W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
1
Olga Kopacz, Adam Łodygowski, Wojciech Pawłowski,
Michał Płotkowiak, Krzysztof Tymber
Konsultacje naukowe: prof. dr hab. J
ERZY
R
AKOWSKI
Poznań 2002/2003
MECHANIKA BUDOWLI 2
PRACA SIŁ WEWNĘTRZNYCH W PRĘTACH
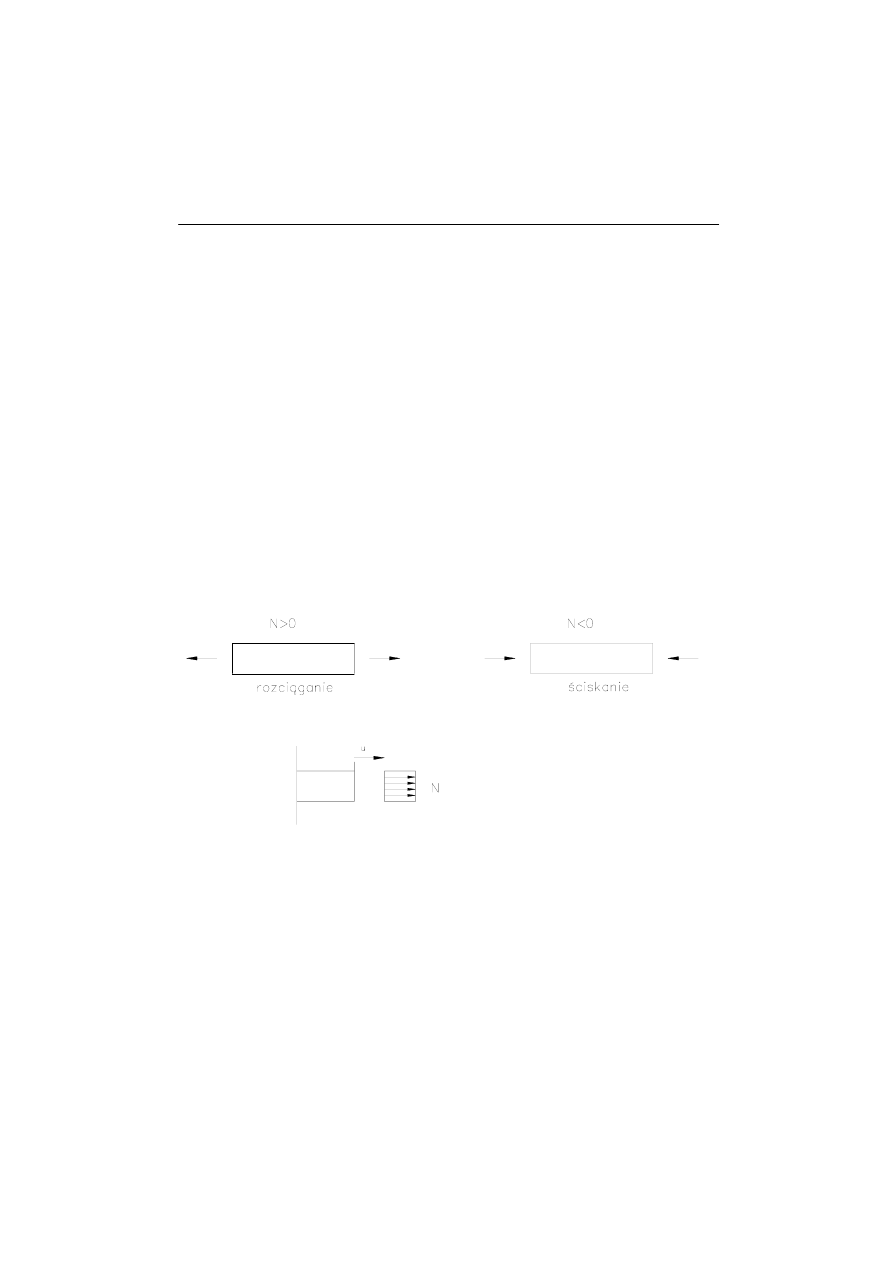
Praca sił normalnych
Siła
normalna
przypomnienie (N):
Jest to siła działająca wzdłuż osi pręta, decydując o rozciąganiu bądź ściskaniu elementu.
Innymi słowy, to suma naprężeń normalnych na powierzchni całego przekroju:
∫
=
A
dA
N
σ
(2.1)
Rys. 1.
Umowne znakowanie siły normalnej
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
2
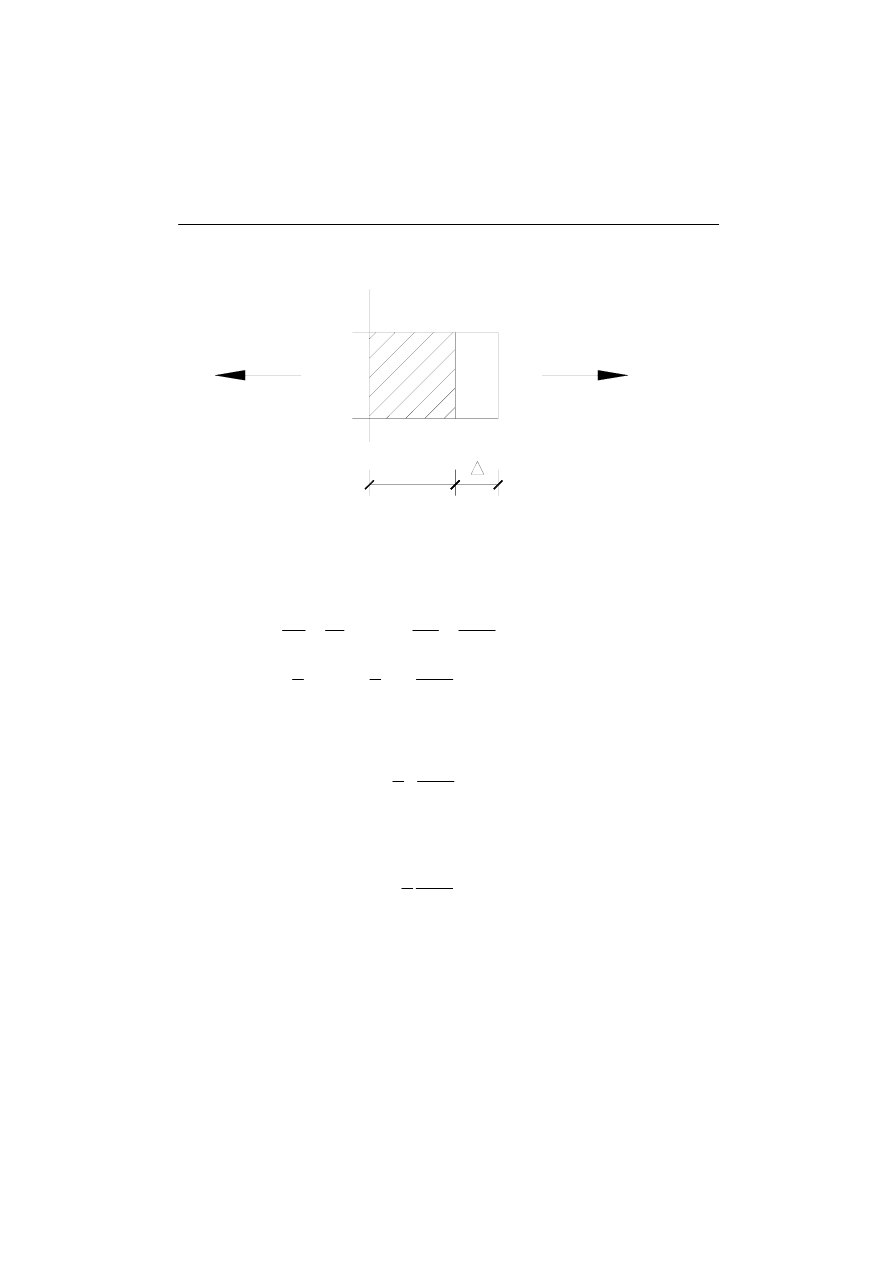
Korzystając ze wzoru (2.1) i prawa Hooke’a można napisać zależności dla wycinaka
pręta o długości ds:
ds
Rys. 2.
Przyrost długości pręta
ds
A
E
N
N
N
dL
A
E
N
E
ds
u
u
A
dA
N
N
N
N
N
A
N
N
⋅
⋅
⋅
=
∆
⋅
⋅
=
⋅
=
=
↔
∆
=
∆
=
⋅
=
=
∫
2
1
2
1
σ
ε
ε
σ
σ
Gdzie
E- moduł Younga
A- pole powirzchni
przekroju
Całkowita praca siły normalnej w pręcie o długości l:
∫
⋅
=
l
N
ds
A
E
N
L
0
2
2
1
(2.2)
Element pracy siły normalnej:
ds
A
E
N
dL
N
⋅
=
2
2
1
(2.3)
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
3
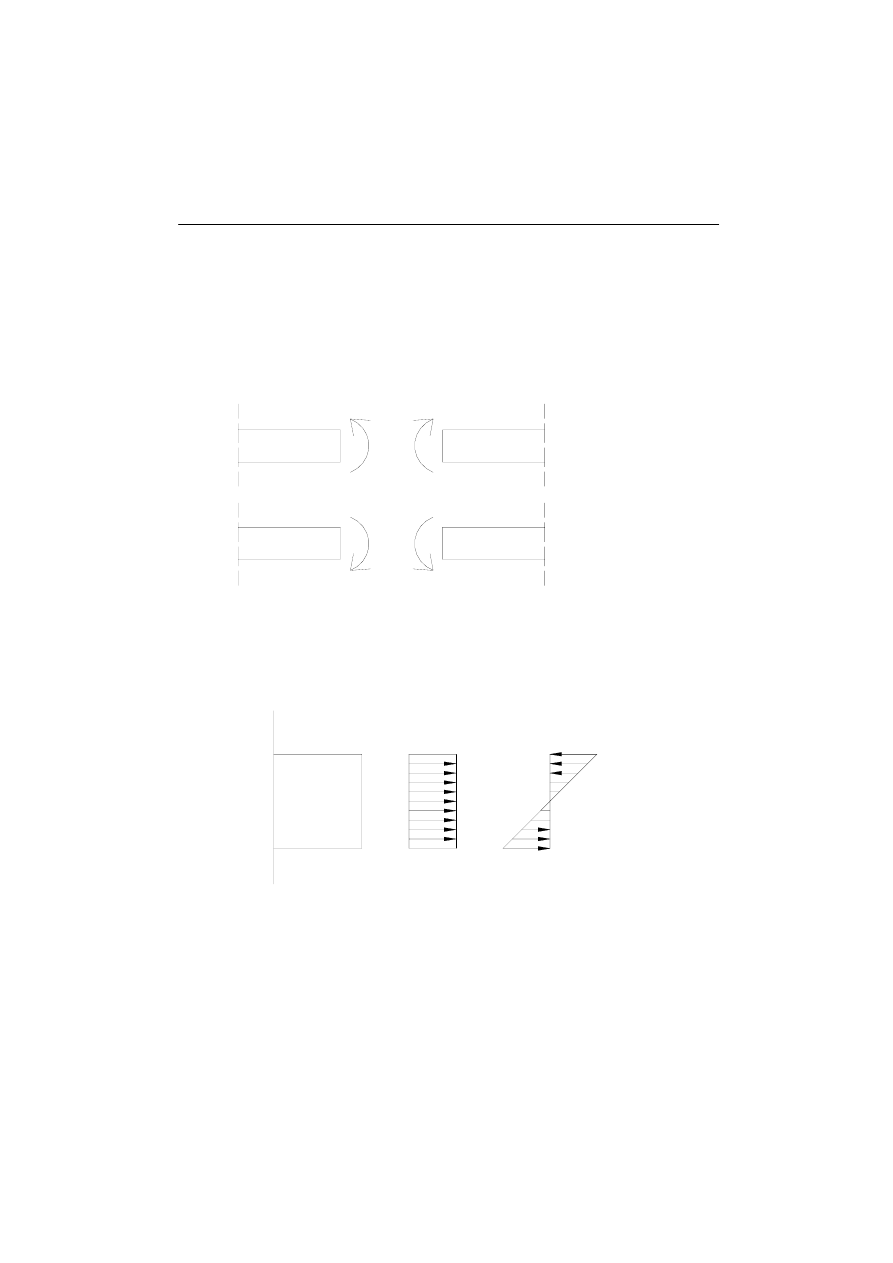
Praca momentów zginających
Moment zginający
przypomnienie: Def
∫
⋅
=
A
zdA
z
M
)
(
σ
(2.4)
Jest to para sił równo oddalonych od siebie, których wynikiem działania jest ściskanie
części włókien i rozćiąganie pozostałych.:
M<0
rozciąganie górnych włókien
M>0
rozciąganie dolnych włókien
Rys. 3. Umowne znakowanie momentó zginających
W przekroju występują naprężenia stałe (od siły normalnej) i zmienne (od momentu
zginającego)
stałe
naprężenia
normalne
zmienne
naprężenia
od momentu
Rys. 4. Naprężenia stałe i zmienne
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
4
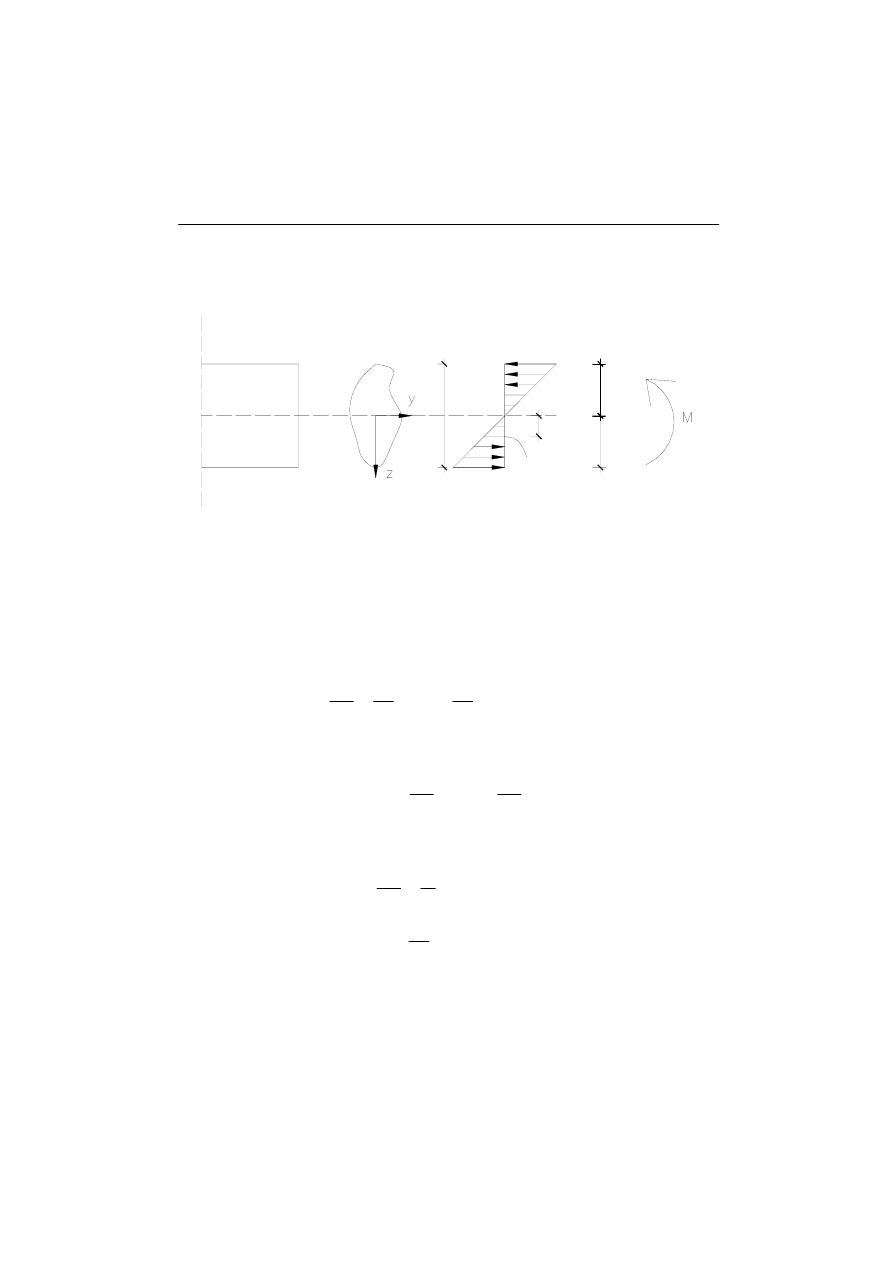
h
g
h
d
z
h
Naprężenia występujące od momentu zginającego decydują o ściskaniu części włókien i
rozciąganiu pozostałej części:
σ
z
= σ
Rys. 5. Naprężenia zmienne od momentu zginającego
Górna rzędna naprężenia od momentu σ
g
Górna rzędna naprężenia od momentu σ
d
Korzystając ze wzoru (2.4) i zależności geometrycznych (twierdzenie Talesa)
otrzymujemy:
d
d
d
d
z
h
z
h
z
σ
σ
σ
σ
=
→
=
(2.5)
y
d
d
A
d
d
A
z
I
h
dA
z
h
zdA
M
σ
σ
σ
∫
∫
=
⋅
=
=
2
(2.6)
Wobec tego:
z
I
M
z
h
y
d
d
⋅
=
=
σ
σ
σ
(2.7)
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
5
dx=ds
z
promień
krzywizny
Biegun
chwilowego
obrotu
2
∆
na wysokości z
Rys. 6. Nieskończenie mały element, poddany momentowi zginającemu
ρ- promień krzywizny,
2
ϕ
d
- połowa kąta zawartego między promieniami krzywizny,
ρ
ϕ
ϕ
ρ
ds
d
d
ds
=
→
=
(2.8)
Przyrost długości ds jest symetryczny względem promienia krzywizny, dlatego przyrośt
po jednej stronie wynosi:
z
d
zd
d
z
∆
=
=
∆
=
∆
ϕ
ϕ
ϕ
2
2
(2.9)
Przyrost ds jest odkształceniem liniowym, dlatego korzystając z prawa Hooke’a można
zapisać relacje między przyrostem włókna a naprężeniami.
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
6
ds
E
ds
E
ds
z
z
z
z
σ
σ
ε
ε
=
∆
∆
=
=
=
∆
)
(
(2.10)
Podstawiając wzór na naprężenie (2.7) i na kąt obrotu (2.9) otrzymujemy:
ds
I
E
M
d
z
d
ds
I
E
z
M
y
y
⋅
=
∆
=
⋅
⋅
=
∆
ϕ
ϕ
(2.11)
Wykorzystując wzór (2.11) i prawo Hooke’a otrzymujemy relację między krzywizną (χ)
a momentem:
y
I
E
M
ds
d
⋅
=
=
=
χ
ρ
ϕ
1
(2.12)
χ- to odwrotność promienia krzywizny.
Element pracy momentu zginającego, który działa na obrocie wynosi:
ds
I
E
M
ds
I
E
M
M
Md
dL
y
y
M
⋅
=
⋅
⋅
⋅
=
⋅
=
2
2
1
2
1
2
1
ϕ
(2.13)
Całkowita praca momentu w pręcie o długości l:
∫
⋅
=
l
y
M
ds
I
E
M
L
0
2
2
1
(2.14)
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
7
Praca sił poprzecznych
Siła poprzeczna
przypomnienie
Siła poprzeczna jest sumą wszystkich naprężeń stycznych w przekroju
Indeks pierwszy określa płaszczyznę na jakiej działa siła
Indeks drugi określa kierunek dodatniej osi naprężeń stycznych
)
(
)
(
z
b
I
z
S
T
dA
T
y
y
xz
xz
A
xz
xz
⋅
⋅
=
=
∫
τ
τ
(2.15)
W powyższym siła działa na płaszczyźnie x o kierunku z.
System znakowania siły poprzecznej
T<0
kręci odciętą
częścią w lewo
T>0
kręci odciętą
częścią w prawo
Rys. 7. System znakowania siły poprzecznej
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
8
ds
b(z)
h
d
Rys. 8. Rysunek poglądowy działania siły poprzecznej
Wynikiem działania sił stycznych jest deformacja przedstawiona na rysunku (w
zdecydowanej przesadzie)
xz
γ
Rys. 9. Rezultaty działania siły poprzecznej na elemencie: a) γ- kąt odkształcenia
postaciowego, b) ∆- wynik działania sił stycznych
G
ds
t
xz
xz
xz
τ
γ
γ
=
=
∆
(2.16)
We wzorze (2.16) G jest modułem odkształcenia postaciowego Kirchhoffa.
W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
9
(
)
ν
+
⋅
=
1
2
E
G
(2.17
E- moduł Younga, ν- współczynnik Poissona
Równanie pracy jest przedstawione wyłącznie dla poletka dA, w którym występują
elementy siły poprzecznej. Jeżeli chciałoby się otrzymać całkowitą pracę, należałoby
zsumować wszystkie poletka dA- czyli scałkować.
T
T
dT
dL
dA
dT
∆
=
=
2
1
τ
(2.18)
Przyrost pracy elementu siły poprzecznej przypadającej na poletko dA leżące na włóknie
b(z) dla elementarnego wycinka pręta o długości ds.
dAds
z
b
z
S
I
A
GA
T
L
d
dAds
z
b
I
z
S
T
G
z
b
I
z
S
T
L
d
ds
dA
L
d
y
T
y
y
xz
y
y
xz
T
xz
xz
T
)
(
)
(
2
1
)
(
)
(
1
)
(
)
(
2
1
2
1
2
2
2
3
3
3
⋅
⋅
⋅
=
⋅
⋅
⋅
⋅
⋅
⋅
=
⋅
=
γ
τ
(2.19)
Przyrost pracy całej siły poprzecznej w przekroju dla wycinka ds:
⋅
⋅
⋅
=
∫
A
y
T
dA
z
b
z
S
I
A
GA
T
dL
)
(
)
(
2
1
2
2
2
(2.20)
Wprowadzamy upraszczający zapis na ścinanie:
∫
⋅
⋅
=
dA
z
b
z
S
I
A
y
)
(
)
(
2
2
κ
(2.21)
ds
T
ds
GA
T
T
dL
śr
T
γ
κ
⋅
⋅
=
⋅
⋅
=
2
1
2
1
(2.22)

W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
10
Wzór (2.23) w nawiązaniu do poprzednich (praca N i praca M) można przez analogię
zinterpretować jako pracę siły poprzecznej na uśrednionym przemieszczeniu wwołanym
odkształceniem postaciowym (γ
śr
ds)
A
T
G
G
śr
śr
κ
τ
γ
⋅
=
=
1
1
(2.23)
Całkowita praca na długości pręta z uwzględnieniem współczynnika ścinania wynosi:
∫
⋅
=
l
T
ds
GA
T
L
0
2
2
1
κ
(2.24
Podsumowanie
Rodzaje występujących sił w przekroju
F-
uogólniona siła,
∆-
uogólnione przemieszczenie
∆
∆
⇒
⋅
⋅
⋅
=
∆
=
→
=
T
N
śr
d
d
d
ds
s
ds
s
ds
ds
s
s
s
T
M
N
s
F
ϕ
γ
χ
ε
δ
)
(
)
(
)
(
)
(
)
(
)
(
)
(
(2.25)
Wszystkie współczynniki charakteryzują się bardzo podobną strukturą- siła/ sztywność
(na rozciąganie, zginanie, ścinanie)
GA
T
EI
M
EA
N
śr
κ
γ
χ
ε
=
=
=
(2.26)
Wzór na całkowitą pracę sił wewnętrznych jest sumą prac tych wszystkich sił w pręcie:
∫
∫
∫
⋅
+
⋅
+
⋅
=
l
l
l
ds
GA
T
ds
EA
N
ds
EI
M
L
0
2
0
2
0
2
2
1
2
1
2
1
κ
(2.27)

W
Y K Ł A D Y Z
M
E C H A N I K I
B
U D O W L I
P
RACA SIŁ WEWNĘTRZNYCH W PRĘTACH
Politechnika Poznańska® Kopacz,
Łodygowski, Pawłowski, Płotkowiak, Tymber
11
Wyszukiwarka
Podobne podstrony:
wykl mechanika budowli 09 metoda sil cd
wykl mechanika budowli 01 wstep przypomnienie praca na przemieszczeniach
wykl mechanika budowli 01 wstep przypomnienie praca na przemieszczeniach
bud mechanika budowli - 02, met przemieszczen
wykl mechanika budowli 11 linie wplywu belki ciaglej
Wykl Mechanika Budowli 15 Opis Ruchu Drgania Wlasne Tlumione
Wykl Mechanika Budowli 13 Metoda Przemieszczen
wykl mechanika budowli 07 twierdzenie o wzajemnosci
wykl mechanika budowli 12 luki statycznie niewyznaczalne
wykl mechanika budowli 04 rownanie pracy wirtualnej(1)
wykl mechanika budowli 06 metoda ciezarow sprezystych
wykl mechanika budowli 18 statecznosc ukladow pretowych
wykl mechanika budowli 15 opis ruchu drgania wlasne tlumione
wykl mechanika budowli 22 metoda crossa
Cwicz Mechanika Budowli Linie Wplywowe Sil W Belkach Ciaglych(1)
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
Mechanika budowli Metoda sił belka
Praca sil zewnetrznych i wewnetrznych
więcej podobnych podstron