
ŁAŃCUCH
BIOKINEMATYCZNY
OTWARTY I
ZAMKNIĘTY
ZAMKNIĘTY
(
definicja, znaczenie, om
ó
wienie na
wybranych przykładach
)

Pojęcie łańcucha kinematycznego wprowadził w 1875 roku
tw
ó
rca wsp
ó
łczesnej kinematyki maszyn, Franciszek
Reuleux opisał go, że łańcuch kinematyczny jest zwykle
zamkniętym systemem ogniw połączonych razem w taki
spos
ó
b, że ruch jednego ogniwa przy ustabilizowaniu
innego powoduje ruch pozostałych ogniw w
przewidywalny spos
ó
b.
Natomiast pojęcie łańcucha kinematycznego wprowadził
Natomiast pojęcie łańcucha kinematycznego wprowadził
do kinezjologii człowieka Steindler w 1955 roku. Według
niego łańcuch kinematyczny
–
to kombinacja kilku kolejno
rozmieszczonych staw
ó
w stanowiących kompleksowy
układ ruchowy. Podzielił on łańcuchy kinematyczne na
otwarte i zamknięte. To sp
ó
jny zesp
ó
ł człon
ó
w
połączonych w pary biokinematyczne.
Trochę biomechaniki
•
Para kinematyczna
–
to ruchome połączenie
dw
ó
ch lub więcej człon
ó
w wzajemnie
ograniczających ich ruchy względne.
•
Człon
- to sztywny element ciała ludzkiego w
postaci kości
•
Ruchliwość łańcucha kinematycznego
- to
określona liczba stopni swobody tego łańcucha
względem podstawy, kt
ó
rą jest człon stanowiący
nieruchomy układ odniesienia np. dla kończyny
dolnej
–
miednica; a dla kończyny g
ó
rnej
–
łopatka.
łopatka.
•
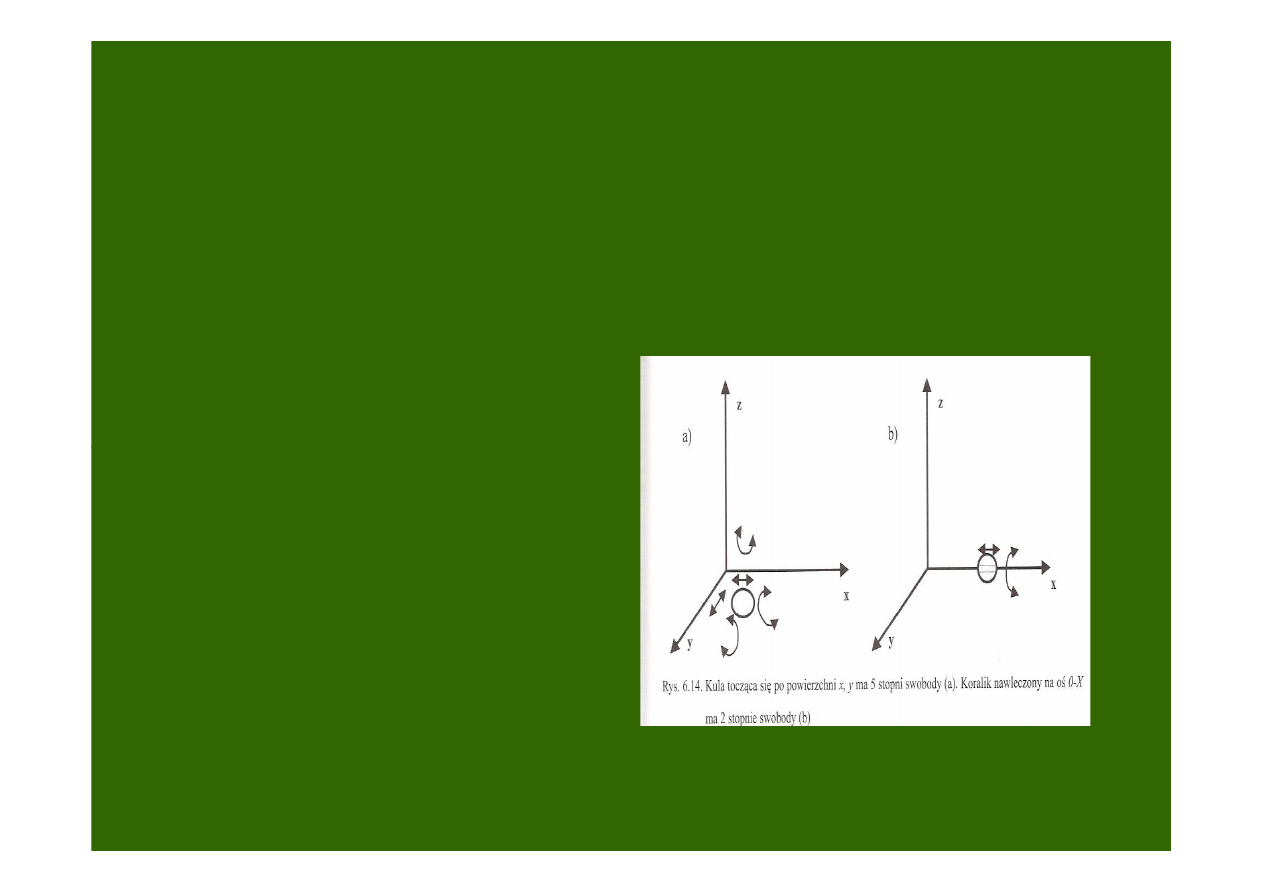
Liczba stopni swobody ciała sztywnego
-
nazywamy liczbę niezależnych wsp
ó
łrzędnych
określających jednoznacznie jego położenie w
przestrzeni względem wybranego układu
odniesienia. Swobodny człon zawieszony w
przestrzeni posiada 6 stopni swobody ruchu :
trzy ruchu postępowego wzdłuż osi x,y,z i trzy
ruchu obrotowego względem też osi x,y,z.
•
Stopień swobody
–
to niezależny ruch względem
człon
ó
w w stawie.

Człowiek posiada stawy o
maksymalnie trzech stopniach
swobody ruchu, np. staw
ramienny lub biodrowy, gdzie
kość ramienna, czy udowa
łączy się z panewką w jednym
końcu.

Budowa łańcuchów stawowych
kończyny górnej i dolnej
charakteryzuje się tym, że
stawy o dużej ruchomości są
stawy o dużej ruchomości są
oddzielone od siebie ogniwami
stawowymi o ruchomości
ograniczonej. I tak np.:
Staw ramienny -
3
°
swobody ruchu
Staw łokciowy -
1
°
swobody ruchu
Staw promieniowo-łokciowy -
1
°
swobody ruchu
Stawy nadgarstka -
2
°
swobody ruchu
Staw śródręczno-paliczkowy kciuka -
2
°
swobody ruchu
Stawy śródręczno-paliczkowe palców II-V -
2
°
swobody ruchu
Staw międzypaliczkowy kciuka -
1
°
swobody ruchu
Stawy międzypaliczkowe palców II-V-
1
°
swobody ruchu
Kończyna dolna
Staw biodrowy
- 3
°
swobody ruchu
Staw biodrowy
- 3
°
swobody ruchu
Staw kolanowy -
2
°
swobody ruchu
Staw skokowo-goleniowy -
1
°
swobody ruchu
Staw skokowo-piętowy -
1
°
swobody ruchu
Staw skokowo-sześcienny -
1
°
swobody ruchu
Staw skokowo-łódkowaty -
1
°
swobody ruchu
Staw śródstopno-palcowy palucha -
2
°
swobody ruchu
Staw międzypaliczkowy palucha -
1
°
swobody ruchu
Stawy śródstopno-palcowe palców II-V -
2
°
swobody ruchu
Stawy międzypaliczkowe palców II-V-
1
°
swobody ruchu
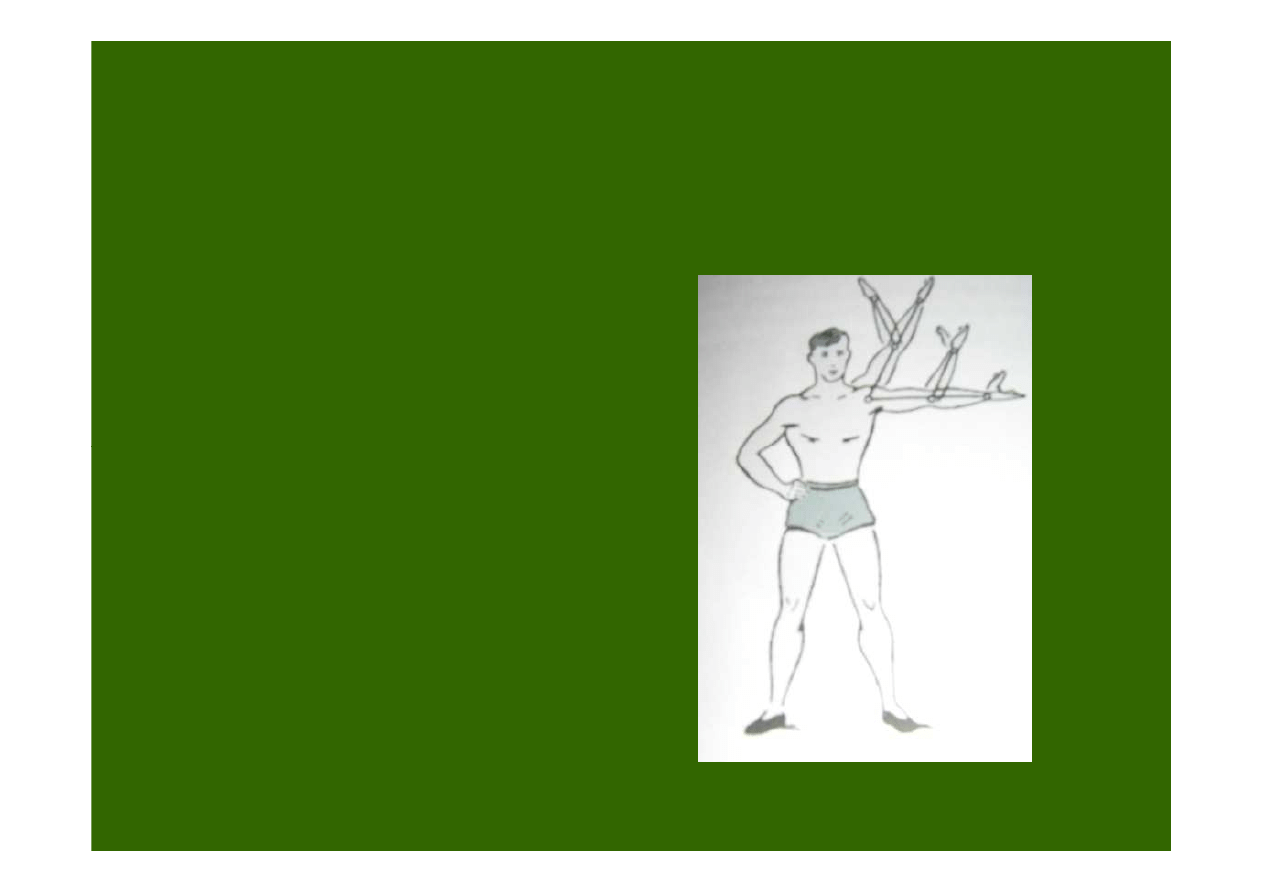
Otwarty łańcuch kinematyczny
• to łańcuch, w kt
ó
rym
końcowe ogniwo jest
swobodne i łączy się
tylko z jednym,
tylko z jednym,
sąsiednim ogniwem.
Ruchy ogniw są
niezależne od siebie i
chociaż jeden z człon
ó
w
nie wchodzi w pełne
połączenie z innymi .
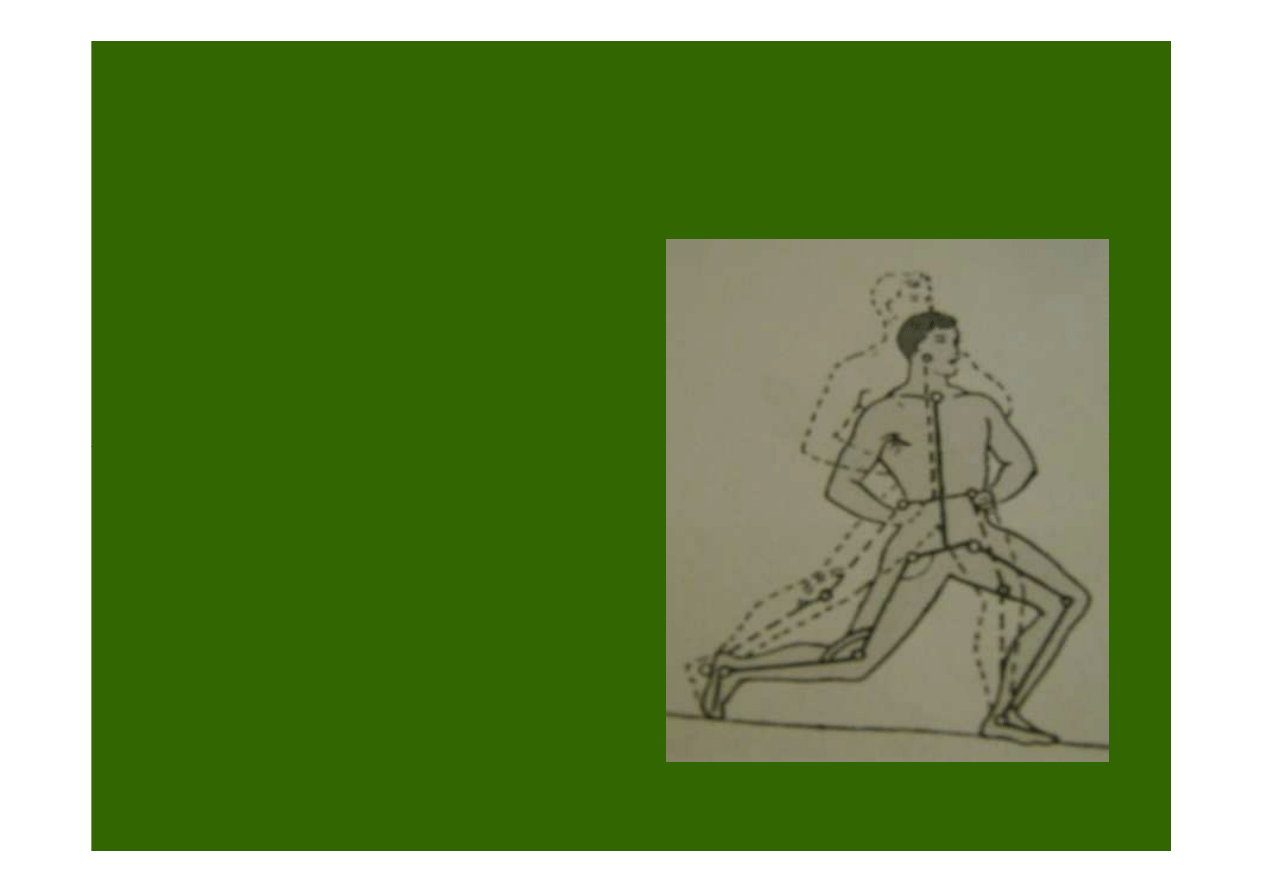
Zamknięty łańcuch
kinematyczny
• to łańcuch w kt
ó
rym,
końcowe ogniwo nie
jest swobodne. Ruch
jednego ogniwa
powoduje określony
powoduje określony
ruch innych ogniw, a
każdy jego człon jest
połączony z co
najmniej dwoma
innymi członami.

Układy stawowe , zwane łańcuchami biokinematycznymi, tworzą
w narządzie ruchu pięć łańcuch
ó
w stawowych: jeden szyjno-
tułowiowy i cztery kończynowe
ŁAŃCUCH SZYJNO-TUŁOWIOWY
–
jest utworzony przez
stawy szczytowo-potyliczne, szczytowo-obrotowe, oraz połączenia
międzykręgowe odcinka szyjnego, piersiowego i lędźwiowego; aż
do staw
ó
w lędźwiowo-krzyżowych
ŁAŃCUCH KOŃCZYNY G
Ó
RNEJ
–
tworzą stawy:
ŁAŃCUCH KOŃCZYNY G
Ó
RNEJ
–
tworzą stawy:
obojczykowo-mostkowy, obojczykowo-barkowy, ramienny,
łokciowy, promieniowo-łokciowy, oraz stawy nadgarstka ułożone
w postaci trzech pięter, stawy śr
ó
dręczno-palcowe,
międzypaliczkowe.
ŁAŃCUCH KOŃCZYNY DOLNEJ
–
rozpoczyna się stawem
krzyżowo-biodrowym, następnie biegnie staw biodrowy,
kolanowy, skokowe i kończy się stawami międzypaliczkowymi
stopy

Ciało człowieka składa się gł
ó
wnie z otwartych
łańcuch
ó
w kinematycznych, ponieważ ogniwa
końcowe, czyli stopa i ręka pozostają wolne.
Można r
ó
wnież wyodrębnić w ciele człowieka dwa
zamknięte łańcuchy. Jednym z nich jest klatka
piersiowa i wszystkie jej struktury ruchowe
zaangażowane w proces oddychania.
ruchy żeber wymuszają określone ruchy mostka i
ruchy żeber wymuszają określone ruchy mostka i
kręgosłupa piersiowego i r
ó
wnież odwrotnie
wymienia się 56 staw
ó
w sprzężonych, kt
ó
re
wsp
ó
łdziałają przy ruchach całej klatki piersiowej
Drugim takim łańcuchem jest miednica, gdzie
niewielka ruchomość w stawach krzyżowo-biodrowych
powoduje przy ruchu w jednym z tych staw
ó
w
określony ruch drugiego.
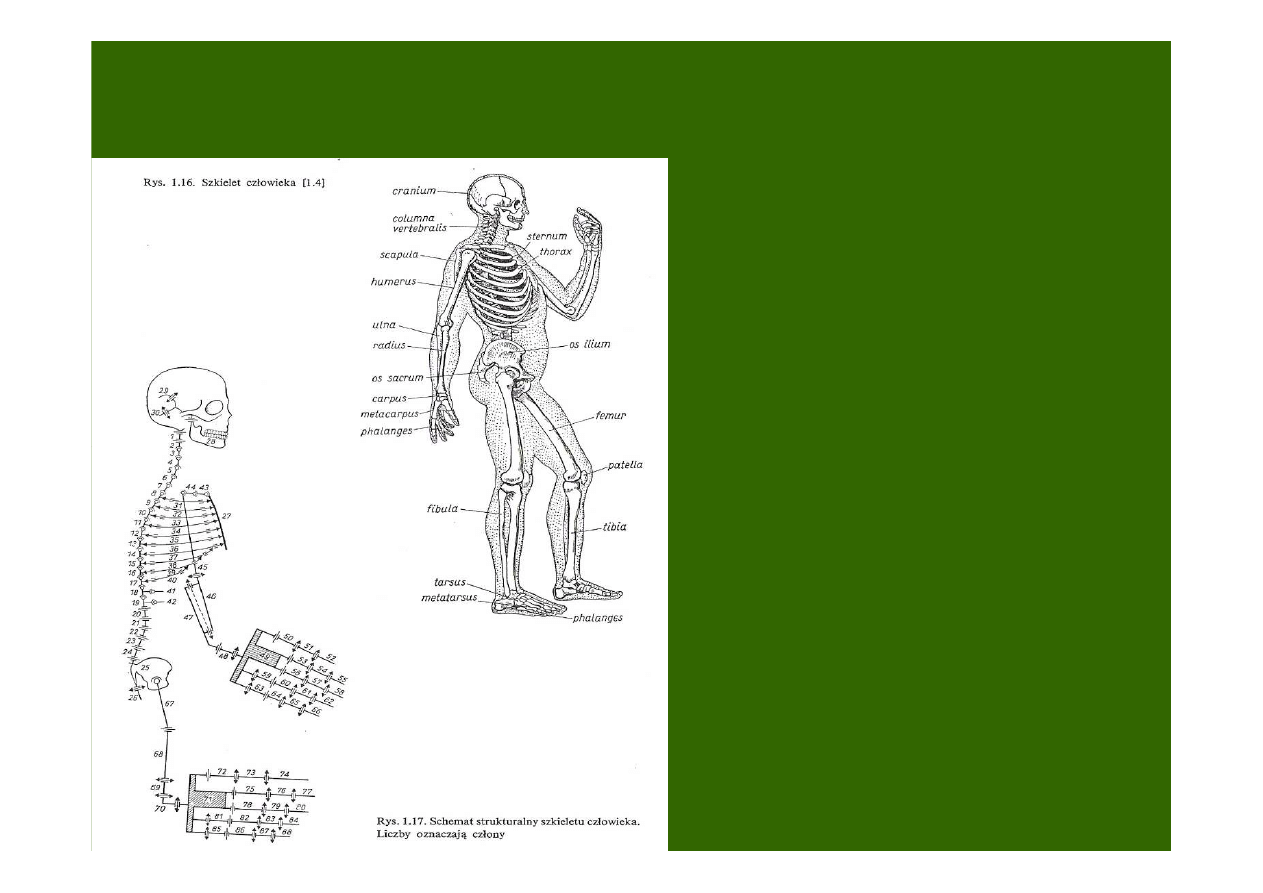
Struktura szkieletu człowieka
•
Na rysunku przedstawiono schemat strukturalny
biernego układu ruchu człowieka, potraktowanego
jako łańcuch biokinematyczny. Składa się on
z:
•
143 par kinematycznych o ruchliwości:
•
-
3
°°°°
swobody, czyli III klasy ( 29 par)
•
-
2
°°°°
swobody, czyli IV klasy ( 33 pary)
•
-
1
°°°°
swobody, czyli V klasy ( 81 par)
•
Struktura ta uwzględnia wszystkie stawy
występujące w układzie ruchu człowieka, spełniające
następujące warunki:
•
-
I
–
za ruchowe połączenie człon
ó
w uważa się
takie, w kt
ó
rym między członami występuje stale
takie, w kt
ó
rym między członami występuje stale
przynajmniej jeden punkt styku
•
-
II
–
zakres ruchu człon
ó
w względem siebie
wynosi, co najmniej 5
°°°°
kątowych
•
-
III
–
zakres ruchu postępowego człon
ó
w
względem siebie nie mniejszy niż 3 mm
•
Analiza własności ruchowych staw
ó
w człowieka,
przeprowadzona z punktu widzenia wyżej
wymienionych kryteri
ó
w, pozwala stwierdzić, że:
•
w układzie ruchu człowieka brakuje staw
ó
w
spełniających warunek III, co oznacza, że ruchy
części ciała w stawach nie zawierają składowych
postępowych, zatem ich ruchliwość, wynikająca z
wyłącznie z ruch
ó
w obrotowych nie może
przekraczać 3 stopni swobody

Stawy w układzie ruchu człowieka tworzą obrotowe pary, zatem ich ruchomość może wynosić
najwyżej trzy stopnie swobody, podczas gdy za maksymalną liczbę uważa się 6 stopni swobody.
Ruchomością łańcucha kinematycznego nazywamy, więc liczbę stopni swobody człon
ó
w
ruchomych łańcucha, względem nieruchomej podstawy, za kt
ó
rą uważa się jeden dowolnie
wybrany człon
Liczbę stopni swobody możemy obliczyć według następującego wzoru
( dotyczy par klasy od 3 do 5)
W = 6n -
ΣΣΣΣ
Pi x i
gdzie:
gdzie:
W
–
ruchomość łańcucha kinematycznego
n
–
liczba ruchomych człon
ó
w bez podstawy
i
–
klasa pary kinematycznej
Pi
–
liczba par i-tej klasy
Dodatkowo należy stwierdzić, że nie wszystkie połączenia kości uznawane są za pary
kinematyczne. Można wymienić tu połączenia za pomocą więzozrost
ó
w i chrząstkozrost
ó
w, a
także stawy p
ó
łścisłe, kt
ó
re nie są uznawane za pary kinematyczne.
Ruchomość staw
ó
w jest związana z typem jego budowy oraz kształtem powierzchni stawowych

Dla przykładu...
Kończyna g
ó
rna człowieka składa się z:
•
22 człon
ó
w ruchomych
( względem
łopatki) tworzących 22 pary o ruchliwości
3 stopni swobody ( jedna para III klasy)
•
2 stopnie swobody ( sześć par klasy IV)
•
1 stopień swobody ( 15 par klasy V)
•
Ruchomość kończyny g
ó
rnej wynosi,
zatem
: ( według wzoru)
W = 6x22
–
( 3x1+4x6+5x15)=132-
W = 6x22
–
( 3x1+4x6+5x15)=132-
(3+24+75)=132-102=
30stopni swobody
•
W podobny spos
ó
b możemy obliczyć
ruchliwość całego układu ruchu
człowieka
, kt
ó
ra względem czaszki (
traktowanej jako podstawa) wynosi:
W=6x144-(3x29+4x33+5x81)=864-
(87+132+405)=864-624=
240 stopni
swobody
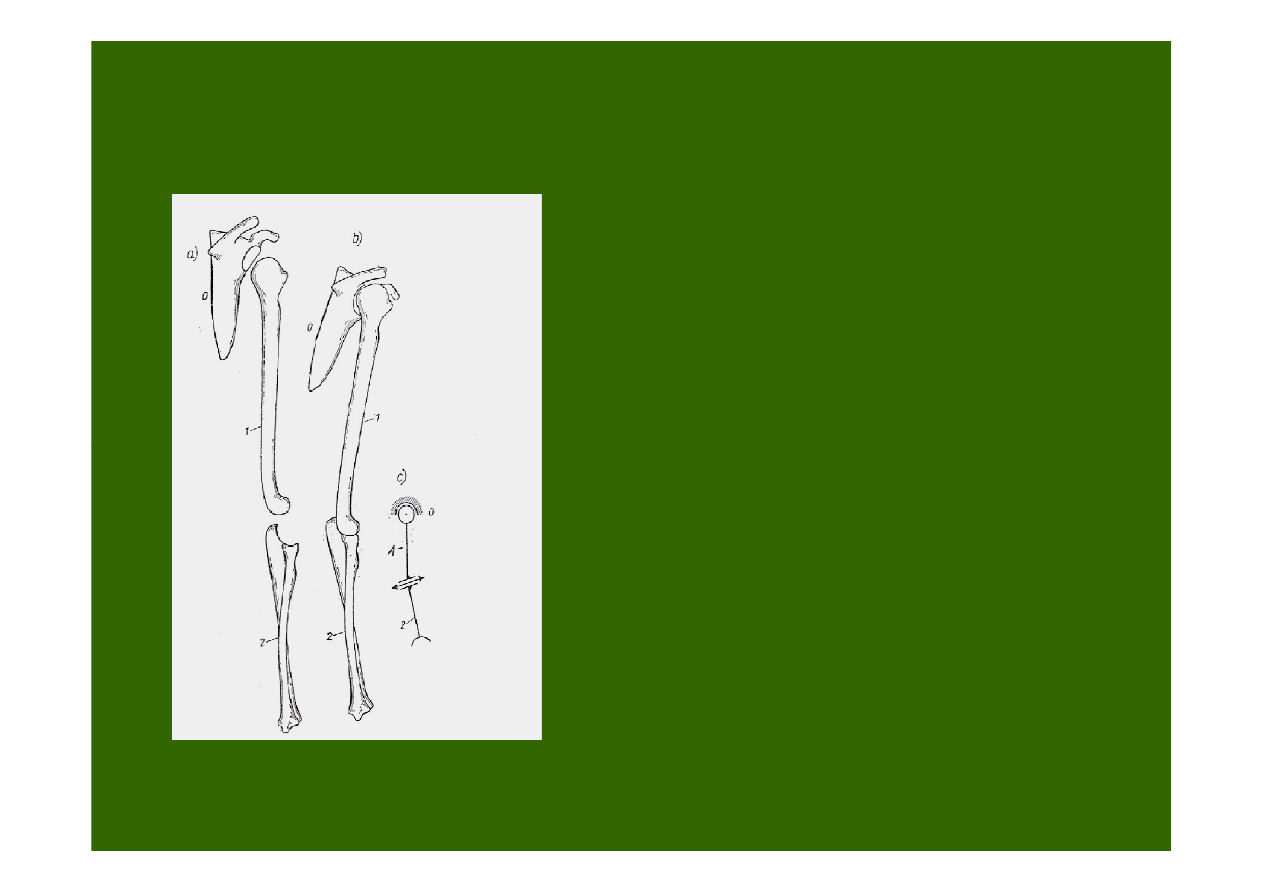
Kończyna g
ó
rna i dolna składa się z:
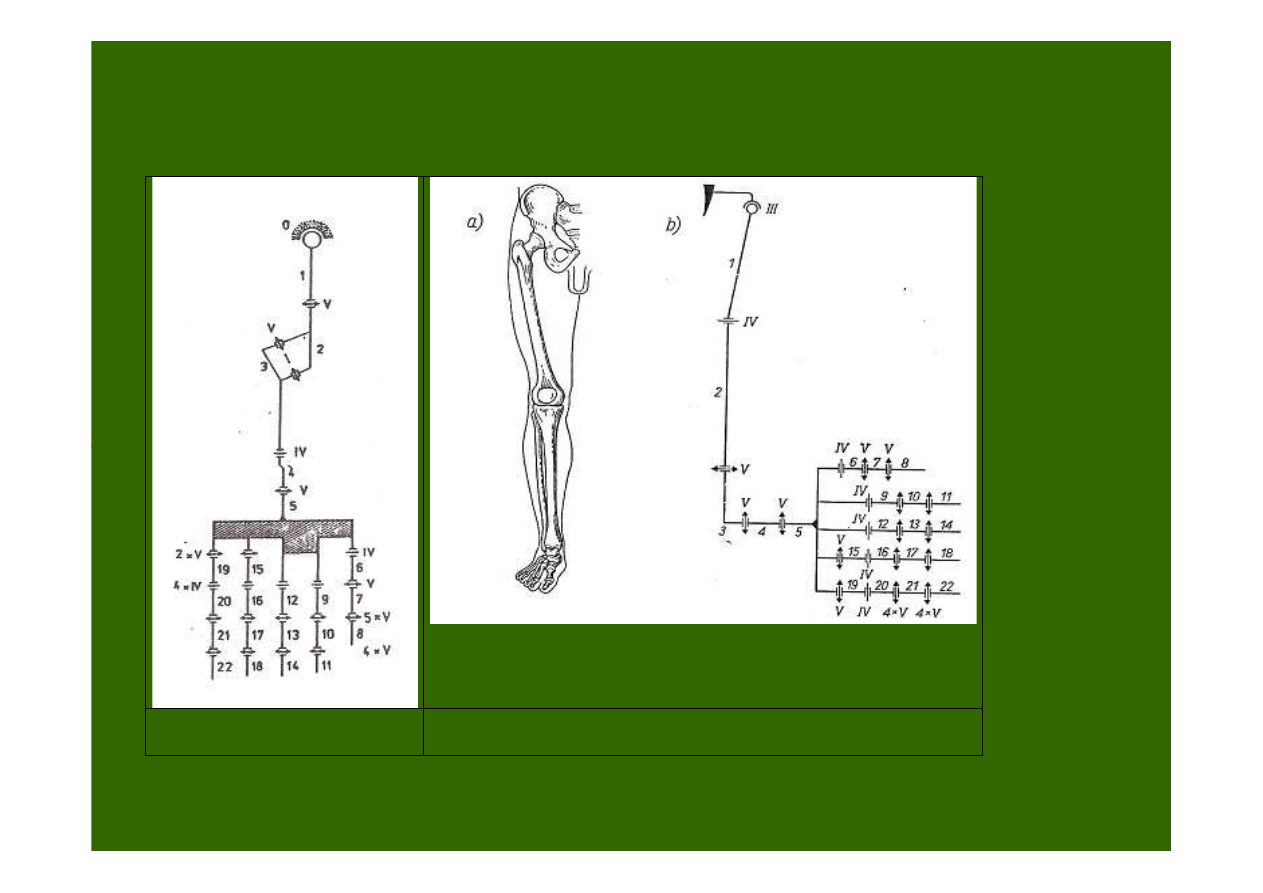
Schematyczne przedstawienie
łańcucha kończyny górnej
Schematyczne przedstawienie łańcucha kinematycznego
kończyny dolnej człowieka
Ćwiczenia w otwartych łańcuchach
kinematycznych
•
Ćwiczenia te są najczęściej do tej
pory stosowanym środkiem
terapeutycznym, stanowią
specyficzne, efektywne i izolowane
ćwiczenie pojedynczych grup
mięśniowych, odtwarzając
pojedyncze wzorce ruchowe i
charakteryzują się zwiększeniem
charakteryzują się zwiększeniem
komponenty sił ścinających w
stosunku do kompresujących.
•
W mniejszym stopniu stymulują
one priopriocepcję, przede
wszystkim aktywizuja mięśnie
antagonistyczne i synergistyczne i
nie są odpowiednie do treningu
czynności dnia codziennego i
aktywności sportowej
Ćwiczenia w zamkniętych łańcuchach
kinematycznych
•
Na przestrzeni kilku ostatnich lat ćwiczenia te
stały się jednym z podstawowych i najbardziej
popularnych środk
ó
w terapeutycznych, ponieważ
angażują duże zespoły dynamiczne, odtwarzają
najbardziej funkcjonalny wzorzec ruchowy i
charakteryzują się zwiększeniem komponenty siły
kompresujących w stosunku do ścinających
•
Część z tych ćwiczeń zapewnia lepszą stabilizację
staw
ó
w poprzez uaktywnienie zespoł
ó
w mięśni
ó
ó
otaczających dany staw
.
•
Ćwiczenia te zapewniają r
ó
wnież lepszą
dynamiczną stabilizację-pripriorecepcję,
aktywizują jednocześnie mięśnie agonistyczne,
synergistyczne i antagonistyczne.
•
Są także bezpieczniejsze od niekt
ó
rych ćwiczeń w
otwartych łańcuchach kinematycznych
•
Istotną zaletą ćwiczeń w zamkniętych łańcuchach
kinematycznych jest to, że poprzez działanie
wielostawowe i angażowanie większej grupy
mięśni w dużym stopniu poprawiają one
priopriorecepcję.

Dla przykładu....

U pacjent
ó
w po
rekonstrukcji więzadła
krzyżowego przedniego
, u kt
ó
rych w początkowej
fazie procesu usprawniania stosuje się tylko
ćwiczenia w zamkniętych łańcuchach
kinematycznych (uznane za bardziej bezpieczne i
funkcjonale dla przeszczepu), zapomniano o
funkcjonale dla przeszczepu), zapomniano o
potrzebach, izolowanych ćwiczeniach mięśnia
czworogłowego uda w pozycjachbezpiecznych dla
przeszczepu. Pociąga to za sobą osłabienie tego
mięśnia i związane z tym dolegliwości np.
dolegliwość ze strony stawu rzepkowo-udowego

Dlatego też aby proces
usprawniania pacjenta był
optymalny wskazane jest
łączenie obu rodzaj
ó
w
łączenie obu rodzaj
ó
w
ćwiczeń, w zależności od
potrzeb.

Dziękuję za uwagę...
Wyszukiwarka
Podobne podstrony:
1 Definicje mikro i nanotechnologii uzupełniony [tryb zgodności]
Ćwiczenia w otwartych i zamkniętych łańcuchach kinematycznych
2012 KU W5 tryb dzienny moodle tryb zgodnosci
(W7a Stale do kszta t na zimno cz I [tryb zgodno ci])
2 Sieci komputerowe 09 03 2013 [tryb zgodności]
Microsoft PowerPoint IP5 klasyfikacje tryb zgodnosci
Microsoft PowerPoint IP tryb zgodnosci
PA2 opis matematyczny [tryb zgodności]
ATMOSFERA [tryb zgodnosci]a id Nieznany
(Rachunkowosc podatkowa wyklad 4 5 [tryb zgodności])
Microsoft PowerPoint IP5 bazydanych tryb zgodnosci
OUN2009 [tryb zgodno
USTALANIE ŁAŃCUCHA BIOKINEMATYCZNEGO, Fizjoterapia CM UMK, Biomechanika
Bankowosc materialy 14 [tryb zgodnosci]
MikroI 9 [tryb zgodnosci]
(5 ja i samoocena (1 ) [tryb zgodności])id 1080
MT st w 06 [tryb zgodności]
cz 1c projektowanie systemow czasu rzeczywistego tryb zgodnosci
więcej podobnych podstron