PODSTAWY
AUTOMATYKI
IX. TRANSMITANCJE ZASTĘPCZE I CHARAKTERYSTYKI
UKŁADÓW AUTOMATYCZNEJ REGULACJI
Ćwiczenie nr 9
Rzeszów 2005
BADANIE UKŁADÓW POŁĄCZONYCH SZEREGOWO,
RÓWNOLEGLE I ZE SPRZĘŻENIEM ZWROTNYM
Zakład Badań Konstrukcji
Podstawy Automatyki
I. Wprowadzenie
Podstawowym elementem układów automatycznej regulacji są człony.
Każdy z tych elementów można rozpatrywać samodzielnie.
W członach sygnał przekazywany może być tylko w jednym kierunku.
Wielkością charakteryzującą człony jest transmitancja zastępcza, czyli stosunek
bezwymiarowych transformat wyjścia do wejścia wyrażająca się
w postaci wzoru:
)
(
)
(
)
(
S
X
S
Y
S
G
=
;
gdzie:
G(S) – transmitancja zastępcza członu;
Y(S) – transformata wyjścia;
X(S) – transformata wejścia.
Ze względu na właściwości dynamiczne w układach automatycznej
regulacji można wyróżnić kilka podstawowych elementów:
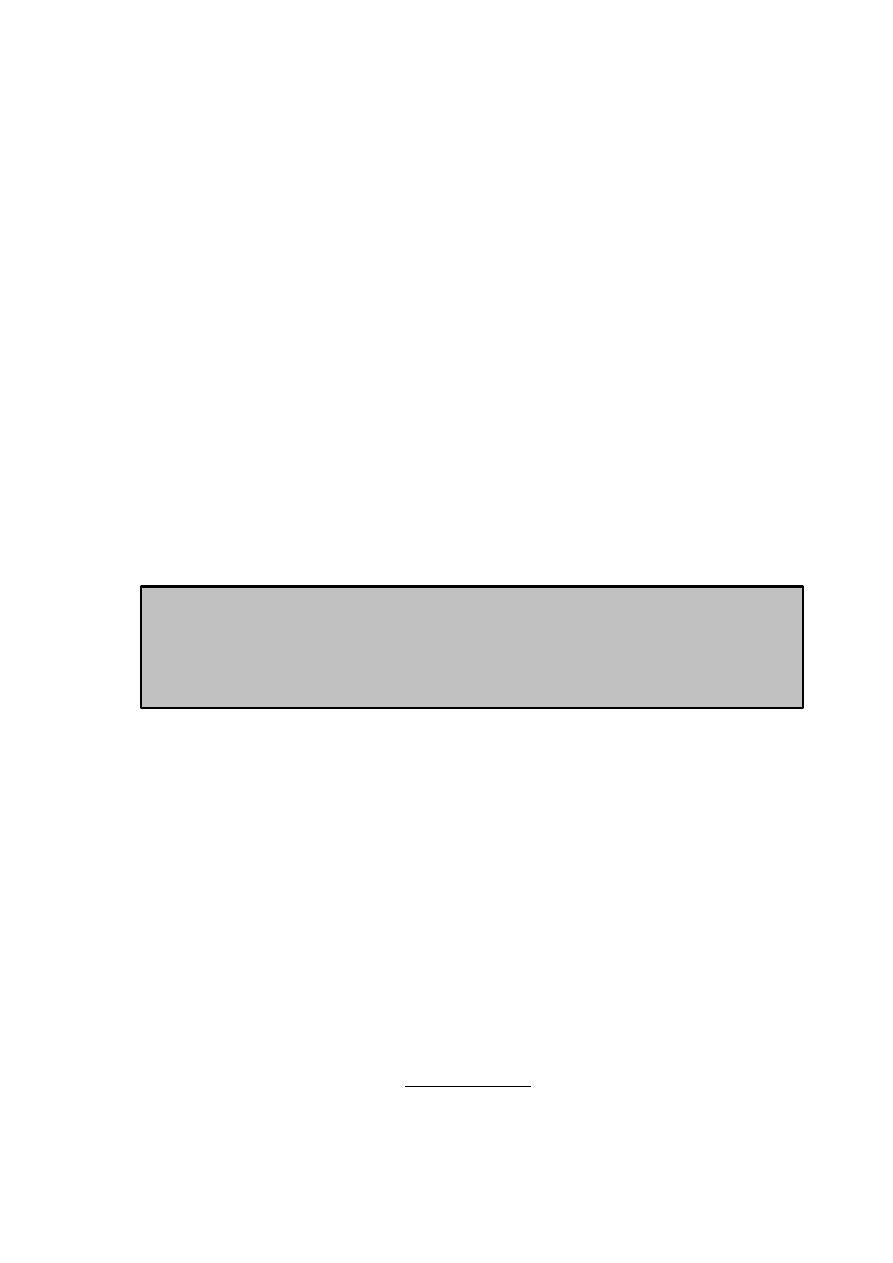
a) człon proporcjonalny – „P”
G(S)
t
X
X(S)
t
Y(S)
Y
k
S
G
=
)
(
;
gdzie:
k – współczynnik wzmocnienia;
- 2 -
WYJŚCIE
Y(S)
G(S)
WEJŚCIE
X(S)
Zakład Badań Konstrukcji
Podstawy Automatyki
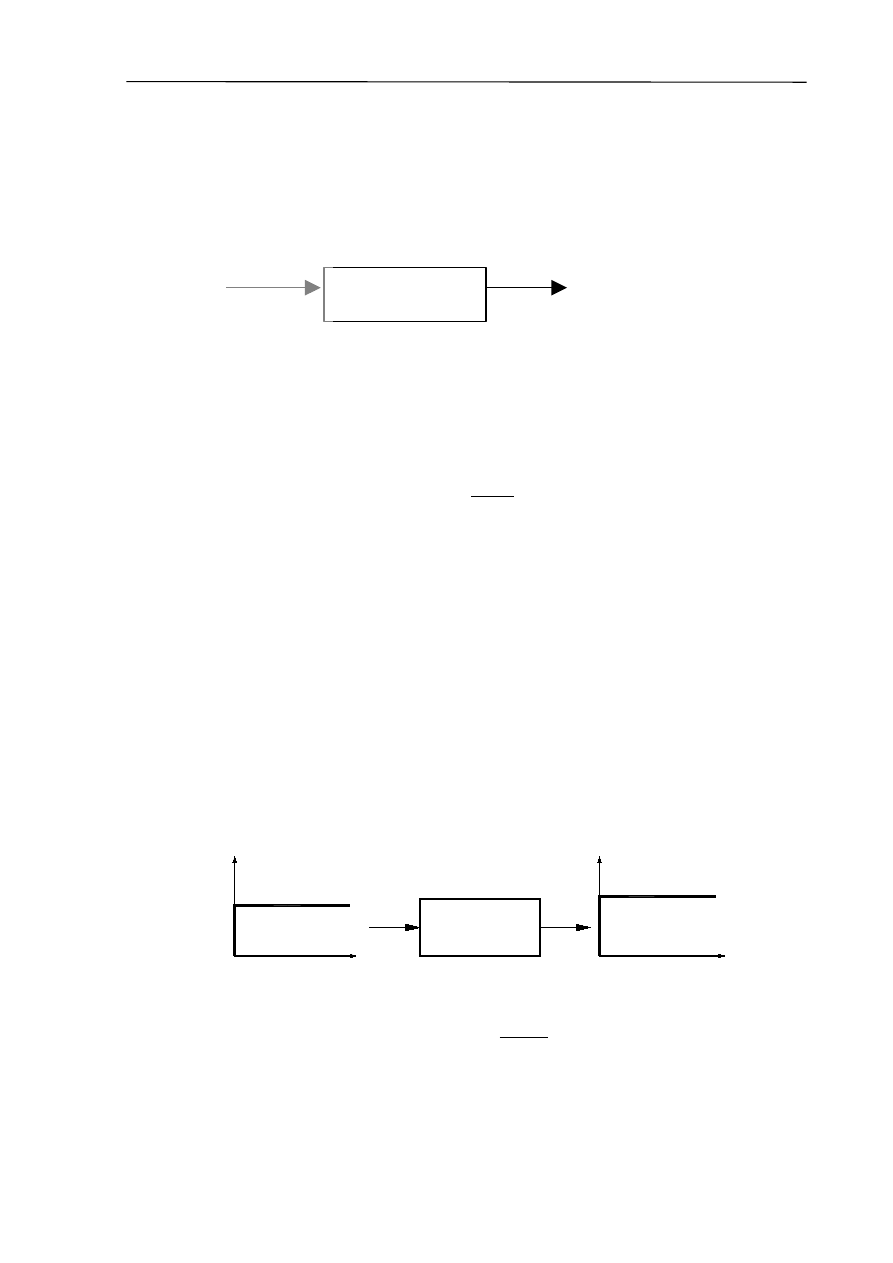
b) człon całkujący – „I”
G(S)
t
X
X(S)
T
t
Y(S)
Y
S
k
S
G
=
)
(
;
gdzie:
k – współczynnik wzmocnienia;
T – czas całkowania;
S – zmienna zespolona;
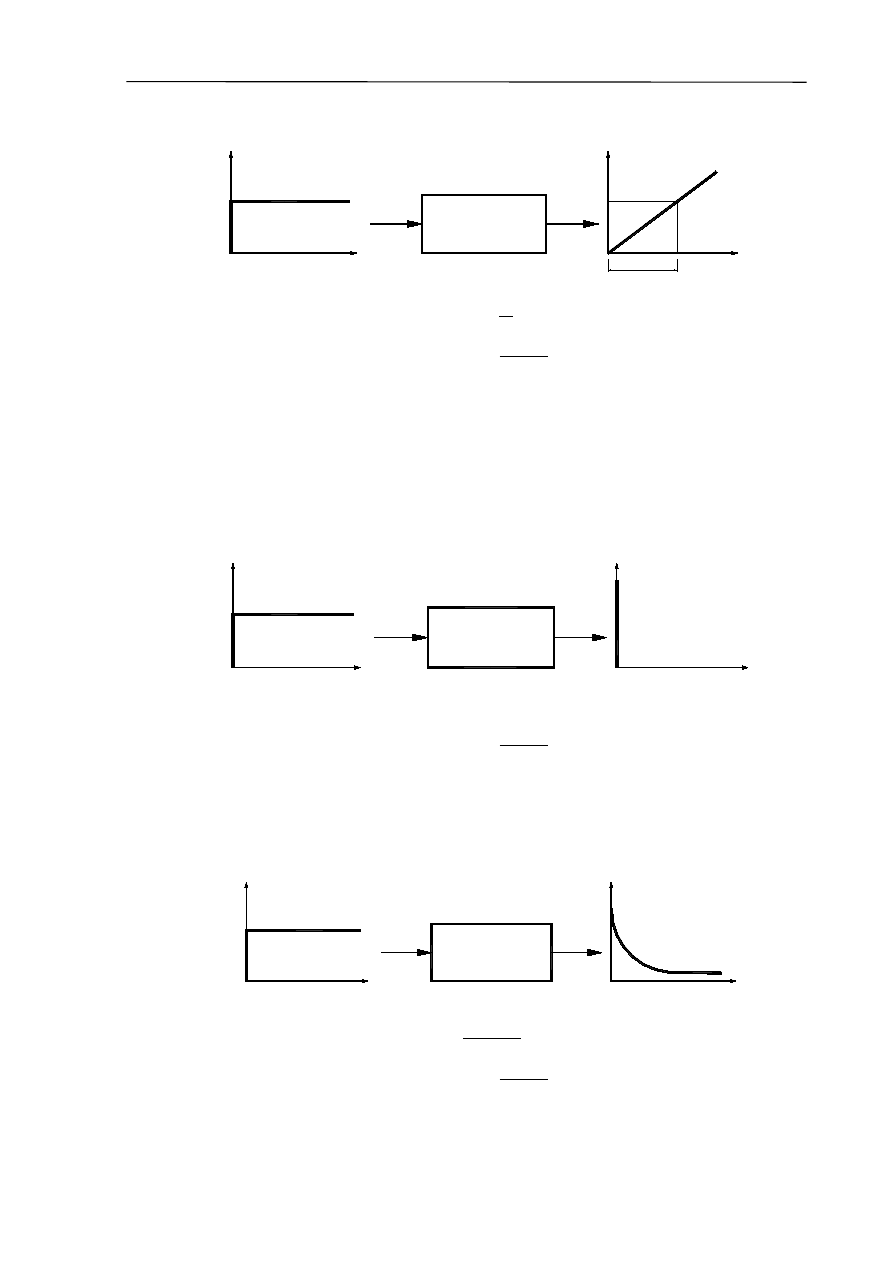
c) człon różniczkujący – „D”
- różniczkujący idealny
t
X
X(S)
t
G(S)
Y(S)
Y
;
)
(
S
k
S
G
⋅
=
gdzie:
k – współczynnik wzmocnienia;
S – zmienna zespolona;
- różniczkujący rzeczywisty
G(S)
t
X
X(S)
t
Y
Y(S)
1
)
(
+
⋅
⋅
=
S
T
S
k
S
G
;
gdzie:
k – współczynnik wzmocnienia;
T – stała czasowa;
S – zmienna zespolona;
- 3 -
Zakład Badań Konstrukcji
Podstawy Automatyki
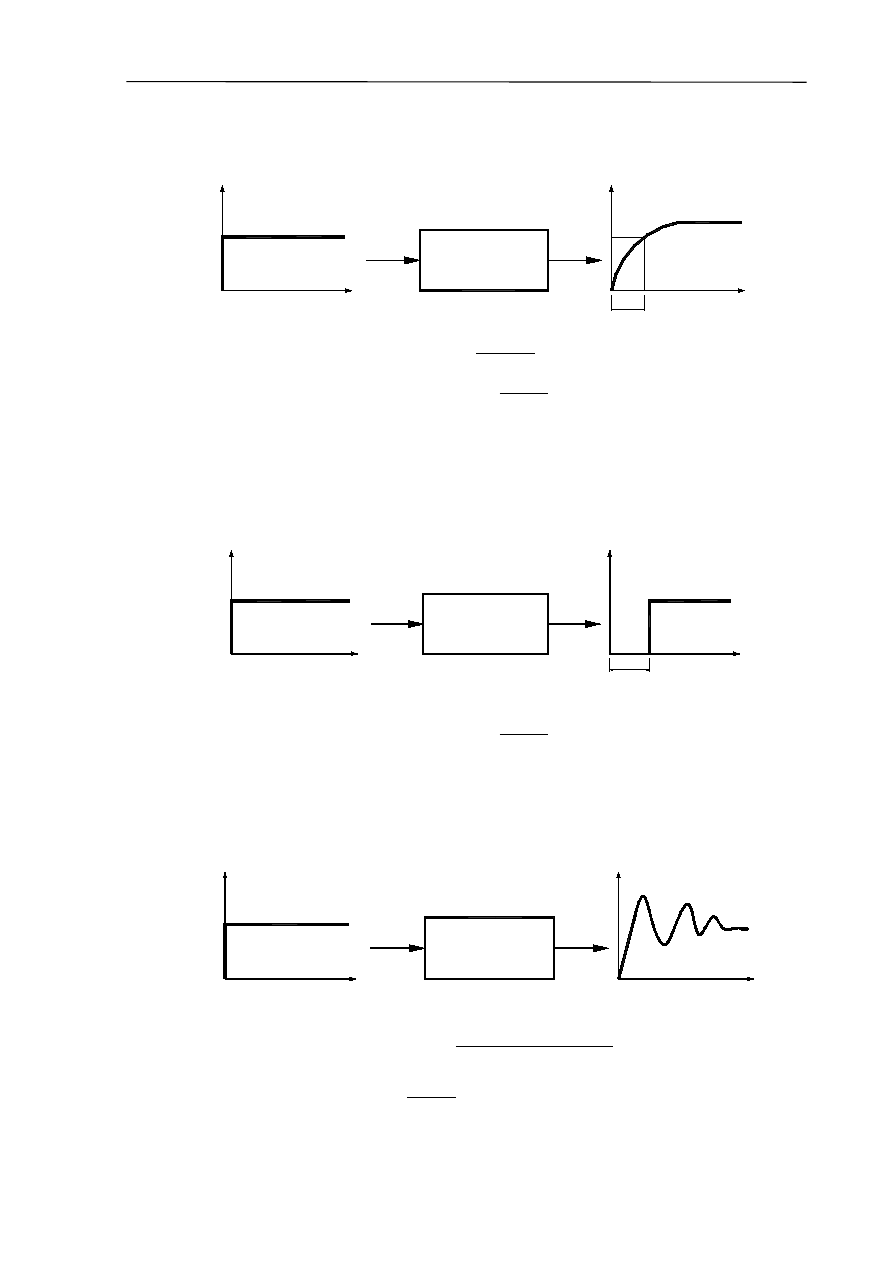
d) człon inercyjny
G(S)
t
X
X(S)
T
t
Y(S)
Y
1
)
(
+
⋅
=
S
T
k
S
G
;
gdzie:
k – współczynnik wzmocnienia;
T – stała czasowa;
S – zmienna zespolona;
e) człon opóźniający
G(S)
t
X
t
t
Y
X(S)
Y(S)
S
t
e
S
G
⋅
−
=
)
(
gdzie:
t – czas opóźnienia;
S – zmienna zespolona;
f) człon oscylacyjny
t
X
t
Y
X(S)
G(S)
Y(S)
;
1
)
(
2
2
2
1
+
⋅
+
⋅
=
S
T
S
T
k
S
G
gdzie:
k – współczynnik wzmocnienia;
T
1,
T
2
– stałe czasowe; S – zmienna zespolona;
- 4 -
Zakład Badań Konstrukcji
Podstawy Automatyki
POŁĄCZENIA UKŁADÓW
Układ regulacji stanowić mogą oddzielne człony lub ich połączenia.
Wyróżnić można dwie główne struktury połączeń:
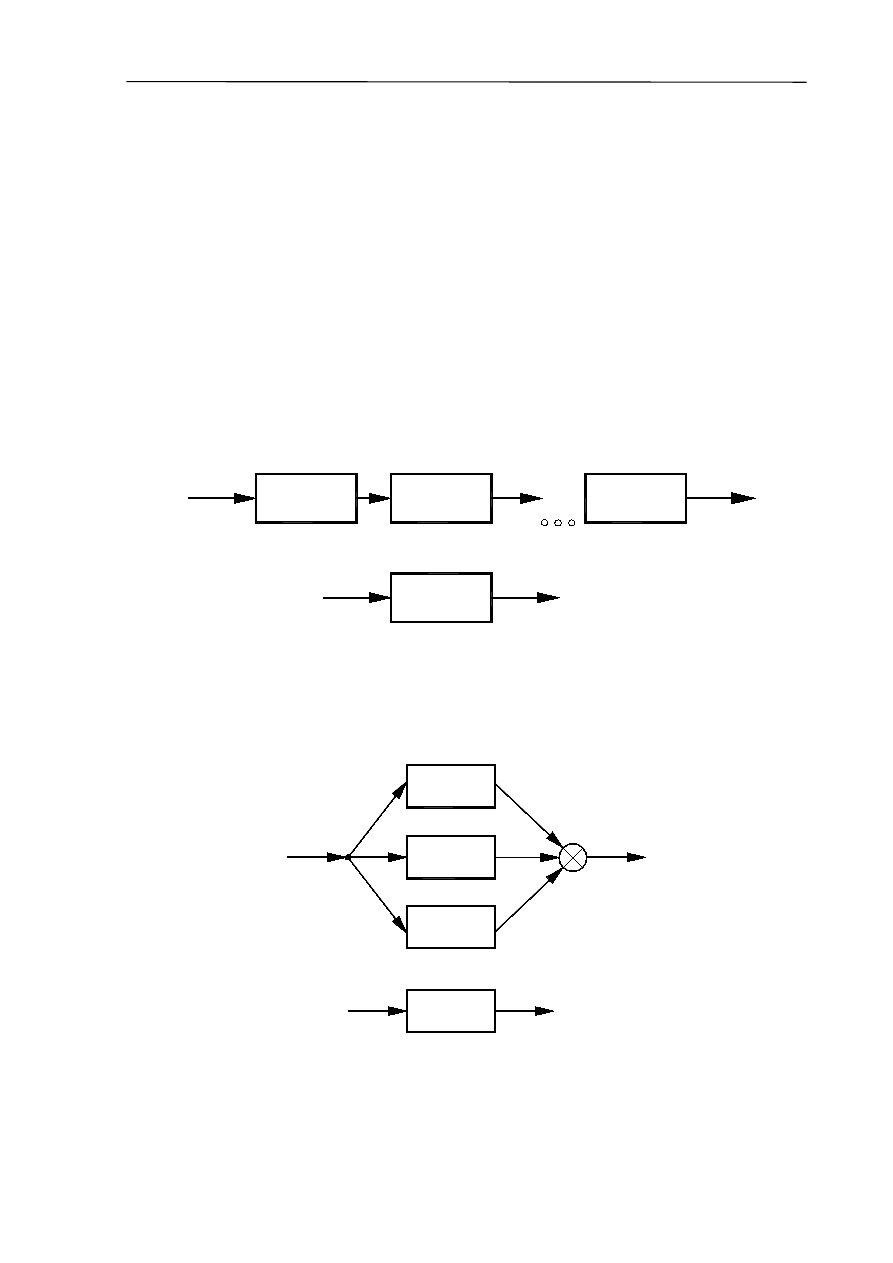
a) układ otwarty – taki w którym sygnał przekazywany jest tylko w jednym
kierunku, a jego wartość wyjściowa nie ma wpływu na pracę układu.
W otwartych układach regulacji istnieją dwa sposoby połączeń
elementów automatyki.
- połączenie szeregowe
X
X
G
1
(S)
U
1
G(S)
Y
G
2
(S)
U
2
G
n
(S)
Y
Transmitancja zastępcza układu połączonego szeregowo:
)
(
...
)
(
)
(
)
(
2
1
S
G
S
G
S
G
S
G
n
⋅
⋅
⋅
=
- połączenie równoległe
G
1
(S)
G
2
(S)
X
X
X
X
X
G(S)
Y
G
n
(S)
U
n
U
2
U
1
Y
Transmitancja zastępcza układu połączonego równolegle:
)
(
...
)
(
)
(
)
(
2
1
S
G
S
G
S
G
S
G
n
+
+
+
=
- 5 -
Zakład Badań Konstrukcji
Podstawy Automatyki
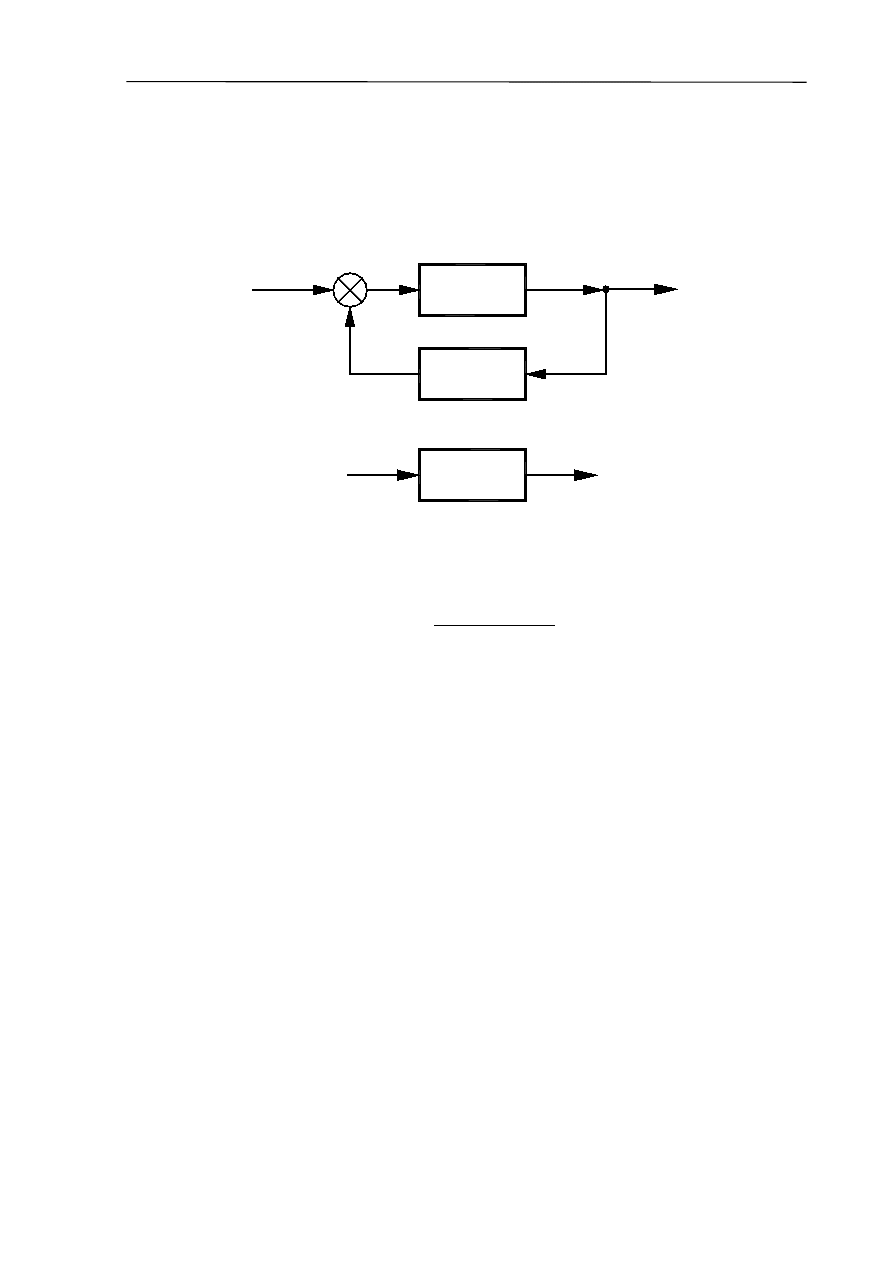
b) układ zamknięty – układ regulacji – układ ze sprzężeniem zwrotnym.
Sygnał wyjściowy jest zawracany i poprzez porównanie z wartością
zadaną reguluje pracą układu.
G
1
(S)
Z
X
X±Z
Y
G
2
(S)
Y
Y
X
G(S)
Y
Transmitancja zastępcza układu ze sprzężeniem zwrotnym:
)
(
)
(
1
)
(
)
(
2
1
1
S
G
S
G
S
G
S
G
⋅
±
=
REGULATORY
Regulator - [łac.] urządzenie sterujące, które stosownie do różnicy wartości
między wielkościami zadanymi a mierzonymi tak oddziałuje na
obiekt sterowania (regulacji) za pomocą wielkości sterujących, aby
wielkości regulowane miały pożądane wartości.
Ze względu na własności dynamiczne regulatory można podzielić na :
a)
PROPORCJONALNY „P” – posiada właściwości członu
proporcjonalnego.
b)
CAŁKUJĄCY „I” – posiada właściwości członu całkującego.
c)
RÓŻNICZKUJĄCY „D” – posiada właściwości członu różniczkującego.
- 6 -
Zakład Badań Konstrukcji
Podstawy Automatyki
d) PROPORCJONALNO – CAŁKUJĄCY „PI”
t
X
X
Y
PI
Y
t
Tc
T
c
– czas całkowania;
e) PROPORCJONALNO – RÓŻNICZKUJĄCY „PD”
t
X
X
Y
PD
Y
t
Tr
T
r
– czas różniczkowania;
f) PROPORCJONALNO – CAŁKUJĄCO – RÓŻNICZKUJĄCY „PID”
t
X
X
Tc
PID
Y
Y
t
Tr
T
c
– czas całkowania;
T
r
– czas różniczkowania;
- 7 -

Zakład Badań Konstrukcji
Podstawy Automatyki
II. WYKONANIE ĆWICZENIA
1. Człony autoamtyki
Aby uruchomić program należy otworzyć umieszczone na pulpicie
komputera pliki o nazwie: „Człony automatyki”. Jest to plik typu Excel.
Program otworzy się na stronie początkowej, umożliwiającej wybór
badanego członu. Spośród siedmiu dostępnych możliwości interesować nas
będą trzy podstawowe: człon proporcjonalny P, całkujący I, oraz różniczkujący
rzeczywisty D. W celu przeanalizowania charakterystyki członu należy nacisnąć
klawisz z nazwą interesującego nas członu, pozwoli to na ukazanie się planszy
z odpowiednią charakterystyką. Każdy człon przedstawiony jest wzorem
opisującym jego transmitancję zastępczą, widocznym w lewym górnym
fragmencie ekranu, pod nazwą członu. W zależności od jego postaci wykres
charakterystyki członu uzależniony jest od następujących parametrów:
k – współczynnik wzmocnienia;
T – stała czasowa;
t
o
– czas opóźnienia.
W prawym górnym rogu ekranu znajdują się suwaki umożliwiające
zmianę wielkości parametrów, jednocześnie widoczna jest zmiana przebiegu
charakterystyki.
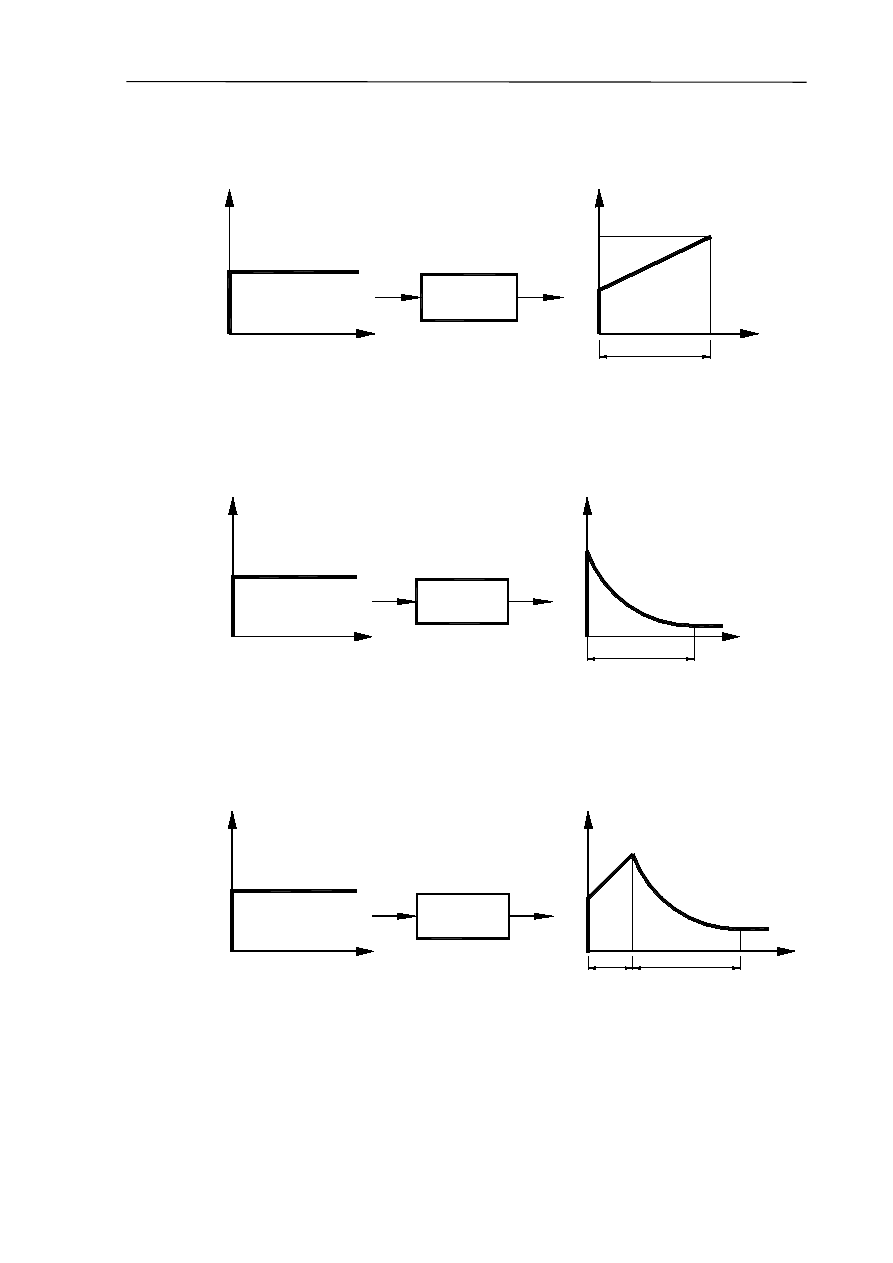
a) Człon proporcjonalny P:
Ustawić suwakiem dowolną wartość współczynnika k, a następnie
zapisać wykres wg poniższej procedury. Powtórzyć czynność jeszcze dwa razy
za każdym razem ustawiając inne wartości parametru „k”. Poprzez naciśnięcie
przycisku „POWRÓT NA START” powrócić do strony początkowej.
- 8 -

Zakład Badań Konstrukcji
Podstawy Automatyki
Zapisywanie wykresu:
Aby zapisać aktualny stan wykresu należy nacisnąć przycisk skrótu
„Crtl + c” lub z menu „Edycja” wybrać polecenie „kopiuj”. Następnie otworzyć
utworzony na pulpicie plik Word’a. W tym pliku wybrać z menu górnego
„Edycja” polecenie „Wklej specjalne”, oraz w ukazanym okienku zaznaczyć
„Rysunek”, i potwierdzić wybór naciskając przycisk „OK.”
Operacja ta pozwoli na wklejenie wykresu nie zajmując zbyt dużej pamięci na
dysku.
Po pojawieniu się wykresu ustawić kursor poniżej obrazu. Wrócić do
programu Excel nie zamykając pliku.
b) Człon różniczkujący rzeczywisty D:
Człon ten zależy zarówno od parametru „k” jak i „T”. Ustawić suwakiem
dowolną wartość parametru „T”, a następnie dowolną wartość współczynnika
„k”. Zapisać obraz wg powyższej procedury. Następnie zmienić wartość „k”, po
czym zapisać obraz. Kolejno zmienić wartość stałej czasowej „T” i ustawić
poprzednie wartości współczynników „k”, każdorazowo zapisując wykres.
Zaobserwować zmiany wykresu od zadanych wartości parametrów. Powrócić do
strony początkowej.
c) Człon całkujący I:
Postać charakterystyki tego członu zależy od stałej wzmocnienia, a także
czasu całkowania – zaznaczonego cienką, zieloną pionową linią na wykresie.
Ponieważ jest to charakterystyka wyjścia, istotne jest podanie wartości
wejściowej „x”. Za pomocą suwaka ustawić dowolną wartość współczynnika
„k”, a następnie dwie dowolne, różne od siebie wartości wejściowe „x”.
Następnie zmienić wartość wsp. „k” i ustawić poprzednie wartości wejściowe.
Za każdym razem zapisać obraz. We wnioskach opisać zależność wykresu od
- 9 -

Zakład Badań Konstrukcji
Podstawy Automatyki
wartości wejściowej i współczynnika „k”, a także zachowanie stałej czasowej
przy zmianie parametrów.
Godne uwagi jest prześledzenie wszystkich dostępnych członów, nie
wymaga to jednak zapisywania wykresów na dyskietkę i umieszczania ich
w sprawozdaniu.
2. Połączenia elementów.
W celu przejścia do dalszej części ćwiczenia należy zamknąć program
(naciskając przycisk w dolnym rogu ekranu), a następnie otworzyć plik
”Połączenia i regulatory” umieszczony na pulpicie. Program otwiera się na
planszy startowej umożliwiającej wybór połączenia dwóch elementów.
a) Połączenie szeregowe
Układ składa się z dwóch elementów połączonych szeregowo. Wybór
elementów należy do Was i odbywa się poprzez zatwierdzenie z menu
rozwijalnego umieszczonego w lewej części ekranu, nazwy członu oddzielnie
dla G1 i G2. Po wybraniu elementów na ekranie pokazują się ich transmitancję
zastępcze oraz symbole graficzne.
Do prawidłowego przeprowadzenia ćwiczenia należy wprowadzić
niezbędne dane poprzez naciśnięcie przycisku opatrzonego napisem „wprowadź
dane”, umiejscowionego pod menu rozwijalnymi, w lewej części ekranu.
Pojawia się okienko, do którego należy wprowadzić własne wartości,
a następnie zatwierdzić przyciskiem „OK.” Pod tabelą danych umieszczona jest
ramka „Wynik”, znajdująca się w niej wartość jest liczbową wartością
transmitancji zastępczej wybranego układu. Natomiast wzór transmitancji tego
układu wyświetlany jest w dolnej części ekranu.
Aby zobaczyć charakterystykę danego połączenia należy nacisnąć przycisk
„WYŚWIETL WYKRES” znajdujący się w lewym dolnym rogu ekranu.
- 10 -

Zakład Badań Konstrukcji
Podstawy Automatyki
Podobnie jak w pierwszej części ćwiczenia wielkość parametrów, od których
zależna jest charakterystyka można regulować za pomocą suwaków.
Przycisk „POWRÓT” poniżej wykresu umożliwia powrót do planszy, na której
dokonuje się wyboru członów, natomiast do planszy startowej przechodzimy za
pomocą przycisku „POWRÓT NA START”.
Ćwiczenie polega na wybraniu dowolnych członów połączonych
szeregowo, wprowadzeniu dowolnych danych oraz wyliczeniu dla nich
transmitancji zastępczej, a następnie zbadaniu charakterystyki (jak w pierwszej
części ćwiczenia).
b) Połączenie równoległe
Zasada działania jest podobna jak w przypadku połączeń szeregowych.
Ćwiczenie polega na dowolnym ustawieniu członów układu, zadania im
dowolnych wartości, a następnie zbadaniu otrzymanej charakterystyki,
zapisując jej obraz na dyskietkę.
c) Połączenie za sprzężeniem zwrotnym
Podobnie jak w poprzednich przypadkach należy wybrać człony G1 i G2,
zadać im dowolne wartości, zbadać charakterystyki, oraz zapisać ich obraz.
d) Regulatory
Celem tego ćwiczenia jest przebadanie własności regulatorów PI, PD oraz
PID. Ustawienie regulatora odbywa się poprzez wybór z menu rozwijalnego
odpowiedniej pozycji.
Podobnie jak w przypadku poprzednich ćwiczeń dane wprowadzane są
dowolnymi wartościami. Po ich zadaniu przechodzimy do charakterystyki
regulatora za pomocą przycisku „WYŚWIETL WYKRES”, a następnie badamy
jego charakterystykę. Ustawiamy za pomocą suwaka wartość stałej „k” i dwie
- 11 -

Zakład Badań Konstrukcji
Podstawy Automatyki
różne wartości „T”, następnie zmieniamy „k” i dla poprzednich wartości „T”
badamy przebieg charakterystyki. Za każdym razem należy zapisać wykres.
W sprawozdaniu należy umieścić zapisane wykresy (wyniki ćwiczenia),
a także opisać zaobserwowane zależności charakterystyk członów i układów od
poszczególnych parametrów.
- 12 -
Document Outline
- PODSTAWY
- AUTOMATYKI
- Ćwiczenie nr 9
- Wielkością charakteryzującą człony jest transmitancja zastępcza, czyli stosunek bezwymiarowych transformat wyjścia do wejścia wyrażająca się w postaci wzoru:
- POŁĄCZENIA UKŁADÓW
- REGULATORY
- II. WYKONANIE ĆWICZENIA
Wyszukiwarka
Podobne podstrony:
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
transmit widmowa i charakt cz stotl(1), automatyka i robotyka, automatyka
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
Automatyczna regulacja zasięgu reflektorów przegląd podzespołów
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Laboratorium automatyki Regulacja impulsowa
Komputer w układzie automatycznej regulacji (2)
Podstawy automatyki (w 3) regula id 366722
37 Montowanie i testowanie połączeń układów automatyki
Wykład 6 Stabilność liniowych układów automatyki (2013)
Stabilność układów automatyki
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
obliczanie transmitacji zastepczej ukladu
01 Wprowadzenie do układów automatycznego sterowania
więcej podobnych podstron