W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
O
PIS RUCHU
,
DRGANIA WŁASNE TŁUMIONE
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
Rys.11.2
Olga Kopacz, Adam Łodygowski, Krzysztof Tymber,
Michał Płotkowiak, Wojciech Pawłowski
Konsultacje naukowe: prof. dr hab. Jerzy Rakowski
Poznań 2002/2003
OPIS RUCHU
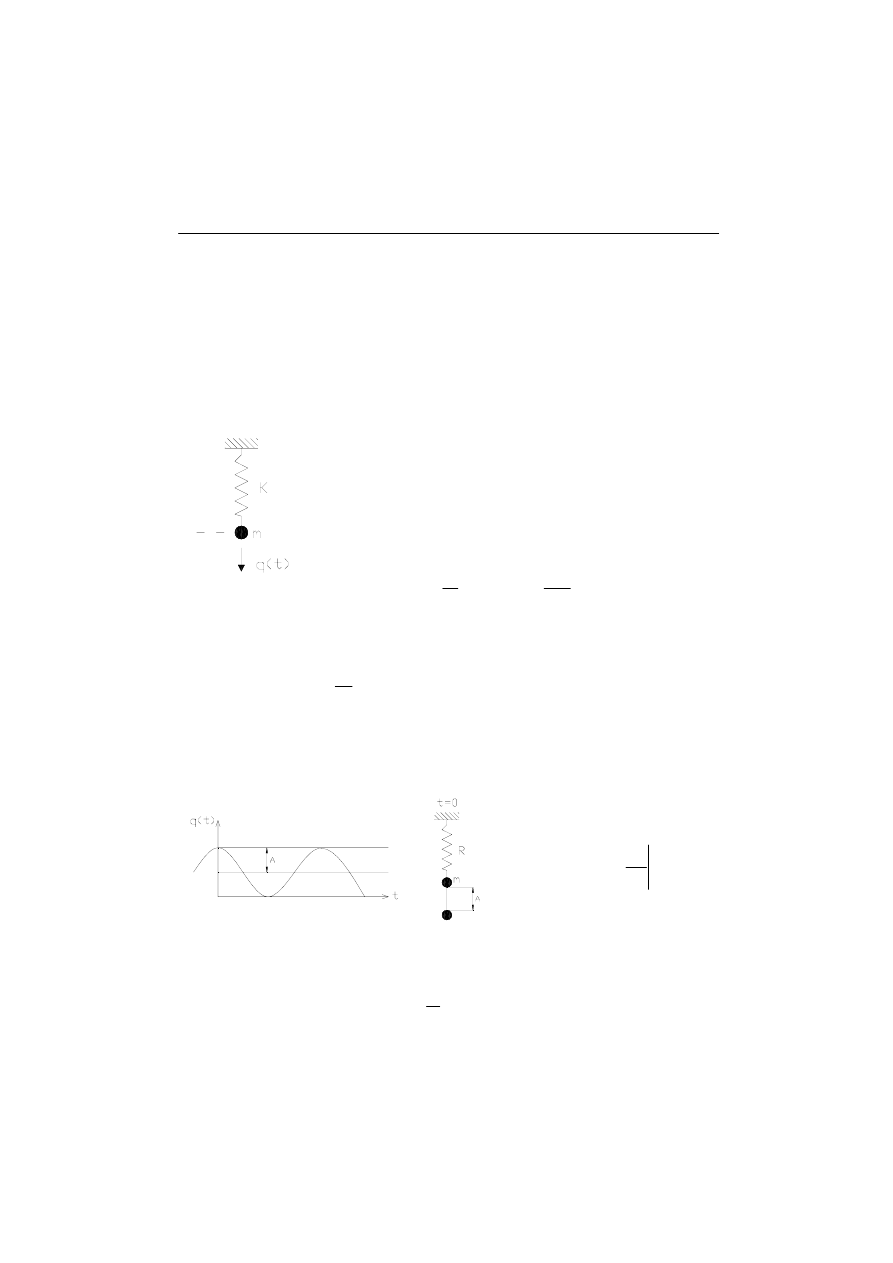
1. 1. Opis ruchu
Przypuśćmy, że mamy układ jak na rysunku
obok (rys.11.1). Zgodnie z zasadą d’Alemberta równanie
równowagi można zapisać:
( )
( )
0
..
=
+
t
q
t
q
m
κ
(11.1)
( )
( )
0
2
..
=
+
t
q
t
q
ω
(11.2)
gdzie:
m
κ
ω =
2
,
2
2
..
dt
d
=
i :
−
m
masa
[ ]
kg
−
q
przemieszczenie w czasie
−
κ
sztywność podpory
m
N
.
Rozwiązaniem jest funkcja
( )
⇒
+
=
t
q
t
q
t
q
c
s
ω
ω
cos
sin
( )
(
)
ϕ
ω +
=
t
A
t
q
sin
,
przy czym kąt
ϕ
-to kąt fazowy. Stałe
ϕ
,
A
wyznaczymy z dwóch warunków
początkowych:
np.
1
0
)
( )
a
q
t
=
⇒
=
0
0
2
0
)
( )
0
0
0
0
.
=
=
⇒
=
=
t
dt
dq
q
t
Z warunków tych otrzymujemy:
(
)
a
A
a
A
A
A
a
=
⇒
=
⇒
=
+
=
2
sin
sin
0
sin
π
ϕ
ϕ
Rys.11.1
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
S
ZCZEGÓLNE PRZYPADKI ŁUKÓW
,
STOPIEŃ STAT
.
NIEWYZNACZALNOŚCI
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
(
)
(
)
2
0
cos
0
cos
0
cos
π
ϕ
ϕ
ϕ
ω
ω
ω
ϕ
ω
=
⇒
=
⇒
+
⋅
=
⇒
+
=
A
t
A
dt
dq
Zatem dla warunków początkowych j.w otrzymujemy pełne rozwiązanie postaci:
( )
t
a
t
a
t
q
ω
π
ω
cos
2
sin
=
+
=
(11.3)
gdzie:
a
-amplituda drgań, to max. wartość przemieszczenia(wychylenia) w stosunku do
położenia równowagi,
ω
-to częstość kołowa drgań własnych (zakładamy brak czynników zaburzających, czyli
nie występuje tłumienie)
[ ]
s
rd
, jest cechą indywidualną każdego ciała (
Jest stała!
)
Uwaga!
Nie ma związku między amplitudą a częstością kołową!
Zgodnie z rozwiązaniem (wzór 11.3) nasza kulka powróci do swego położenia po czasie
odpowiadającym
π
2
. Podstawmy tą wartość do naszego rozwiązania:
( )
(
)
(
)
[
]
T
t
t
t
a
t
q
+
=
+
=
+
=
ω
ω
π
ω
π
ω
cos
2
cos
2
cos
gdzie
ω
π
2
=
T
to okres drgań, czyli czas dzielący dwa identyczne stany rozpatrywanego
ciała (łatwiej można to sobie wyobrazić patrząc na rysunek 11.2).
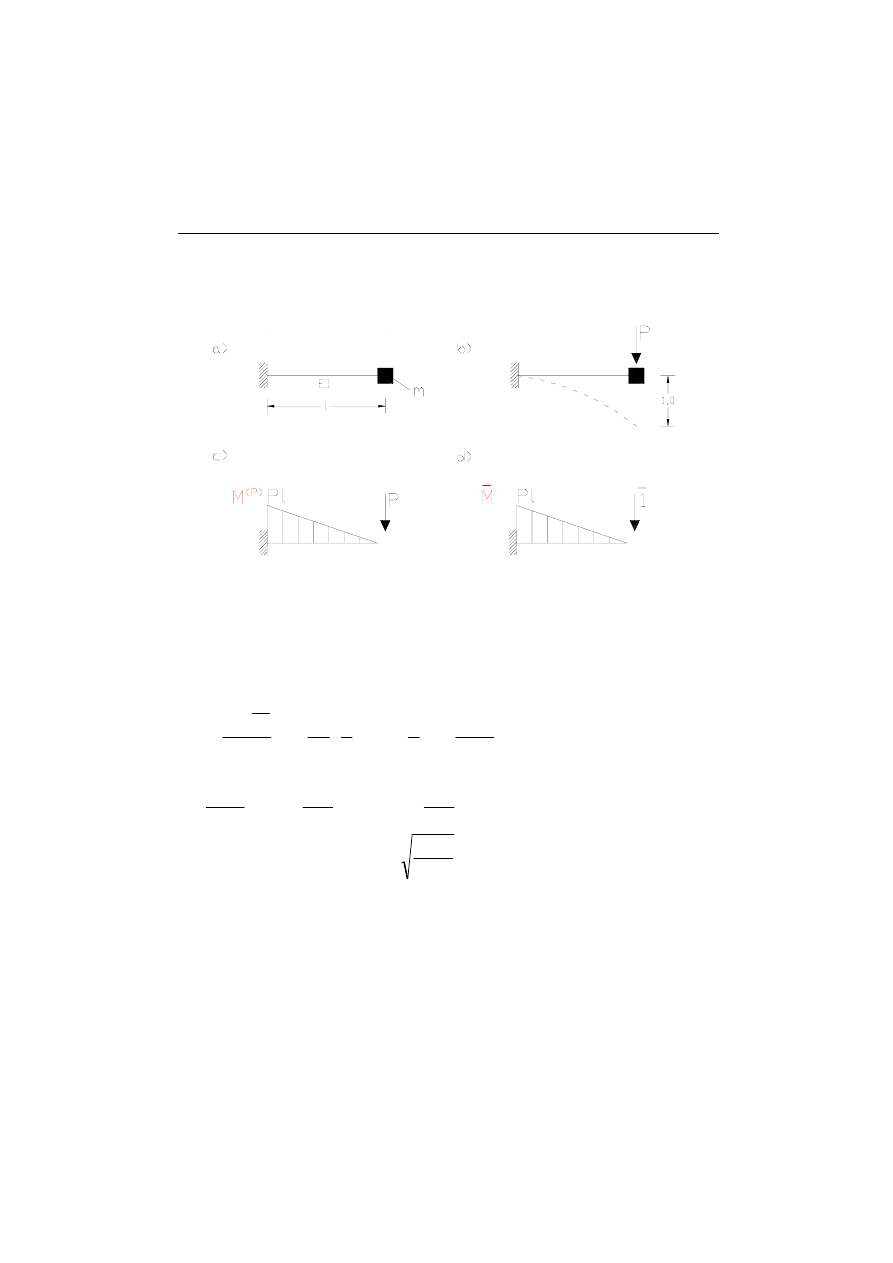
Zadanie 1
Wyznaczyć częstość kołową elementu.
♦
Powiedzmy, że mamy układ jak na rysunku (rys.11.3) z jednym stopniem swobody.
Zakładamy, że masa belki jest znikomo mała w stosunku do nałożonej masy
(powstały w ten sposób błąd będzie bardzo mały i nieistotny dla dalszych
rozważań). Częstość kołowa wyrażana jest wzorem:
m
κ
ω =
(11.4)
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
S
ZCZEGÓLNE PRZYPADKI ŁUKÓW
,
STOPIEŃ STAT
.
NIEWYZNACZALNOŚCI
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
Sztywność belki wyznaczymy korzystając z pracy wirtualnej. W miejscu masy m
przykładamy taką siłę P, która spowoduje jednostkowe ugięcie belki (rys.11.3b) stąd
i
δ
równe będzie 1. Wykonujemy wykresy momentów od zadanej siły P i siły
jedynkowej (rys.11.3c i d)otrzymując:
EI
l
P
l
l
l
P
EI
ds
EI
M
M
3
3
2
2
1
1
3
⋅
=
⋅
⋅
⋅
=
⋅
=
∫
δ
Przyrównując otrzymaną wartość do jedynki:
3
3
3
3
1
l
EI
P
EI
l
P
=
⇒
⋅
=
czyli
3
3
l
EI
=
κ
stąd szukana częstość kołowa wynosi:
3
3
l
m
EI
⋅
=
ω
(11.5)
♦
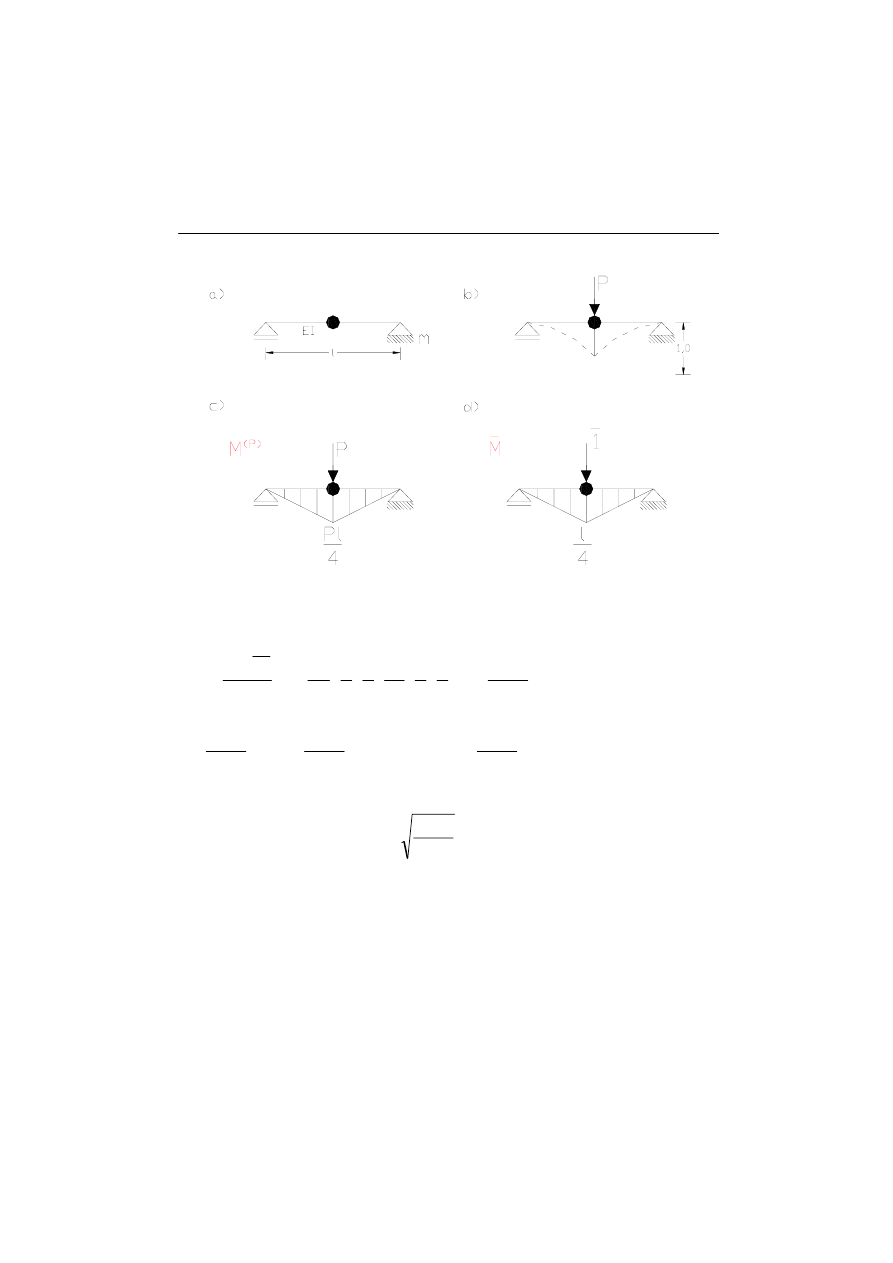
Zajmijmy się teraz belką swobodnie podpartą, której masę sprowadzimy do masy
skupionej umieszczonej w środku jej rozpiętości (rys.11.4). Sposób postępowania
jest analogiczny jak dla belki z przykładu pierwszego. Wykonujemy wykresy
momentów od zadanej siły P i siły jedynkowej.
Rys.11.3
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
S
ZCZEGÓLNE PRZYPADKI ŁUKÓW
,
STOPIEŃ STAT
.
NIEWYZNACZALNOŚCI
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
EI
l
P
l
Pl
l
EI
ds
EI
M
M
48
2
4
3
2
4
2
2
1
1
3
⋅
=
⋅
⋅
⋅
⋅
=
⋅
=
∫
δ
ponieważ :
3
3
48
48
1
l
EI
P
EI
l
P
=
⇒
⋅
=
czyli
3
48
l
EI
=
κ
stąd szukana częstość kołowa
wynosi:
3
48
l
m
EI
⋅
=
ω
(11.6)
przy czym
A
l
m
⋅
⋅
=
ρ
(A-pole przekroju poprzecznego belki).
1. 2. Drgania własne, tłumione.
Tłumienie drgań jest wynikiem działania sił oporu oznaczanych jako
R
. Siły te działają
w ruchu zwanym Voigt. Zakładany w nim tłumienie lekkie (wiskotyczne)
proporcjonalne do prędkości ruch, co zapisujemy:
)
(
~`
t
q
c
R
•
⋅
Rys.11.4
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
S
ZCZEGÓLNE PRZYPADKI ŁUKÓW
,
STOPIEŃ STAT
.
NIEWYZNACZALNOŚCI
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
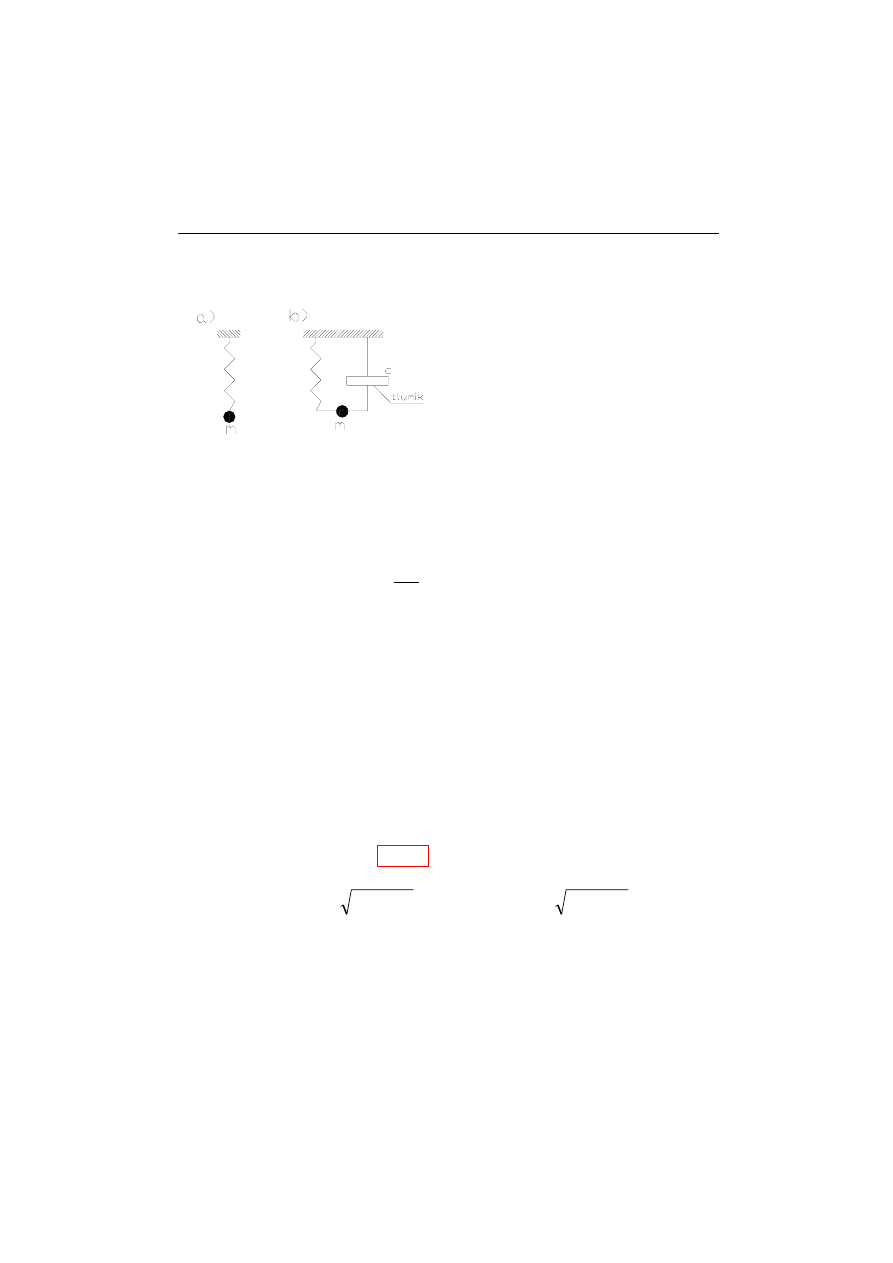
Na rysunku (rys.11.5) widzimy ciało o masie m drgające swobodnie (bez tłumienia) i
podczas tłumienia drgań.
a)drgania własne-układ o jednym
stopniu swobody
b)drgania własne tłumione
Równanie ruch z uwzględnieniem tłumienia przyjmuje postać:
0
)
(
)
(
)
(
=
+
⋅
+
⋅
•
•
•
t
t
q
c
t
q
m
κ
(11.7)
gdzie
c
-stała tłumienia
przy wprowadzeniu zmiennej
m
c
2
=
ρ
równanie przechodzi do postaci:
0
)
(
)
(
2
)
(
2
=
⋅
+
⋅
+
•
•
•
t
q
t
q
t
q
ω
ρ
(11.8)
−
ρ
współczynnik tłumienia drgań.
Rozwiązaniem równania ruchu (wzór11.8) będzie funkcja postaci:
rt
Ae
t
q
=
)
(
.
Podstawiając ją do równania otrzymamy równanie charakterystyczne postaci:
0
2
2
2
=
+
⋅
+
ω
ρ
r
r
(11.9)
Rozwiązując je możemy otrzymać trzy przypadki:
(
)
=
>
<
⇒
−
=
−
=
∆
0
0
0
4
4
4
2
2
2
2
ω
ρ
ω
ρ
♦
Rozważamy małe tłumienia
ω
ρ <
Możliwe są dwa rozwiązania:
2
2
1
ρ
ω
ρ
−
−
−
=
i
r
2
2
2
ρ
ω
ρ
−
+
−
=
i
r
Rozwiązującą funkcją jest funkcja postaci:
)
sin(
)
(
1
ϕ
ω
ρ
+
=
−
t
Ae
t
q
t
(11.10)
co jest równoważne rozwiązaniu:
)
sin
cos
sin(
)
(
2
1
t
c
t
c
e
t
q
t
ω
ω
ρ
+
=
−
(11.11)
Rys.11.5
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
S
ZCZEGÓLNE PRZYPADKI ŁUKÓW
,
STOPIEŃ STAT
.
NIEWYZNACZALNOŚCI
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
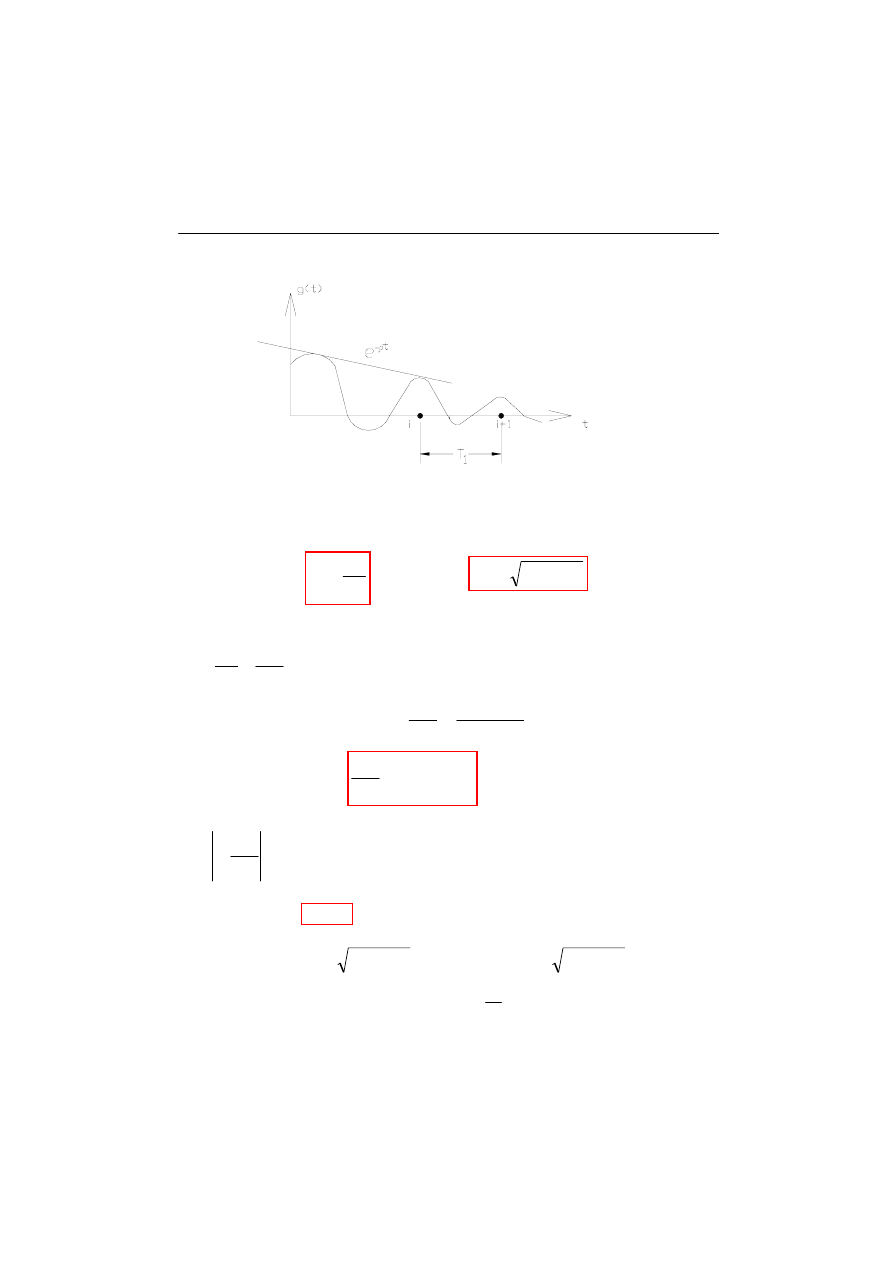
Wykres (rys.11.6) poniżej obrazuje funkcję rozwiązującą (wzór 11.10):
gdzie:
−
1
T
okres drgań własnych tłumionych wynoszący:
1
1
2
ω
π
=
T
a
2
2
1
ρ
ω
ω
−
=
Miarą tłumienia jest to z jaką szybkością następuje redukcja amplitudy, czyli relacja
między dwiema kolejnymi amplitudami podobnych stanów. I tak:
1
1
2
ω
π
=
T
i
i
q
q
1
+
.Podstawiając do funkcji rozwiązującej (11.10) otrzymujemy:]
przy założeniu, że:
1
)
sin(
1
=
+
e
t
ω
(
)
⇒
=
−
+
−
+
t
T
t
i
i
Ae
Ae
q
q
ρ
ρ
1
1
λ
ρ
−
−
+
=
=
e
e
q
q
T
i
i
1
1
(11.12)
przy czym
−
⋅
=
=
+
1
1
ln
T
q
q
i
i
ρ
λ
logarytmiczny dekrement mienia.
♦
Silne tłumienie
ω
ρ >
Możliwe są dwa rozwiązania:
2
2
1
ρ
ω
ρ
−
−
−
=
r
2
2
2
ρ
ω
ρ
−
+
−
=
r
Funkcja rozwiązująca przyjmuje postać:
)
(
)
(
1
2
1
1
t
sh
c
ch
c
e
t
q
t
ω
ω
ρ
+
=
−
(11.13)
Rys.11.5
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
S
ZCZEGÓLNE PRZYPADKI ŁUKÓW
,
STOPIEŃ STAT
.
NIEWYZNACZALNOŚCI
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymper
gdzie:
2
2
1
ω
ρ
ω
−
=
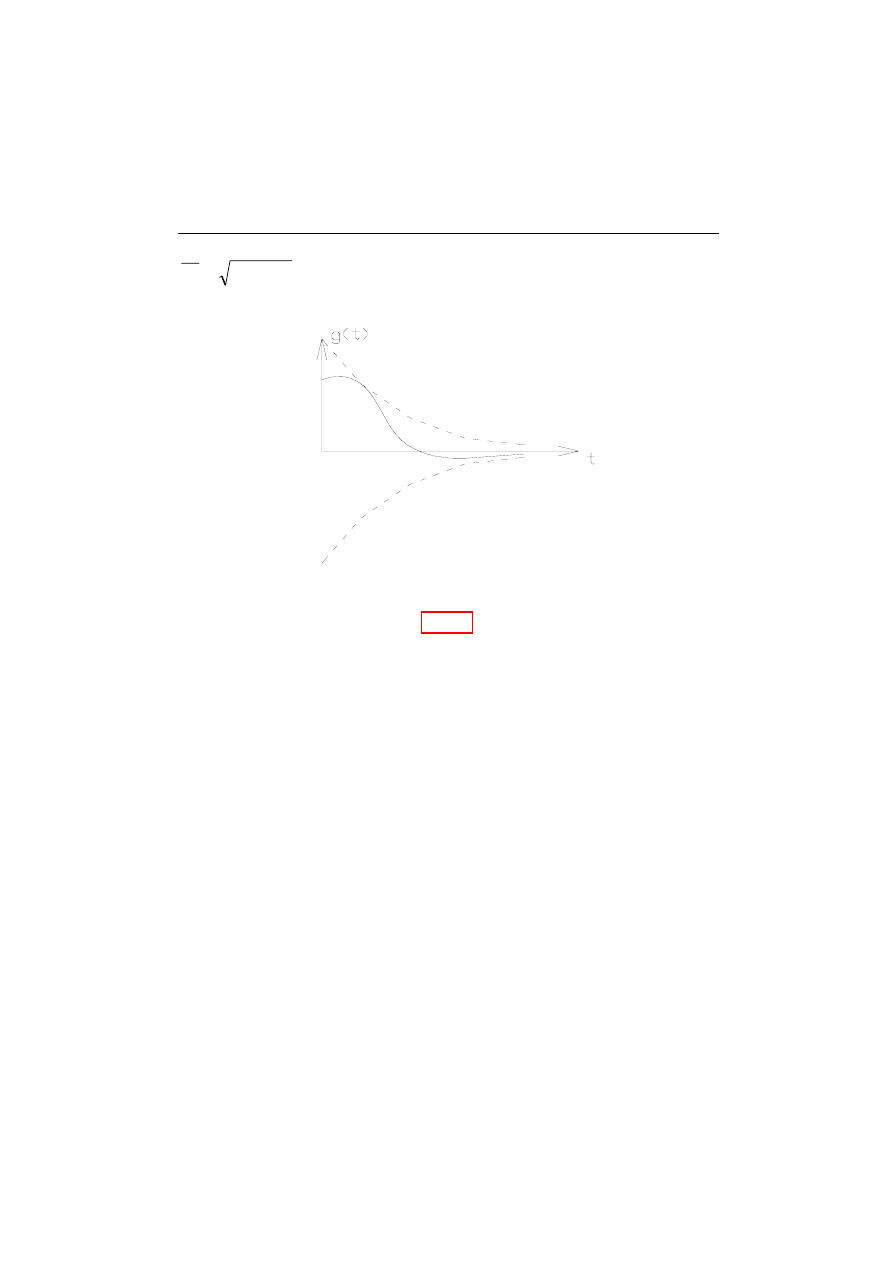
W tym przypadku wykres funkcji rozwiązującej wygląda następująco (rys.11.6):
♦
W trzecim ostatnim przypadku gdy
ω
ρ =
funkcja rozwiązująca jest postaci:
)
(
)
(
2
1
c
t
c
e
t
q
t
+
=
−
ρ
(11.14)
a jej wykres jest taki jak przy silnym tłumieniu(rys.11.6).
Rys.11.6
Wyszukiwarka
Podobne podstrony:
Wykl Mechanika Budowli 15 Opis Ruchu Drgania Wlasne Tlumione
wykl mechanika budowli 01 wstep przypomnienie praca na przemieszczeniach
wykl mechanika budowli 11 linie wplywu belki ciaglej
wykl mechanika budowli 01 wstep przypomnienie praca na przemieszczeniach
Wykl Mechanika Budowli 13 Metoda Przemieszczen
wykl mechanika budowli 09 metoda sil cd
wykl mechanika budowli 07 twierdzenie o wzajemnosci
wykl mechanika budowli 02 praca sil wewnetrznych(1)
wykl mechanika budowli 12 luki statycznie niewyznaczalne
wykl mechanika budowli 04 rownanie pracy wirtualnej(1)
wykl mechanika budowli 06 metoda ciezarow sprezystych
wykl mechanika budowli 18 statecznosc ukladow pretowych
wykl mechanika budowli 22 metoda crossa
OPIS ĆWICZENIA, NAUKA, budownictwo, BUDOWNICTWO sporo, Diamentowa, MECHANIKA BUDOWLI, Mechanika Bud
bud mechanika budowli 03 drgania harmoniczne
Mechanika Budowli II - Laboratorium (rok III), Skręcanie swobodne pręta o przekroju (4), Opis doświa
wykl 8 Mechanizmy
więcej podobnych podstron