
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
81
Chapter 6
Non-linear Dynamics
6.1
Non-linear State Equations
We have seen that a linear system of state equations can be put in the following form
Du
Cx
y
Bu
Ax
x
+
=
+
=
where x is the state vector, y is the output vector, u is the input vector, and the matrices,
A, B, C, and D describe the static and dynamic characteristics of the system.
Non-linear systems cannot be represented this way. Instead we must write
( )
( )
u
x
g
y
u
x
f
x
,
,
=
=
where f and g are vectors of non-linear function in the state vector (x) and input vector
(y).
The parallel-plate electrostatic actuator of Fig. 5.1 (repeated here for convenience) is an
example of such a nonlinear system.
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
82
+
-
V
in
I
V
E
k
m
z
b
R
+
-
g
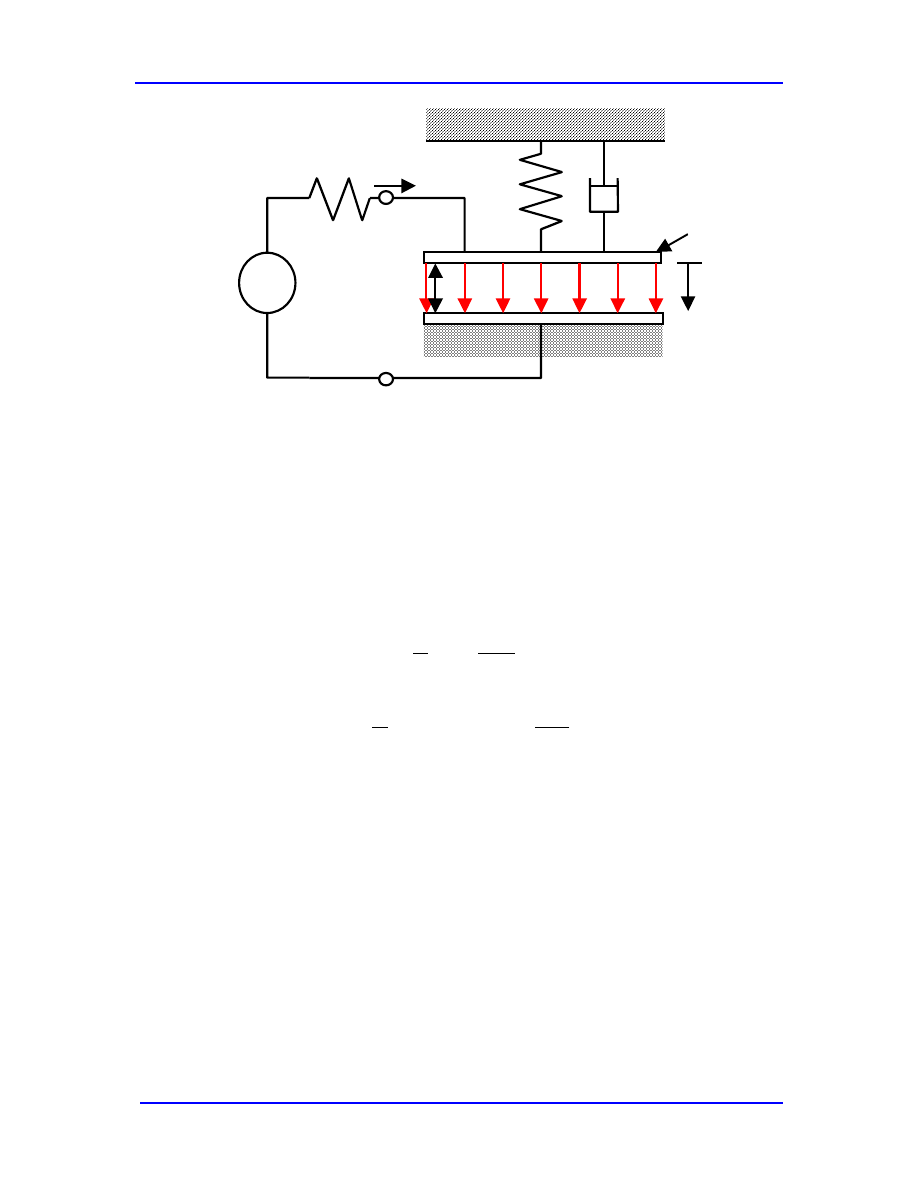
Figure 6.1. Parallel plate capacitor/mechanical oscillator with electrical and mechanical
energy storage and damping. There are three mechanisms for energy
storage; electrostatic, potential energy of the mechanical spring, and kinetic
energy of the moving plate. There are therefore three independent state
variables in the description of the system.
We found the following state equations for this system
(
)
÷÷
÷
÷
÷
÷
÷
ø
ö
çç
ç
ç
ç
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ
+
−
+
−
÷
ø
ö
ç
è
æ
−
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
=
ε
ε
A
x
g
x
k
bx
m
x
A
x
x
V
R
g
g
Q
x
x
x
in
2
1
1
2
1
0
2
3
3
2
1
3
2
1
x
where Q is the charge on the capacitor, g is the capacitor gap, g
0
is the capacitor gap
without an applied force, R is the series resistance in the electrical domain, V
in
is the
applied voltage, A is the area of the capacitor,
ε is the dielectric constant in the gap, m is
the mass of the moving plate, b is the damping constant, and k is the spring constant. We
see that these equations cannot be expressed in linear matrix notation.
We have solved these equations in steady state (fixed-point analysis) and found sets of
stable and unstable solutions.
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
83
6.2
Linarization of State Equations
Fixed-point analysis naturally does not let us calculate the dynamical characteristics of a
system (although knowledge of the steady-state solutions allows us to develop intuition
about a system, and this intuition can be very valuable when trying to model dynamic
behavior). To learn more, we linearize the state equations around a fixed operating
point.
Assume that the solutions can be written as a sum of a fixed part and a small time varying
part
( )
( )
( )
( )
t
t
t
t
u
U
u
x
X
x
0
0
δ
δ
+
=
+
=
Taylor’s theorem gives
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
÷÷
÷
÷
÷
÷
ø
ö
çç
ç
ç
ç
ç
è
æ
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
+
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
÷÷
÷
÷
÷
÷
ø
ö
çç
ç
ç
ç
ç
è
æ
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
m
U
X
m
m
n
m
n
U
X
n
n
n
n
n
u
u
u
f
u
f
u
f
u
f
x
x
x
f
x
f
x
f
x
f
x
x
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
M
L
M
M
L
M
L
M
M
L
&
M
&
1
,
1
1
1
1
1
,
1
1
1
1
1
0
0
0
0
These equations are in the form treated earlier, and we can find solutions by inverting the
appropriate matrices.
6.3
Linearization of the Electrostatic Actuator
If we know use this formalism on our electrostatic actuator example, we find
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
84
(
)
in
in
V
R
x
x
x
m
b
m
k
mA
X
RA
X
RA
X
x
x
x
A
x
g
x
k
bx
m
x
A
x
x
V
R
g
g
Q
x
x
x
⋅
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
+
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
⋅
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
−
−
−
−
−
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
⋅
÷÷
÷
÷
÷
÷
÷
ø
ö
çç
ç
ç
ç
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ
+
−
+
−
÷
ø
ö
ç
è
æ
−
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
=
δ
δ
δ
δ
ε
ε
ε
δ
δ
δ
ε
ε
0
0
1
1
0
0
0
2
1
1
3
2
1
10
10
20
3
2
1
2
1
0
2
3
3
2
1
3
2
1
x
In the Lapalace domain this becomes
BU
AX
X
+
=
⋅
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
+
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
⋅
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
−
−
−
−
−
=
÷
÷
÷
ø
ö
ç
ç
ç
è
æ
⋅
⋅
⋅
s
V
R
x
x
x
m
b
m
k
mA
X
RA
X
RA
X
x
x
x
s
in
δ
δ
δ
δ
ε
ε
ε
δ
δ
δ
0
0
1
1
0
0
0
3
2
1
10
10
20
3
2
1
Now we can find the transfer functions of the linarized model through the customary
relation
B
A
I
C
H
1
)
(
)
(
−
−
=
s
s
In this case we have a third order transfer function, which is what we expect from a
systems with three state variables.
6.4 Softening
Spring
Even a linearized problem can be complex as we just saw for the parallel-plate
electrostatic actuator. In many instances it is a good idea to further simplify the problem
to gain insight into a specific type of behavior. As an example, we consider the softening
spring effect in parallel-plate capacitors (we briefly considered this problem earlier).
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
85
The nonlinear characteristics of the electrostatic force creates an “electrostatic spring”
that leads to shifts of the natural frequency of microactuators
1
, and that can be used to
tune both the sense-mode frequency and the sensitivity of microsensors
2
. To investigate
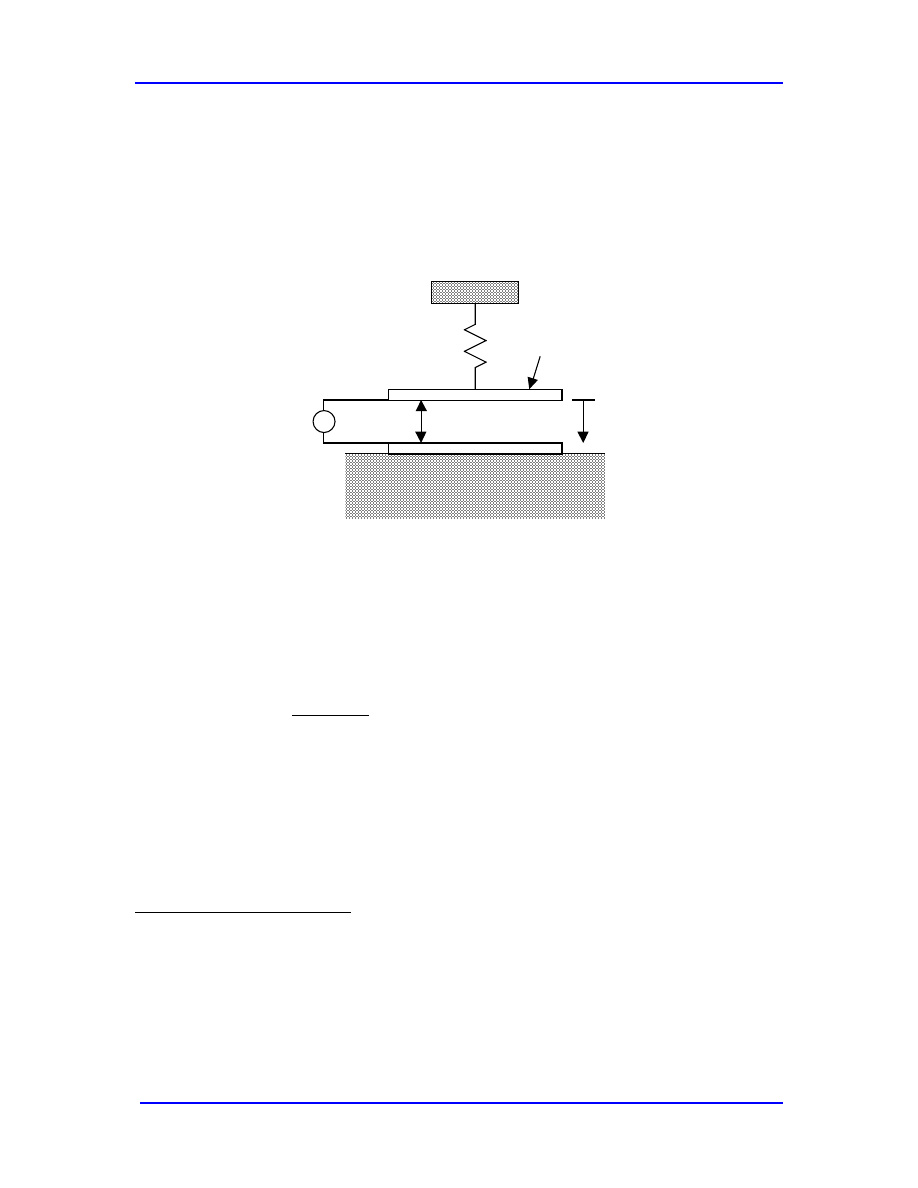
this phenomenon, we simplify the electrostatic as illustrated in Fig. 6.2.
s
0
m
k
V
+
-
x
Figure 6.2. Schematic drawing of parallel-plate MEMS resonator with an applied
voltage that creates an electrostatic spring that modifies the spring
constant, and therefore the natural frequency, of the resonator.
Neglecting fringing fields (not because they are not important, but because it is easy), and
the damping, we can write the force balance for the upper plate as:
2
0
2
0
)
(
2
x
s
V
kx
x
m
−
=
+
ε
(6.4.1)
where
ε
0
is the dielectric constant and the other parameters are defined in Fig.6.2. The
nonlinear electrostatic force (the right-hand side of Eq.6.4.1) can be expanded in a Taylor
series around a nominal displacement x
0
:
1
Y.He, J. Marchetti, C. Gallegos, F. Maseeh, “Accurate fully-coupled natural
frequency shift of mems actuators due to voltage bias and other external forces”,
Proceedings of MEMS 99.
2
W.A. Clark, R.T. Howe, R. Horowitz, “Surface micromachined z-axis vibratory
rate gyroscope”, Proceedings of the Solid-Sate Sensor and Actuator Workshop, pp. 283-
287, Hilton Head, North Carolina, June 1996.
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
86
( )( )
ú
û
ù
ê
ë
é
+
−
−
+
−
=
+
−
−
+
−
≈
+
−
−
−
−
+
−
≈
−
=
=
=
K
K
K
0
0
0
2
0
0
2
0
0
3
0
0
2
0
2
0
0
2
0
0
3
0
2
0
2
0
2
0
2
0
2
0
1
)
(
2
)
(
)
(
)
(
2
)
(
)
(
2
1
2
)
(
2
)
(
2
0
0
x
s
x
x
x
s
V
x
x
x
s
V
x
s
V
F
x
x
x
s
V
x
s
V
x
s
V
F
e
x
x
x
x
e
ε
ε
ε
ε
ε
ε
(6.4.2)
Inserting Eq. 6.4.2 into 6.4.1 yields:
ú
û
ù
ê
ë
é
−
−
−
=
÷
÷
ø
ö
ç
ç
è
æ
−
−
+
ú
û
ù
ê
ë
é
−
−
+
−
=
+
=
0
0
0
2
0
0
2
0
3
0
0
2
0
0
0
0
2
0
0
2
0
2
1
)
(
2
)
(
2
1
)
(
2
x
s
x
x
s
V
x
x
s
V
k
x
m
x
s
x
x
x
s
V
kx
x
m
F
ε
ε
ε
(6.4.3)
The equation is the familiar expression for a second order resonance. We see that the
mechanical spring constant is modified by the electrostatic force. This leads to a
modified resonance frequency given by:
2
1
3
0
0
2
0
)
(
÷
÷
ø
ö
ç
ç
è
æ
−
−
=
x
s
m
V
m
k
res
ε
ω
(6.4.4)
The voltage required for a specific static deflection, x
0
, is found from Eq. 6.4.1 (without
the time derivative term):
)
(
2
)
(
)
(
2
0
0
0
3
0
0
2
0
2
0
0
2
0
0
x
s
m
kx
x
s
m
V
x
s
V
kx
−
=
−
Þ
−
=
ε
ε
(6.4.5)
Inserted into Eq. 6.4.4, this gives:
0
0
0
2
1
0
0
0
2
1
)
(
2
x
s
x
m
k
x
s
m
kx
m
k
res
−
−
=
÷÷ø
ö
ççè
æ
−
−
=
ω
(6.4.6)
Solving equation 6.4.5 for the voltage, V, and maximizing, gives us the maximum
voltage, and the corresponding deflection, that the plate-spring system can support.
Applied voltages larger than this maximum will lead to spontaneous “pull-in” or “snap-
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
87
down” to the substrate of the spring-supported plate. We’ll call this voltage (deflection)
the electrostatic instability voltage (deflection).
2
0
0
0
0
)
(
2
x
s
kx
V
−
=
ε
(6.4.7)
(
)
3
)
(
2
2
)
(
2
)
(
2
0
0
0
2
0
0
0
0
0
0
0
2
0
0
0
s
x
x
s
kx
x
s
x
x
s
k
x
V
=
Þ
−
−
+
−
=
=
∂
∂
ε
ε
(6.4.8)
3
0
0
2
0
0
0
0
27
8
)
3
(
3
2
s
k
s
s
ks
V
snap
ε
ε
=
−
=
(6.4.9)
0
3
2
1
0
0
0
=
−
−
=
x
s
s
m
k
snap
ω
(6.4.10)
At the instability, the resonance frequency goes to zero.
This type of “voltage controlled oscillator” has many applications. We will discuss some
of them when we go through the solutions to homework #2.
6.5
Numerical Simulations of Non-linear Systems of Equations -
Simulink
One of the simplest and most accessible tools we have for numerical simulations of non-
linear systems of equations is SIMULINK
®
which is a Matlab
®
application
3
. In
SIMULINK
®
, we program by drawing block diagrams. We choose a set of built-in
functions represented by blocks and connect them into circuits of flow diagrams.
Figure 6.3 shows a simple (and familiar) example of a SIMULINK
®
“program”: that of a
mechanical oscillator. This particular example is linear (the input is the force on the
system), so we can solve it analytically as we have done earlier. Numerical simulations
3
We will use SIMULINK quite a bit in this course. If you don’t have access to it, please let me know.
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
88
therefore add very little in this specific case, but adding non-linearities and other
complexities doesn’t make the
s
1
x2dot
s
1
x2
Mux
x1 & x2
s+10
10
x1
1
wn^2
Chirp Signal
Actual
Position
2*0.2
2*zeta*wn
Figure 6.3. SIMULINK® “program” of a mechanical oscillator.
More in-depth treatments of the electrostatic actuator are shown in Figure 6.4 and 6.5.
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
89
s
1
Charge
1/s
Position
1/R
1/(eA)
Electrostatic
force
V
in
Q
*
Qg
g
g
0
-1/m
s
1
Velocity
g_dot
b
k
Q
2
/(2*
ε*A)
Figure 6.4. Simulink model of electrostatic actuator driven by a voltage source with a
finite series resistance.
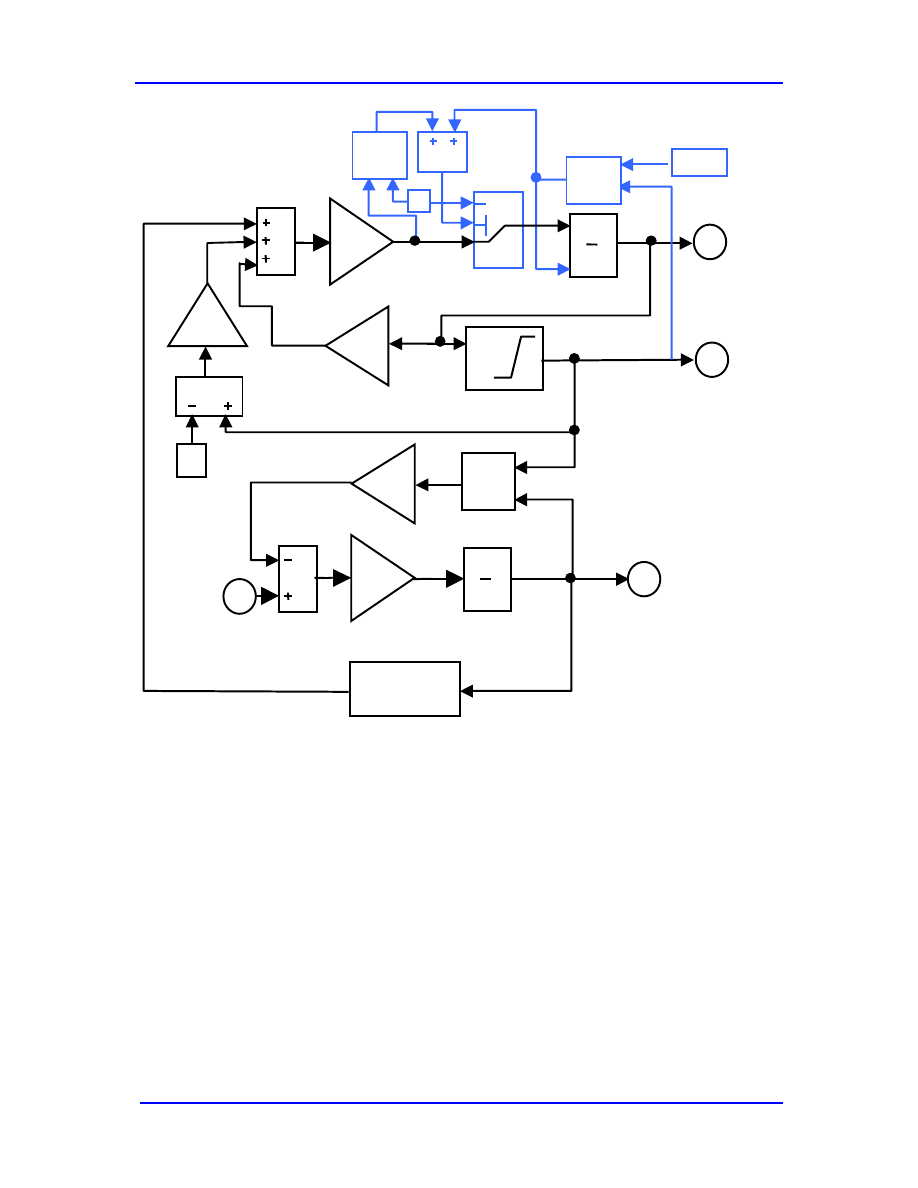
Nonlinear Dynamics
os, 4/22/02
EE 321, MEMS Design
90
s
1
Charge
1/s
Position
1/R
1/(eA)
Electrostatic
force
V
in
Q
*
Qg
g
g
0
-1/m
s
1
Velocity
g_dot
b
k
Q
2
/(2*
ε*A)
>
g
min
g>g
min
>
0
Figure 6.5. Simulink model for simulating pull-in effects in electrostatic actuators .
These examples illustrate the strengths and weaknesses of numerical modeling with
Simulink. On the positive side, we can model very complex systems that are not
tractable analytically. Many common nonlinear phenomena in MEMS, including
actuators with hysteresis and stiffening springs, can be simulated. The results are,
however, not better than the component models we are using.
Wyszukiwarka
Podobne podstrony:
06. Klasyfikacja wpływów dynamicznych, EGZAMIN INZYNIERSKI
20 Linearyzacja dynamiczna twierdzenie Charleta Levine Marino
Odrzucenie skargi kasacyjnej Tarno JP PP 2005 06 33, Prawo
20 Linearyzacja dynamiczna twierdzenie Charleta Levine Marino
A Novel Switch mode DC to AC Inverter With Non linear Robust Control
Chang S Y A Non linear elliptic equations in conformal geometry (EMS, 2004)(ISBN 303719006X)(O)(100s
Linear and non Linear SR 2012
PP MEMS 03 Electrostatic Actuation
A Novel Switch Mode Dc To Ac Inverter With Non Linear Robust Control
06 E83 Chassis Dynamics
06 E85 Chassis Dynamics
A Comparison of Linear Vs Non Linear Models of Aversive Self Awareness, Dissociation, and Non Suicid
Non linear rheology of active particle suspensions
06 Klasyfikacja wpływów dynamicznych, charakterystyki dynamiczne konstrukcjiid 6137 pptx
78 Non Linear Circuits
PP 2008 06
Linearization of non linear state equation
06 E65 Driving Dynamics
więcej podobnych podstron