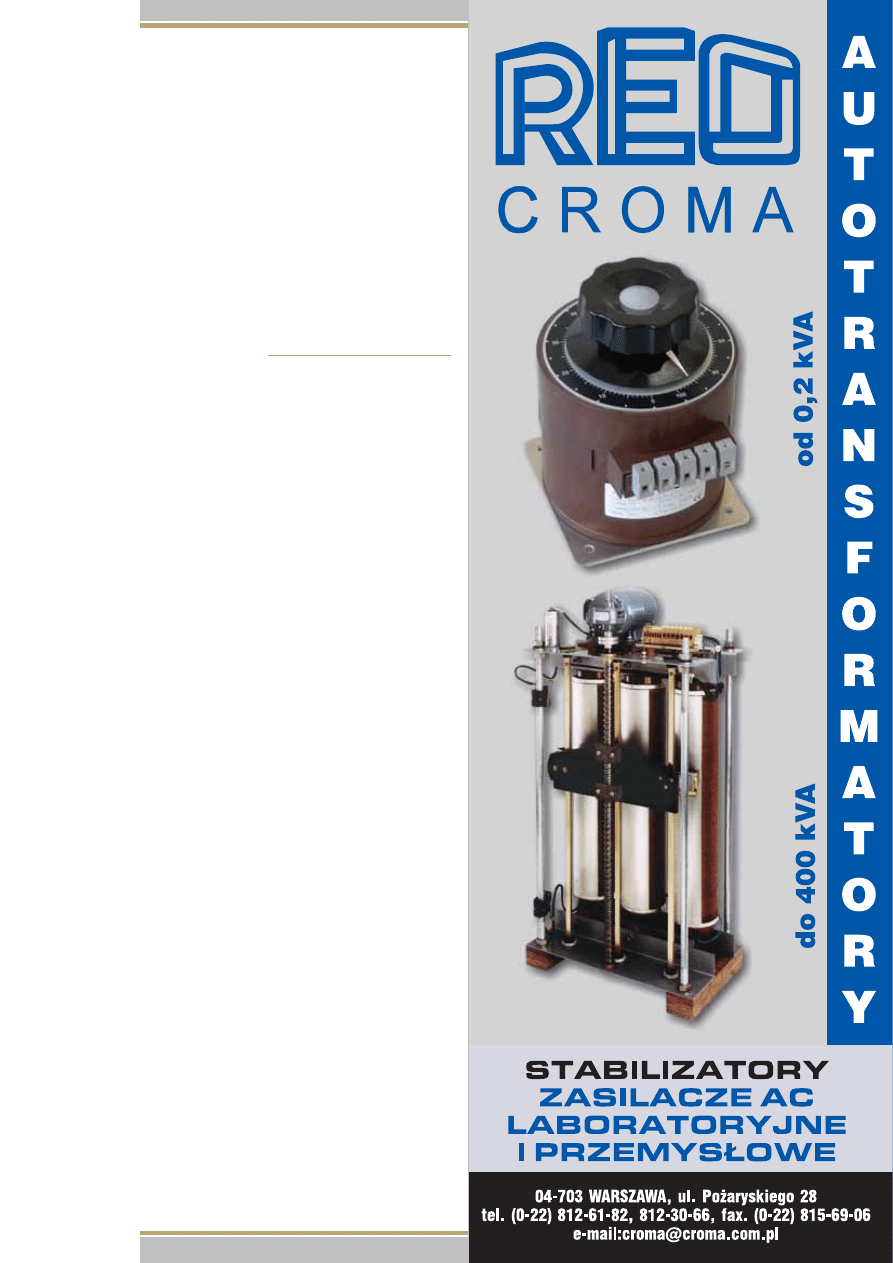
Oprócz sterowania prędkością ob-
rotową silników indukcyjnych dużej
mocy i średniego napięcia, pojawia
się często problem samego rozruchu.
Oprócz spadku napięcia podczas roz-
ruchu dużego silnika problemem jest
duży co do wartości moment przej-
ściowy o charakterze oscylacyjnym.
Najprostszym sposobem rozruchu
i najczęściej stosowanym jest bez-
pośrednie załączenie silnika do sieci
zasilającej. Na rysunkach 3a i 3b zo-
stały przedstawione przebiegi spad-
ku napięcia w sieci oraz prąd silni-
Rys. 1a Sprawność układu napędowego ze sprzęgłem
hydrokinetycznym
Rys. 1b Współczynnik przesunięcia prądu względem napię-
cia zasilających układ napędowy ze sprzęgłem hy-
drokinetycznym
Rys. 1c Współczynnik THDI prądu zasilającego układ
napędowy ze sprzęgłem hydrokinetycznym
Rys. 2a Sprawność układu kaskadowego napędzające-
go wentylator
Rys. 2b Współczynnik przesunięcia pierwszej harmonicz-
nej prądu względem napięcia w układzie kaska-
dowym napędzającym wentylator
Rys. 2c Współczynnik THDI prądu zasilającego kaska-
dowy układ napędowy wentylatora
n a p ę d y i s t e r o w a n i e
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
26
ka (wartość maksymalna chwilo-
wa) w funkcji czasu dla silnika klat-
kowego o mocy 3,7 MW, 6 kV, napę-
dzającego młyn ścierający. Przebie-
gi te zostały wykonane na podsta-
wie pomiarów. Na rysunku 3c został
przedstawiony przebieg momentu
przejściowego (maksymalnych war-
tości) wartości w funkcji czasu wy-
konany na podstawie obliczeń kom-
puterowych.
Elementy półprzewodnikowe śred-
niego napięcia pozwalają wykonać
SOFT-START dla takiego silnika w po-
staci tyrystorowego regulatora napię-
cia umożliwiającego złagodzenia ujem-
nych skutków rozruchu dużego silni-
ka indukcyjnego klatkowego.
przykładowy dobór
przekształtników
średniego napięcia
Przykładowy dobór przekształtni-
ków zostanie przeprowadzony dla re-
gulowanego napędu pompy wody za-
silającej blok energetyczny w elektro-
ciepłowni oraz dla silnika napędzają-
cego wspomniany wyżej młyn ściera-
jący w celu poprawy ujemnych skut-
ków bezpośredniego rozruchu. Jako
wielkości wyjściowe do przeprowa-
dzenia tego doboru należy zastoso-
wać następujące parametry:
parametry silnika i jego obciąże-
nie na wale w zakresie regulowa-
nej prędkości obrotowej,
wymagany zakres regulowanej
prędkości obrotowej,
parametry zasilania układu na-
pędowego (wartość napięcia, do-
puszczalny spadek napięcia, moc
zwarciowa w punkcie przyłącze-
nia – S
Z
),
wymagane szybkości zmian pręd-
kości obrotowej,
moment bezwładności maszyny
roboczej na wale silnika.
Wielkości te charakteryzują się
konkretnymi wartościami lub zbio-
rem wartości występujących pod-
czas eksploatacji. Na tej podstawie
można obliczyć wymagane warto-
ści parametrów przyjęte jako kryte-
rium doboru.
W pierwszym przykładzie do pom-
py zasilającej typu Z (producent WaFa
Pomp) serii 15Z33 dobrano silnik klat-
kowy o mocy 1600 kW, 6 kV i pręd-
kości synchronicznej 3000 obr. / min.
Przewidywany zakres regulacji pręd-
kości obrotowej ma wynosić od
0,65 n
N
do n
N
, gdyż wtedy będą za-
chowane wymagane wartości para-
metrów technologicznych pompy.
Moc na wale silnika będzie się zmie-
niać od wartości ok. 0,23 P
N
do P
N
.
Jako pierwszy parametr energe-
tyczny rozpatrzono sprawność zasto-
sowanego układu napędowego. Stoso-
wane często w elektrowniach i elek-
trociepłowniach układy napędowe
ze sprzęgłem hydrokinetycznym zo-
stały odrzucone ze względu na małą
sprawność w dolnym zakresie pręd-
kości (dla 0,65 n
N
sprawność wyno-
siłaby dla układu napędowego 0,58)
oraz nie byłoby możliwe osiągnięcie
prędkości znamionowej (sprzęgło
hydrokinetyczne musi posiadać mi-
nimalny poślizg rzędu 2,5 % wynikają-
cy z jego zasady działania). Układ na-
pędowy z silnikiem pierścieniowym
(kaskadowy układ napędowy) został
wykluczony z rozważań ze względu
na właściwości eksploatacyjne silnika
(szczotki, pierścienie ślizgowe, częste
remonty) i dużą wartość współczyn-
nika THDI (nie mniejszy niż 15 %).
Do rozważań wzięto pod uwagę
przemienniki częstotliwości śred-
niego napięcia (PSN) gdyż należa-
ło rozpatrzyć możliwość dalszego
użytkowania kilkunastoletniego sil-
nika z typową izolacją bez izolowa-
nych łożysk. Z tych względów możli-
we było zastosowanie PSN tylko o si-
nusoidalnym regulowanym napięciu
wyjściowym.
Układ napędowy ma być zasila-
ny z sieci o mocy zwarciowej 120
MVA i
nie przewiduje się kompen-
sacji mocy biernej i filtrów wyższych
harmonicznych. W związku z powyż-
szymi założeniami wybrano PSN o
wielopulsowej strukturze obwodu
wejściowego (36-pulsowy) i wielo-
poziomowym (kilkunastopoziomo-
wym) kształtowaniu napięcia o ma-
łej zawartości wyższych harmonicz-
nych (ok. 5%). Na podstawie para-
metrów dostarczanych przez produ-
centa tego urządzenia można było
przeprowadzić obliczenia kompu-
terowe.
Proponowany układ napędo-
wy z wybranym PSN nie umożli-
wia hamowania elektrycznego i
należało rozwiązać równanie opi-
sujące stan dynamiczny przejścia
z jednej wartości zadanej na dru-
gą. Przejście dotyczyło zadawania
mniejszej prędkości (niż aktual-
na), gdyż układ napędowy wtedy
tylko hamuje wybiegiem (momen-
tem oporowym pompy). Za pomocą
obliczeń komputerowych i stosując
założenia upraszczające (linearyza-
cja momentu obciążenia) rozwiązy-
wano równanie:
(8)
M
M
J
d
dt
s
P
c
−
=
Ω
gdzie:
M
S
– moment silnika sterowane-
go z PSN,
M
P
– moment oporowy pompy,
J
C
– moment bezwładności całkowity
na wale silnika.
Obliczony czas przejścia był mniej-
szy od 2 s, co zupełnie wystarczyło
ze względu na procesy technologicz-
ne obiektu.
n/n
N
0,65
0,7
0,8
0,9
1,0
h [%]
87,5
89,5
91,1
91,5
92,0
THDI [%]
6,32
5,95
5,16
5,05
4,85
cosj
1
[-]
0,91
0,92
0,92
0,94
0,95
Tab. 1 Wartości parametrów energetycznych regulowanego układu napędowego pom-
py wody zasilającej
t [s]
1
3
5
10
15
20
THDI [%]
11,9
11,1
11,0
11,0
11,0
2,5
DM/M
N
[-]
0,25
0,37
0,51
0,25
0,12
0,05
DU [%]
6,5
6,5
6,5
6,5
6,5
1,5
Tab. 2 Parametry energetyczne podczas rozruchu silnika 3,7 MW, 6 kV z zastosowaniem
tyrystorowej regulacji napięcia typu SOFT-START
Rys. 3a Przebieg spadku napięcia w sieci 6 kV zasilają-
cej silnik o mocy 3,7 MW podczas jego bezpo-
średniego rozruchu
Rys. 3b Przebieg maksymalnych wartości prądu silnika
o mocy 3,7 MW podczas jego bezpośredniego
rozruchu. Prąd znamionowy silnika I
N
= 417 A
Rys. 3c Przebieg oscylacyjny momentu rozruchowego
(wartość maksymalna odniesiona do znamiono-
wej wartości momentu silnika 3,7 MW podczas
jego bezpośredniego rozruchu)
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
27
W celu obliczenia sprawności ener-
getycznej napędu regulowanego pom-
py oraz współczynnika przesunięcia
pierwszej harmonicznej prądu wzglę-
dem napięcia (prąd i napięcie zasila-
jące) i współczynnika wyższych har-
monicznych w prądzie zasilającym
zidentyfikowano wartości parame-
trów opisujących silnik napędowy,
PSN oraz sieć zasilającą. Wyniki obli-
czeń w funkcji wymaganego zakresu
regulacji prędkości obrotowej zosta-
ły przedstawione w tabeli 1.
Na podstawie wyników obliczeń
zawartych w tabeli 1 można stwier-
dzić, że dobrany PSN spełnił wymaga-
ne założenia i układ napędowy pom-
py zasilającej, sterując prędkością
obrotową, posiada wysoką wartość
sprawności energetycznej (h > 87 %),
w niewielki sposób oddziałuje na sieć
zasilającą (THDI < 6,3 %) oraz nie wy-
maga dodatkowej kompensacji mocy
biernej (cosj
1
> 0,91). Drugi przykład
dotyczy doboru urządzenia tyrystoro-
wego typu SOFT-START. Jako rozpa-
trywany napęd wzięto wspomniany
już układ z silnikiem 3,7 MW, 6 kV.
W obliczeniach wykorzystano dokład-
ne dane silnika i maszyny roboczej,
gdyż autor dysponował wynikami ba-
dań rozruchu tego silnika. Na tej pod-
stawie i znajomości parametrów sieci
zasilającej określono możliwy do osią-
gnięcia prąd rozruchowy ograniczany
przez SOFT-START. Wartość tego prą-
du wynosi 2 I
N
(dwie wartości prądu
znamionowego silnika).
Na tej podstawie obliczono przebie-
gi zmian współczynnika THDI prądu
pobieranego z sieci podczas rozruchu,
wartości maksymalne (DM) momen-
tów oscylacyjnych oraz spadek napię-
cia w rozdzielni głównej (DU), z której
był zasilany silnik. Wyniki tych obli-
czeń zestawiono w tabeli 2 w funkcji
czasu rozruchu. Czas rozruchu uległ
wydłużeniu, gdyż jest to wynikiem
ograniczenia nie tylko prądu, ale też
i momentu silnika.
Duża wartość THDI wynika z zasa-
dy działania SOFT-STARTU i dla ma-
łych silników rzędu kilkudziesięciu
kW jest znacznie większa. Silniki du-
żej mocy posiadają większą wartość
stosunku X
s
/(R
S
+ R
R
) – reaktancja
rozproszenia do rezystancji stojana
i wirnika – co powoduje wygładza-
nie prądu rozruchowego. Wydłuże-
nie czasu rozruchu w tym przypad-
ku jest dopuszczalne przez względy
technologiczne. Zastosowanie SOFT-
STARTU ograniczyło znacznie pulsu-
jący moment rozruchowy oraz, co naj-
ważniejsze, kilkakrotnie ograniczyło
spadek napięcia w sieci zasilającej.
podsumowanie
Przedstawione powyżej zasady
doboru przekształtników energo-
elektronicznych zostały przedsta-
wione skrótowo ze względu na ob-
szerny zakres zagadnienia. Ograni-
czono się do dwóch przykładów naj-
częściej występujących w praktyce.
Na podstawie tych rozważań moż-
na stwierdzić:
zastosowanie przekształtników
energoelektronicznych do silni-
ków indukcyjnych dużej mocy
i średniego napięcia stwarza
nowe duże możliwości eksploata-
cyjne,
parametry energetyczne takich
regulowanych układów napędo-
wych pozwalają uzasadnić eko-
nomiczne korzyści ich stosowa-
nia (oszczędność energii, ograni-
czanie mocy biernej, małe oddzia-
ływanie na sieć zasilającą),
zastosowanie przekształtników
energoelektronicznych do silni-
ków dużej mocy i średniego na-
pięcia wymaga dobrej znajomo-
ści teoretycznej i praktycznej tych
urządzeń oraz obliczeń kompute-
rowych zjawisk związanych z ich
eksploatacją,
w krajowym przemyśle pracu-
je kilka takich układów napędo-
wych spełniając wymagania sta-
wiane na etapie projektowania.
Przykłady opisane w niniejszym
artykule są bardzo zbliżone co do
wartości parametrów występujących
w układach, które są już uruchomio-
ne i obecnie badane przez autora.
Wstępne wyniki pomiarów pokry-
wają się z wynikami obliczeń.
Wyszukiwarka
Podobne podstrony:
ei 2004 07 08 s016
ei 2004 07 08 s039
ei 2004 07 08 s040
ei 2004 07 08 s058
ei 2004 07 08 s030
ei 2004 07 08 s005
ei 2004 07 08 s065
ei 2004 07 08 s019
ei 2004 07 08 s052
ei 2004 07 08 s061
ei 2004 07 08 s034
ei 2004 07 08 s047
ei 2004 07 08 s056
ei 2004 07 08 s078
ei 2004 07 08 s043
ei 2004 07 08 s072
ei 2004 07 08 s003
ei 2004 07 08 s004
ei 2004 07 08 s068
więcej podobnych podstron