1
Ruch ogólny bryły
Wykład - kinematyka
2
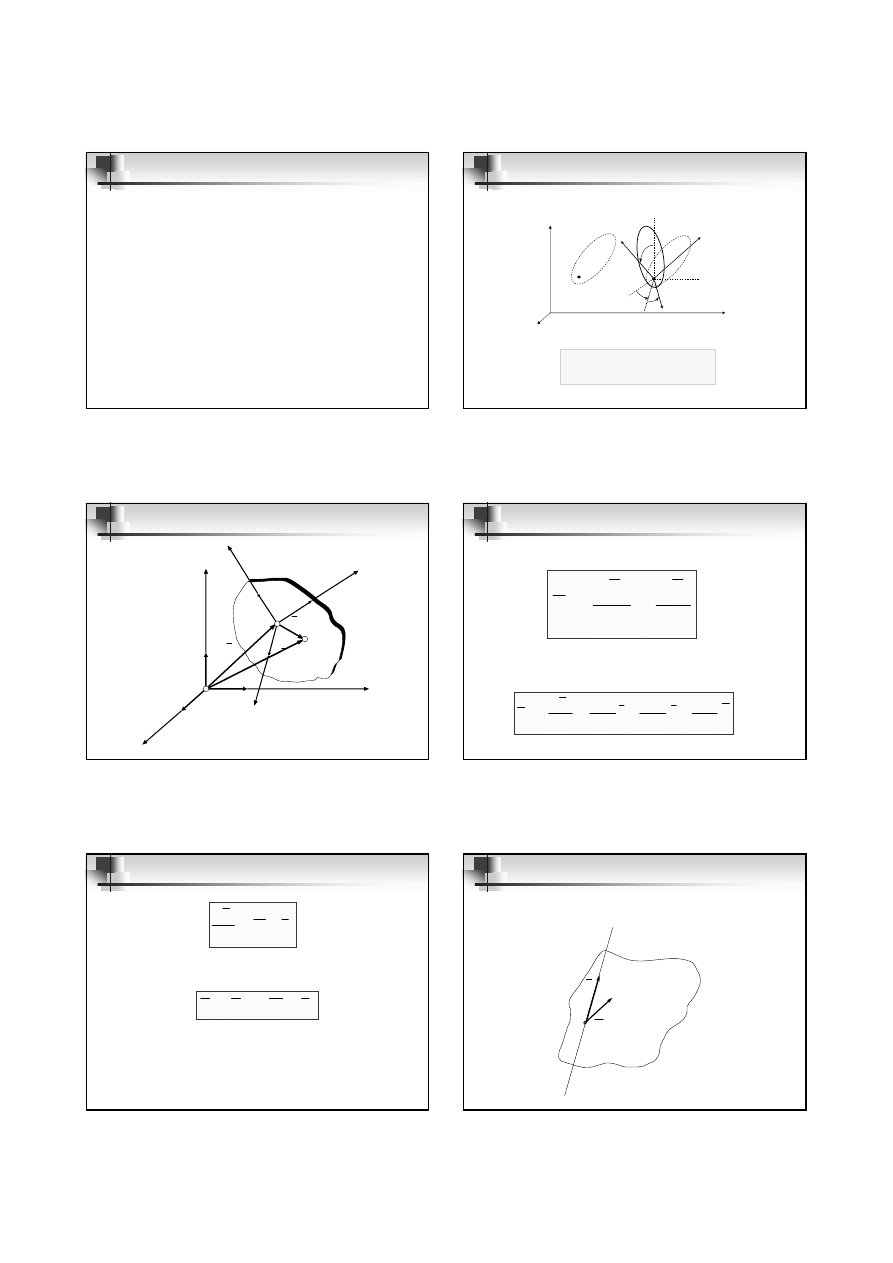
Przemieszczenia bryły w ruchu ogólnym
0
x
y
z
I
II
A
A
N
ψ ϕ
υ
Ruch ogólny jest więc złożony z ruchu postępowego i kulistego
Współrzędne bieguna A i kąty Eulera są pewnymi funkcjami czasu, a więc:
( )
( )
( )
( )
( )
( )
=
=
=
=
=
=
.
,
,
,
,
,
6
5
4
3
2
1
t
f
t
f
t
f
t
f
z
t
f
y
t
f
x
A
A
A
υ
ϕ
ψ
Powyższe równania będziemy nazywać równaniami ruchu ogólnego.
3
Prędkość dowolnego punktu bryły w ruchu ogólnym
y
y’
x
z
O
P
i
k
j
k’
j’
i’
A
z’
x’
r
r’
r
A
4
Prędkość punktu P wyraża zależność:
Pochodna wektora r
A
względem czasu jest prędkością
punktu A:
Prędkość dowolnego punktu bryły w ruchu ogólnym
dt
'
r
d
dt
r
d
v
A
+
=
k
dt
dz
j
dt
dy
i
dt
dx
dt
r
d
v
A
A
A
A
A
+
+
=
=
5
Prędkość dowolnego punktu bryły w ruchu ogólnym
Pochodna wektora r’:
Zatem prędkość dowolnego punktu P bryły w ruchu ogólnym
określa zależność:
Prędkość dowolnego punktu P bryły jest równa sumie prędkości
v
A
dowolnie obranego bieguna A, przyjętego za początek
ruchomego układu współrzędnych, oraz iloczynu wektorowego
ω
ωω
ω
×r’ prędkości kątowej
ω
ωω
ω
i promienia wodzącego r’ punktu P w
ruchomym układzie współrzędnych.
'
r
dt
'
r
d
×
=
ω
'
r
v
v
A
×
+
=
ω
7
V
A
ω
A
Chwilowa oś obrotu
Niech chwilowy ruch bryły określony będzie wektorami
ω
ωω
ω
i V
A
.
Prędkość dowolnego punktu bryły w ruchu ogólnym

2
8
V
A
V
ω
A
V
1
Chwilowa oś obrotu
Rozłożymy prędkość bieguna V
A
na dwie składowe, z których
jedna ma kierunek chwilowej osi obrotu, a druga jest do niej prostopadła.
Składowe te na rysunku oznaczymy przez V i V
1
.
Prędkość dowolnego punktu bryły w ruchu ogólnym
9
V
A
V
ω
A
V
1
Chwilowa oś obrotu
Na kierunku prostopadłym do płaszczyzny, w której leżą obie składowe,
odmierzamy odcinek AP:
ω
1
V
AP
=
Wyznaczony punkt P ma prędkość
równą
sumie
geometrycznej
prędkości ruchu postępowego V
A
i
prędkości obrotu V
P0
.
1
0
P
0
P
V
V
czyli
,
AP
V
=
⋅
=
ω
Kierunek
tych
prędkości
jest
jednakowy,
a
ich
zwroty
są
przeciwne. Punkt P
ma więc
prędkość równa:
V
V
V
V
0
P
A
P
=
+
=
V
A
.
P
V
P0
V
P
=V
Oś centralna
Oś centralna ruchu ogólnego
10
Punkt P i wszystkie punkty
leżące na osi równoległej do
ω
,
przechodzącej przez punkt P,
mają prędkość równoległą do
chwilowej osi obrotu. Oś tę
nazywamy
osią
centralną
ruchu ogólnego.
Oś centralna ruchu ogólnego
.
.
A
V
A
ω
P
V
A
V
P0
Oś centralna
V
P
12
Punkt P i wszystkie punkty leżące na
osi równoległej do
ω
, przechodzącej
przez punkt P, mają
prędkość
równoległą do chwilowej osi obrotu.
Oś tę nazywamy osią centralną
ruchu ogólnego.
Oś centralna ruchu ogólnego
.
.
A
V
A
ω
P
V
A
V
P0
Oś centralna
V
P
14
Przyspieszenie dowolnego punktu bryły w ruchu ogólnym
'
r
)
'
r
(
'
r
a
a
2
A
ω
ω
ω
ε
−
⋅
+
×
+
=
Wzór na przyspieszenie punktu można przedstawić w nieco innej postaci po
rozpisaniu występującego w nim podwójnego iloczynu wektorowego zgodnie
z zależnością:
Wyszukiwarka
Podobne podstrony:
5 wykl kin
wykl kin 4
wykl kin 3
wykl 8 Mechanizmy
Stomatologia czesc wykl 12
Wykł 1 Omówienie standardów
Wykl 1
KOMPLEKSY POLAKOW wykl 29 03 2012
Wykł 1B wstępny i kinematyka
Ger wykł II
Wykł BADANIA KLINICZNO KONTROLNE I PRZEKROJOWE
Wykł 05 Ruch drgający
podstawy prawa wykl, Prawo dz 9
łuszczyca wykł
więcej podobnych podstron