Elektuur
11/98
Es ist schon fast zehn
Jahre her, da in Elek-
tor ein Bauvorschlag
für ein Barometer/
einen Höhenmesser
zu finden war. Inzwi-
schen bietet die Elek-
tronik Möglich-
keiten, an die
vor einem
Jahrzehnt
kaum zu den-
ken war. Ein
Präzisions-
Luftdrucksen-
sor mit inte-
grierter Signal-
aufbereitung
liefert das Meßsig-
nal, Auswertung,
Speicherung, Anzeige
und den Datenaus-
tausch mit dem PC
übernimmt ein Mikro-
controllersystem.
18
Präzisionsbarometer/
Höhenmesser
Meßgerät mit allen Schikanen
MESSEN & TESTEN
Eigenschaften
7 Barometerfunktion
7 relative oder absolute Höhenmessung
7 Meßbereich -2000 m bis +10.000 m
7 Höhenmessung mit virtuellem NN als Referenz
7 1- oder 2-Punkt-Kalibrierung
7 EEPROM-Datenlogger für 1000 Samples
7 Logintervall zwischen 10 s und 8 h
7 Logdaten pro Sample vom PC abrufbar
Ein Blick und gar ein leichtes Klopfen
auf ein herkömmliches Barometer sagt
nicht viel darüber aus, ob gutes oder
schlechtes Wetter zu erwarten ist. Viel-
mehr ist es die barometrische Tendenz
- in welcher Geschwindigkeit, Größe
und Richtung finden Luftdruckverän-
derungen statt - die eine recht zuver-
lässige Vorhersage für eine zeitlich
begrenzte Periode von einigen Stun-
den erlaubt. Natürlich liefert ein
mechanisches Barometer in dieser Hin-
sicht ziemlich ungenaue Ergebnisse,
und das Klopfen beschränkt eher die
Lebensdauer des Geräts als daß es eine
Tendenz offenbart.
D
R U C K U N D
H
Ö H E
Wer ein Barometer zum Beispiel in
einer Wetterstation oder als “voreilen-
der” Außentemperaturregler in einer
Heizungsanlage integrieren möchte,
benötigt eine elektronische, mikrocon-
trollergesteuerte Variante, die genau
arbeitet und - wie bei dem vorliegen-
den Gerät der Fall - einiges an Features
zu bieten hat. Der maximale Gesamt-
fehler liegt knapp über (für Barometer)
geringen 2 %, Meßergebnisse können
gespeichert und auf Wunsch an einen
PC oder einen anderen Rechner wei-
tergegeben werden.
Neben dem Luftdruck kann ein Baro-
meter im Prinzip auch die Höhe anzei-
gen, da Luftdruck und Höhe in einem
Zusammenhang stehen. Zwar spielen
dabei auch andere Faktoren wie
Feuchte und Temperatur eine Rolle,
wir wollen diese aber nicht weiter
beachten, da der Schaltungsaufwand
zur Kompensation solcher Störgrößen
den Rahmen des Selbstbaus sprengen
würde.
Um ein Barometer in eine Höhenmes-
ser zu verwandeln, bedarf es lediglich
einer anderen Skalierung. Nun ist aber
der Zusammenhang alles andere als
linear, sondern folgt der Beziehung
mit
P:
aktueller Druck
P
NN
:
Druck auf Meereshöhe
H:
Höhe
Man unterscheidet zwischen einer
relativen und einer absoluten Höhen-
messung. Der Unterschied liegt auf der
Hand: Bei der Relativmessung wird eine
bestimmte Höhe zum Nullpunkt
ernannt. Die gemessene Höhe bezieht
sich immer auf diesen Nullpunkt.
mit
P:
aktueller Druck
H
H
P
P
H
P
P
r
NN
N
NN
=
−
H
P
P
P
P
NN
NN
=
−
⋅
−
1
22, 555 10
1
5,2563
6
P
NN
:
Druck auf Meereshöhe
P
N
Eingestellter Referenzdruck
H:
Höhe
Relative Höhenmessungen sind nur
dann sinnvoll, wenn der Luftdruck auf
der Referenzhöhe nahezu konstant
bleibt.
Bei der absoluten Höhenmessung gilt als
Referenz immer Normalnull, der
Meeresspiegel. Dazu fließt der Refe-
renzdruck auf Meereshöhe P
NN
in die
Berechnung ein.
mit
P:
aktueller Druck
P
NN
:
Druck auf Meereshöhe
H:
Höhe
Da die absolut gemessene Höhe allein
vom Luftdruck auf Meeresspiegel
abhängig ist, sollte man bei langan-
dauernden Messungen P
NN
regel-
mäßig an den wirklichen Luftdruck
auf Meereshöhe anpassen.
D
E R
S
E N S O R
Um den Luftdruck zu ermitteln, wird
ein Barometric Absolute Pressure Sensor
H
H
P
P
a
NN
=
19
Elektuur
11/98
1
4
S+
S-
2
3
ACTIVE
ELEMENT
PIN
*
1. GROUND
980097 - 14
2. +V
OUT
3. V
S
4. -V
OUT
EDGED
DIAPHRAGM
BOUNDARY
TRANSVERSE
VOLTAGE STRAIN
GAUGE RESISTOR
VOLTAGE
TAPS
1
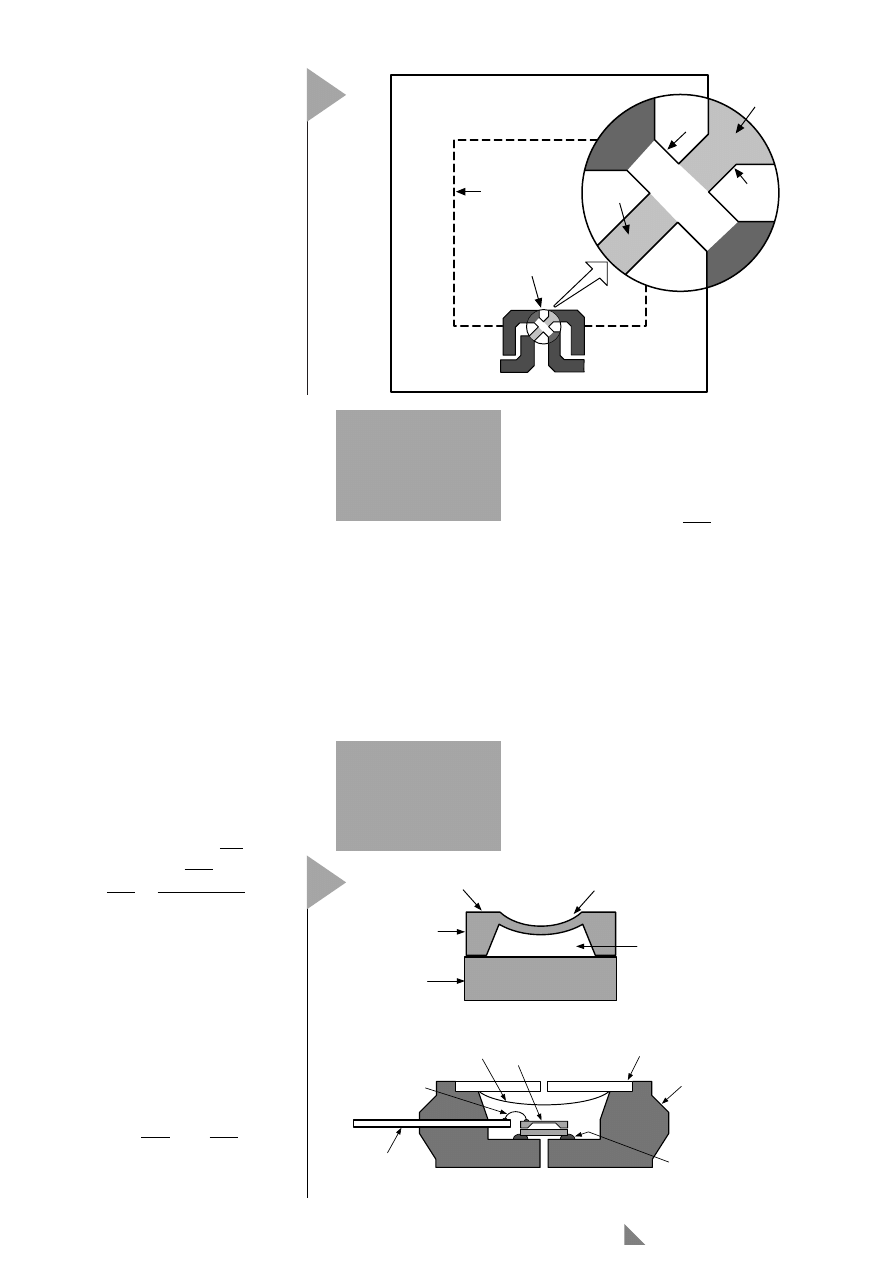
Bild 1. Ein Dia-
phragma mit einem
piezoresistiven Ele-
ment stellt die
Grundlage des
Drucksensors dar.
Bild 2. Der Drucksen-
sor für absolute Mes-
sungen ist auf der
Rückseite des Dia-
phragmas geschlos-
sen.
Sealed Vacuum
Behind Diaphragm
Diaphragm
P1 Pressure
Sensor Die
(Cross-Section)
Constraint
Wafer
980097 - 15a
SILICONE GEL
DIE COAT
ABSOLUTE
DIE
P1
STAINLESS STEEL
METAL COVER
THERMPLASTIC
EPOXY
CASE
DIE
BOND
ABSOLUTE ELEMENT
P2
WIRE BOND
LEAD FRAME
980097 - 15b
2
(BAP) mit der Bezeich-
nung MPXS4100A von
Motorola eingesetzt.
Dieser Sensor enthält
eine dünne Folie (Diaphragma), die
von einem angelegten Druck einge-
drückt wird (
Bild 1). Am Rand des Dia-
phragmas befindet sich ein piezoresi-
stives Element, das sich mit dem Dia-
phragma verformt, dehnt, und so eine
Widerstandsänderung erfährt, die pro-
portional zur Verformung und somit
zum Druck ist. Das Sensorelement ver-
hält sich also wie ein Potentiometer:
Wenn man die Versorgungsspannung
anlegt, kann man aus der Ausgangs-
spannung des Sensors Rückschlüsse
auf den Druck ziehen.
Es gibt drei Arten von Drucksensoren.
Bei differentiellen Drucksensoren wird an
beide Seiten des Diaphragmas ein
Druck angelegt, das Sensorelement lie-
fert eine der Druckdifferenz propor-
tionale Spannung. Ähnlich ist der Nor-
mal-Drucksensor aufgebaut, als Refe-
renz dient hier der Umgebungsdruck,
die Ausgangsspannung gibt den relati-
ven Luftdruck wieder. Bei dem hier
eingesetzten Absolutwert-Sensor ist die
Kammer hinter dem Diaphragma
gegenüber der Umgebung abgeschlos-
sen und mit einem Referenzdruck
gefüllt (Bild 2). Die
Ausgangsspannung
gibt den absoluten
Druck an, genau das
richtige für einen
Höhenmesser, eine
(mobile) Wetterstation
oder ein Barometer.
Dieser Sensor wurde eigentlich für
Anwendungen in Kraftfahrzeugen
entwickelt, ist aber für unsere Zwecke
durchaus gut geeignet. Sein größter
Vorteil: Er ist bei Conrad und zu einem
nicht übermäßig hohen Preis erhält-
lich.
Der Sensor liefert ein Ausgangssignal
von 0,3...4,9 V linear zum Druckbereich
von 20...105 kPa (200...1050 Millibar).
Der maximale durch den Sensor ver-
ursachte Fehler beträgt 1,8 % im Tem-
peraturbereich 0...85 °C. Der Sensor lie-
fert aber ein brauchbares Signal auch
noch bei -40 °C und bei +125 °C und
hält Überdrücken bis 400 kPa (dau-
ernd) beziehungsweise 1000 kPa
(Burst) stand.
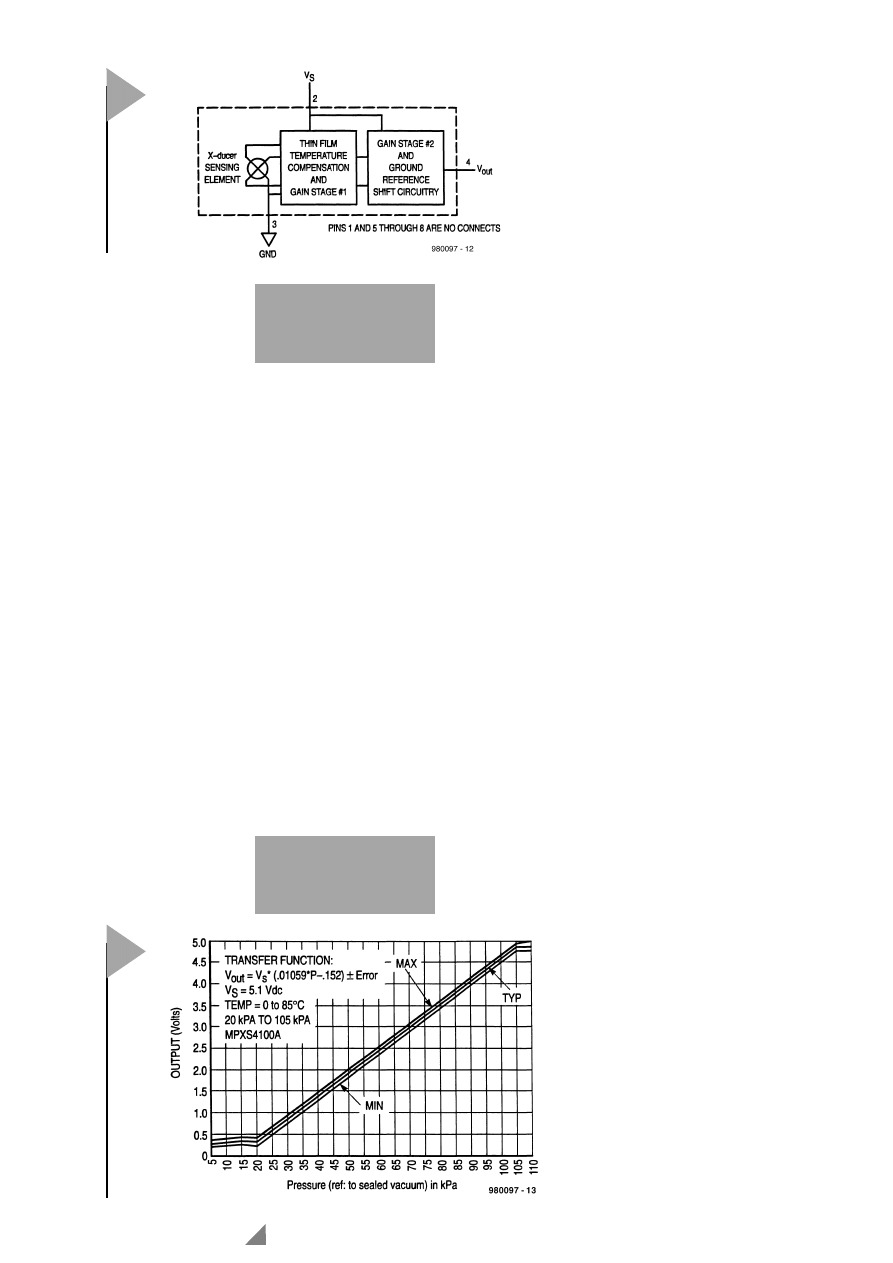
Bild 3 zeigt, daß neben dem eigentli-
chen Sensorelement noch weitere
Funktionsgruppen vorhanden sind,
nämlich eine Temperaturkompensa-
tion, zwei Verstärkerstufen und eine
Asymmetrierschaltung, die das diffe-
rentielle Meßsignal in ein massebezo-
genes verwandelt. Alle diese Funktio-
nen sorgen für das im Bereich 20...105
kPa weitgehend lineare
Ausgangssignal des
Bausteins (Empfind-
lichkeit 54 mV/kPa), wie es in Bild 4
dargestellt ist. Die Übertragungsfunk-
tion beträgt:
V
OUT
= V
S
⋅ (P⋅0,01059-0,1518) ± E
mit
V
S
:
5,1 V ± 0,25 V
P:
Druck [kPa]
E:
Gesamtfehler
Das lineare Verhalten und der Aus-
gangsspannungsbereich erlaubt den
hard- und softwaremäßig einfachen
Anschluß eines A/D-Wandlers und
eines Mikrocontrollers.
D
E R
A / D - W
A N D L E R
Um das analoge in ein digitales Signal
umzusetzen, wird ein preiswerter und
energiesparender Spezialist für nieder-
frequente Meßsignale eingesetzt, der
16-bit-Sigma-Delta-Wandler AD7715-5
von Analog Devices. Angesichts der
Spezifikationen des Sensors scheint
eine Auflösung von 16 bit zwar ein
wenig übertrieben, bei einer Messung
mit einigermaßen konstanter Umge-
bungstemperatur läßt sich aber eine
vertrauenswürdige Höhenauflösung
von 1 m erzielen.
Der AD7715 besitzt einen symmetri-
schen Eingangspuffer und einen pro-
grammierbaren Verstärker (PGA). Da
aber der Eingang AIN(-) genau wie
REF IN(-) auf Masse liegt, arbeitet der
Wandler asymmetrisch und benötigt
ein Eingangssignal von 0...2,5 V (bei
PGA-Verstärkung von 1). Dies erfordert
zwei Widerstandsteiler zwischen Sen-
sor und Wandler, die das Meßsignal
(R1/R2) und die Referenzspannung
(R3/R4) genau halbieren. Die Konden-
satoren C1 und C2 entkoppeln diese
Spannungen.
Meß- und Referenzspannung gelan-
gen zum Sigma-Delta-Modulator, der
von einem digitalen Filter abgeschlos-
sen wird. Das digitale Ausgangssignal
DOUT erscheint in serieller Form, so
daß nur wenige Verbindungen zum
Mikrocontroller gezogen werden
müssen.
Der Wandler bietet dem Controller
(neben der schon erwähnten PGA-Ver-
stärkung) mannigfaltige Möglichkei-
ten, den Betrieb zu beeinflussen. Es ste-
hen neben dem 16-bit-Datenregister
insgesamt drei 8 bit breite Register zur
Verfügung, die seriell über DIN einge-
stellt oder gelesen werden (Communi-
cation, Setup und Test). Wichtig ist hier
nur zu wissen, daß der Wandler sich
selbst kalibrieren kann und auf Befehl
des Controllers auch ab und an diesen
Vorgang durchführt.
Der Wandler wird von einem eigenen
Oszillator mit X1 im 2,4576-MHz-Rhy-
thmus getaktet. Der Auslesetakt aller-
dings wird vom Controller an
Anschluß SCLK vorgegeben.
20
Elektuur
11/98
3
Bild 3. Innenblock-
schaltung des BAP-
Sensors MPXS4100A
mit Signalaufbereitung.
4
Bild 4. Zwischen 20 kPa
und 105 kPa verläuft
die Sensor-Kennlinie
linear.
D
E R
C
O N T R O L L E R
Damit sind wir schon beim Control-
ler, einem 8051-Derivat mit der
Bezeichnung AT89S53-12 von Atmel.
Um die Schaltung möglichst kom-
pakt zu halten, haben wir uns für
diese Einchiplösung entschieden. Mit
Konsequenzen: Der Controller muß
über RAM und ROM verfügen. Diese
Speicher fallen aber mit 12 kByte
Flash-ROM und 256⋅8 bit RAM
naturgegeben recht klein aus (zudem
ist der ROM-Speicher größtenteils
mit dem Programm und mit Kon-
stanten gefüllt, das RAM dient als
Stack und für die Variablen). So kön-
nen die Berechnungen nicht in Fließ-
kommaarithmetik erfolgen, sondern
durch (recht umständliche) Umrech-
nungen. Doch davon nun genug, die
Arbeitsweise der Software soll ein
Schwerpunkt im zweiten Teil des
Artikels sein.
Port 1 ist für die Steuerung des Wand-
lers, das Lesen der Meßdaten sowie die
Kommunikation über die RS232-
Schnittstelle (MAX233) mit dem PC
zuständig. Port 0 und Port 2 steuern ein
LC-Display und fragen die Bedienein-
richtungen (die fünf Taster S2...S6) auf
einem eigenen Platinenabschnitt an.
Am Controller ist auch ein EEPROM
angeschlossen, das seriell über eine
Zweidrahtleitung gesteuert wird. Es
besitzt einen Speicherraum von 16
Kbit, bietet also bis zu 1000 Samples á
16 bit Platz.
Noch ein Wort zum Controller. Er
besitzt eine serielle Programmier-
schnittstelle und kann (dank Flash) in
der Schaltung gelöscht und program-
miert werden. Der Einsatz eines sol-
chen ISP-Controllers (in system pro-
grammable) erschien uns nicht nur aus
Kostengründen sinnvoll. ISP gibt
Ihnen die Möglichkeit, den Controller
selbst zu programmieren und Ände-
rungen an der Software vorzunehmen.
Doch auch dazu mehr im zweiten Arti-
kel im Dezemberheft.
M
E S S F E H L E R
Jedes Bauteil des Meßgerätes stellt eine
mögliche Quelle für Meßfehler dar.
Beim Sensors hat man es innerhalb des
Temperaturbereichs 0...85 °C mit einem
maximalen Druckfehler von ±1,5 kPa
zu tun. Von -40...0 °C und +85...125 °C
muß der Druckfehler mit einem Tem-
peraturfehler-Faktor (TF) von bis zu 3
multipliziert werden. Damit erhält
man einen Gesamtfehler des Sensors
von
E = ± (1,5 kPa ⋅ TF ⋅ 0,01059 ⋅ V
S
)
Dieser Fehler ist auch in Bild 4 einge-
zeichnet. Durch den Widerstandsteiler
R1/R2 wird das Meßsignal halbiert.
Durch die Toleranz der Widerstände
kann aber ein zusätzlicher Fehler von
±2 % der Meßspannung auftreten. Da
auch die Referenzspannung einen Tei-
ler durchläuft (und weitere ±2 % Feh-
ler verursachen kann), wird schnell
klar, daß man die Teilerwiderstände auf
21
Elektuur
11/98
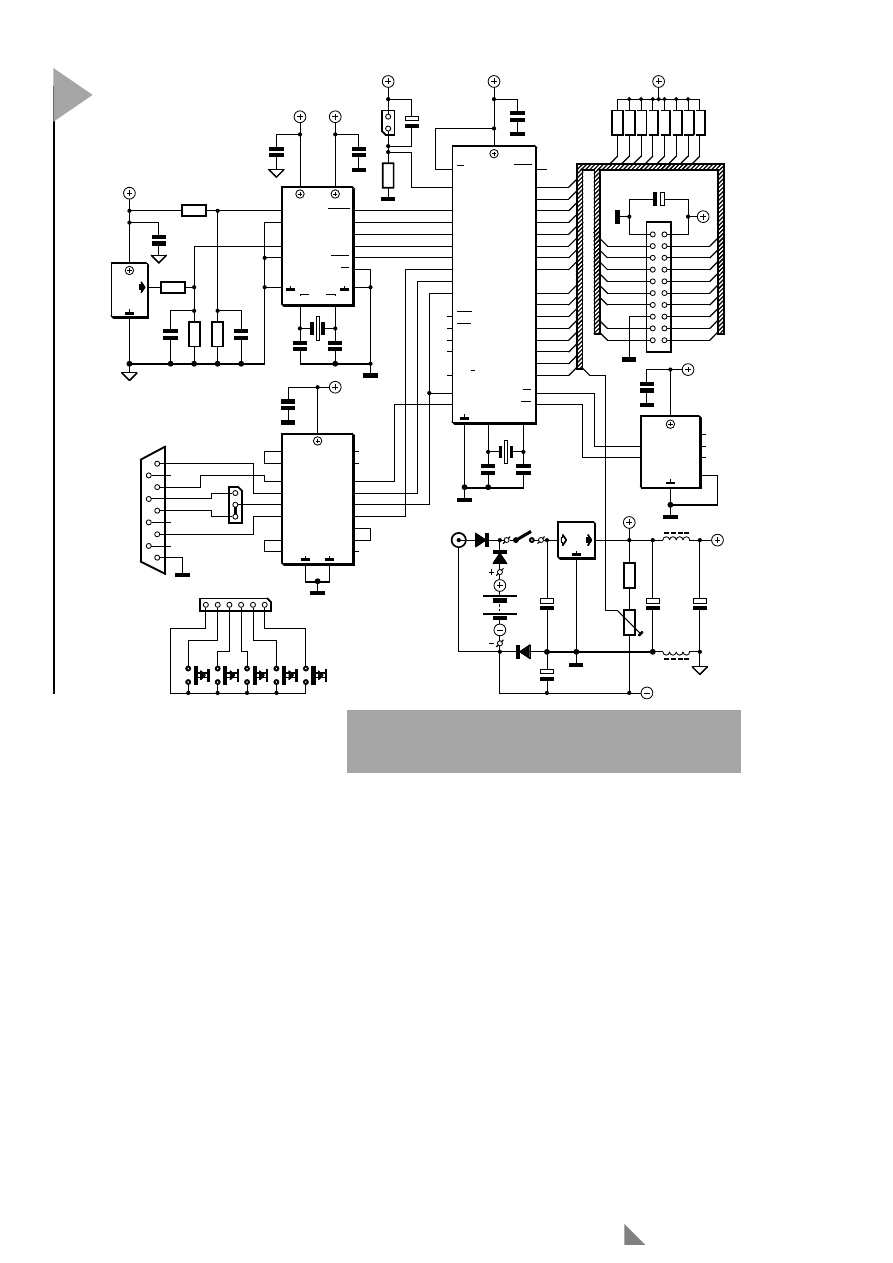
Bild 5. Die vollständige Schaltung des
Barometers/Höhenmessers mit Sensor, Wandler, Con-
troller, Speicher, RS232-Treiber und Netzteil.
X2
11.0592MHz
C6
22p
C5
22p
C13
100n
C3
22p
C4
22p
X1
2.4576MHz
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
K1
C8
10
µ
10V
D0
D1
D2
D3
D4
D5
D6
D7
8x 10k
1
2
3
4
5
6
7
8
9
R6
D0
D1
D2
D3
D4
D5
D6
D7
RS
R/W
E
SW1
SW2
SW3
SW4
SW5
R/W
D0
D2
D4
D6
RS
E
D1
D3
D5
D7
SW2
SW4
SW1
SW3
SW5
AT24C16
IC4
SDA
SCL
A0
A1
A0
WP
1
5
8
4
6
2
3
7
C7
10
µ
10V
R5
10k
JP1
MAX233
R1OUT
R2OUT
T1OUT
T2OUT
IC5
T1IN
T2IN
R1IN
R2IN
C1–
C1+
C2+
C2+
C2–
C2–
V+
V–
11
18
19
20
13
14
12
V–
17
15
16
10
2
3
1
4
5
6
8
7
9
K2
1
2
3
4
5
6
7
8
9
JP2
AT89S53
EA/VP
ALE/P
RESET
-12JC
INT0
INT1
P0.0
P0.1
P0.2
P0.3
P0.4
P0.5
P0.6
P0.7
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P2.0
P2.1
P2.2
P2.3
P2.4
P2.5
P2.6
P2.7
PSEN
IC3
TXD
RXD
RD
WR
T0
T1
43
42
41
40
39
38
37
36
24
25
26
27
28
29
30
31
35
21
X1
20
X2
22
44
19
18
32
33
13
11
14
15
16
17
10
2
3
4
5
6
7
8
9
C12
100n
C18
100n
AD7715
RESET
IC2
REF+
SCLK
AN-5
REF–
AIN–
AIN+
DOUT
DRDY
OUT
CLK
DIN
15
IN
10
11
14
13
12
CS
16
9
1
5
6
2
3
8
7
A
D
A
D
4
C15
100n
R4
25k5
1%
R2
25k5
1%
R3
25k5
1%
R1
25k5
1%
C1
470n
C2
470n
S4100A
IC1
MPX
4
3
2
C17
100n
C14
100n
DCD
RxD
RTS
TxD
DTR
K3
D1
1N4001
D2
BAT85
S1
C9
100
µ
16V
C11
10
µ
10V
C16
10
µ
10V
C10
10
µ
10V
BT1
9V
D3
1N4001
LP2950CZ5.0
IC6
4k7
P1
UO
R7
10k
L1
4
µ
H7
L2
4
µ
H7
S2
S3
S4
S5
S6
K4
20
19
18
17
16
15
5V
A
5V
A
5V
5V
5V
5V
5V
UO
5V
5V
5V
– U
I
R
5V
A
980097 - 11
5
Gleichheit ausmessen sollte.
Die nächste Fehlerquelle ist der A/D-
Wandler. Glücklicherweise kennt der
Wandler die schon erwähnte Selbstka-
librier-Funktion, die den Nullpunkt
und den Vollausschlag beim Einschal-
ten und alle 30 min korrekt einstellt.
Mit Verstärkungsfehlern und Tempe-
raturdift hat man also ebensowenig zu
kämpfen wie mit missing codes
22
Elektuur
11/98
980097-1
(C) ELEKTOR
C1
C2
C3
C4
C5
C6
C7
C8
C9
C10
C11
C12
C13
C14
C15
C16
C17
C18
D1
D2
D3
H1
H2
H3
H4
H5
H6
IC1
IC2
IC3
IC4
IC5
IC6
JP1
JP2
K1
K2
K3
L1
L2
P1
R1
R2
R3
R4
R5
R6
R7
S2
S3
S4
S5
S6
X1
X2
R
I
-
+
BT1
S1
980097-1
K4
980097-1
(C) ELEKTOR
Stückliste
Widerstände:
R1...R4 = 25k5 1%
R5,R7 = 10 k
R6 = Array 8
⋅10 k
P1 = Trimmpoti 4k7
Kondensatoren:
C1,C2 = 470 n MKT
C3...C6 = 22 p keramisch
C7,C8,C11,C16 = 10
µ/10 V stehend
C9 = 100
µ/16 V stehend
C10 = 10
µ/16 V stehend
C12...C15,C17,C18 = 100 n kera-
misch
Spulen:
L1,L2 = 4
µ7
Halbleiter:
D1,D3 = 1N4001
D2 = BAT85
IC1 = MPXS4100A (Motorola, Con-
rad 143200)
IC2 = AD7715AN-5 (Analog Devices)
IC3 = AT89S53-12JC
IC4 = AT24C16
IC5 = ADM233L (Analog Devices) (=
MAX233)
IC6 = LP2950CZ5.0
Außerdem:
X1 = Quarz 2,4576 MHz
X2 = Quarz 11,0592 MHz
JP1 = 2poliger Jumper
JP2 = 3poliger Jumper
K1 = 2
⋅10poliger Pfostenverbinder
mit Schutzkragen
K2 = 9poliger Sub-D-Verbinder
(female) für Platinenmontage,
gewinkelt
K3 = Kleinspannungsbuchse für Pla-
tinenmontage
K4 = 1
⋅6poliger Verbinder (male und
female)
BT1 = 9-V-Block mit Clip
S1 = Schalter 1
⋅an
S2...S6 = Drucktaster D6-R-RD mit
Kappe D6Q-RD-CAP (ITC)
Gehäuse Bopla E435
LC-Display 2
⋅16 Zeichen
5 cm 20poliges Flachbandkabel
1 Flachbandkabelverbinder
Fassung für IC3
Platine EPS 980097-1
Software (Disk) EPS 986031-1
(siehe Service-Seiten in der Heft-
mitte)
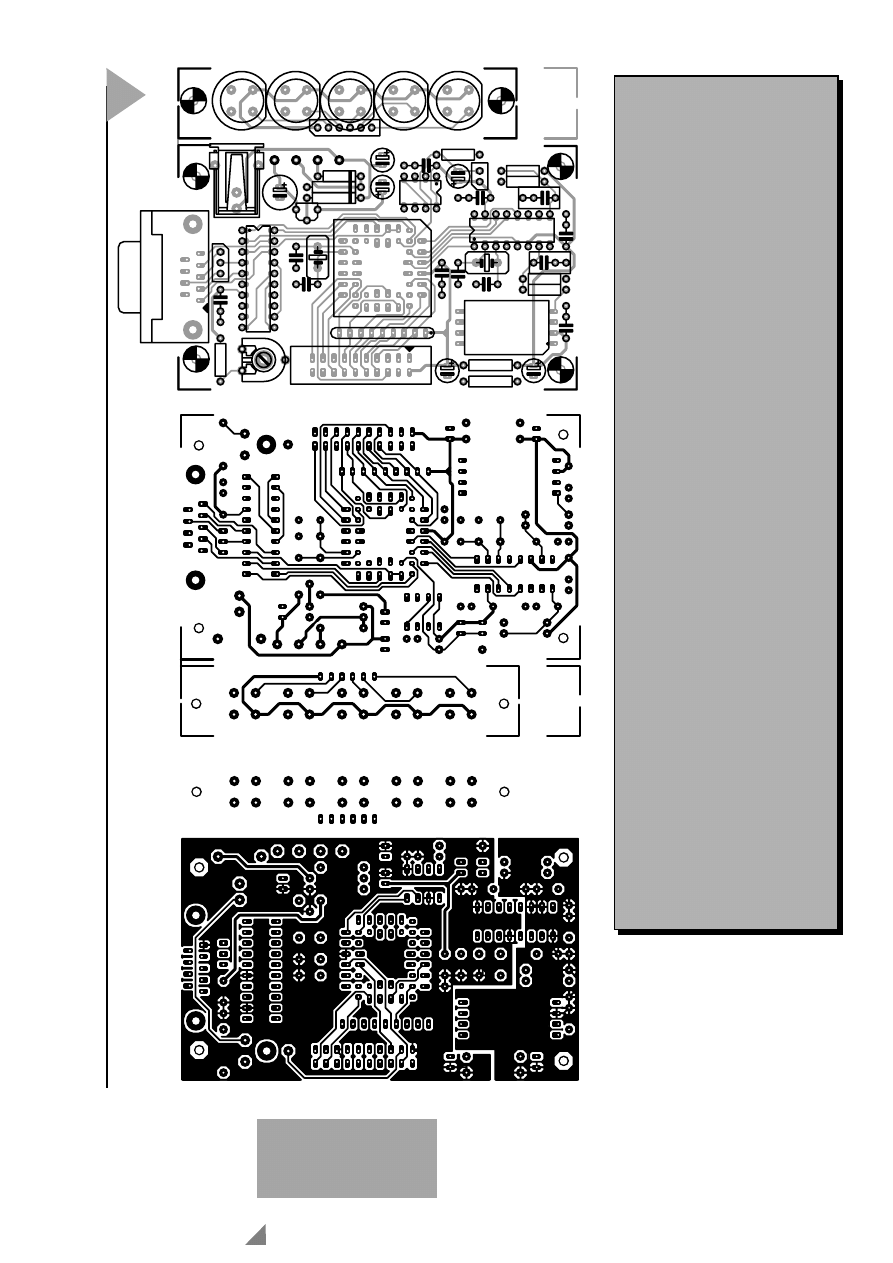
Bild 6. Die Schaltung
kann kompakt auf die-
ser doppelseitigen Pla-
tine aufgebaut werden.
6
(Daten, die durch “unglückliches”
Timing verloren gehen). Einzig die
Nichtlinearität des Wandlers von
0,0015 % muß in die Fehlerrechnung
mit einbezogen werden. Zählt man
alles zusammen, erhält der Controller
Daten, die mit Abgleich einen Fehler
von weniger als 1,8 % aufweisen.
Ohne Abgleich sind es im ungünstig-
sten Fall 5,8 %.
A
U F B A U
Bevor wir uns an den Aufbau des Meß-
gerätes machen, noch einmal zur
Schaltung. Die Spannungsversorgung
erfolgt wahlweise durch ein 12-V-
(Stecker-) Netzteil oder eine 9-V-Block-
batterie. Da der Strombedarf mit 25
mA ziemlich hoch liegt, kommt eine
Versorgung aus dem 9-V-Block bei
Dauerbetrieb kaum in Frage. Die bei-
den Spannungsquellen können auch
gleichzeitig angeschlossen sein, die
Dioden D1 und D2 verhindern, daß sie
sich ins Gehege kommen können.
Die Spannung wird von einem Fest-
spannungsregler auf 5 V stabilisiert.
Der eingesetzte L2950CZ-5.0 ist ein
sogenannter micropower voltage regulator
und zeichnet sich durch einen sehr
niedrigen Ruhestrom (typ. 75 µA) und
Spannungsverlust (unter 400 mV) aus.
Der Regler kann bis zu 100 mA liefern.
Direkt hinter dem Spannungsregler
wird durch P1 die Kontrastspannung
U
0
für das LC-Display angegriffen.
Auch die Digital-ICs sind direkt am
Regler angeschlossen. Zwei Drosseln
(L1 und L2) entkoppeln die 5-V-Span-
nung, die zum Sensor geführt wird
und gleichzeitig zum Versorgungs-
und Referenzspannungseingang des
analogen Teils des Wandlers.
Die Platine in Bild 6 muß zunächst in
zwei Teile gebrochen werden. Den
kleinen Abschnitt bestückt man mit
fünf Drucktastern, dem Verbinder K4
und bringt ihn am gemäß Frontplat-
tenlayout (Bild 7) vorbereiteten
Gehäusedeckel an.
Wegen der engen Leiterbahnführung
und der doch recht kompakten
Bestückung der “großen” Platine sollte
man einen kleinen Lötkolben verwen-
den und besondere Sorgfalt walten
lassen, da sich Lötfehler nur schwer
beheben lassen. Achten Sie besonders
auf die korrekte Polung der entspre-
chenden Bauteile und vermeiden Sie
Lötbrücken.
Wenn alles korrekt auf der Platine
sitzt (sie sieht dann so aus wie in Bild
8) und diese in das Gehäuse einge-
baut ist, der Deckel mit der Tastatur
und der Frontplatte versehen ist,
bleibt nichts weiter zu tun, als auf die
Erläuterung des Programmiervor-
gangs, die Kalibrieranleitung, die Soft-
warebeschreibung und die Bedien-
hinweise, sprich, auf das nächste Elek-
tor-Heft zu warten.
(980097-1)rg
23
Elektuur
11/98
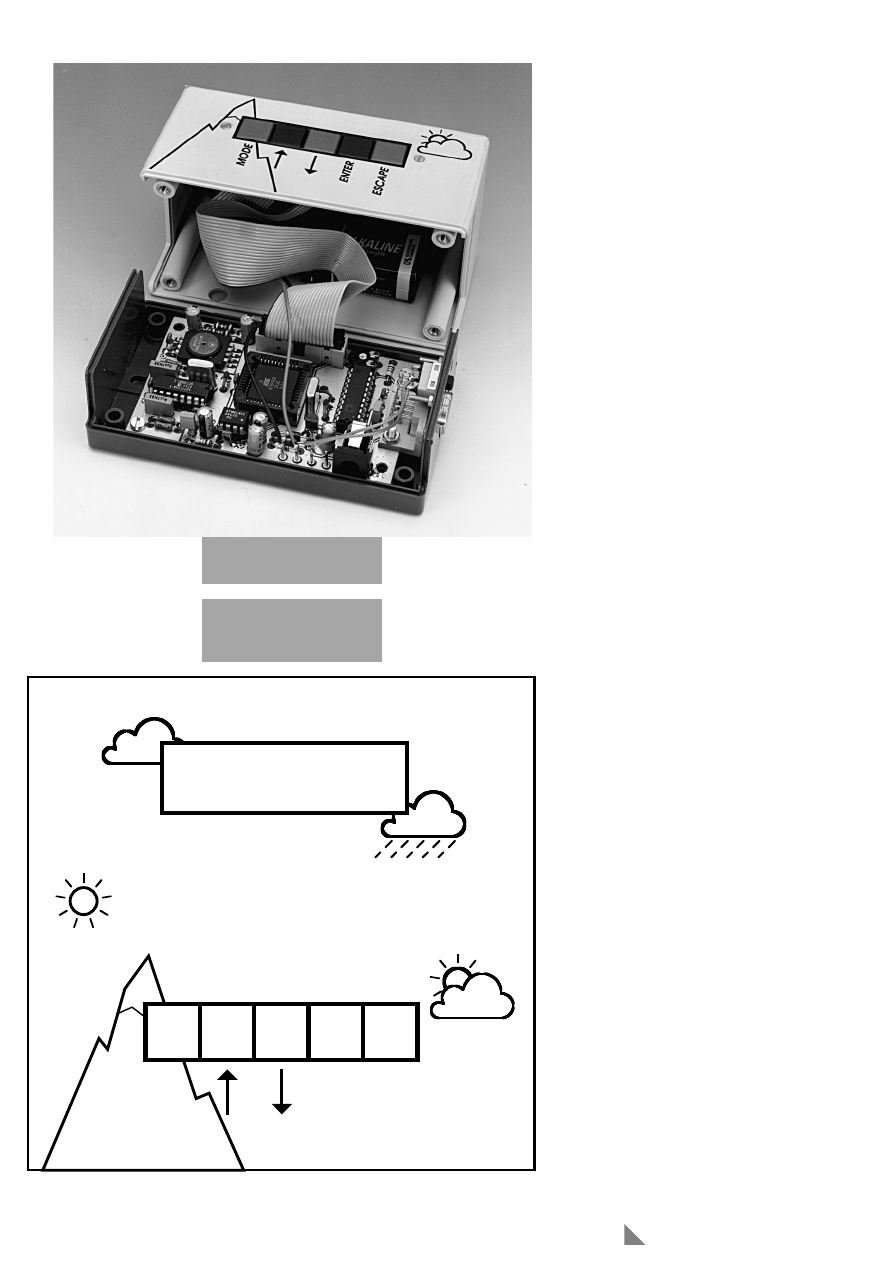
Bild 7. Ein Blick auf die
bestückte Platine.
Bild 8. Ein Frontplatten-
vorschlag für das Meß-
gerät.
ON
POWER
OFF
BAROMETER & ALTIMETER
MODE
ENTER
ESCAPE
980097-F
Wyszukiwarka
Podobne podstrony:
PR CYW PR ROP WYKLAD 26
Stany nagle w położnictwie PR
Pr UE Zródła prawa (IV 2013)
PR CYW PR ROP WYKLAD 28
PR CYW PR ROP WYKLAD 6
Z Pr 1
Pr dewizowe(2)
wyc6 ZI
AM FM SSB Empfänger Teil 1
2013 01 15 ustawa o srodkach pr Nieznany
2008 klucz pr próbna
Cwi 6a PR Lesiu
Odpowiedzi Test przed probna matura 2008 Arkusz PR Wos
fizyka termodynamika pr klucz
chemia3 pr p2012
więcej podobnych podstron