
4. TEORIA RUCHU POJAZDÓW SZYNOWYCH
Dynamika pojazdu szynowego
Ruch postępowy pociągu wzdłuż toru odbywa się pod wpływem działania
następujących sił, a ściślej ich rzutów na kierunek biegu pociągu:
•
siła pociągowa F [N] – zależna od działań maszynisty lub urządzeń automatycznej
jazdy pociągu; w czasie jazdy wywołana momentami napędowymi silników
trakcyjnych i przypisuje się jej wtedy znak „+”, w czasie hamowania wywołana
działaniem hamulców lub momentów hamujących silników trakcyjnych i przypisuje
się jej wtedy znak „-”
•
opory ruchu W [N] – wszystkie inne siły skierowane wzdłuż drogi pociągu,
niezależne od woli maszynisty; przypisuje im się znak „+”, gdy są skierowane
przeciw ruchowi pociągu i znak „-”, gdy są zgodne z jego kierunkiem.
Różnicę między siłą pociągową a oporami ruchu nazywamy siłą przyśpieszającą F
p
[N], która może być dodatnia lub ujemna.
W
F
F
p
−
=
Energia kinetyczna pociągu
kwir
kp
k
E
E
E
+
=
∑
∑
+
+
=
2
2
2
2
2
2
w
w
k
k
k
I
I
mv
E
ω
ω
gdzie:
m – masa pociągu,
v – prędkość pociągu,
I
k
– moment bezwładności kół wagonów lub lokomotyw,
I
w
– moment bezwładności wirników silników trakcyjnych,
ω
k
– prędkość kątowa kół wagonów lub lokomotyw,
ω
w
– prędkość kątowa wirników silników trakcyjnych.
k
k
R
v
=
ω
l
w
R
z
v ⋅
=
ω
gdzie:
R
k
– promień koła wagonu lub lokomotywy,
R
l
– promień koła lokomotywy,
z – przełożenie przekładni.
+
+
=
+
+
=
∑
∑
∑
∑
2
2
2
2
2
2
2
2
2
2
1
1
2
2
2
2
l
w
k
k
l
w
k
k
k
R
z
I
R
I
m
mv
R
z
v
I
R
v
I
mv
E
+
=
+
=
kp
kwir
kp
kwir
kp
k
E
E
E
E
E
E
1
Wielkość: γ wyraża stosunkowy pozorny wzrost masy pociągu wywołany wpływem
jego mas wirujących.
+
=
∑
∑
2
2
2
1
l
w
k
k
R
z
I
R
I
m
γ
(
)
2
2
1
2
2
v
m
v
m
E
k
⋅
⋅
=
+
=
α
γ
γ
α
+
= 1
Uwzględniając wpływ mas wirujących, masa pozorna pociągu wynosi mα, gdzie
α=1+γ
nosi nazwę współczynnika bezwładności mas wirujących pociągu.

Znając wymiary i momenty bezwładności mas wirujących można współczynnik α
obliczyć osobno dla lokomotywy i wagonów, a następnie dla całego składu pociągu
według wzoru:
∑
∑
=
=
=
n
i
i
n
i
i
i
G
G
1
1
α
α
gdzie:
G
i
– ciężar lokomotywy, wagonu,
α
i
– współczynnik bezwładności lokomotywy, wagonu.

Zwykle nie ma potrzeby dokładnego obliczania wielkości wpływu mas wirujących,
ponieważ wpływ ten jest niemal stały dla określonych rodzajów pojazdów. Wartości
współczynnika α mogą być przyjmowane w następujących granicach:
lokomotywy elektryczne
1,20 – 1,40
wagony motorowe
1,10 – 1,15
wagony osobowe
1,04 – 1,05
wagony towarowe 4-osiowe próżne
1,07 – 1,08
wagony towarowe 4-osiowe naładowane
1,03 – 1,04
tramwaj – wagon motorowy
1,15 – 1,20
tramwaj 2-wagonowy
1,10 – 1,15
trolejbus
1,25 – 1,30

Siła przyspieszająca i przyspieszenie
k
p
dE
ds
F
=
⋅
dt
dv
m
ds
dv
dt
ds
m
ds
dv
v
m
ds
dv
v
m
ds
dv
m
v
m
ds
d
ds
dE
F
k
p
⋅
⋅
=
⋅
⋅
⋅
=
⋅
⋅
⋅
=
⋅
⋅
⋅
=
⋅
⋅
=
⋅
⋅
=
=
α
α
α
α
α
α
2
2
2
2
2
2
a
m
F
p
⋅
⋅
=
α
α
⋅
=
m
F
a
p
lub
α
α
g
f
g
G
F
a
p
p
⋅
=
⋅
=
gdzie f
p
jest jednostkową siłą przyspieszającą tj. siłą przyspieszającą przypadającą na
jednostkę ciężaru pociągu. Taki wzór będzie słuszny, jeżeli f
p
jest bezwymiarowa, to
znaczy kiedy siła F
p
oraz ciężar G określone są w tych samych jednostkach
W praktyce F
p
podaje się w [N], a G w [kN].
Dlatego wprowadzono jednostkową siłę określaną w promilach jako stosunek [N/kN]:
]
[
]
[
]
/
[
00
0
kN
G
N
F
f
p
p
=
]
[
]
[
]
/
[
00
0
kN
G
N
F
f
=
]
[
]
[
]
/
[
00
0
kN
G
N
W
w
=
jednostkowa siła przyspieszająca
jednostkowa siła pociągowa
jednostkowe opory ruchu
Jeżeli: m[t], G[kN], F[N], W[N], F
p
[N],
przyspieszenie oblicza się następująco:
α
α
α
α
α
α
102
1
)
(
1000
)
(
1000
1000
1000
1000
⋅
−
=
⋅
−
=
⋅
=
⋅
−
=
⋅
=
⋅
=
w
f
g
w
f
g
f
g
G
W
F
g
G
F
m
F
a
p
p
p

Opory ruchu
Na pociąg będący w ruchu, oprócz siły pociągowej, działa wiele sił różnego
rodzaju i pochodzenia, których większość skierowana jest zwykle przeciw ruchowi
pociągu. Rzuty tych wszystkich sił, odniesionych do obwodu kół pociągu, na
kierunek jego biegu nazywamy oporami ruchu. Przypisujemy im znak „+”, gdy
są skierowane przeciw ruchowi pociągu i znak „-”, gdy ich kierunek jest zgodny z
ruchem pociągu
Wszystkie opory składowe jak i całkowite określa się jako siłę w [N] lub w
postaci oporów jednostkowych, odniesionych do 1kN ciężaru pociągu, w [N/kN] lub
[
0
/
00
].
Opory ruchu można podzielić na opory zasadnicze, opory profilu linii oraz
opory dodatkowe ośrodka.

Opory zasadnicze ruchu
Opory zasadnicze są nierozłącznie związane z toczeniem się pojazdu, działają stale przy
jeździe pociągu po torze otwartym w linii prostej i poziomej, bez wiatru. Do oporów
zasadniczych należą:
•opory wewnętrzne taboru,
•opory toru,
•opory ośrodka powietrznego na czołowe i boczne ściany lokomotywy i wagonów.
Ze względu na trudność analitycznego ujęcia zjawisk, praktyka kolejowa ogranicza się do
pomiarów całkowitych zasadniczych oporów ruchu danego rodzaju pociągu w danych
warunkach. Na podstawie dużej ilości pomiarów tworzy się odpowiednie wzory
empiryczne.
Postać większości wzorów na zasadnicze opory ruchu to trójmian kwadratowy będący
funkcją
prędkości. Wpływ niektórych czynników uwzględnia się
w wartości
współczynników trójmianu.
2
2
1
v
w
v
w
w
w
o
+
+
=
Wzory opracowane dla kolei rosyjskich
• dla 2 i 3-osiowych wagonów towarowych
v
m
w
w
⋅
+
+
=
25
1
02
,
0
4
,
1
• dla 4-osiowych wagonów towarowych
w
m
v
w
55
,
0
12
65
+
+
=
• dla 2 i 3-osiowych wagonów pasażerskich
2
0003
,
0
017
,
0
4
,
1
v
v
w
+
+
=
• dla 4 i 6-osiowych wagonów pasażerskich
2
0003
,
0
012
,
0
4
,
1
v
v
w
+
+
=
(określają jednostkowe opory
ruchu w funkcji v – prędkość
pociągu w [km/h] )
• dla lokomotyw
2
0005
,
0
01
,
0
4
,
1
v
v
w
+
+
=
• dla zespołów trakcyjnych
(
)
2
0
045
,
0
1
0064
,
0
v
m
m
n
v
k
w
w
D
M
⋅
+
+
−
+
⋅
+
=
gdzie:
m
w
– masa wagonu w [t]
n
– całkowita liczba wagonów
w pociągu,
m
M
–
masa wagonów
motorowych [t],
m
D
–
masa wagonów
doczepnych [t].
62
,
1
0
=
w
014
,
0
=
k
dla jazdy pod
prądem
5
,
2
0
=
w
03
,
0
=
k
dla jazdy bez
prądu
Wzór Francka
(
)
2
2
10
2
1
,
1
54
,
0
10
0142
,
0
5
,
2
⋅
+
+
⋅
+
+
=
v
nq
S
k
m
v
w
gdzie:
m – całkowita masa pociągu w [t],
n – liczba wagonów,
kS – przekrój zastępczy lokomotywy w [m
2
], przy czym S stanowi przekrój
rzeczywisty i wynosi zwykle 10-12 m
2
, zaś k jest współczynnikiem
uwzględniającym wpływ kształtu ściany przedniej lokomotywy:
k = 1,0 - dla przodu płaskiego,
k = 0,8 – dla przodu z krawędziami zaokrąglonymi,
k = 0,6 – dla przodu całkowicie zaokrąglonego,
k = 0,35 – dla przodu o kształcie opływowym,
q – współczynnik zależny od rodzaju wagonu:
q = 0,56 – dla wagonów krytych (towarowych i osobowych),
q = 0,32 – dla wagonów otwartych załadowanych,
q = 1,62 – dla wagonów otwartych próżnych

Wzory opracowane dla kolei polskich przez Centrum Naukowo-Techniczne
Kolejnictwa (
wzory określają opory w [N] w funkcji prędkości v w [km/h])
• dla wagonów
(
)
2
10
5
,
2
150
10
5
,
1
⋅
+
⋅
+
+
⋅
+
=
v
n
f
n
m
v
K
W
o
w
w
gdzie:
K
– współczynnik rodzaju łożysk, który wynosi:
dla łożysk tocznych 6,5; dla łożysk ślizgowych 9,0
m
w
– masa wagonów w [t],
n
o
– liczba osi w pociągu
f
– współczynnik rodzaju pociągu, który wynosi:
dla wagonów pasażerskich 10
dla wagonów towarowych 8,
n –
liczba wagonów w pociągu.
• dla lokomotywy
2
10
35
150
10
5
,
1
9
+
+
⋅
+
=
v
n
m
v
W
o
l
l
gdzie:
m
l
–
masa lokomotywy w [t],
n
o
– liczba osi lokomotywy
• całkowite opory ruchu pociągu
[N]
l
w
W
W
W
+
=
l
w
G
G
W
w
+
=
jednostkowe opory ruchu [N/kN]
• dla zespołów elektrycznych i spalinowych
(
)
2
10
7
,
2
10
150
10
5
,
1
⋅
+
⋅
+
+
⋅
+
=
v
n
n
m
v
K
W
o
j
j
gdzie:
K
– współczynnik rodzaju łożysk, jak we wzorze dla wagonów,
m
j
–
masa zespołu wraz z pasażerami [t],
n
o
– liczba osi w zespole,
n
– liczba wagonów w zespole

W przypadku braku dokładnych danych odnośnie wartości mas poszczególnych
pojazdów, można przyjmować następujące wartości średnie:
4-osiowy wagon pasażerski z obciążeniem
42 t
wagon towarowy próżny 2-osiowy
10 t
wagon towarowy próżny 4-osiowy
20 t
wagon towarowy 2-osiowy całkowicie załadowany
33 t
wagon towarowy 4-osiowy całkowicie załadowany
80 t
lokomotywa 4-osiowa
80 t
lokomotywa 6-osiowa
120 t
wagon motorowy w zespole trakcyjnym
55 t
wagon doczepny w zespole trakcyjnym
40 t
(masy dla wagonów w zespole trakcyjnym podane są bez pasażerów, zwykle
przyjmuje się zapełnienie 150 osób o masie 70 kg na wagon)

Wzór profesora Jaworskiego
2
0
10
1
+
=
v
k
w
w
[N/kN]
gdzie:
2
0
=
w
+
=
G
G
w
L
1
2
0
jazda pod prądem i hamowanie
jazda z rozpędu
0
≠
F
0
=
F
G
L
– ciężar lokomotywy,
G
– ciężar całego pociągu,
k
– współczynnik zależny od rodzaju pociągu:
k
= 40 dla ciężkich pociągów towarowych,
k
= 40 dla pociągów pasażerskich z wagonami 4-osiowymi,
k
= 30 dla długich zespołów trakcyjnych,
k
= 20 dla krótkich zespołów trakcyjnych,
k
= 20 dla samych lokomotyw elektrycznych,
k
= 15 dla samych wagonów motorowych,
k
= 10 dla pociągów towarowych próżnych z wagonami otwartymi.
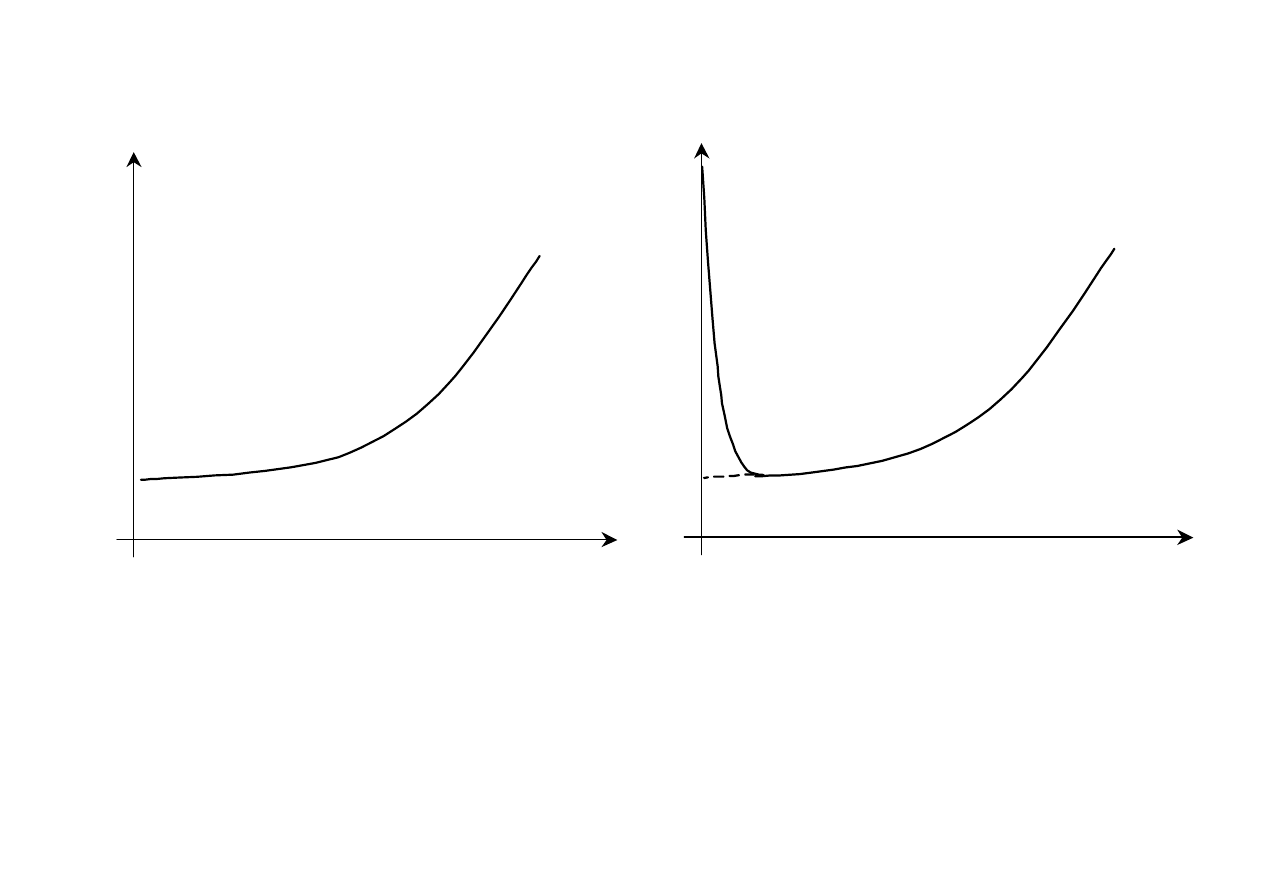
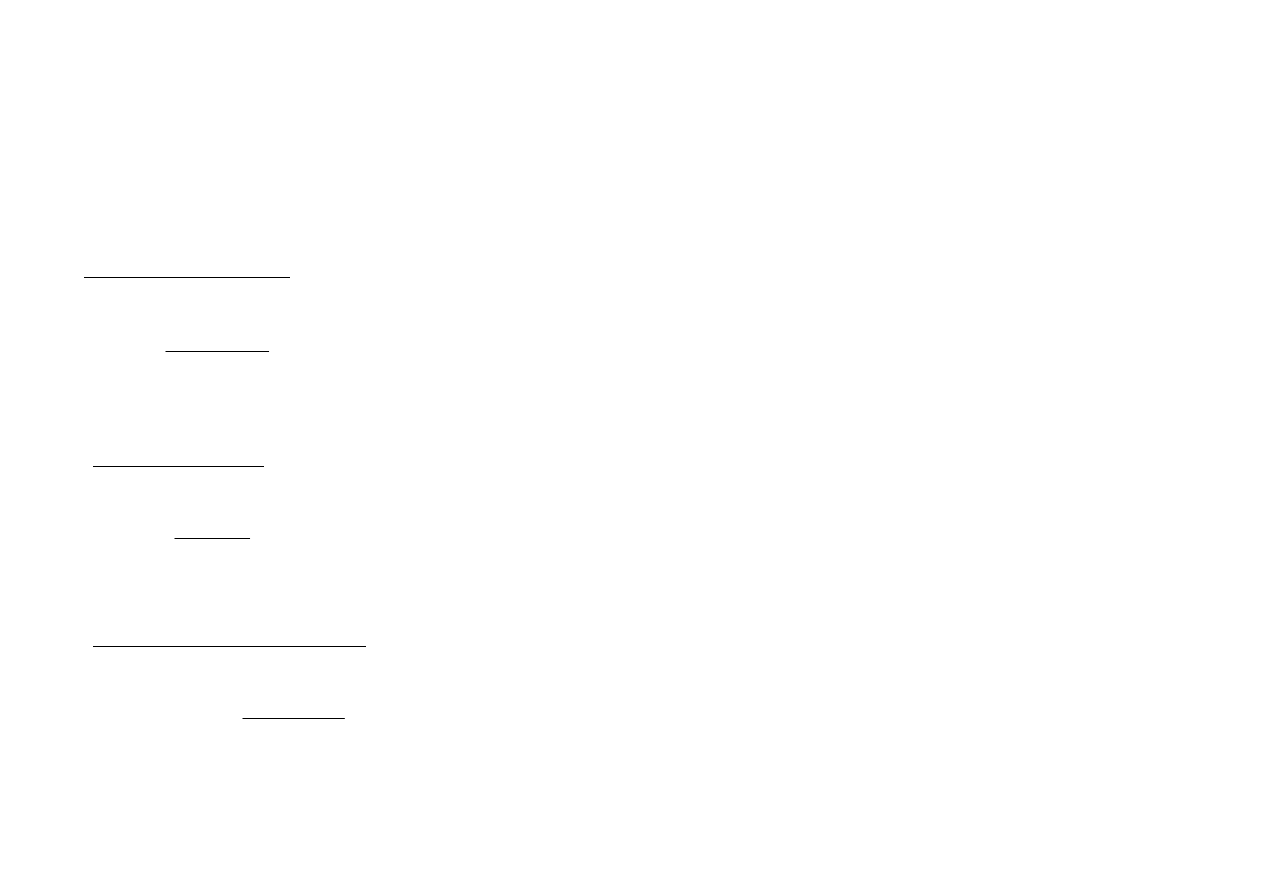
v
w
v
w
Jednostkowe opory ruchu w funkcji prędkości pociągu
Opory profilu linii
Opory te dotyczą pionowego i poziomego profilu linii. Na wzniesieniach i na łukach
pojawiają się opory dodatkowe, które dodają się do oporów zasadniczych.
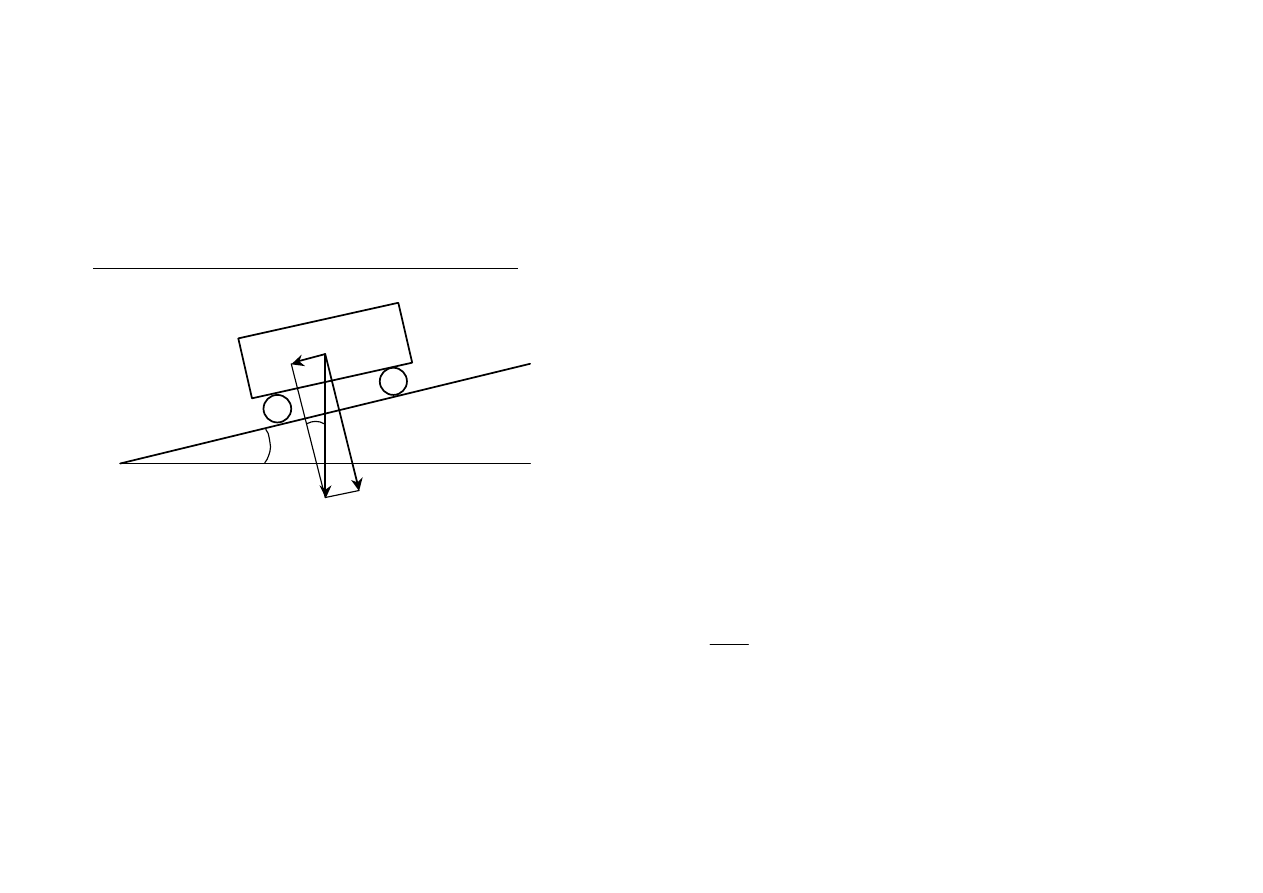
Opory na wzniesieniach i spadkach.
α
α
G
Rozkład ciężaru pociągu stojącego na
wzniesieniu
Jeżeli ciężar pociągu G wyrażony jest w
[kN], dodatkowy opór na wzniesieniu w [N]
będzie wynosił:
α
sin
1000
⋅
⋅
=
G
W
i
Kąt nachylenia toru określa się zwykle
w tysięcznych częściach jako stosunek
wysokości wzniesienia w [m] do jego
długości w [km] i oznacza i [
0
/
00
].
sin α ≈ tg α
i
G
W
i
⋅
=
i
G
W
w
i
i
=
=
[N]
[
0
/
00
]
Przy wzniesieniach wartość oporu dodaje
się do oporów zasadniczych, przy spadkach
– odejmuje.
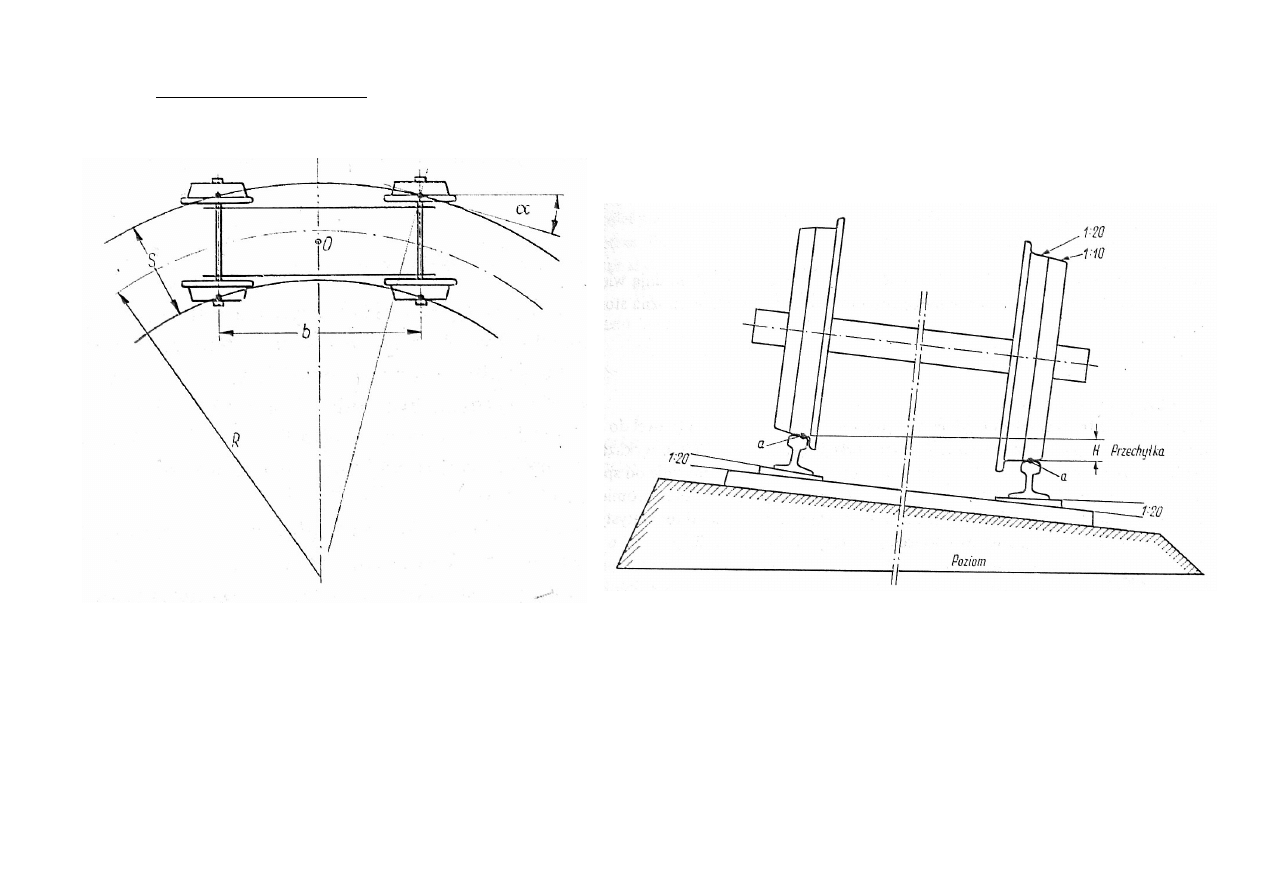
Opory krzywizny
Wózek na łuku
Układ kół pojazdu i szyn na łuku
Opory krzywizn oblicza się zwykle według różnych wzorów empirycznych.
Najbardziej rozpowszechnione są wzory Rőckla, określające jednostkowe opory w
zależności od promienia łuku R:
m
R
350
〉
m
R
350
250
〈
〈
m
R
250
〈
55
650
−
=
R
w
k
35
530
−
=
R
w
k
30
500
−
=
R
w
k
Wzory te dają niezgodne wyniki przy wartościach granicznych promienia łuku R.
Stosować można wzór ogólny w postaci:
20
700
−
=
R
w
k
[N/kN]
Opory dodatkowe ośrodka
Opory wiatru
Wpływu wiatru na opory ruchu nie da się uwzględnić zgodnie z rzeczywistością,
ponieważ ma on zmienną siłę i kierunek działania. Wpływu tego nie uwzględnia się
wcale lub na trasach, na których spotyka się silne wiatry, zakłada się, że prędkość
pociągu przyjmowana do obliczania zasadniczych oporów ruchu jest o 10 do 15 km/h
większa od rzeczywistej.
Opory w tunelach
2
10
1
50
−
⋅
=
v
q
L
W
t
[N]
gdzie:
L – długość tunelu w [km], dla metra długość L przyjmuje się
jako odległość między dużymi i dobrze przewietrzanymi
stacjami,
q – stosunek przekroju tunelu do przekroju pociągu.
Całkowite opory ruchu
Całkowite opory ruchu są sumą oporów zasadniczych, oporów profilu linii i
ewentualnie oporów dodatkowych ośrodka
(
)
k
c
c
w
i
w
G
w
G
W
+
±
⋅
=
⋅
=
W[N], w[
0
/
00
], G[kN]
Przyczepność
M
G
F
Warunkiem uzyskania siły pociągowej na obwodzie
kół lokomotywy jest sczepienie koła z szyną.
Sczepienie
występuje,
jeżeli
ciężar
zestawu
kołowego wraz z przypadającym nań ciężarem
lokomotywy, czyli tzw. nacisk osi na szyny jest
wystarczająco duży.
Siła działająca na obwodzie koła nie może być zbyt duża, gdyż inaczej przekroczy
wytrzymałość powiązań koła z szyną, nastąpi zerwanie przyczepności, koło zamiast
toczyć się zacznie obracać się w miejscu i nastąpi poślizg.
Największa siła pociągowa, jaką może rozwijać koło napędne, występująca w punkcie
styku koła napędnego z szyną nosi nazwę siły przyczepności i stanowi iloczyn nacisku
osi napędnej na szynę i pewnego współczynnika zwanego współczynnikiem
przyczepności.

Prawidłowe toczenie koła wymaga w punkcie styczności koła napędnego z szyną
takiej siły pociągowej, która spełnia warunek:
n
G
f
F
⋅
≤
gdzie:
F – siła działająca na obwodzie koła,
f – współczynnik przyczepności,
G
n
= m g – ciężar części pojazdu przypadający na jedno koło oraz
ciężar tego koła (ciężar napędny).
Współczynnik przyczepności można zdefiniować jako stosunek siły pociągowej
wywołującej zerwanie przyczepności między kołem a szyną do ciężaru obciążającego
koło.
Wartość współczynnika przyczepności ma bardzo duże znaczenie, ponieważ od niej
zależy niezbędny minimalny ciężar lokomotywy, potrzebny do wywołania określonej
siły pociągowej.
Wartość współczynnika przyczepności zależy od wielu czynników, w szczególności
od rodzaju szyn i ich stanu (głównie czystości), od pogody i prędkości pociągu.
Wartość współczynnika przyczepności spada ze wzrostem prędkości. Można ją
powiększyć posypując szyny piaskiem.
Opisując zjawisko przyczepności określa się współczynnik przyczepności
całej lokomotywy f
L
.
Analityczne ujęcie wpływu wielu różnorodnych czynników na wartość f
L
nie jest możliwe.
Do obliczeń stosuje się przybliżone wzory empiryczne.
Wzór Parodi’ego
v
f
f
L
L
01
,
0
1
0
+
=
gdzie: f
L0
= 0,33 dla szyn suchych,
f
L0
= 0,27 dla szyn mokrych,
ś
rednio przyjmuje się f
L0
= 0,3.
Wzór Kothera
v
f
L
+
=
42
9
Jest to wzór dla szyn suchych.
Dla szyn mokrych należy wartość f
L
zmniejszyć
do krotności 0,85-0,75.
Wzór stosowany w PŁ
v
v
f
f
L
L
2
100
100
0
+
+
⋅
=
współczynnik f
L0
taki sam, jak we wzorze
Parodi’ego
Współczynnik przyczepności f
L
maleje ze wzrostem prędkości – rys.
Tak samo przebiega zależność siły przyczepności F
L
lokomotywy , ograniczającej
siłę pociągową lokomotywy, w funkcji prędkości v. We wzorze ciężar napędny
będzie równy ciężarowi całej lokomotywy, G
n
=G
L
, jeżeli wszystkie osie w
lokomotywie są napędne.
Aby nie dopuścić do poślizgu, przyjmuje się, że maksymalna siła pociągowa, jaką
lokomotywa może rozwijać wynosi 90% siły przyczepności.
v
f
L
f
L
(F
L
)
µ
Współczynnik przyczepności i współczynnik tarcia
w funkcji prędkości
n
L
L
G
f
F
⋅
=
L
F
F
⋅
=
9
,
0
Siła pociągowa lokomotywy, pochodząca z momentów obrotowych przyłożonych do kół
napędnych, musi pokonać opory ruchu samej lokomotywy i wagonów oraz nadać
lokomotywie i wagonom odpowiednie przyspieszenie. Jednocześnie, siła ta musi być
mniejsza od siły przyczepności.
L
L
p
G
f
W
F
F
⋅
≤
+
=
(
)
(
)
g
m
f
w
g
m
m
a
m
m
F
L
L
w
L
w
w
L
L
⋅
⋅
≤
⋅
⋅
+
+
⋅
+
=
α
α
(
)
(
)
g
m
f
w
g
m
m
a
m
m
L
L
w
L
w
w
L
L
⋅
⋅
=
⋅
⋅
+
+
⋅
+
max
α
α
α
α
α
⋅
⋅
−
⋅
=
+
⋅
⋅
+
−
⋅
⋅
=
m
G
w
G
f
m
m
w
g
m
m
g
m
f
a
L
L
w
w
L
L
w
L
L
L
)
(
max
g
m
f
w
g
m
a
m
L
⋅
⋅
≤
⋅
⋅
+
⋅
⋅
α
L
f
w
g
a
≤
+
⋅
α
(
)
α
g
w
f
a
L
−
=
max
Jeżeli pojazd lub pociąg ma
wszystkie osie napędne
W wyniku ograniczenia siły pociągowej lokomotywy, przede wszystkim względami
przyczepności, ograniczona zostaje wielkość przyspieszenia rozruchowego.
Możliwe do uzyskania przyspieszenie będzie większe, jeśli większy będzie ciężar napędny.
Konieczne jest zatem nadanie lokomotywom (również wagonom motorowym w zespołach
trakcyjnych) wystarczającego ciężaru napędnego, z czym związane jest odpowiednie
rozwiązanie konstrukcji podwozia lokomotywy.

W wyniku ograniczenia siły pociągowej lokomotywy, przede wszystkim względami
przyczepności, ograniczona zostaje wielkość przyspieszenia rozruchowego.
Przyjmując średnią siłę pociągową lokomotywy F o 10% niższą od maksymalnej,
wynikającej z warunków przyczepności, F=0,9 F
L
, otrzymuje się dla pociągów
prowadzonych lokomotywami 4-silnikowymi, następujące najwyższe wartości
przyspieszeń, przy prędkości 50 km/h:
dla pociągu towarowego o masie 1800 t
0,06 m/s
2
,
dla pociągu towarowego o masie 900 t
0,14 m/s
2
.
Dla zespołu trakcyjnego 3-wagonowego o masie 155 t
0,6 m/s
2
.
Względy ograniczające siłę pociągową, przede wszystkim przyczepność,
powodują również ograniczenie masy pociągu.
L
L
p
G
f
W
F
⋅
≤
+
L
L
G
f
w
a
g
G
⋅
≤
+
α
w
a
g
G
f
G
L
L
+
⋅
≤
α
lub
w
a
g
m
f
m
L
L
+
⋅
≤
α
Maksymalna masa pociągu jest wprost proporcjonalna do masy lokomotywy i
współczynnika przyczepności, zależy od jednostkowych oporów ruchu i
przyspieszenia pociągu. Zatem maksymalna masa pociągu będzie inna dla każdego
typu lokomotywy i profilu trasy.

Siła pociągowa na obwodzie kół lokomotywy jest to siła F
h
rozwijana „na haku”
(sprzęgu), czyli siła, z jaką lokomotywa ciągnie wagony, pomniejszona o siłę
pociągową samej lokomotywy, stanowiącą sumę oporów ruchu lokomotywy i siły
nadającej lokomotywie przyspieszenie.
g
a
G
w
G
F
F
F
F
L
L
L
L
lok
h
⋅
⋅
−
⋅
−
=
−
=
α
Wytrzymałość sprzęgów jest ściśle ograniczona i siła na haku F
h
nie może być
dowolnie duża. Tak więc i sama siła pociągowa F (na obwodzie kół napędnych) jest,
prócz przyczepności, ograniczona wytrzymałością sprzęgów wagonowych.
Wyszukiwarka
Podobne podstrony:
Wykład 4 Teoria ruchu pojazdów szynowych
Projekt teoria ruchu pojazdów Skoda Octavia
TEORIA RUCHU POJAZDÓW-program, MiBM Politechnika Poznańska, Semestr V
kolos 2, TR-pytania-2, TEORIA RUCHU POJAZDÓW SAMOCHODOWYCH
Teoria Ruchu Pojazdów wezykowanie
teoria ruchu pojazdow 1 2
ProjektRAV--A K, Studia PWR Tranposrt Mechaniczny Politechnika Wrocławska, SEMESTR V, Teoria Ruchu P
Pojazdy pytania-2, TEORIA RUCHU POJAZDÓW SAMOCHODOWYCH
teoria ruchu pojazdow 1 2
kółka, Studia PWR Tranposrt Mechaniczny Politechnika Wrocławska, SEMESTR V, Teoria Ruchu Pojazdów
TEORIA RUCHU POJAZDÓW
Microsoft PowerPoint Wykład 3 Struktura układu zasilania
Teoria ruchu potoków pojazdów(1)
Teoria ruchu potoków pojazdów 3
(Microsoft PowerPoint metodyka ruchu 2
(Microsoft PowerPoint metodyka ruchu 3
Nowy Prezentacja programu Microsoft PowerPoint 5
Rola rynku i instytucji finansowych INowy Prezentacja programu Microsoft PowerPoint
więcej podobnych podstron