„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Grzegorz Śmigielski
Użytkowanie układów automatyki okrętowej
314[03].O2.02
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Piotr Dubis
mgr inż. Marcin Januszewski
Opracowanie redakcyjne:
mgr inż. Grzegorz Śmigielski
Konsultacja:
dr inż. Marcin Chrzan
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 314[03].O2.02
„Użytkowanie układów automatyki okrętowej”, zawartego w modułowym programie
nauczania dla zawodu technik mechanik okrętowy.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Podstawy teorii sterowania i regulacji
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
21
4.1.3. Ćwiczenia
21
4.1.4. Sprawdzian postępów
22
4.2. Automatyka okrętowa
23
4.2.1. Materiał nauczania
23
4.2.2. Pytania sprawdzające
29
4.2.3. Ćwiczenia
30
4.2.4. Sprawdzian postępów
31
4.3. Układy sterowania silnikami spalinowymi
32
4.3.1. Materiał nauczania
32
4.3.2. Pytania sprawdzające
38
4.3.3. Ćwiczenia
39
4.3.4. Sprawdzian postępów
39
4.4. Układy automatyki elektrowni okrętowej
40
4.4.1. Materiał nauczania
40
4.4.2. Pytania sprawdzające
52
4.4.3. Ćwiczenia
52
4.4.4. Sprawdzian postępów
53
5. Sprawdzian osiągnięć
54
6. Literatura
58
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik ten będzie Ci pomocny w nabywaniu umiejętności eksploatacji i drobnych
napraw układów sterowania i regulacji jakie są zainstalowane na pokładach jednostek
pływających.
W poradniku znajdziesz:
−
wymagania wstępne, czyli wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
aby bez problemów opanować treści nauczania w ramach jednostki modułowej
Użytkowanie układów automatyki okrętowej O2.02 zawartego w modułowym programie
nauczania dla zawodu Technik mechanik okrętowy 314[03].
−
cele kształcenia, czyli wykaz umiejętności, jakie powinieneś nabyć podczas zajęć
w ramach tej jednostki modułowej,
−
materiał nauczania, czyli niezbędne minimum wiadomości teoretycznych, wymaganych
do opanowania treści jednostki modułowej,
−
zestaw pytań przydatny do sprawdzenia, czy już opanowałeś wymagane treści nauczania,
−
ćwiczenia, podczas których będziesz doskonalił umiejętności praktyczne w oparciu
o wiedzę teoretyczną, zaczerpniętą z poradnika i innych źródeł,
−
sprawdzian osiągnięć, czyli przykładowy zestaw zadań i pytań. Pozytywny wynik
sprawdzianu potwierdzi, że dobrze wykorzystałeś zajęcia i uzyskałeś niezbędną wiedzę
i umiejętności z zakresu tej jednostki modułowej,
−
wykaz literatury uzupełniającej.
Poradnik zawiera materiał nauczania składający się z 4 rozdziałów:
−
rozdział „Podstawy teorii sterowania i regulacji”, pomoże Ci się zapoznać podstawowymi
definicjami i zależnościami w układach sterowania i regulacji wielkości parametrów
technicznych,
−
rozdział „Automatyka okrętowa” prezentuje budowę i zasadę działania podstawowych
układów regulacji na pokładach jednostek pływających,
−
rozdział „Układy sterowania silnikami spalinowymi” prezentuje najczęściej stosowane
układy maszynowni,
−
rozdział „Układy automatyki elektrowni okrętowej”, ma Ci pomóc zapoznać się
z niektórymi układami automatyki pracującymi w pokładowych zespołach generatorów
elektroenergetycznych.
Jeżeli masz trudności ze zrozumieniem tematu lub ćwiczenia, to poproś nauczyciela lub
instruktora o wyjaśnienie i ewentualne sprawdzenie, czy dobrze wykonujesz daną czynność.
Po przerobieniu materiału spróbuj zaliczyć sprawdzian z zakresu jednostki modułowej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
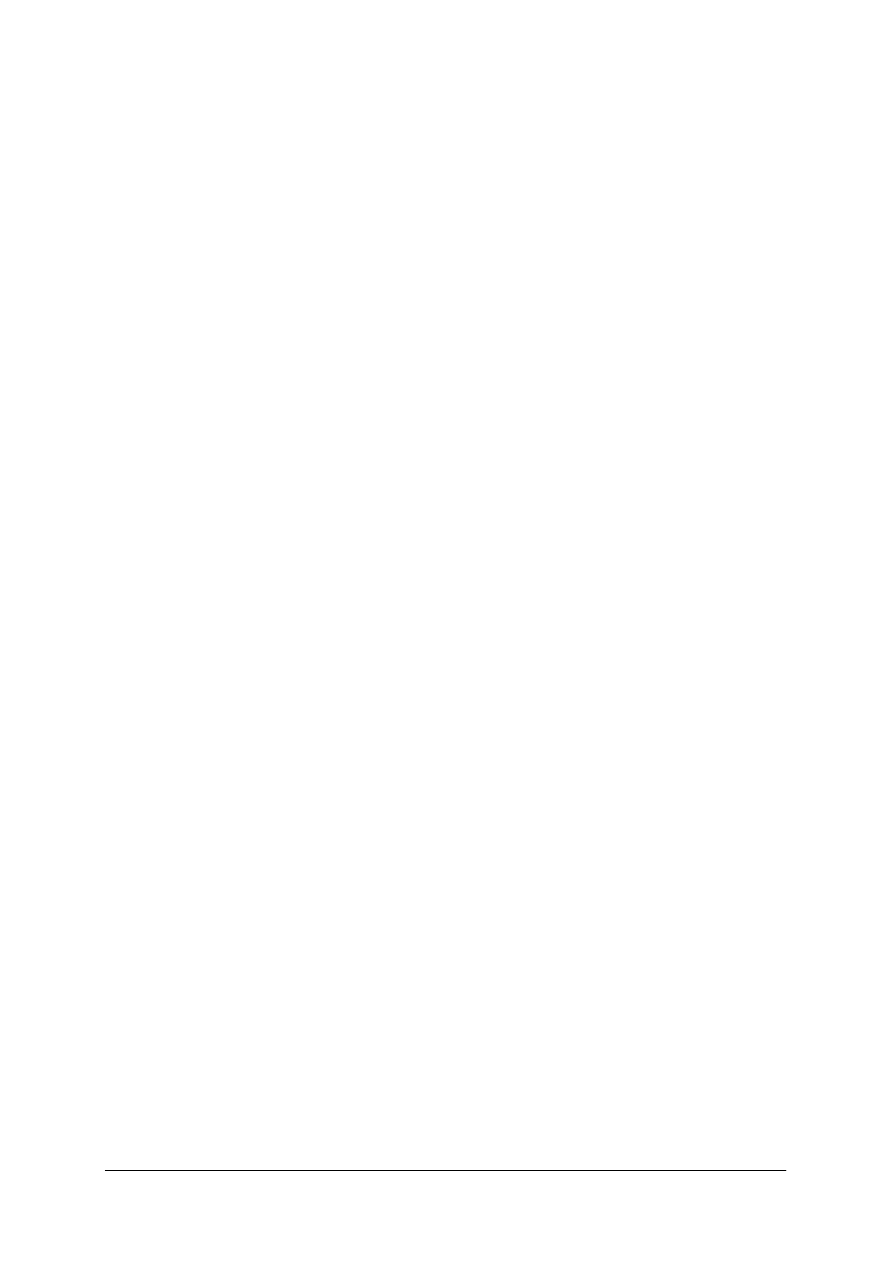
Schemat układu jednostek modułowych w module
314[03].O2
Układy sterowania i regulacji
314[03].O2.01
Użytkowanie układów elektrycznych
i elektronicznych
314[03].O2.02
Użytkowanie układów automatyki
okrętowej

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
korzystać z różnych źródeł informacji,
−
stosować przepisy prawne dotyczące pracownika i pracodawcy w zakresie bezpieczeństwa
i higieny pracy,
−
stosować podstawowe zasady higieny i fizjologii pracy,
−
organizować bezpieczne i ergonomiczne stanowisko pracy,
−
dokonywać oceny ryzyka zawodowego na stanowisku pracy,
−
dobierać i stosować odzież ochronną oraz środki ochrony indywidualnej w zależności od
wykonywanych prac,
−
stosować procedury udzielania pierwszej pomocy w stanach zagrożenia zdrowia i życia,
−
stosować zasady bezpiecznej obsługi maszyn i urządzeń okrętowych,
−
stosować zasady ochrony środowiska,
−
korzystać z Polskich Norm, Kodeksu pracy oraz rozporządzeń dotyczących
bezpieczeństwa i higieny pracy oraz ochrony środowiska.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
wyjaśnić różnicę między sterowaniem a regulacją,
−
rozróżnić elementy układu automatycznej regulacji oraz określić ich funkcje w układzie,
−
sklasyfikować układy automatycznej regulacji,
−
określić zastosowanie regulatorów liniowych i nieliniowych,
−
sprawdzić poprawność działania regulatorów w siłowni okrętowej,
−
rozpoznać przetworniki sygnałów oraz układy formowania i przesyłania sygnałów,
−
dobrać przetworniki do pomiaru wielkości nieelektrycznych,
−
zmierzyć wielkości nieelektryczne,
−
rozpoznać cyfrowe, analogowe, elektroniczne, pneumatyczne, hydrauliczne regulatory
i sterowniki okrętowe,
−
sterować pracą okrętowych silników spalinowych,
−
sterować ręcznie układami regulacji,
−
obsłużyć zdalne i automatyczne układy regulacji,
−
przestrzegać zasad prawidłowej eksploatacji układów automatyki okrętowej,
−
zastosować przepisy bezpieczeństwa i higieny pracy oraz ochrony środowiska.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Podstawy teorii sterowania i regulacji
4.1.1. Materiał nauczania
Układy automatyki
Automatyka jest to dyscyplina naukowa zajmująca się teorią i praktycznym zastosowaniem
urządzeń sterujących procesami bez udziału człowieka lub z jego ograniczonym udziałem.
Automatyzacja jest to zjawisko wprowadzania do produkcji przemysłowej, komunikacji,
transportu środków technicznych i urządzeń automatycznych działających na zasadzie
samoregulacji i pracujących bez bezpośredniego udziału człowieka.
Do podstawowych układów regulacji należy układ z zamkniętą pętlą sprzężenia zwrotnego
(rys. 1). W przypadku gdy sygnał błędu
ε
=0 (
ε
= z – u), to na obiekt nie oddziałuje żadne inne
sygnały poza sygnałami zakłócającymi. Jeżeli pojawi się niezerowy sygnał błędu
ε
, wówczas w
obiekcie zachodzą zmiany, które doprowadzają w czasie obiekt ponownie do stanu
równowagi.
Rys. 1. Zamknięty układ regulacji: O – obiekt, R – regulator, P – układ porównujący, S – element sumujący
Element porównujący P oblicza różnicę między wartością sygnału zadanego z a wartością
sygnału wyjściowego y otrzymaną z układu pomiarowego poprzez ujemne sprzężenie zwrotne.
Na wyjściu elementu porównującego otrzymujemy sygnał uchybu
ε. W dobrze
zaprojektowanym układzie regulacji wartość uchybu w stanie nieustalonym powinna być jak
najmniejsza (przeregulowanie), natomiast w stanie ustalonym powinna być równa 0 (uchyb
ustalony). Sygnał z elementu porównującego jest następnie przekazywany do elementu
wykonawczego, który w odpowiedni sposób oddziałuje na obiekt. Dodatkowo na regulowany
obiekt działać mogą zakłócenia.
Układy regulacji z zamkniętą pętlą sprzężenia zwrotnego ze względu na sposób działania
dzielimy na:
−
układy stabilizacji – w procesie regulacji mają za zadanie utrzymać stałą w czasie wartość
wielkości wyjściowej mimo zmian wielkości wejściowej i działających na układ zakłóceń
(np. układ regulujący zanurzenie jednostki pływającej),
−
układy śledzące (nadążne) – działają w taki sposób, aby sygnał wielkości wyjściowej
nadążał za zmianami wielkości wejściowej. Zmiany sygnałów wejściowych nie są znane
ani przewidywalne: są losową funkcją czasu. Układy te są również nazywanie
O
R
sygnał
zadany
w
sygnał
błędu
ε
sygnał
wyjściowy
y
sygnał
sterujący
u
sygnał
zakłócający
z
P
S

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
serwomechanizmami (np. układ utrzymania kursu jednostki mimo zmiennych kierunków
wiatrów i prądów morskich),
−
układy programowalne – są odmianą układów śledzących z tą różnicą, że sygnał
wejściowy jest z góry określoną funkcją czasu,
−
układy optymalne – struktura i parametry regulatora określone są na podstawie
obliczonego ekstremum przyjętego wskaźnika jakości. Przykładem takiego układu może
być układ sterowania silników tak, aby jednostka pływająca osiągnęła jak najwyższą
prędkość,
−
układy przełączające – regulacja odbywa się na zasadzie załączania lub wyłączania
odpowiednich urządzeń procesu w odpowiedniej kolejności (sekwencji), a rolę regulatora
pełni najczęściej układ logiczny (np. układ załączania oświetlenia).
W układach automatyki można wyróżnić następujące elementy:
−
regulatory – układy które na podstawie wartość sygnału błędu oraz analizy historii jego
zmian ustalają sygnał sterujący,
−
czujniki pomiarowe – których zadaniem jest przetworzyć wartość regulowaną na
standaryzowany sygnał elektryczny lub pneumatyczny, który będzie porównywany
z wartością zadaną,
−
elementy wykonawcze – które na podstawie sygnałów sterujących dokonują zmiany
wartości wyjściowej (np. w przypadku regulacji temperatury grzałka zasilana napięciem
sterującym ogrzewa obiekt),
−
układy standaryzujące – które skalują przesyłane sygnały do wartości znormalizowanych.
Rodzaj regulacji zależy od typu regulatora. Regulatory możemy podzielić według kilku
niezależnych kryteriów:
−
rodzaju sygnału wyjściowego – regulatory ciągłe, krokowe, impulsowe,
−
rodzaju funkcji przejścia – regulatory P, PI, PD, PID,
−
technologii wykonania – regulatory analogowe i cyfrowe.
Regulatory P, PI, PD i PID
Procesy technologiczne stosowane w rozmaitych dziedzinach techniki były stopniowo
obejmowane automatyzacją. Zebrane doświadczenia doprowadziły do opracowania kilku
odmian regulatorów przystosowanych do bardzo szerokiego zakresu zastosowań. Nie
będziemy omawiać szczegółowo budowy regulatorów, ograniczymy się do prezentacji
schematów blokowych najczęściej stosowanych regulatorów. Regulator na ogół składa się z 3
bloków funkcjonalnych:
−
członu proporcjonalnego,
−
członu całkującego,
−
członu różniczkującego.
Człon proporcjonalny działa jak wzmacniacz. Człon całkujący generuje sygnał narastający,
gdy sygnał wejściowy ε jest dodatni, a maleje, gdy sygnał wejściowy jest ujemny. Zaś człon
różniczkujący generuje sygnał dodatni, gdy sygnał wejściowy narasta, a ujemny, gdy sygnał
wejściowy maleje. Spotyka się cztery typowe odmiany regulatorów:
−
regulator typu P o działaniu proporcjonalnym,
−
regulator typu PI o działaniu proporcjonalno – całkującym,
−
regulator typu PD o działaniu proporcjonalno – różniczkującym,
−
regulator typu PID o działaniu proporcjonalno – całkująco – różniczkującym.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Rys. 2. Schemat układu regulacji procesu przemysłowego z wyodrębnieniem
typowych składników układu
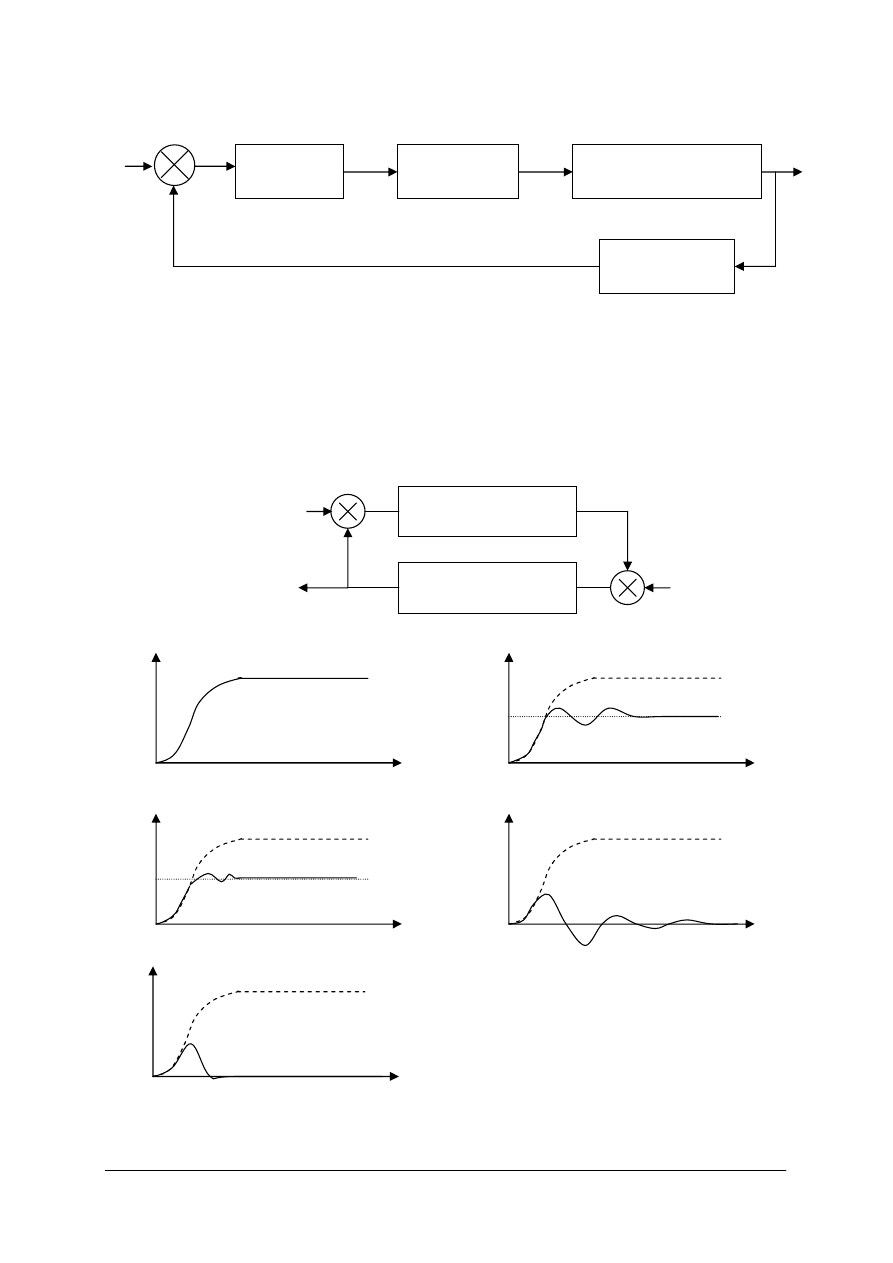
Efekt wprowadzenia członów dynamicznych „I” oraz „D” formujących sygnał regulatora
zilustrowano na rys. 3. W układzie zamkniętym sterowaniu (rys. 3a) poddany jest proces,
którego właściwości dynamiczne wyrażone są za pomocą odpowiedzi skokowej. Na proces
oddziałują zakłócenia „z”.
Rys. 3. Wpływ członów dynamicznych regulatora na
tłumienie zakłóceń i właściwości dynamiczne
układu regulacji: a) schemat układu regulacji;
b) odpowiedź skokowa obiektu; c) z regulatorem
typu P, d) z regulatorem, typu PD, e) z
regulatorem typu PI, f) z regulatorem typu PID [9]
Układ
formujący
Urządzenie
wykonawcze
OBIEKT
– proces technologiczny
Urządzenie
pomiarowe
Sygnał
zadany
Sygnał
wyjściowy
t
y
0
b)
t
y
0
c)
y
o
Regulator P
t
y
0
d)
y
o
Regulator PD
t
y
0
e)
Regulator PI
t
y
0
f)
Regulator PID
Reguator
Obiekt
sygnał
zadany
y
o
wartość
wyjściowa
y
sygnał
sterowania
u
sygnał
zakłócający
z
a)
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Na rys. 3 c, e, g, i można dostrzec efekt tłumienia zakłóceń przez układ regulacji (linią
kreskową zaznaczono przebieg odpowiedzi procesu w układzie otwartym. Porównanie
odpowiedzi układu regulacji na skok zakłóceń i na skok wartości zadanej przy różnych
wariantach układów formujących prowadzi do następujących wniosków:
Działanie
całkujące
regulatora
odpowiada
za
duże
wzmocnienie
sygnałów
wolnozmiennych. Wartość sterująca w regulatorach PI oraz PID znacząco wzrasta przy długim
czasie trwania błędu wolnozmiennego. Efekt ten jest nieosiągalny dla regulatora typu P i PD.
Działanie różniczkujące sprawia, że regulator reaguje na szybkie zmiany błędu,
a dokładniej mówiąc na szybkość i kierunek jej zmian. Regulatory typu PD i PID zatem badają
nie tylko aktualną wartość, ale i przewidywany w najbliższym czasie przebieg błędu, może
więc dzięki temu wcześniej niż regulator typu P lub PI zmieniać we właściwy sposób sygnał
sterujący. Dzięki temu odchyłka regulacji szybciej się zmniejsza i w ogóle zakłócenia
szybkozmienne są lepiej tłumione.
Działanie układów regulacji z omawianymi regulatorami zależy od doboru parametrów
tych regulatorów. Właściwości regulatorów określają trzy parametry:
−
wzmocnienie
Kp
,
−
stała czasowa całkowania T
i
,
−
stała czasowa różniczkowania T
d
,
Parametry T
i
oraz T
d
mają miano czasu. Zamiast wzmocnienia K
p
operuje się zazwyczaj
jego odwrotnością zwaną zakresem proporcjonalności i wyrażaną w procentach:
p
K
1
=
χ
.
Nazwa „zakres proporcjonalności” odnosi się do dopuszczalnego zakresu zmian sygnału
wejściowego, któremu odpowiada zmiana sygnału wzmocnionego w pełnym zakresie.
Przekroczenie zakresu proporcjonalności powoduje nieprawidłową pracę wzmacniacza
(wejście w nasycenie).
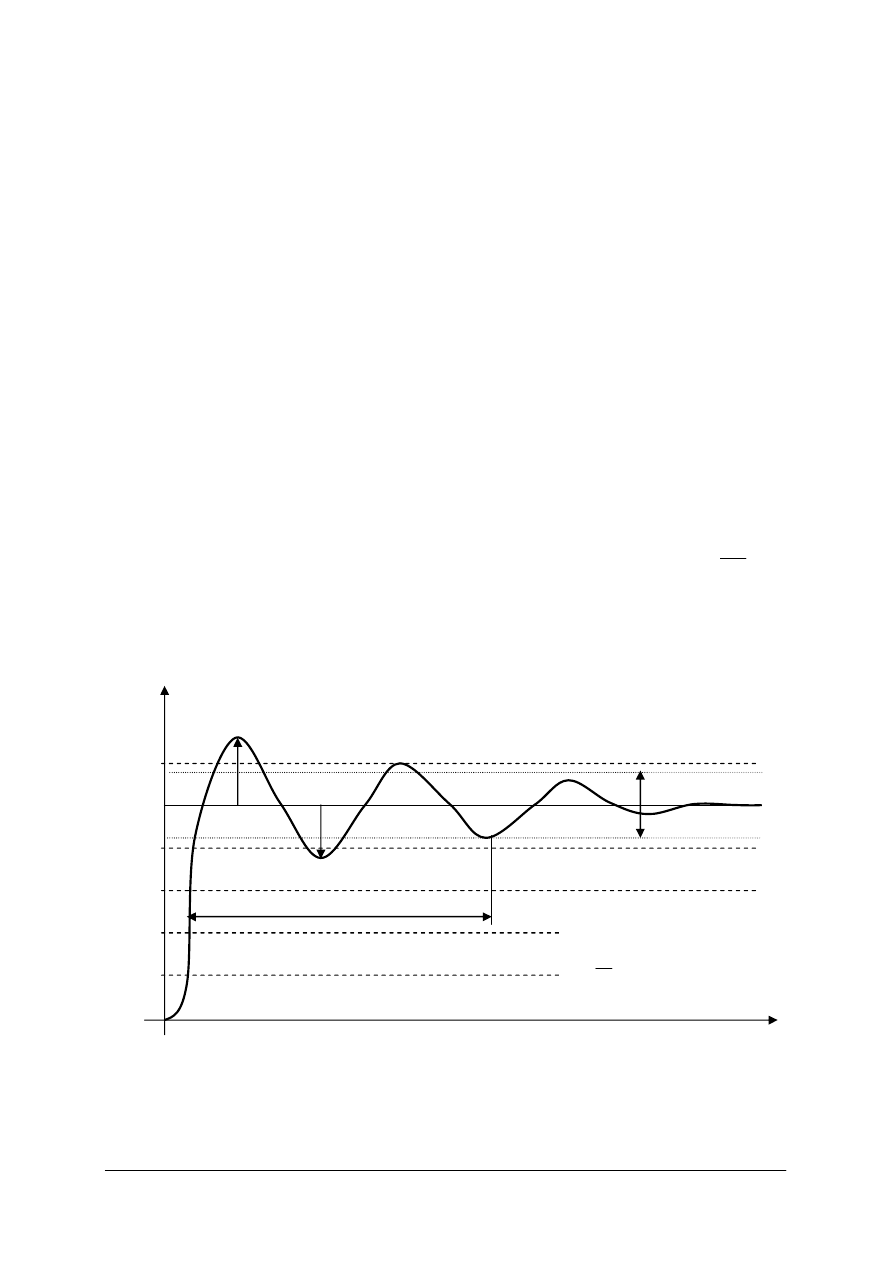
Rys. 4.
Ilustracja pojęć czasu regulacji t
r
(b) i przeregulowania ε
Parametr T
i
określający „intensywność” działania całkującego nazywany jest czasem
zdwojenia. Czas zdwojenia jest równy czasowi, po jakim odpowiedź członu całkującego na
skokową zmianę sygnału e od wartości zerowej staje się równa sygnałowi e, a tym samym
t
r –
czas regulacji
Dopuszczalna odchyłka
regulacji ε
A
1
A
2
t
y
Przeregulowanie
%
100
1
2
×
=
A
A
χ
y
o
t
o

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
sygnał wyjściowy regulatora PI podwaja się w stosunku do swojej wartości początkowej.
Parametr T
d
określający proporcję, z jaką uwzględnia się działanie różniczkujące
w regulatorze, zwany jest czasem wyprzedzenia. Czas wyprzedzenia T
d
jest równy czasowi, po
jakim liniowo narastający sygnał wejściowy zrówna się z sygnałem wyjściowym członu
różniczkującego.
Przed projektantem układu regulacji staje problem wyboru typu regulatora oraz doboru
jego nastaw. Pierwszym nadrzędnym kryterium doboru nastaw jest warunek stabilności układu,
niezależnie od wielkości błędów zakłócających.
Cel ten można jednak zazwyczaj osiągnąć przy każdym z wymienionych typów
regulatorów. Typ regulatora dobiera się więc ze względu na inne właściwości układu regulacji.
Właściwościami takimi są np. wartość odchyłki statycznej w zależności od wartości zadanej
oraz w zależności od zakłóceń, tłumienie zakłóceń w zależności od szybkości ich zmian
(częstotliwości), szybkość regulacji i dokładność nadążania za zmianami wartości zadanej.
Czas regulacji t
r
jest to czas, jaki upływa od chwili podania na wejście układu sygnału
skokowego (t
0
)
do chwili, w której wartość regulowana mieści się w dopuszczalnej odchyłce
regulacji ε. Czas regulacji powinien być jak najkrótszy.
Sposób dochodzenia do wartości ustalonej w odpowiedzi na skokową zmianę sygnału
charakteryzowany jest za pomocą przeregulowania:
1
2
A
A
=
χ
100%
gdzie: A
1
i A
2
– są to dwie kolejne amplitudy wahnięć sygnału wyjściowego.
W procesie regulacji należy tak dobrać parametry regulacji by przeregulowanie było jak
najmniejsze.
Zastosowanie takich skomplikowanych struktur regulatorów PID zapewnia dobre
parametry regulacji (przeregulowanie, czas regulacji, itp.). Zastosowanie członów D i I
powodują kilkakrotne skrócenie czasu regulacji. Jednak człon I wprowadza pewne oscylacje.
Ocena przydatności danego typu regulatora, jeśli miałaby opierać się na odpowiedziach
skokowych układu regulacji, wymagałaby porównania odpowiedzi otrzymanych przy różnych
wartościach nastaw.
Dobór nastaw regulatorów metodą Zieglera–Nicholsa
Zapewnienie dobrych parametrów w przemysłowych układach regulacji jest często trudne.
Opracowano kilka metod doboru nastaw regulatorów. Do najczęściej stosowanych zalicza się
metoda Zieglera–Nicholsa.
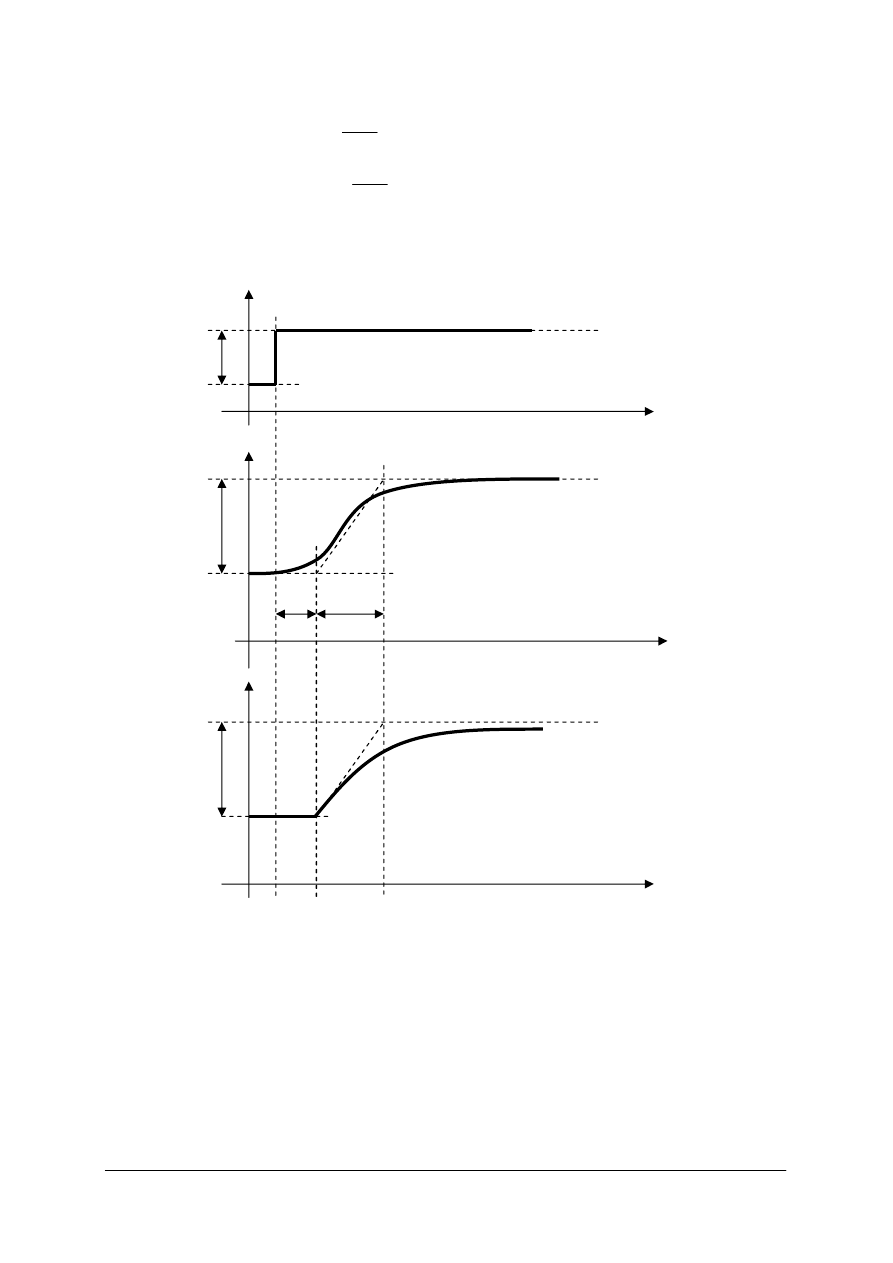
Procedura doboru nastaw rozpoczyna się od zbudowania układu z otwartą pętlą
sprzężenia zwrotnego, uruchomienia układu (przy wyłączonych członach I i D) i podania na
wejście regulatora sygnału skoku jednostkowego (rys. 5a). W trakcie pracy układu rejestruje
się zmiany wartości wyjściowej y. Faza ta trwa do czasu ustabilizowania się sygnału wartości
wyjściowej. Na podstawie wykonanych pomiarów wykreśla się charakterystyką y = f(t)
(rys. 5b). Z otrzymanego przebiegu należy odczytać trzy parametry: T
z
, T
m
, K.
Czas ustalania się T
m
jest to czas, jaki upływa od chwili t
0
podania na wejście układu
sygnału skokowego do chwili, od której począwszy różnica między wielkością wyjściową
(regulowaną) y, a jej wartością ustaloną y
ust
nie przekracza określonej części różnicy ε między
nową wartością ustaloną y
ust
a wartością ustaloną przed podaniem sygnału skokowego y(t
0
).
Przeregulowanie K określa się dla odpowiedzi na skokową zmianę zakłóceń K = Δy/Δu.
dla regulatora typu P:
m
z
p
KT
T
K
7
,
0
=
,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
dla regulatora typu PI:
m
z
p
KT
T
K
7
,
0
=
,
z
m
i
T
T
T
37
,
0
+
=
dla regulatora typu PID:
m
z
p
KT
T
K
2
,
1
=
,
m
i
T
T
×
=
2
,
m
d
T
T
×
=
4
,
0
Takie parametry zapewniają osiągnięcie najkrótszego czasu regulacji przy przeregulowaniu
wynoszącym ok. 20%.
Rys. 5. Wyznaczanie K, Tz i Tm do wyznaczania doboru nastaw metodą Nequista: a) sygnał skoku
jednostkowego podawanego na wejście układu z otwarta pętlą sprzężenia zwrotnego, b) wykreślona
charakterystyka przykładowego sygnału wartości wyjściowej y = f(t) z naniesionymi stycznymi do
przebiegu, c) przewidywany sygnał wyjściowy układu z zamkniętą pętla sprzężenia zwrotnego
z zastosowanymi nastawami
t
t
t
y
y
u
T
m
T
z
t
o
t
o
+T
m
t
o
+T
m
+T
z
Δy
Δy
Δu
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Regulacja dwustawna
Określenie regulacja dwustawna lub dwupołożeniowa odnosi się do postaci sygnału
sterującego, który może przyjmować dwie wartości (w danym czasie jedną z dwóch). Sygnał
sterujący służy zazwyczaj do oddziaływania na przepływ energii elektrycznej.
Układem regulacji dwustawnej jest np. układ regulacji temperatury wody w bojlerze
elektrycznym, w którym przez element bimetalowy i przez grzałkę przerywa przepływa prąd.
Grzałka powoduje wzrost temperatury grzanej wody. W momencie gdy woda osiągnie
odpowiednią temperaturę termobimetal rozwiera się i przerywa przepływ prądu przez grzałkę.
Sygnał sterujący przyjmuje tu dwie wartości (załącz i wyłącz) odpowiadające grzaniu
i stygnięciu wody.
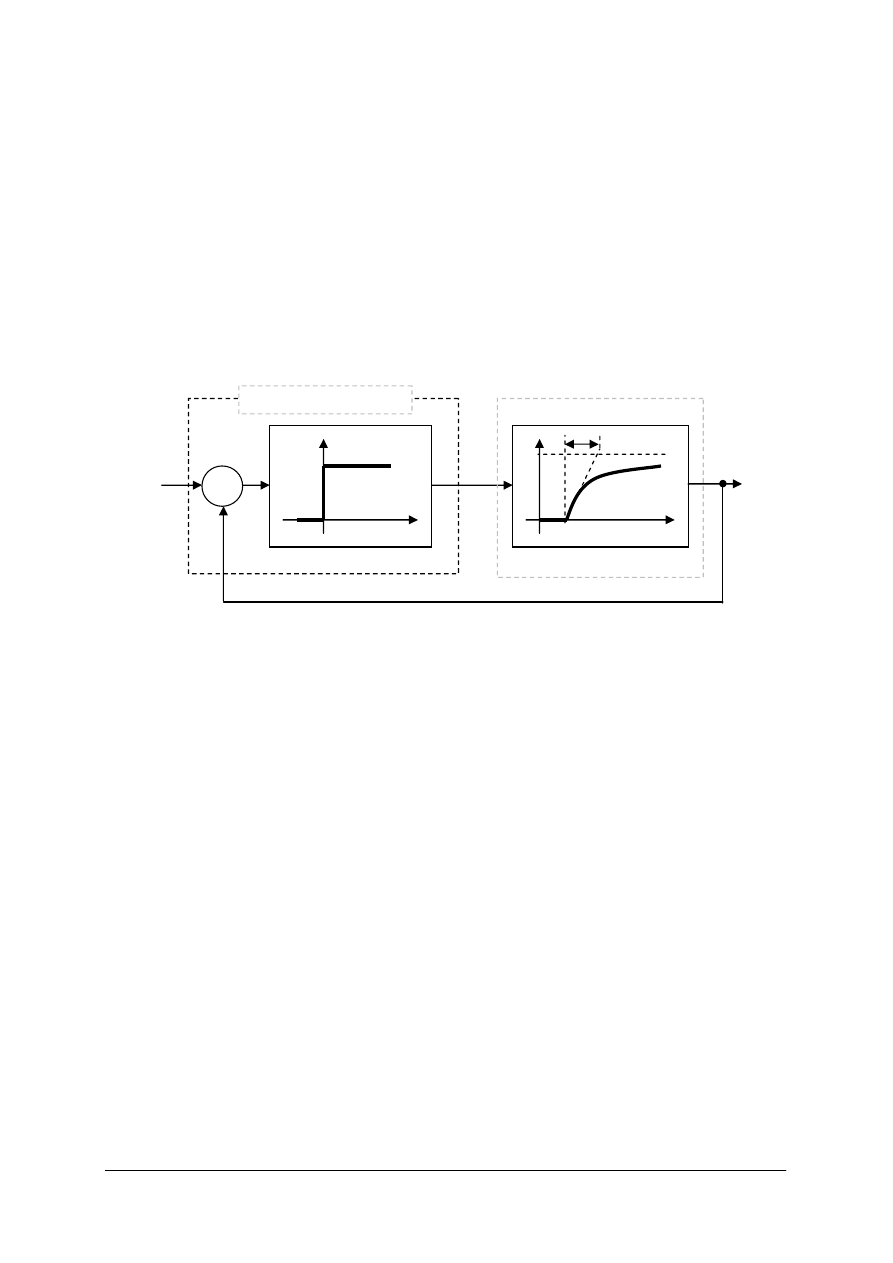
Rzeczywiste obiekty cieplne wykazują pewne właściwości nieliniowe. Strukturę typowego
układu regulacji dwustawnej przedstawiono na rys. 6.
Rys. 6.
Układ dwustawnej regulacji temperatury
Sygnał sterujący u przyjmuje dwie wartości: u = 1 odpowiadającą grzaniu obiektu i u = 0
odpowiadającą stygnięciu obiektu. Regulator nadaje sygnałowi sterującemu wartość u = 1, gdy
odchyłka regulacji jest dodatnia, tzn. gdy temperatura obiektu wyrażona zmienną y jest niższa
od temperatury zadanej (zmienna y
0
), a wartość 0, gdy odchyłka regulacji jest ujemna.
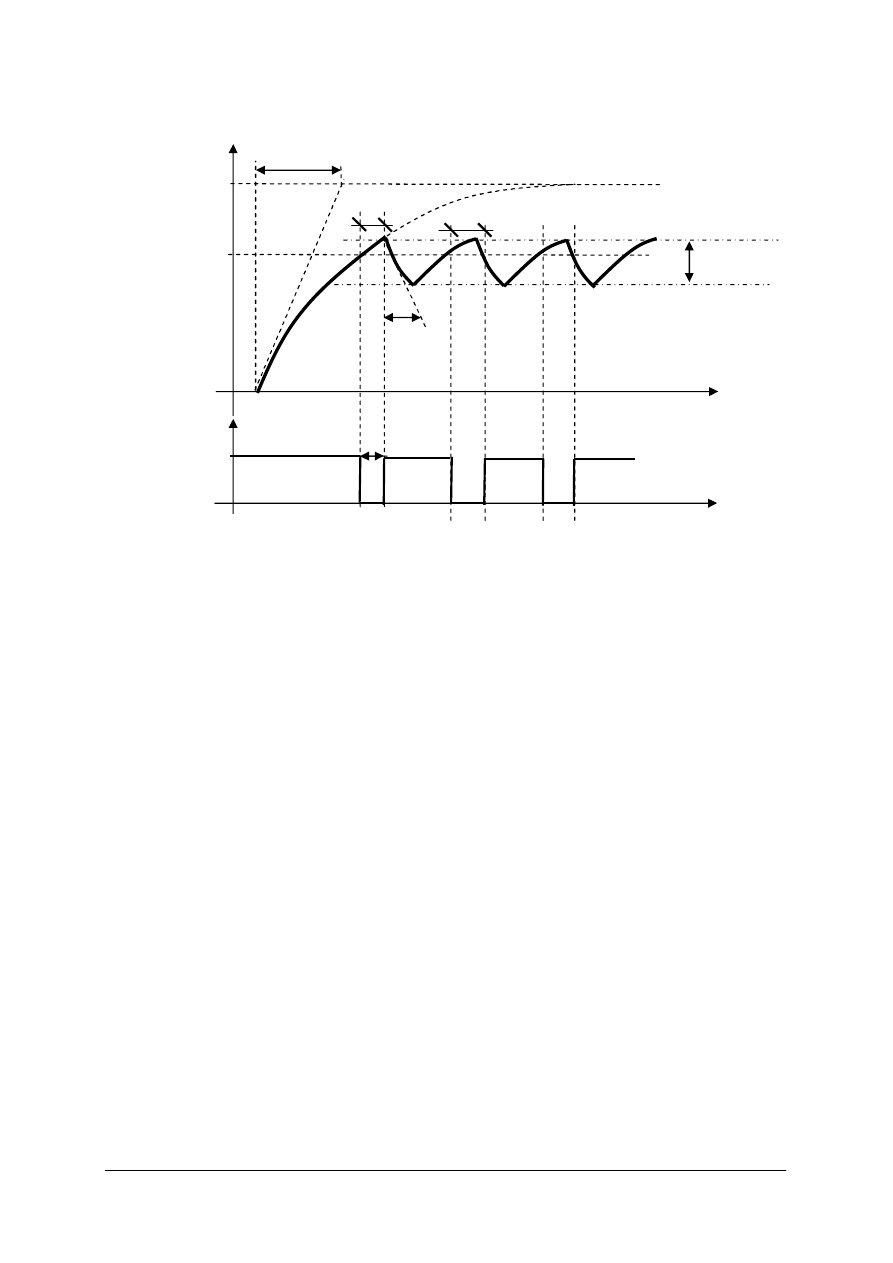
Obiekt reaguje na zmianę sterowania z opóźnieniem (rys. 7): po wyłączeniu grzania
temperatura obiektu wzrasta jeszcze przez czas T
m
i dopiero po tym czasie zaczyna się
zmniejszać. Podobnie po ponownym włączeniu grzania (w chwili gdy temperatura – sygnał y
zmniejszy się poniżej wartości y
0
) temperatura zmniejsza się jeszcze przez czas T
m
i dopiero po
tym czasie zaczyna się zwiększać.
Temperatura obiektu nie ustala się, lecz oscyluje wokół wartości zadanej y
0
. Amplituda
oscylacji i ich okres jest stały (pomijając początek przebiegu). Oscylacje świadczą
o niestabilności układu regulacji, niemniej nie dyskwalifikują go do zastosowań praktycznych,
ponieważ w praktyce ograniczone wahania temperatury wokół wartości zadanej zazwyczaj
można uznać za dopuszczalne, jeżeli tylko ich amplituda jest dostatecznie mała.
Amplituda oscylacji temperatury zależy od stałych czasowych T
m
i T
z
. Im większy jest czas
opóźnienia T
m
, tym dłużej temperatura obiektu wzrasta po wyłączeniu grzania i tym dłużej
zmniejsza się po włączeniu, a więc tym większa jest amplituda oscylacji. Im większa jest
bezwładność obiektu (stała czasowa inercji), tym wolniej zmienia się temperatura obiektu, a
więc tym mniejsza jest amplituda oscylacji.
Wartość (liczbowa) stosunku stałych czasowych T
m
i T
z
wynosi typowo 0,01
÷
0,1 dla
małych pieców, a sięga 0,5 dla pomieszczeń.
y
o
ε
0
1
u
T
i
y
Regulator
Obiekt
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
Rys. 7.
Przebieg temperatury w regulacji dwustawnej
Układy regulacji trójstawnej
Regulatory trójstawne (trzypołożeniowe) charakteryzują się sygnałem wyjściowym
mogącym przyjmować trzy wartości. Produkowane są m. in. trójstawne regulatory
temperatury, w których sygnały sterujące przyjmują trzy wartości odpowiadające działaniom:
grzanie, grzanie i chłodzenie wyłączone, chłodzenie. Regulatory takie są wyposażone
w korekcyjne sprzężenie zwrotne zmniejszające amplitudę drgań i nadające im cechy
regulatorów typu PD lub PID.
Regulatory trójstawne stosuje się często w połączeniu z silnikami elektrycznymi jako
urządzeniami wykonawczymi, służącymi np. do przestawiania zaworów. Sygnały sterujące
regulatora odpowiadają wtedy włączeniu silnika 1, wyłączeniu 0 oraz włączeniu silnika
w przeciwnym kierunku wirowania –1 . W przeciwieństwie do regulacji dwustawnej możliwe
jest pozostawanie silnika w bezruchu. Silnik sterowany jest impulsami +1 i –1 , o czasie
trwania zależnym od wartości odchyłki, poprzedzielanymi okresami wyłączenia 0. Silnik
wykonuje jak gdyby kroki; stąd pochodzi stosowana nazwa tych regulatorów – regulatory
krokowe.
Przy dużych stałych czasowych obiektów regulatory krokowe zapewniają jakość regulacji
podobną do osiąganej przez analogiczne regulatory typu ciągłego.
Złożone układy regulacji
Omawiane dotychczas układy miały zazwyczaj prostą strukturę jednopętlową. Często
układy stosowane w praktyce są niekiedy znacznie bardziej rozbudowane.
Proste układy regulacji mogą wchodzić w skład innych układów sterowania lub regulacji.
W szczególności serwomechanizmy pełnią często pomocniczą rolę „wewnątrz” innych
układów, służąc np. do ustawiania w odpowiednim położeniu zaworów dławiących strumień
czynnika stanowiącego wielkość sterującą obiektu; sygnałem zadanym dla tych
serwomechanizmów może być sygnał wyjściowy regulatora „głównego”.
T
z
T
m
T
m
T
m
y
y
o
y
m
T
m
t
t
0
0
1
u
H
ε
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
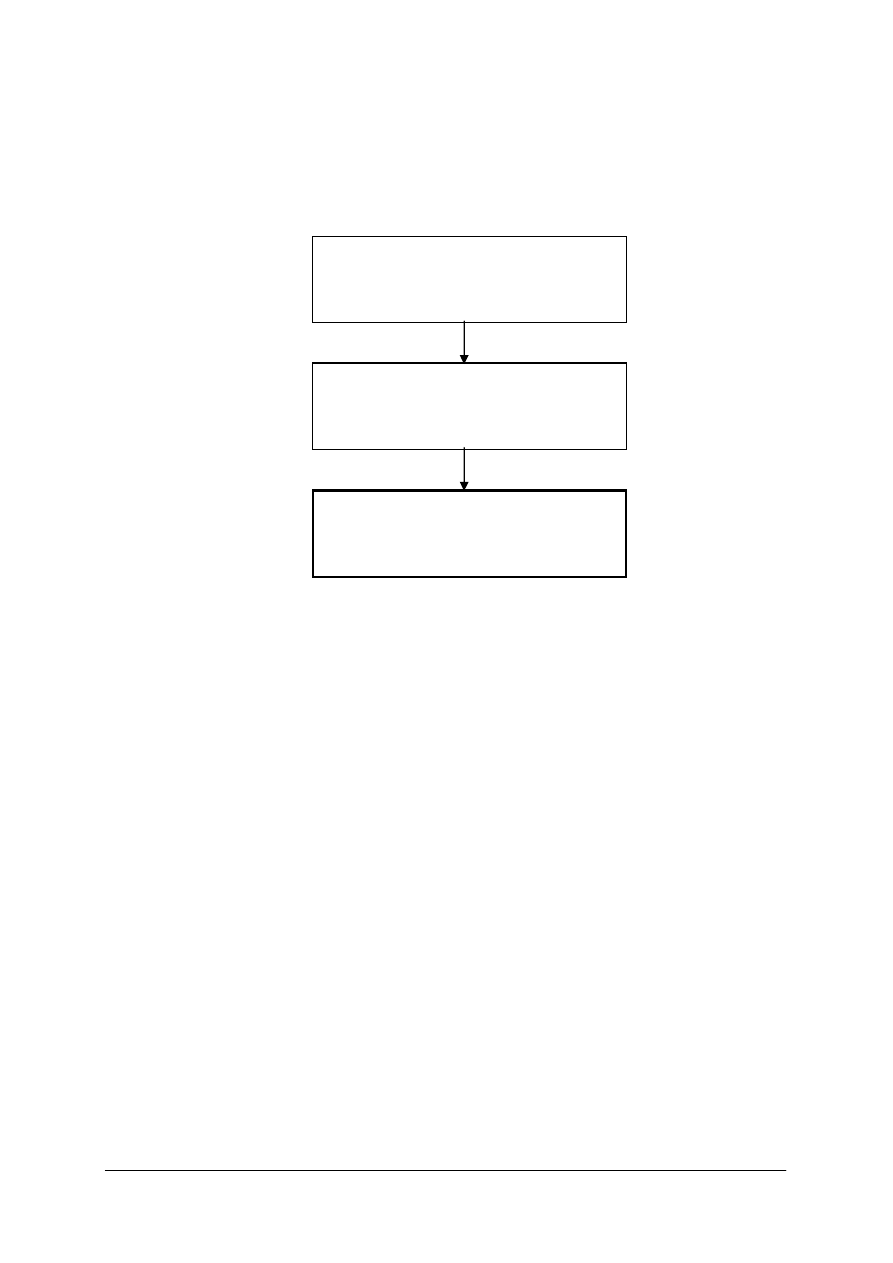
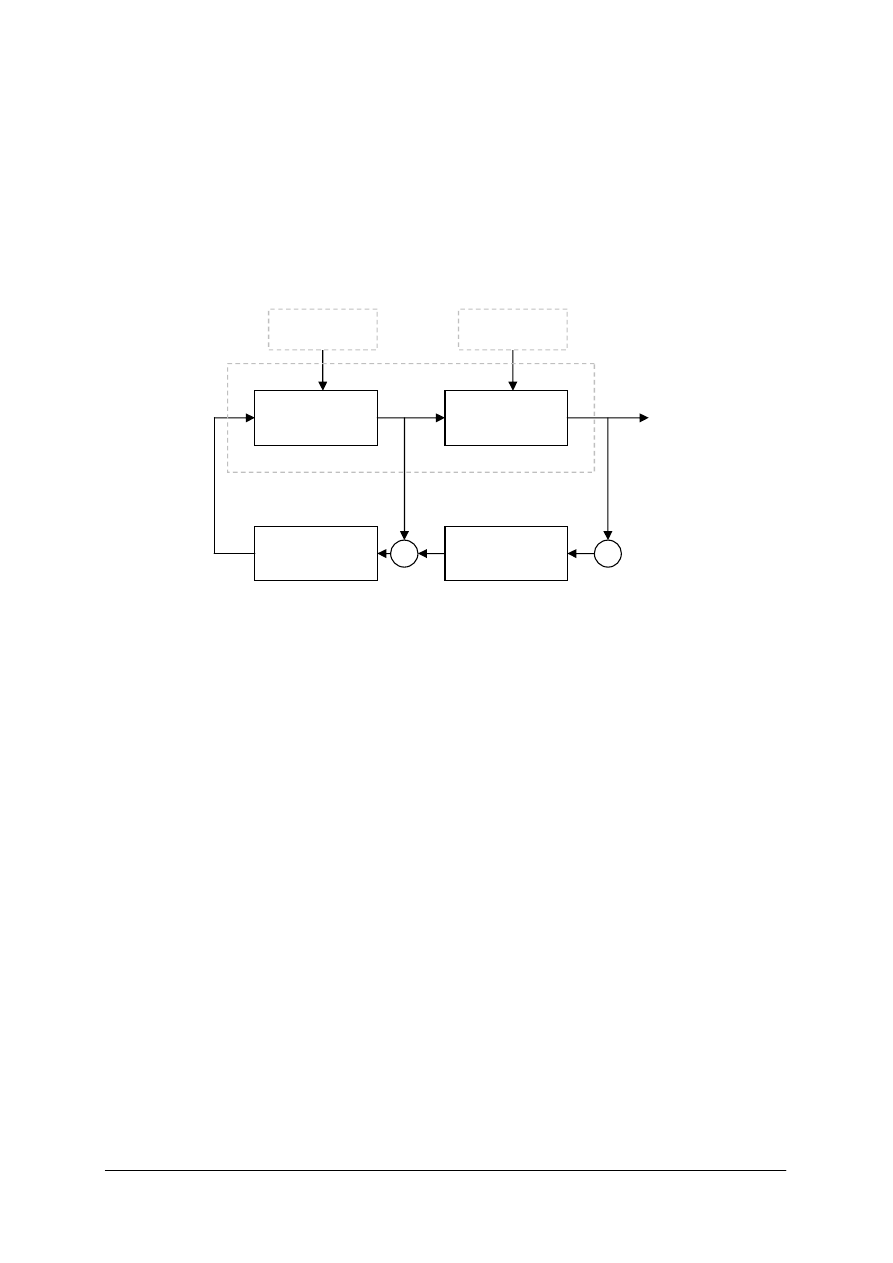
Sytuacja, w której sygnał wyjściowy jednego regulatora stanowi sygnał zadany dla innego
regulatora (układu regulacji), występuje także w tzw. kaskadowych układach regulacji (rys. 9).
Układy takie stosuje się, gdy w obiekcie regulacji udaje się wyodrębnić i zmierzyć wielkość
pomocniczą y
1
uzależnioną od części zakłóceń Z
1
oddziałujących na obiekt i dających
informację o tych zakłóceniach wcześniej niż wielkość regulowana y (np. gdy właściwości
opóźniające wykazuje głównie druga część obiektu). Pomocniczy układ regulacji obejmujący
część I obiektu może wytłumić zakłócenia Z
1
znacznie lepiej niż uczyniłby to jednopętlowy
układ regulacji zmiennej y. Co więcej, zakłócenia Z
2
także mogą być dzięki temu nieco lepiej
wytłumione.
Rys. 8.
Struktury układów regulacji kaskadowej
Tłumienie zakłóceń stanowi zasadniczy cel wielu układów regulacji (i sterowania)
procesów technologicznych. Realizowane jest ono w rozmaitych strukturach, począwszy od
najprostszej. Układ regulacji kaskadowej (rys. 8) umożliwia uniezależnienie się od zmian
samego napięcia zasilania. Regulator pomocniczy reaguje na zmiany napięcia zasilania układu
regulacji. Regulator główny natomiast odpowiada za kompensację zakłóceń bezpośrednio
oddziałujących na regulowany parametr.
Czujniki i przetworniki pomiarowe
Urządzenie pomiarowe składa się z:
–
czujnika pomiarowego, zamieniającego wielkość mierzoną na wielkość pośredniczącą,
np. poziom cieczy na napięcie elektryczne lub na przesunięcie,
–
przetwornika lub kilku przetworników, zamieniającego daną wielkość pośredniczącą na
sygnał o wymaganej postaci.
Wielkości pośredniczących jest stosunkowo mało, znacznie mniej niż wielkości
mierzonych. Jako wielkości pośredniczących używa się zazwyczaj napięcia, prądu, rezystancji,
częstotliwości, impulsów, rzadziej przesunięcia liniowego i kątowego. Zatem przy bardzo dużej
ilości czujników pomiarowych, mamy zacznie mniej układów pośredniczących.
Konstrukcja przetworników pomiarowych jest dostosowana do postaci i zakresu sygnału
wyjściowego, który musi odpowiadać wymaganiom konkretnego urządzenia sterującego
(np. regulatora) lub standardu aparatury.
Część I
Część II
Zakłócenie Z
1
Zakłócenie Z
2
Regulator
pomocniczy
Regulator
główny
Obiekt
wielkość
regulowana
y
pomocnicza wartość
regulowana y
1

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Wejście przetwornika jest zazwyczaj do pewnego stopnia uniwersalne, by umożliwić
współpracę z różnymi czujnikami; np. możliwa jest zmiana zakresu sygnału wejściowego
przetwornika.
Niektóre regulatory umożliwiają bezpośrednie dołączanie czujników określonego rodzaju,
np. regulatory temperatury – termoelementów i termorezystorów. Zdarza się też, że czujnik
wykonywany jest łącznie z przetwornikiem pomiarowym.
Właściwości dynamiczne urządzeń pomiarowych często są zaniedbywane, ponieważ
zazwyczaj dominujące znaczenie mają właściwości dynamiczne innych elementów układu
sterowania (obiektu i regulatora). Należy jednak zdawać sobie sprawę, że właściwości
dynamiczne czujnika i przetwornika mogą się ujawnić, np. przy zastąpieniu urządzenia
pomiarowego innym, o gorszych właściwościach dynamicznych. Efektem takiej zamiany może
być pogorszenie właściwości dynamicznych całego układu regulacji.
Właściwości dynamiczne urządzeń pomiarowych charakteryzuje się podając pewne parametry
czasowe związane z ustalaniem się sygnału wyjściowego po skokowej zmianie sygnału
wejściowego lub parametry częstotliwościowe odnoszące się do charakterystyki częstotliwościowej
modułu (częstotliwość graniczna) bądź przesunięcia fazowego.
Takie szczegółowe określanie dokładności dotyczy czujników i przetworników służących
do pomiaru wielkości ciągłych. Wprawdzie wynik pomiaru może przybierać postać dyskretną,
np. częstotliwości impulsów (wielkość pośrednicząca), ale błąd dyskretyzacji może być dostatecznie
mały, by mieścił się w klasie dokładności.
Niekiedy zadaniem czujnika nie jest dokonywanie pomiaru, ale rozróżnianie dwóch
sytuacji w rodzaju: przed drzwiami stoi człowiek (nie stoi), winda jest przeciążona (nie jest),
przenośnik linii galwanizerskiej znajduje się dokładnie nad wanną (niedokładnie – nie może
wykonywać ruchów pionowych), temperatura, prąd, poziom przekroczyły wartość graniczną
(nie przekroczyły) itd. Informacje takie mogą być wykorzystane do sterowania (otwierania
drzwi), sygnalizacji (przekroczenia temperatury), zabezpieczeń, blokad itd. Do tego rodzaju
zadań stosuje się zarówno czujniki przystosowane wyłącznie do rozróżniania dwóch sytuacji,
np. wyłącznik naciskowy załączany, gdy nacisk podłogi windy jest dostatecznie duży, jak
i ciągłe układy pomiarowe, których sygnały wyjściowe są następnie przetwarzane w celu
otrzymania informacji, np. sygnalizowania przekroczenia wartości granicznych przez sygnał
wejściowy (ciągły) regulatora. Wiele układów pomiarowych ma charakter mieszany, czujnik
o charakterystyce ciągłej, np. fotodioda, może być połączony z dyskryminatorem (urządzeniem
przetwarzającym sygnały analogowe na cyfrowe) wytwarzającym sygnał logiczny 0 lub 1.
Wymagania dokładności, zarówno statycznej jak i dynamicznej, w przypadku rozróżniania
przez czujnik dwóch sytuacji zależą od konkretnego zadania, z reguły jednak są znacznie niższe
niż przy pomiarach wielkości ciągłych.
Znajomość zasady działania czujnika pomiarowego (przetwornika) pozwala niekiedy uniknąć
poważnych błędów, np. podczas obsługi lub wykonywania czynności w pobliżu czujnika.
Przykładowo, pracę czujnika fotoelektrycznego można zakłócić dodatkowym źródłem światła lub
zapyleniem. Opiłki metalowe lub pył grafitowy mogą zakłócić pomiar położenia stołu obrabiarki
indukcyjnym czujnikiem przesunięcia (induktosynem), natomiast są mniej niebezpieczne przy
pomiarze fotooptycznym. W niektórych przypadkach można zakłócić pracę czujnika, używając
w pobliżu niego radiotelefonu, defektoskopu ultradźwiękowego itd.
Czujniki pomiarowe
W układach pomiarowych stosowane są czujniki, których działanie oparte jest na
rozmaitych zjawiskach i prawach fizycznych i które są wykonywane w wielu odmianach
konstrukcyjnych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Przykładowo do pomiaru temperatury stosuje się termoelementy, których sygnałem
wyjściowym jest napięcie, termorezystory i termistory zmieniające swą rezystancję, czujniki
bimetaliczne, reagujące odkształceniem (przesunięciem), czujniki manometryczne reagujące
zmianą ciśnienia, czujniki cieczowe zmieniające wysokość słupa cieczy, czujniki pirometryczne
reagujące na promieniowanie cieplne zmianą sygnału elektrycznego, itd. Szczególnie duża ilość
zasad działania cechuje urządzenia pomiarowe, służące do analizy składu chemicznego.
Niektóre czujniki mają bardzo prostą konstrukcję, np. termoelement, inne są
rozbudowanymi urządzeniami o wysokiej precyzji, np. układy pomiaru pozycji jednostki
pływającej.
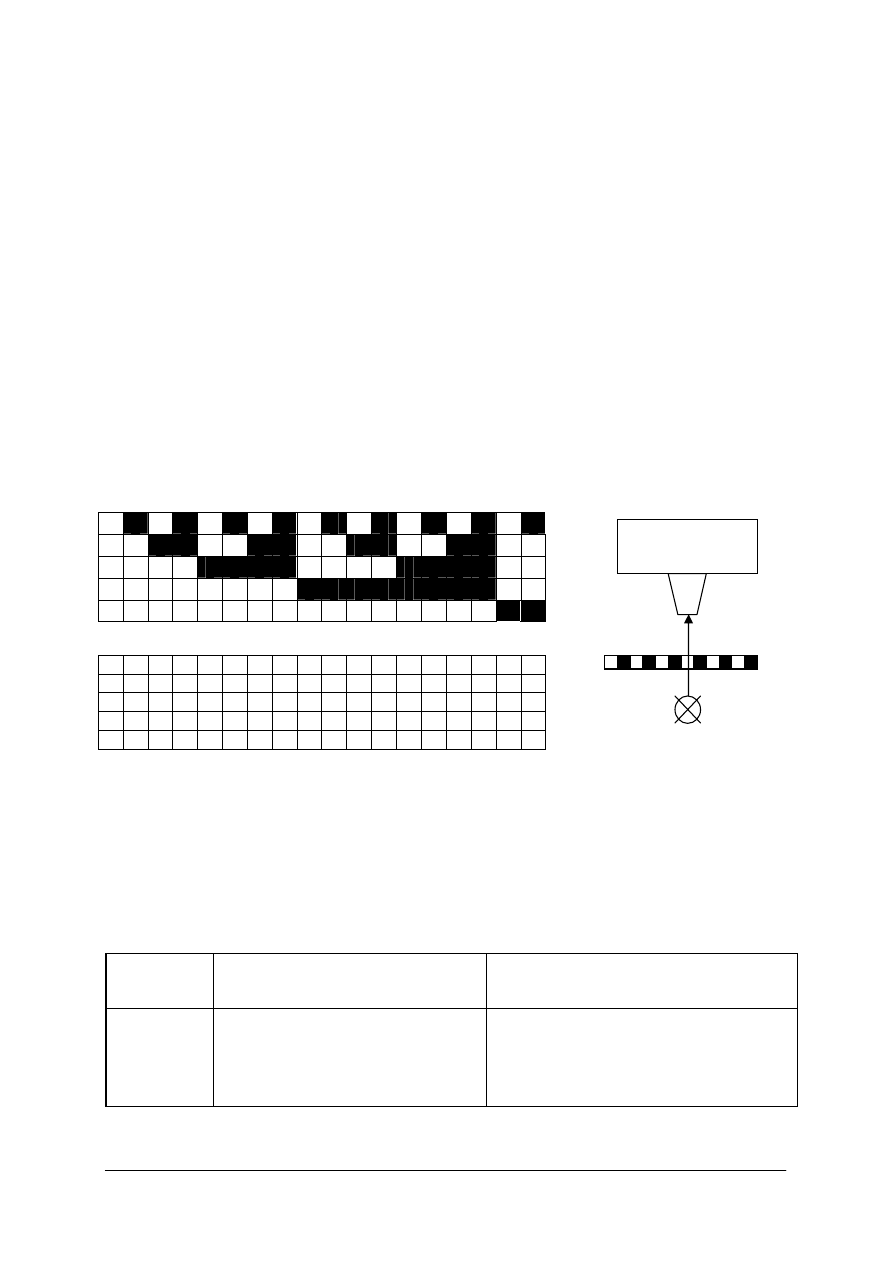
Konstrukcja czujników wiąże się z metodą pomiaru, w szczególności niektóre czujniki
przesunięcia lub przesunięcia kątowego mogą być stosowane tylko do pomiaru przyrostowego,
a nie absolutnego. Pomiar absolutny odbywa się względem stałego punktu odniesienia, natomiast
pomiar przyrostowy – względem dowolnie wybranego punktu odniesienia.
Przykładowo, za pomocą tarczy kodowej (rys. 9a) można określić każdorazowo położenie
elementu z dokładnością skoku punktu, natomiast za pomocą czujnika kreskowego (rys. 9b)
można określić jedynie wielkość i kierunek zmiany położenia kątowego tarczy w stosunku do
położenia początkowego. Przyrostowe układy pomiarowe tracą orientację w przypadku
przerwy w zasilaniu i wymazaniu stanu liczników zliczających impulsy.
0
1 0 1 0 1 0 1 0 1 0
1 0 1 0 1 0
1
0
0 1 1 0 0 1 1 0 0 1
1 0 0 1 1 0
0
0
0 0 0 1 1 1 1 0 0 0
0 1 1 1 1 0
0
0
0 0 0 0 0 0 0 1 1 1
1 1 1 1 1 0
0
0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1
1
Rys. 9. Tarcze liniowe do dyskretnego pomiaru położenia liniowego: a) kodowa – pomiar absolutny;
b) kreskowa – pomiar przyrostowy
W automatyce przemysłowej do podstawowego asortymentu zalicza się czujniki
temperatury, ciśnienia, przepływu, przyśpieszenia, napięcia, prądu, częstotliwości, poziomu,
przesunięcia liniowego oraz prędkości obrotowej (tab. 1). W elektroenergetycznej automatyce
zabezpieczeniowej podstawowymi elementami pomiarowymi są przekaźniki pomiarowe.
Tab. 1. Przykładowe czajniki pomiarowe wielkości ciągłych
Wielkość
mierzona
Nazwa czujnika
Wielkość wyjściowa
Temperatura
Termoelement
Termorezystor
Termistor
Czujnik bimetalowy
Czujnik manometryczny
Napięcie stałe
Rezystancja
Rezystancja
Przesunięcie
Ciśnienie
a)
Fotodetektor
b)
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Ciśnienie
Manometry z elementami sprężystymi
(rurka Bourdona, mieszek sprężysty,
membrana sprężysta)
Manometr cieczowy
Waga pierścieniowa
Czujnik tensometryczny
(półprzewodnikowy)
Przesunięcie
Różnica poziomów
Kąt obrotu
Rezystancja
Poziom
Pływak
Pływak wypornościowy (nurnikowy)
Czujnik pojemnościowy
Przesunięcie
Siła
Pojemność elektryczna,
Przepływ
Zwężka
Turbinka
Termoanemometr
Różnica ciśnień
Prędkość obrotowa
Rezystancja (napięcie)
Przesunięcie
liniowe
Potencjometr
Czujnik indukcyjny transformatorowy
Czujnik pojemnościowy
Czujnik fotoelektryczny
Czujnik pneumatyczny
Napięcie
Napięcie zmienne (amplituda lub przesunięcie
fazy)
Napięcie zmienne
Impulsy
Ciśnienie
Prędkość
kątowa
Prądnica tachometryczna
Tarcza impulsowa
Napięcie
Częstotliwość impulsów (napięcie)
Układy sterowania i kontrolne
Funkcje sterowania realizują układy sterowania automatycznego i zdalnego. Pierwsze
z wymienionych są przeznaczone do sterowania pracą urządzeń bez ingerencji człowieka,
zgodnie z ustalonym zadaniem. Z kolei układy sterowania zdalnego umożliwiają personelowi
oddziaływanie ze stanowiska operatorskiego na pracę określonego urządzenia w celu realizacji
zadania.
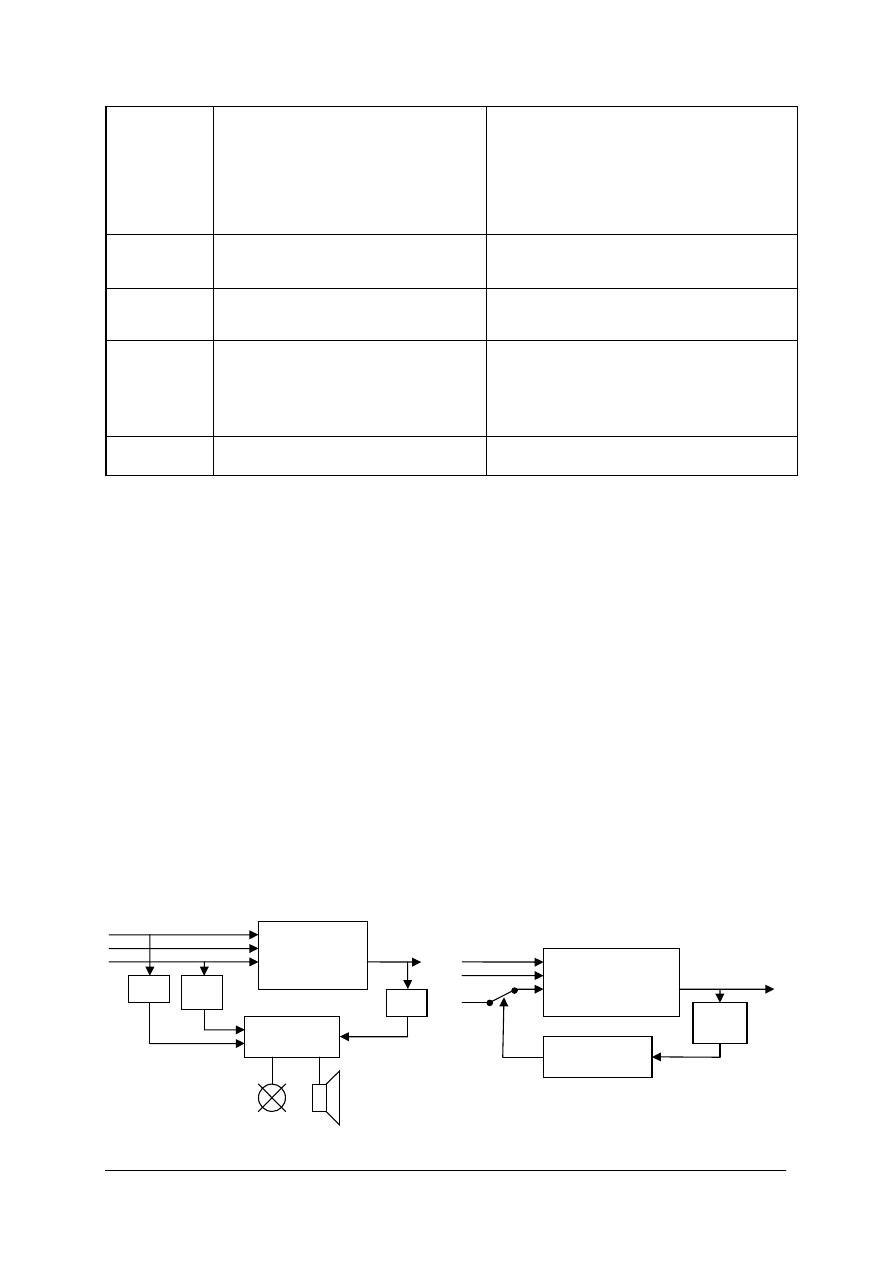
Układ alarmowy pełni zadanie sygnalizowania stanów, w których występują odchylenia od
ustalonych wartości granicznych parametrów obiektów sterowania, lub w których następują
zmiany w wybranych warunkach pracy urządzenia. Układ alarmowy jest aktywny, po
zadziałaniu układu bezpieczeństwa, lub gdy nastąpi zanik energii zasilającej poszczególne
układy automatyki, oraz po włączeniu się zasilania rezerwowego tych urządzeń.
Stany alarmowe poszczególnych urządzeń są wskazywane na stanowiskach sterowania,
a także prezentowane generowanie sygnałami świetlnymi i dźwiękowymi. Sygnał świetlny jest
podawany światłem przerywanym i podświetlany napis potwierdza awarię. Skasowanie sygnału
świetlnego jest możliwe dopiero po usunięciu przyczyn jego powstania. Potwierdzenie alarmu
powoduje zmianę charakteru tego sygnału ze światła migającego na ciągłe lub zmianę
częstotliwości migania, a sygnalizacja dźwiękowa ustaje.
Rys. 10. Schematy blokowe a) układu alarmowego; b) układu bezpieczeństwa
Obiekt
Układ
porównawczy
UP
UP
UP
sygnalizacja
sygnały
wejściowe
sygnały
wyjściowe
sygnały
wejściowe
Obiekt
Układ
porównawczy
UP
sygnały
wyjściowe
a)
b)

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Układ alarmowy działa niezależnie od układów sterowania i bezpieczeństwa (rys. 10).
W wypadku przerwania obwodu lub innego uszkodzenia układ posiada funkcję sabotażu,
wyzwalającą sygnał alarmowy informujący o tym uszkodzeniu. W celu ułatwienia wykrycia
krótkotrwałych stanów alarmowych samoczynnie zanikających, układ zachowuje informacje
tak, aby sygnalizacja przejściowych stanów alarmowych była utrzymana do chwili ich
potwierdzenia.
Zadaniem
układów
bezpieczeństwa jest generowanie sygnałów oddziaływających
na urządzenie sterowane – obiekt w taki sposób, aby zabezpieczyć to urządzenie przed awarią
lub rozszerzeniem się jej skutków. Układ bezpieczeństwa urządzeń działa automatycznie
po przekroczeniu granicznych wartości parametrów, które mogą spowodować awarię (rys.
10b). Ponadto system bezpieczeństwa, uwzględniając właściwości i cechy zabezpieczanych
urządzeń, obejmuje swoim działaniem wszystkie możliwe do przewidzenia stany awaryjne.
Ze względu na to, że omawiany układ musi działać niezależnie od układów sterowania
i alarmowego, jakiekolwiek uszkodzenia tych ostatnich nie wpływają na jego pracę. Układ
bezpieczeństwa działa w określonej sekwencji – realizuje w określonej kolejności funkcje
prowadzące
do
stanów
mniej
krytycznych,
zmniejszających
zagrożenie.
System
bezpieczeństwa w pierwszej fazie uruchamia zespół urządzeń rezerwowych, pozwalający
na przywrócenie normalnych warunków pracy, później redukuje obciążenie, przez co praca
urządzenia zostaje czasowo dostosowana do zaistniałych warunków. W końcowej fazie
działania układu bezpieczeństwa następuje awaryjne zatrzymanie jego pracy. Po zatrzymaniu
urządzenia przez układ bezpieczeństwa jego ponowne uruchomienie nie następuje
automatycznie, lecz wyłącznie po uprzednim ręcznym odblokowaniu. W niektórych stanach
krytycznych układ bezpieczeństwa powoduje natychmiastowe zatrzymanie pracy urządzenia
z pominięciem faz przejściowych.
Zamknięty układ regulacji automatycznej
W okrętowych układach sterowania stabilizacja lub regulacja nadążna parametrów jest
realizowana za pomocą zamkniętych układów regulacji. W układach tych wartości zadane
mogą być:
−
stałe niezmienne – regulacja stałowartościowa – regulacja ta będzie polegać na
zachowaniu wartości wyjściowej z obiektu na poziomie niezmienionym, względem stałej
wartości zadanej poprzez kompensację działania zakłóceń na obiekt sterowania (np.
utrzymanie stałego zanurzenia jednostki),
−
zmienne w funkcji czasu – regulacja nadążna – regulacja powoduje, że wartość wyjściowa
zmienia się nadążając za zmianą wartości zadanej (np. układy regulacji temperatury wody,
ciśnienia oleju).
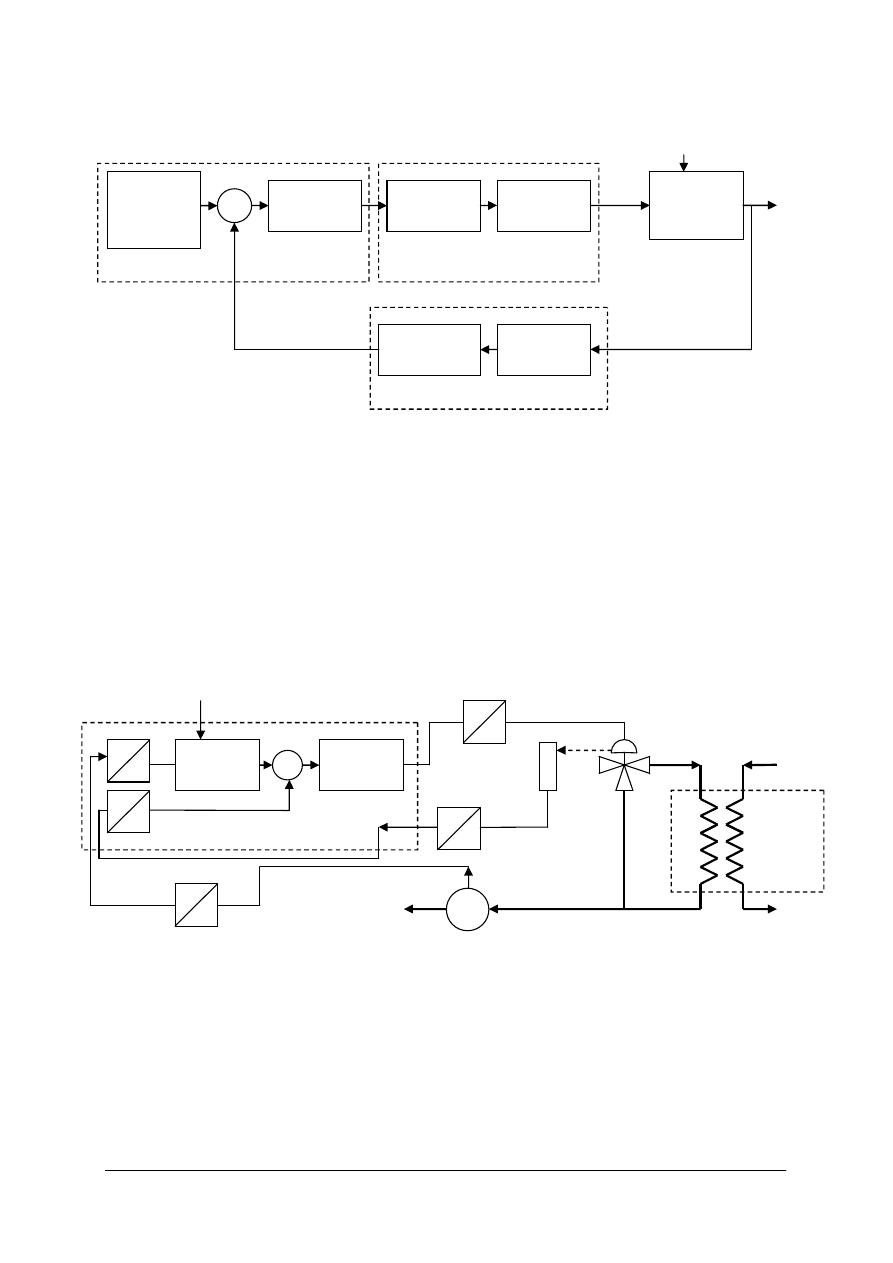
W układach tych oprócz obiektu sterowania można wyróżnić następujące podstawowe
bloki automatyki: pomiarowy, regulacji, wykonawczy (rys. 11).
Informacji o stanie regulowanej wielkości rzeczywistej – wyjściowej dostarczają układy
pomiarowe, tworzące blok pomiarowy układu regulacji. Źródłem sygnału jest
czujnik lub
urządzenie pomiarowe mierzące bezpośrednio wielkość fizyczną wyjściową z obiektu. Zwykle
sygnał ten jest przetwarzany z wielkości nieelektrycznej na elektryczną, filtrowany
i wzmacniany.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Rys. 11. Schemat blokowy układu regulacji automatycznej
W takiej postaci wielkość mierzona jest porównywana z wielkością zadaną w bloku
regulacji i w wypadku wystąpienia uchybu pomiędzy tymi wartościami regulator wypracowuje
według określonej reguły sterowania (np. trójpołożeniowej czy PID) sygnał przesyłany
następnie do siłownika w bloku wykonawczym. Następnie element nastawczy zmienia wartość
sterującą obiektu sterowania, co powoduję zmianę wartości rzeczywistej. Dąży się do tego.
aby proces regulacji trwał tak długo, aż uchyb regulacji osiągnie wartość równą zeru lub bliską
tej wartości (uchyb mieści się w zakresie dopuszczalnego uchybu ustalonego). Ze stanu
równowagi może wyprowadzić układ zmiana wartości zadanej lub zakłócenia działające na
obiekt regulacji (np. zmiana temperatury, obciążenia, itp.).
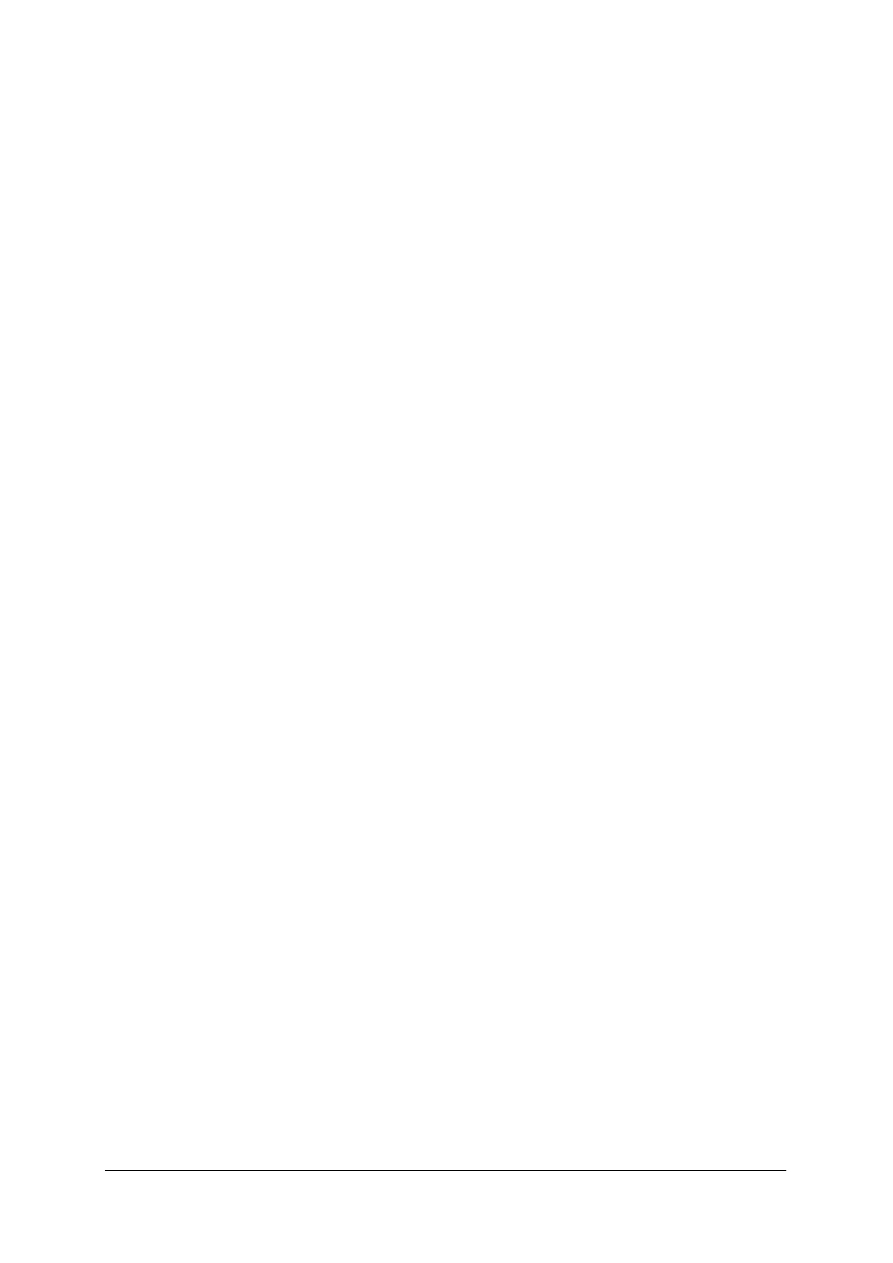
Rys. 12. Zamknięty układ regulacji na przykładzie układu regulacji temperatury wody chłodzącej silnik
Przykładem rozwiązania układu regulacji, który często występuje na statkach, jest układ
stabilizujący temperaturę obiegu chłodzącego wody i oleju silnika głównego oraz napędowego
zespołu prądotwórczego. W układzie regulacji temperatury, oprócz podstawowej pętli,
występuje dodatkowo sprzężenie badające położenie zaworu trójdrożnego regulującego
natężenie przepływu wody słodkiej, chłodzonej wodą morską. Podwójna pętla regulacji
temperatury i pozycji zaworu zapewnia poprawę jakości stabilizacji temperatury poprzez
Nastawnik
wartości
zadanej
Regulator
Siłownik
Element
nastawczy
Obiekt
sterowania
Blok regulacji
Blok wykonawczy
Przetwornik
pomiarowy
Czujnik
Blok pomiarowy
zakłócenia
wymiennik
ciepła
TC
Do silnika
woda
morska
Regulator
PID
Regulator
pozycji
A
C
A
C
I
R
I
R
I
P
Sygnały
wejściowe
temp. zadana
silnika 80
O
C
zawór
trójdrożny
woda
słodka
czujnik
temperatury
sterownik
OUT
IN
IN

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
dokładne pozycjonowanie zaworu regulującego. Obiektem sterowania jest wymiennik ciepła –
chłodnica. Sygnałem wyjściowym jest temperatura cieczy chłodzonej, mierzona przez czujnik
rezystancyjny PTIOO – TC. Następnie wartość rezystancji czujnika przetwarzany jest na
wartość prądu w zakresie 4–20mA. W sterowniku analogów sygnał wejściowy IN prądu
przetwarzany jest za pomocą karty przetwornika A/C (analogowo–cyfrowego) na sygnał cyfrowy.
Zwykle stosowane są przetworniki ośmio– lub dwunastobitowe, w zależności od wymaganej
dokładności pomiaru. Pozycja zaworu określana jest przez rezystancję potencjometru, która
następnie zostaje przetworzona na proporcjonalny do rezystancji sygnał prądu. W sterowniku
za pomocą karty przetwornika A/C sygnał zamieniany jest na sygnał cyfrowy. Regulacja
odchylenia mierzonej temperatury od temperatury zadanej przebiega zgodnie z regułą PID.
Sygnał sterujący OUT przetwarzany jest przez kartę C/A (cyfrowo–analogową) na postać
analogową, najczęściej na sygnał prądowy 4–20 mA, i następnie przesyłany jako sygnał
sterujący do zaworu regulacyjnego.
Zawór z reguły posiada własny przetwornik I/P (prądu na ciśnienie), który wykorzystuje
sygnał położenia zaworu w lokalnej pętli sterowania nadążnego. Sygnał położenia zaworu ma
istotne znaczenie w lokalnej pętli sterowania nadążnego, gdy charakterystyka zaworu
sterującego przyjmuje postać nieliniową.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co oznaczają pojęcia sterowanie i regulacja?
2. Co to jest zamknięty układ regulacji?
3. Czym różnią się ciągłe układy regulacji od układów dwu– i trzypołożeniowych?
4. Jakie funkcje pełnią elementy wykonawcze w układu automatycznej regulacji (UAR)?
5. Jakie typy czujników stosuje się w UAR?
6. W jakim celu buduje się układy kaskadowe?
7. Dlaczego układy alarmowe buduje niezależnie od układów regulacji?
4.1.3. Ćwiczenia
Ćwiczenie 1
Zidentyfikuj w przekazanej dokumentacji układ regulacji. Określ elementy, które spełniają
funkcje: regulatora, czujnika pomiarowego, przetwornika i elementu wykonawczego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z przekazaną dokumentacją,
2) zidentyfikować pętlę sprzężenia zwrotnego,
3) przeprowadzić analizę działania układu,
4) określić wielkości: sygnał wyjściowy, sygnał zadany, sygnał sterujący,
5) wskazać poszczególne elementy układu.
Wyposażenie stanowiska pracy:
−
przybory do pisania,
−
dokumentacja urządzeń, w których znajdują się układy automatycznej regulacji.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Ćwiczenie 2
Określ zakres przetwarzania i czułość wskazanego przez nauczyciela czujnika. Znajdź
w katalogach zamiennik. Uzasadnij swój wybór.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) określić typ czujnika,
2) odnaleźć odpowiednią kartę katalogową czujnika,
3) określić podstawowe parametry charakterystyczne i maksymalne czujnika,
4) odnaleźć w katalogach lub w sieci Internet czujnik, który może zastąpić czujnik badany.
Wyposażenie stanowiska pracy:
−
czujniki pomiarowe – kilka rodzajów,
−
katalogi czujników lub ich karty katalogowe,
−
komputer z dostępem do Internetu,
−
przybory do pisania.
Ćwiczenie 3
Wyjaśnij zasadę działania układu regulacji temperatury w układzie klimatyzacji dowolnego
pomieszczenia. Opisz sposób działania każdego elementu biorącego udział w regulacji.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zidentyfikować podstawowe elementy UAR,
2) określić zasadę działania każdego elementu,
3) odnaleźć w katalogach charakterystyki podstawowych elementów UAR,
4) opisać zasadę działania całego układu.
Wyposażenie stanowiska pracy:
−
dokumentacja układu klimatyzacji wraz z regulatorem temperatury,
−
papier, przyrządy do pisania,
−
katalogi elementów układów automatycznej regulacji.
4.1.2. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zidentyfikować UAR?
2) zidentyfikować poszczególne elementy UAR?
3) scharakteryzować właściwości regulatorów ciągłych, dwu–
trzystanowej i kaskadowej?
4) opisać funkcje realizowane przez podstawowe człony regulatorów P, I
i D ?
5) dobrać zamienniki elementów UAR?
6) określić zasadę pracy podstawowych elementów UAR?
7) dobrać nastawy regulatora PID
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
4.2. Automatyka okrętowa
4.2.1. Materiał nauczania
Przepisy
towarzystw
klasyfikacyjnych
dotyczące
zautomatyzowanego
systemu
elektroenergetycznego statku odnoszą się do warunków niezawodnej pracy systemu i obejmują
dwie grupy wymagań związanych z fazą projektową systemu i z fazą produkcyjną W zakresie
przepisów związanych z fazą projektową znajdują się cechy funkcjonalne i strukturalne układu, a
przepisy dotyczące fazy produkcyjnej zawierają wymagania wykonawcze odnośnie do układów
automatyki i elementów oraz urządzeń, które wchodzą w skład systemów automatyki. Przepisy
towarzystw klasyfikacyjnych nie dotyczą aspektów ekonomicznych projektowania produkcji i w
późniejszym czasie eksploatacji systemów elektroenergetycznych.
Niekontrolowane i nieprzemyślane wprowadzanie na statek układów sterowania może
spowodować powstanie zagrożeń dla ludzi i przewożonych towarów. Dlatego coraz częściej
układy regulacji łączy się ze sobą tworząc zintegrowane systemy zarządzania statkiem. W celu
ułatwienia obsługi tych nieraz bardzo skomplikowanych układów na pokładach jednostek
pływających wyodrębniono Centrum Manewrowo – Kontrolne (CMK).
Stanowisko to jest na ogół wyodrębniane z przedziału maszynowego, pokryte jest ono
izolacją termiczną i akustyczną, co w ogromnym stopniu zmniejsza uciążliwość obsługi tych
urządzeń oraz zmniejsza awaryjność zainstalowanych tam urządzeń. Na obecnie budowanych
statkach CMK stanowi standardowe stanowisko sterowania na mostku. Obsługę układów
sterowania ze stanowisk lokalnych prowadzi się tylko w wyjątkowych sytuacjach.
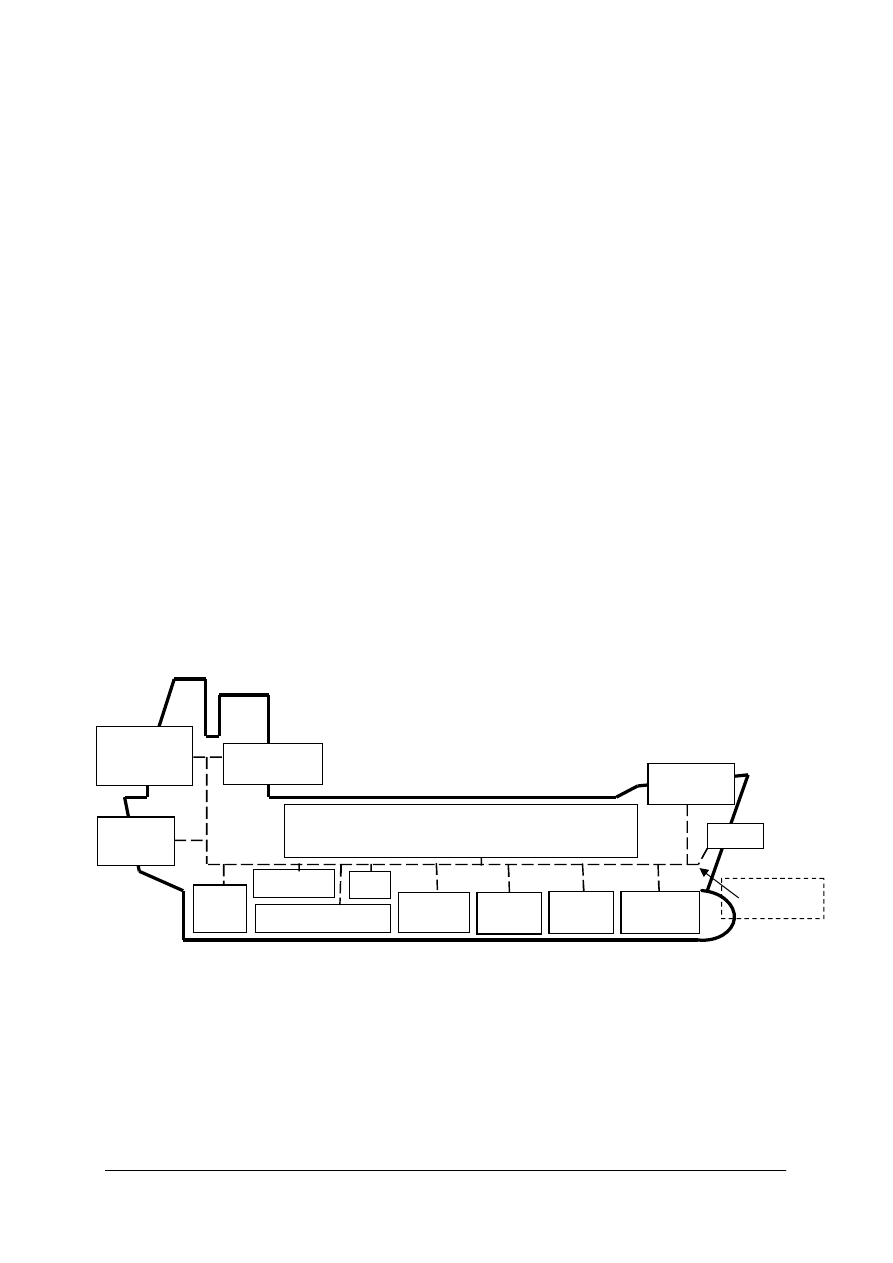
Automatyzacja statku jest to proces integracji urządzeń dających możliwość sterowania
wszystkimi układami i urządzeniami okrętowymi w sposób automatyczny, bez udziału człowieka.
Rys. 13. Funkcjonalne rozmieszczenie urządzeń na statku
Statek jako obiekt zautomatyzowany musi być wyposażony w urządzenia automatyki
obsługujące maszyny i mechanizmy, rozmieszczone na całym statku. Urządzenia automatyki
pozwalają na sterowanie centralne, w którym sygnały przesyłane są za pomocą sygnałów
elektrycznych z CMK do poszczególnych obiektów i z powrotem.
Sieci te są na ogół zdublowane tak, by w czasie awarii systemu podstawowego, zapasowy
system mógł przejąć wszystkie funkcje.
Napęd
główny
Rozdzielnica elektryczna
Urz. pomocnicze
Ster
strumieniowy
Zbiorniki
balastowe
Zbiorniki
zęzy
kocioł
Zbiornik
paliwa
kotwica
Kabestan
cumowniczy
ładownie
Maszyna
sterowa
Kierowanie
statkiem
Nawigacja
Administracja
i zarządzanie
Magistrala
komunikacyjna

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Typowym przykładem automatyzacji statku jest automatyzacja siłowni. Zautomatyzowaną
siłownię można eksploatować okresowo bez stałej obsługi. W tym czasie sterowanie i kontrola
pracy siłowni w ograniczonym zakresie odbywa się ze stanowiska umieszczonego w sterówce,
na mostku nawigacyjnym. Jednak po określonym czasie konieczna jest interwencja obsługi na
lokalnych stanowiskach kontrolno – sterowniczych. Zakres i czas tej interwencji, określony
został przez towarzystwa kwalifikacyjne, jakie stawia się w wymaganiach „siłowni okresowo
bezwachtowej”. W tym wypadku zakres automatyzacji urządzeń powinien umożliwić
nienadzorowaną bezpośrednio pracę tych urządzeń w czasie ośmiu godzin. Ośmiogodzinny
stan bezwachtowy pracy siłowni wymaga pełnej automatyzacji wszystkich procesów,
wytwarzania energii elektrycznej, sterowania pracą silnika napędowego statku, oświetlenia i
klimatyzacji pomieszczeń, stabilizacji jednostki itp. Wydanie przez układy automatyki
pojedynczego polecenia (np. start zespołu napędowego) oznacza z reguły sekwencyjne
wykonanie całego szeregu instrukcji (np. wstępne przesmarowanie przed startem silnika,
otwarcie zaworu powietrza startowego, podanie dawki startowej paliwa, wyłączenie dopływu
powietrza startowego itd) tak, aby dane polecenie zostało zrealizowane zgodnie
z wymaganiami technicznymi. Po wykonaniu sekwencji zadań układ automatyki nie przestaje
pracować, kontroluje stan realizacji poleceń i przekazuje obsłudze odpowiednie komunikaty.
W zautomatyzowanych systemach okrętowych urządzenia automatyki działają według
ustalonych procedur, sterując poszczególnymi układami w zależności od zmian warunków
zewnętrznych i nieprzewidywalnych zakłóceń, nadzorując i sygnalizując przebieg realizacji tych
procesów. Dodatkowo układy te realizują funkcje alarmowania i zabezpieczenia, niezbędne do
kontroli stanów krytycznych pracujących urządzeń statku.
Bardzo często obwody i układy automatyki służące do wyświetlania komunikatów
i obsługi stanów awaryjnych buduje się zupełnie niezależnie od podstawowych układów
sterowania. W ten sposób częściowo niweluje się możliwość zaistnienia sytuacji krytycznej
w przypadku awarii podstawowego systemu sterowania.
Na statku można wyodrębnić następujące układy funkcjonalne:
−
układ elektroenergetyczny obejmuje wszystkie zadania dotyczące wytwarzania,
przetwarzania, rozdzielania i przesyłania energii elektrycznej, a więc min.: uruchamianie
i zatrzymywanie zespołów prądotwórczych, regulację napięcia i częstotliwości oraz
regulację rozkładu obciążenia na zespoły pracujące równolegle,
−
układ napędu głównego statku, jest odpowiedzialny za uruchamianie i zatrzymywanie
silnika, regulację prędkości obrotowej, regulację kierunku siły naporu pędnika, regulację
skoku śruby nastawnej (jeśli występuje) oraz – w wypadku napędu o większej liczbie
silników – regulację rozkładu obciążenia silników pracujących równolegle,
−
układ instalacji pomocniczych zapewnia ciągłość dostarczania mediów: wody, paliwa,
oleju itp. o właściwych parametrach, niezbędnych do prawidłowej pracy innych
podsystemów,
−
układ regulacji temperatury i wentylacji zapewnia regulację temperatury, np. ładunku,
wilgotności czy przepływu powietrza w ładowniach i pomieszczeniach socjalnych oraz
roboczych statku.
−
układ parowy obejmuje wszystkie funkcje związane z wytwarzaniem pary i pracą kotłów
parowych oraz dalszym wykorzystaniem pary.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
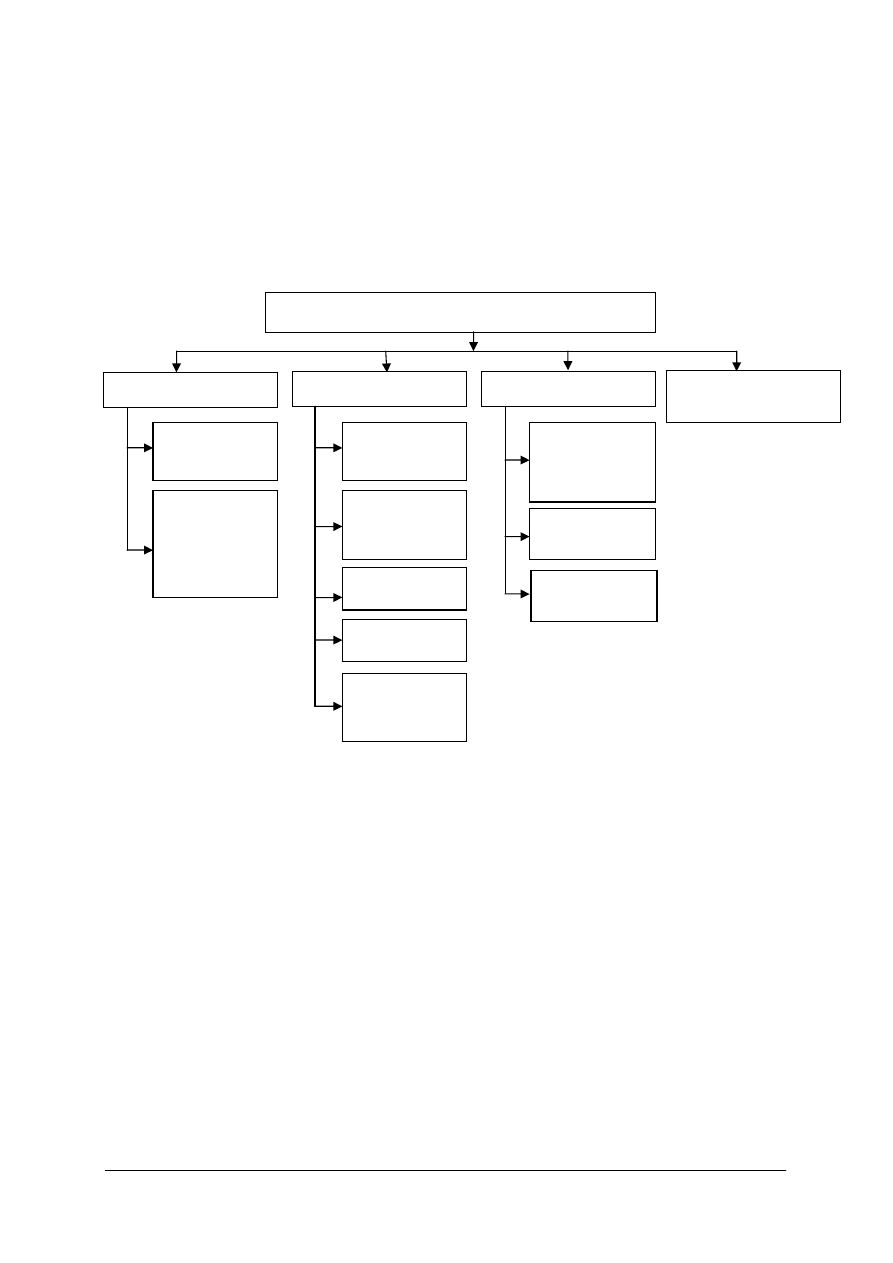
Systemy automatyki okrętowej
W trakcie analizy budowy i funkcjonowania okrętowego systemu sterowania (rys. 14)
wyróżnić można 4 podstawowe systemy:
−
energetycznego,
−
nawigacyjnego,
−
ładunkowego,
−
administracji i zarządzania.
Rys. 14. Schemat blokowy Okrętowego Sytemu Sterowania
W ramach tych wydzielonych systemów można wyróżnić kilka podsystemów, i tak
w systemie energetycznym wyróżnia się następujące podsystemy:
−
elektroenergetyczny,
−
napędowy,
−
parowy,
−
urządzeń oraz instalacji pomocniczych siłowni,
−
podsystem chłodni i klimatyzacji.
W podsystemie ładunkowym natomiast wyróżniamy podsystem:
−
regulacji temperatury i wentylacji,
−
przeładunkowy,
−
balastowania (balastowanie automatyczne w trakcie załadunku i wyładunku).
Z kolei system nawigacyjny dzieli się na:
−
podsystem prowadzenia statku,
−
stabilizacji kołysań.
Okrętowy System Sterowania
System ładunkowy
Administracja
i zarządzanie
System energetyczny
Podsystem
stabilizacji kołysań
statku
Podsystem
prowadzenia
statku (sterowanie
po kursie, po
kursie trajektorii
cumowania
Podsystem
napędowy
Podsystem
pomocniczy
(chłodzenie
urządzeń)
Podsystem
elektroenergetyczny
System nawigacji
Podsystem zasilania
w parę
Podsystem
regulacji
temperatury
i wentylacji
Podsystem
przeładunkowy
Podsystem
balastowania
Podsystem
sterowania
chłodniami
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Komputerowy system sterowania statku
Wśród spotykanych rozwiązań sterowania na statku są dwa typy konfiguracji:
−
system scentralizowany – jednokomputerowy,
−
system rozproszony – wielokomputerowy.
W systemie scentralizowanym przetwarzanie wszystkich danych dotyczących stanu
jednostki, sterowanie oraz zadawanie wartości oczekiwanych jest realizowane przez
pojedynczy komputer o dużej mocy obliczeniowej, który wypełnia następujące funkcje:
−
odczytuje sygnały wszystkich przetworników pomiarowych, odczytuje stan wszystkich
klawiatur, wprowadza wartości tych sygnałów kolejno do pamięci wewnętrznej,
−
realizuje programy sterujące i kontrolne według określonych algorytmów,
−
wysyła sygnały sterujące procesami, przesyła ich wartości kolejno w czasie do
odpowiednich elementów wykonawczych oraz zbiera informacje o stanie realizacji tych
zadań,
−
dodatkowo przetwarza informacje zwrotne, wyświetlając je na ekranie monitora.
Sygnały z przetworników pomiarowych i sygnały zadawane z komputera za pomocą kart
wej/wyj przesyłane są w postaci sygnałów analogowych oraz cyfrowych. Znaczna odległość
między kontrolerem głównym znajdującym się zazwyczaj w CMK a urządzeniami siłowni
i punktami pomiarowymi prowadzi do wysokich kosztów okablowania, montażu oraz
zabezpieczenia tych przewodów przed wpływem zakłóceń elektromagnetycznych. Dodatkowo
awaria tego komputera powoduje całkowity paraliż wszystkich systemów na jednostce.
Opanowanie sytuacji w czasie takiej awarii przez nieliczną załogę jest bardzo trudne i może
przyczynić się do zaistnienia wypadku. W związku z tym systemy scentralizowane nie mają
zastosowania na statkach współcześnie budowanych.
Rys. 15. Sterowanie rozproszone, w którym istnieje wiele komputerów sterujących
obsługujących poszczególne układy
POZIOM ZARZĄDZANIA
(komputer z funkcjami
wizualizacyjnymi)
POZIOM STEROWANIA
(komputer A realizujący
sterowania w wybranym
podsystemie)
POZIOM STEROWANIA
(komputer B realizujący
sterowania w wybranym
podsystemie)
POZIOM STEROWANIA
(komputer N realizujący
sterowania w wybranym
podsystemie)
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
ze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
ze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź p
rze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
ze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
ze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
ze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
zes
y
łaj
ą
sygna
ły
s
te
ruj
ące
Uk
ła
dy
w
ej
ść
/w
yj
ść
od
cz
y
tuj
ą
b
ąd
ź
pr
ze
sy
łaj
ą
sygna
ły
s
te
ruj
ące
……
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
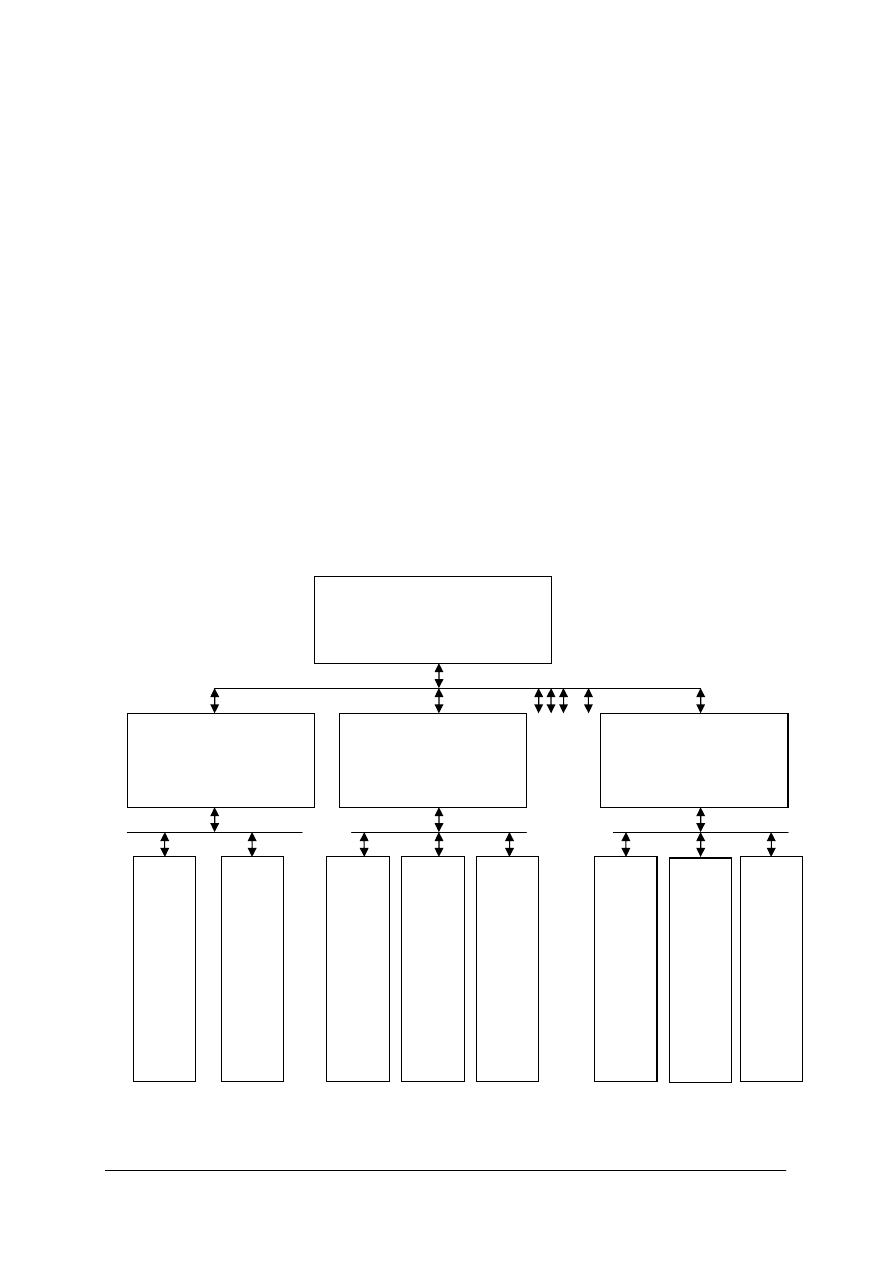
Budowę okrętowego systemu sterowania z rozproszonymi jednostkami sterującymi (wiele
komputerów) opiera się na wielopoziomowej strukturze sterowania (rys. 15), w której
wyróżnia się, powiązane siecią komunikacyjną, poziomy zarządzania, sterowania i obiektów.
W systemie rozproszonym (zdecentralizowanym) przetwarzanie wartości stanu procesu,
funkcje kontroli i sterowania są rozdzielone między kilka przestrzennie rozproszonych
komputerów – zwykle sterowników programowalnych typu PLC (paneli lokalnych).
Sterowniki te wyposażone są w karty wejść i wyjść analogowych oraz cyfrowych,
umożliwiające pomiar wielkości i sterowanie poszczególnymi urządzeniami siłowni
za pośrednictwem członów pomiarowych i elementów wykonawczych. Sterowniki,
wykorzystując zdwojoną sieć (w celu zapewnienia bezpieczeństwa przesyłania informacji
w czasie awarii), komunikują się z nadrzędnym komputerem z poziomu zarządzania,
odpowiedzialnym za koncentracje sygnałów i wysyłanie sygnałów zadających do sterowników.
Ponadto komputer nadrzędny obsługuje pulpit operatorski, na którym prezentowane
są w formie graficznej poziomy wartości regulowanych.
Ze względu na wymagania techniczne, bezpieczeństwo, dyspozycyjność systemu,
niezawodność współpracujących urządzeń oraz ekonomię rozwiązań, system o konfiguracji
rozproszonej ma obecnie szerokie zastosowanie w systemach automatyki okrętowej.
Sterowanie systemami okrętowymi i urządzeniami odbywa się z wykorzystaniem
rozproszonych i przypisanych do tych urządzeń mikroprocesorowych układów programowalnych
– tzw. sterowników swobodnie programowalnych. Dotyczy to różnego rodzaju urządzeń i
instalacji mechanicznych oraz elektrycznych (np. pomp, zaworów, przekaźników).
Przykładową
konfigurację
zintegrowanego
systemu
sterowania
z rozproszonymi
mikroprocesorowymi układami – sterownikami programowalnymi przedstawia (rys. 15).
Struktura ta ma charakter hierarchiczny.
Rozproszone sterowniki programowalne (PLC) zajmują najniższe miejsce w hierarchii
decyzyjnej tej struktury. Sterowniki te waz z elementami wykonawczymi i z czujnikami
pomiarowymi znajdują się w pobliżu obiektu sterowania. Poprzez karty A/C (analogowo–
cyfrowe) i B/C (binarno–cyfrowe), zwane często modułami wejściowymi, sterowniki zbierają
informacje z czujników umieszczonych w punktach pomiarowych obiektów. Natomiast
poprzez moduły wyjściowe (karty C/A cyfrowo–analogowe i C/B cyfrowo–binarne), sygnały
sterujące są przesyłane do urządzeń wykonawczych (np. zaworów, siłowników itp.). Sygnały
sterujące są generowane przez procesor sterownika zgodnie z algorytmem sterowania
umieszczonym w pamięci sterownika. Czynności sterujące wchodzące w skład sekwencyjnych
instrukcji sterownika realizowane są w obrębie układu czujnik – sterownik – urządzenie
wykonawcze. Sygnały – rozkazy o większej wadze decyzyjnej (wartości zadane, parametry),
pochodzą z wyższych poziomów sterowania. Istnieje również ograniczona możliwość
wpływania na przebieg procesu poprzez bezpośrednie zadanie wartości sterujących w
sterowniku. Rozwiązanie takie stosuje się w sytuacji awaryjnej, np. podczas przerwy
w komunikacji z centralnym komputerem nadrzędnym lub w celach konserwacyjno–
naprawczych.
Zadaniem stacji procesorowych jest obróbka informacji docierającej z podlegającej im
grupy sterowników, oraz obróbka informacji, które są odbierane przez te sterowniki. Jednak
trzeba zaznaczyć, że część urządzeń okrętowych, np. regulowane napędy elektryczne
wymagają specjalizowanych sterowników. W tym wypadku sterownik PLC stanowi element
koncentrujący sygnały i zadający sygnały wejściowe do sterownika specjalizowanego. Stacje
procesorowe sprawują nadzór nad działaniem PLC oraz sterownikami specjalizowanymi
i koordynują ich współpracę. Z uwagi na zwiększenie niezawodności stosuje się rozwiązania
z pełną redundancją (zdublowanie stacji procesorowych).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Najwyższy poziom sterowania – poziom zarządzania i nadzoru zajmują centralne
komputery. Zwykle są to dwa komputery pracujące w systemie z pulpitami operatorskimi
umieszczonymi w CMK oraz na mostku w sterówce. Umiejscowienie pulpitów oraz komputerów
zależy od konstrukcji i typu jednostki. W CMK operator ma dostęp do informacji związanych z
pracą siłowni i z systemem energetycznym statku.
Natomiast w pozostałych punktach decyzyjnych przewiduje się jedynie możliwość wpływania
na parametry bezpośrednio związane z danym stanowiskiem sterowania.
Wszystkie komputery połączone są ze stacjami procesorowymi za pomocą sieci LAN.
Na większości obecnie budowanych statków w rozwiązaniach automatyki stosuje się także
połączenie sieci LAN z siecią lądową za pomocą łącz satelitarnych, dzięki którym parametry
techniczne systemu sterowania, na bieżąco lub w postaci plików przekazywane są do armatora.
W przypadku awarii konsultant znajdujący się na lądzie może wspomóc obsługę statku
w lokalizacji i naprawie uszkodzenia.
Podstawowe funkcje w automatyzacji statków pełnią sterowniki PLC. Do sterowników
docierają informacje o aktualnych parametrach w obsługiwanym obiekcie. Realizacja zadań na
poziomie sterowników odbywa się poprzez realizację zbioru procedur i podprogramów na
podstawie danych otrzymanych z czujników pomiarowych obiektów. Ten poziom sterowań
nie obejmuje wykonywania poleceń od operatora, lecz uwzględnia tylko stan, w którym
znajduje się obiekt.
Drugi poziom regulacji to wykonywanie wszystkich podprogramów realizujących
polecenia od operatora, z uwzględnieniem stanu obiektu za pośrednictwem lokalnych stacji
PLC.
Trzeci poziom obejmuje alarmowanie oraz sygnalizowanie nieprawidłowości i awarii
w całym systemie, zbieranie danych o stanie urządzeń, a także w zależności od stopnia dostępu
do systemu, zdalne sterowanie i zmianę parametrów oraz wartości zadanych.
Wszystkie poziomy oprogramowania powiązane są ze sobą według określonych
priorytetów tak, aby nie dopuścić do nieokreślonych, konfliktowych sytuacji mogących
doprowadzić do awarii urządzeń sterowanych.
W wypadku zmiany parametrów w układach gdy stanowiska dostępu do systemu są
zdwojone, dokonywanie tych zmian jest możliwe tylko z jednego stanowiska w systemie, pod
warunkiem, że operator posiada uprawnienia dostępu do systemu.
Na poziomie zarządzania i nadzoru realizowane są następujące funkcje:
−
monitorowanie parametrów urządzeń i alarmowanie o przekroczeniu przez nie
dopuszczalnych wartości oraz o nieprawidłowych stanach,
−
prezentowanie na ekranie monitorów schematów mnemotechnicznych (tzw. mimik)
z aktualnym stanem poszczególnych systemów i urządzeń analizowanych systemów,
−
graficzne zobrazowanie wartości mierzonych parametrów – objętości i ciężaru cieczy
w zbiornikach,
−
okresowe rejestrowanie parametrów i wydruk stanów alarmowych występujących
w siłowni,
−
sygnalizacja grup alarmowych (grupa alarmowa jest to zespół urządzeń powiązanych
funkcjonalnie i sygnalizacją alarmową) siłowni na mostku, w pomieszczeniach
ogólnostatkowych i w kabinach mechaników wachtowych,
−
automatyczne blokowanie fałszywych alarmów (np. po celowym zatrzymaniu urządzenia
lub wywołanych kołysaniem się statku),
−
automatyczne oraz zdalne sterowanie urządzeniami i zmiana parametrów,
−
nadzór nad bezpieczeństwem pracy mechanika wachtowego podczas jego czasowego
pobytu w siłowni przy pracy bezwachtowej,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
−
autokontrola prawidłowości działania układu komputerowego,
−
przywołanie mechaników do centrali manewrowo-kontrolnej (CMK).
Głównym celem stosowania konfiguracji z urządzeniami zdwojonymi jest zwiększenie
niezawodności systemu sterującego i kontroli, gdzie w razie awarii urządzenia podstawowego
jego funkcje przejmuje urządzenie zapasowe. Zagadnienia bezpieczeństwa statku sprowadzają
się w większości sytuacji do wykrywania awarii i alarmowania oraz zabezpieczania poprzez,
np. zatrzymywanie pracy urządzenia w bezpiecznym stanie. Funkcje te na statku realizują
układy alarmowe i bezpieczeństwa.
Zabezpieczeniem przed awarią komputera aktualnie sterującego jest zastępujący jego pracę
komputer rezerwowy. Przy takiej konfiguracji komputerowy system sterujący składa się
z dwóch komputerów: sterującego (podstawowego) i rezerwowego oraz układu
przełączającego ich pracę. Komputery pracują równolegle i przetwarzają te same wartości
zmiennych procesu oraz realizują identyczne programy sterujące. Różnica między nimi polega
na tym, że tylko jeden z komputerów wysyła sygnały sterujące do elementów wykonawczych.
W sytuacji awaryjnej pracy komputera urządzenie przełączające przekazuje sterowanie
procesem do komputera rezerwowego. Praca równoległa komputerów: sterującego
i rezerwowego nie wpływa na szybkość pracy systemu, ale zabezpiecza przed utratą ciągłości
sterowania, co jest bardzo ważne dla bezpieczeństwa statku. Zwykle jako układ przełączający
stosuje się niezależny sterownik kontrolujący o wyższej niezawodności niż komputery
systemu. Sterownik na bieżąco sprawdza działanie komputera podstawowego. W wypadku
awarii sterownika podstawowego funkcję sterującą przejmuje komputer będący w rezerwie.
Systemy sterujące z komputerem rezerwowym zapewniają wysoki poziom niezawodności
całego systemu, czemu towarzyszy jednak znaczny wzrost kosztów. Jednocześnie trzeba
zaznaczyć, że głównymi źródłami awarii na statku nie są systemy komputerowe, lecz czujniki,
elementy wykonawcze, połączenia i okablowanie, układy zasilania oraz sieć komunikacyjna.
Czujniki i elementy wykonawcze nie są zdwajane, ale mogą występować podwójne czujniki,
wykorzystywane przez oddzielone układy: alarmowy i bezpieczeństwa.
Zgodnie z przepisami towarzystw klasyfikacyjnych zdwajane są na statku układy zasilania i
sieć komunikacyjna – łącząca system. Systemy komputerowe są zasilane z dwóch niezależnych
źródeł energii elektrycznej oraz zabezpieczone przed skutkami zwarć i przeciążeń.
Przełączanie zasilania następuje automatycznie i bezprzerwowo. Sieć komunikacyjna posiada
mechanizmy diagnostyczne wskazujące awarie połączeń. Awarie te inicjują alarm. Awaria
elementu sieci nie wpływa na działanie systemu. Połączone sieci zdwojone są od siebie
niezależne, separowane; awaria w jednej z nich nie wpływa na działanie drugiej. Przełączanie
przepływu informacji między sieciami zdwojonymi następuje samoczynnie, a zarazem nie może
zakłócać sygnałów źródłowych i ciągłości obsługi.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie podstawowe systemy automatyki wyróżniamy na jednostkach pływających?
2. Czym różnią się podstawowe konfiguracja systemu scentralizowanego od rozproszonego?
3. Jaką funkcje pełnia sterowniki PLC w okrętowych systemach sterowania i regulacji?
4. Jakie zadania w układach sterowania pełnią komputery ?
5. Jaka jest zasada działania sterowników PLC?
6. W jaki sposób przesyła się i przetwarza sygnały sterujące?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
4.2.3. Ćwiczenia
Ćwiczenie 1
W układzie regulacji odnajdź przetworniki A/C i C/A, określ funkcje jakie pełnią.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z budową i zasadą działania przetworników A/C i C/A,
2) odnaleźć w normach symbole jakimi oznacza się przetworniki A/C i C/A,
3) wyszukać w dokumentacji przekazanej przez nauczyciela przetworniki A/C i C/A,
Wyposażenie stanowiska pracy:
−
dokumentacja układów elektrycznych zawierająca przetworniki A/C i C/A,
−
tablice z symbolami zgodnymi z PN i ISO,
−
przybory do pisania.
Ćwiczenie 2
Analizując dokumentację sterowników PLC, określ w jaki sposób przesyłane są sygnały
wejściowe i wyjściowe. Określ zarówno rodzaje sygnałów jak i ich zakresy.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z rodzajami wejść sterowników PLC,
2) zapoznać się z rodzajami wyjść sterowników PLC,
3) określić wielkości fizyczne jakie są wykorzystywane do przesyłu sygnałów elektrycznych,
4) określić zakresy sygnałów wejściowych i wyjściowych.
Wyposażenie stanowiska pracy:
−
dokumentacja sterowników PLC,
−
przybory do pisania,
−
literatura.
Ćwiczenie 3
Uruchom układ regulacji, w którym elementem sterującym jest sterownik PLC.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić poprawność połączenia elementów wejściowych sterownika,
2) sprawdzić poprawność połączenia elementów wykonawczych,
3) porównać wartości napięć nominalnych elementów z wartością napięcia zasilającego,
4) podłączyć układ,
5) przesłać program do sterownika,
6) uruchomić sterownik,
7) sprawdzić działanie układu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Wyposażenie stanowiska pracy:
−
sterownik PLC połączony z 2 przyciskami sterującymi i co najmniej jednym elementem
wykonawczym,
−
program opisujący funkcje sterownika PLC w układzie,
−
komputer PC,
−
kabel do transmisji PLC – PC.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) rozróżniać przetworniki A/C i C/A?
2) opisać budowę sterownika PLC?
3) uruchomić układ sterowania ze sterownikiem PLC?
4) określić poziomu sygnałów?
5) załadować do pamięci sterownika program sterujący?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
4.3. Układy sterowania silnikami spalinowymi
4.3.1. Materiał nauczania
Układy automatyki spotykane na jednostkach pływających
W dobie rozwoju technik informatycznych i mikroprocesorowych na pokładach jednostek
pływających montuje się coraz więcej układów sterowania, które zastępują pracę marynarzy
oraz pomagają im eksploatować prawidłowo jednostkę. Układy sterowania te ułatwiają
i przyśpieszają wykonywanie określonych czynności. Układy te co jest ważne zastępują
marynarzy w warunkach szczególnie trudnych i niebezpiecznych. W niniejszym poradniku
przedstawię tylko kilka charakterystycznych układów sterowania stosowanych na pokładach
jednostek pływających.
Silnik główny – automatyka i podsystemy
Podstawowym napędem jednostki jest na ogół silnik spalinowy wysokoprężny Diesla.
Eksploatacja silnika wysokoprężnego napędowego wymaga zasilania w paliwo, powietrze oraz
smarowania i chłodzenia. Ponadto silnik napędowy jest wyposażony w urządzenia ciągłego
grzania oraz przesmarowania, tak aby utrzymać napęd w stałej gotowości do uruchomienia.
Do pomocniczych systemów sterowania silnika zalicza się instalacje zasilania, smarowania,
chłodzenia. Nadzorem i prawidłową pracą systemów pomocniczych zarządzają układy
automatyki urządzeń pomocniczych. Układy automatyki kontrolują parametry pracy
poszczególnych podsystemów i sterują nimi. Ze względu na konieczność zachowania ciągłości
sterowania w sytuacjach awaryjnych, wymagana jest możliwość przejścia w dowolnym
momencie na sterowanie ręczne. Do systemów pomocniczych silnika wysokoprężnego zalicza
się:
−
instalację oleju smarowego,
−
system wody chłodzącej słodkiej,
−
system sprężonego powietrza,
−
system paliwowy,
−
system podgrzewania i przesmarowania wstępnego.
Systemy pomocnicze zasilają silnik w paliwo, powietrze rozruchowe, smarują chłodzą lub
podgrzewają w następujących stanach pracy silnika: przed uruchomieniem, podczas pracy na
biegu jałowym, przy zmiennym obciążeniu, po zdjęciu obciążenia, oraz przed zatrzymaniem.
Instalacja oleju smarowego
Pompa główna tłocząca olej napędzana jest przez silnik główny statku. Pompa olejowa
zasysa olej z misy olejowej i tłoczy go poprzez trójdrożny zawór termostatyczny na chłodnicę
(wymiennik ciepła), a następnie przez filtr olejowy do silnika. Zawór termostatyczny zapewnia
stałą temperaturę oleju smarowego na wejściu do silnika (rys. 16). W odpowiednich miejscach
instalacji dokonywany jest pomiar temperatury i ciśnienia. Zatrzymanie silnika przez system
bezpieczeństwa następuje, gdy ciśnienie oleju spadnie poniżej poziomu alarmowego.
W systemie tym, oprócz pompy głównej obiegowej, silnik posiada dodatkową pompę,
spełniającą funkcję pompy wstępnego przesmarowania. Pompa ta napędzana jest silnikiem
elektrycznym. Wspomniana pompa uruchamiana jest w czasie postoju silnika lub przed
rozpoczęciem jego pracy. Wydatek tej pompy wynosi ok. 15–20% pompy głównej.
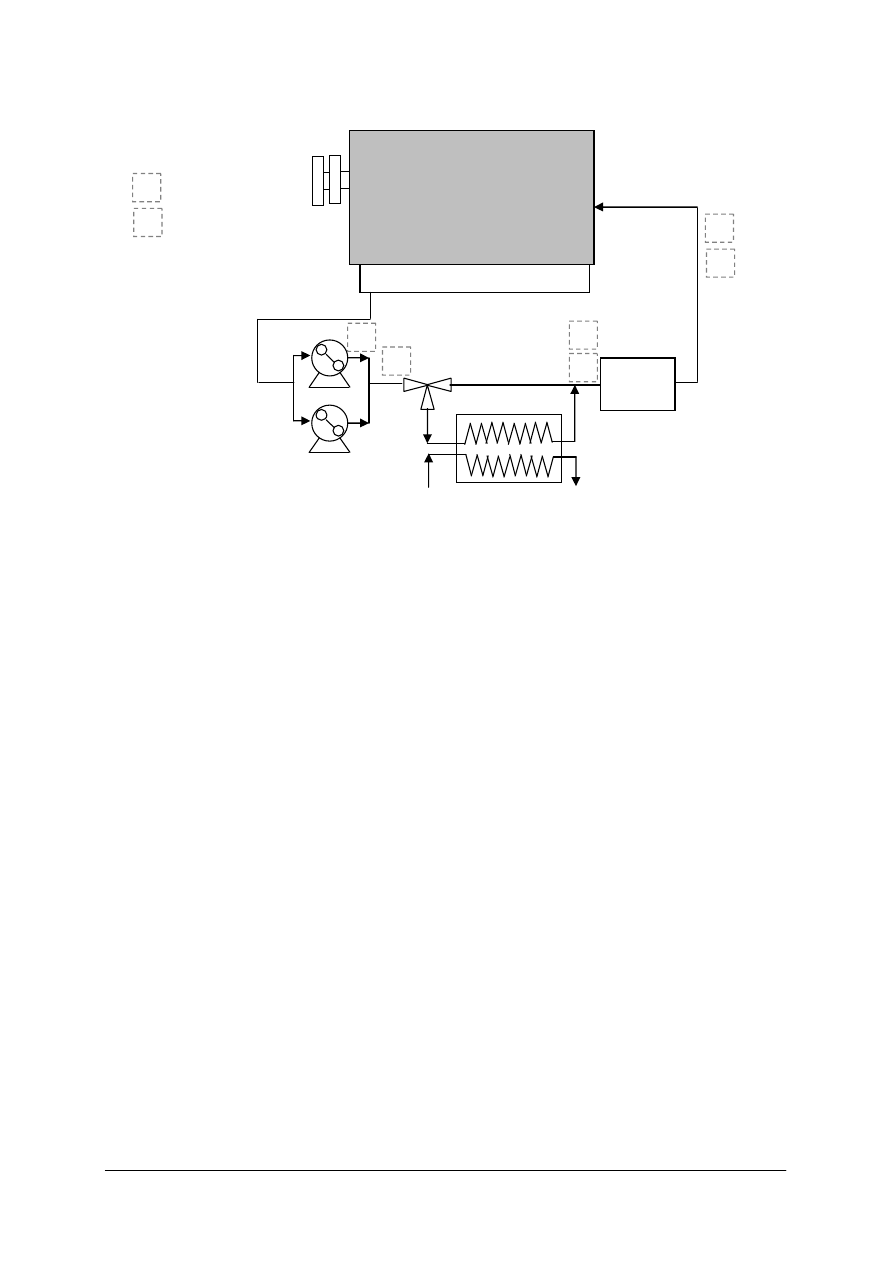
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Rys. 16. Instalacja oleju smarowego [9]
System wody chłodzącej słodkiej
Elektryczna pompa cyrkulacyjna tłoczy wodę do przestrzeni chłodzących poszczególne
cylindry, głowice oraz misę korbową. Następnie z kolektorów wylotowych woda płynie do
trójdrożnego zaworu termostatycznego, który kieruje ją – poprzez chłodnicę lub bezpośrednio
– na stronę ssącą pompy cyrkulacyjnej. Trójdrożny zawór termostatyczny zapewnia utrzymanie
stałej temperatury na wylocie wody chłodzącej. System chłodzenia silnika odpowietrzany jest
za pomocą rurociągu, podłączonego do zbiornika wyrównawczego. Ze zbiornika
wyrównawczego wyprowadzony jest rurociąg, połączony możliwie blisko strony ssącej pompy
cyrkulacyjnej. Zbiornik wyrównawczy służy do uzupełnienia wody w układzie oraz do
wytworzenia odpowiedniego ciśnienia po stronie ssącej pompy, co zapewnia prawidłową pracę
pompy przy wysokiej temperaturze wody chłodzącej oraz właściwe ciśnienie wody chłodzącej
w obiegu. W chłodnicy pośredni obieg wody morskiej chłodzi wodę słodką. Przykładowy
układ regulacji automatycznej temperatury wody chłodzącej silnik i system sterowania pracą
pomp w trybie stand by przedstawia rysunek 16. Sygnał sterujący (zwykle prądowy 4÷20 mA)
ze sterownika jest przesyłany do zaworu pneumatycznego trójdrożnego. Zmiana położenia
zaworu powoduje, że część wody przepływa przez chłodnicę, a pozostała – przez rurociąg
omijający (ang. by–pass). Powoduje to zmianę temperatury wody zasilającej jednej z pomp.
Sygnałami wyjściowymi mierzonymi do układu regulacji temperatury wody chłodzącej jest
mierzona temperatura wody na rurociągu przed i za silnikiem. W układzie regulacji
temperatury, oprócz podstawowej pętli, gdzie stabilizuje się temperaturę słodkiej wody
chłodzącej silnik, dodatkowo występuje sprzężenie od pozycji zaworu regulującego natężenie
przepływu wody chłodzącej z chłodnicy. Podwójna pętla: regulacji temperatury i pozycji
zaworu zapewnia poprawę jakości stabilizacji temperatury wody poprzez dokładne
pozycjonowanie zaworu regulującego. Szczególnie ma to zastosowanie wówczas, gdy
charakterystyka regulacyjna zaworu jest nieliniowa. W wypadku awarii, przerwy w zasilaniu
aktualnie pracującej pompy, uruchamiana jest automatycznie druga pompa. Gwarantuje to
ciągłość zasilania silnika w wodę chłodzącą.
Miska olejowa
Silnik główny
Filtr
oleju
P
T
P
T
T
P
P
T
– ciśnienie
– temperatura
chłodnica
pompa olejowa
główna
dodatkowa
pompa olejowa
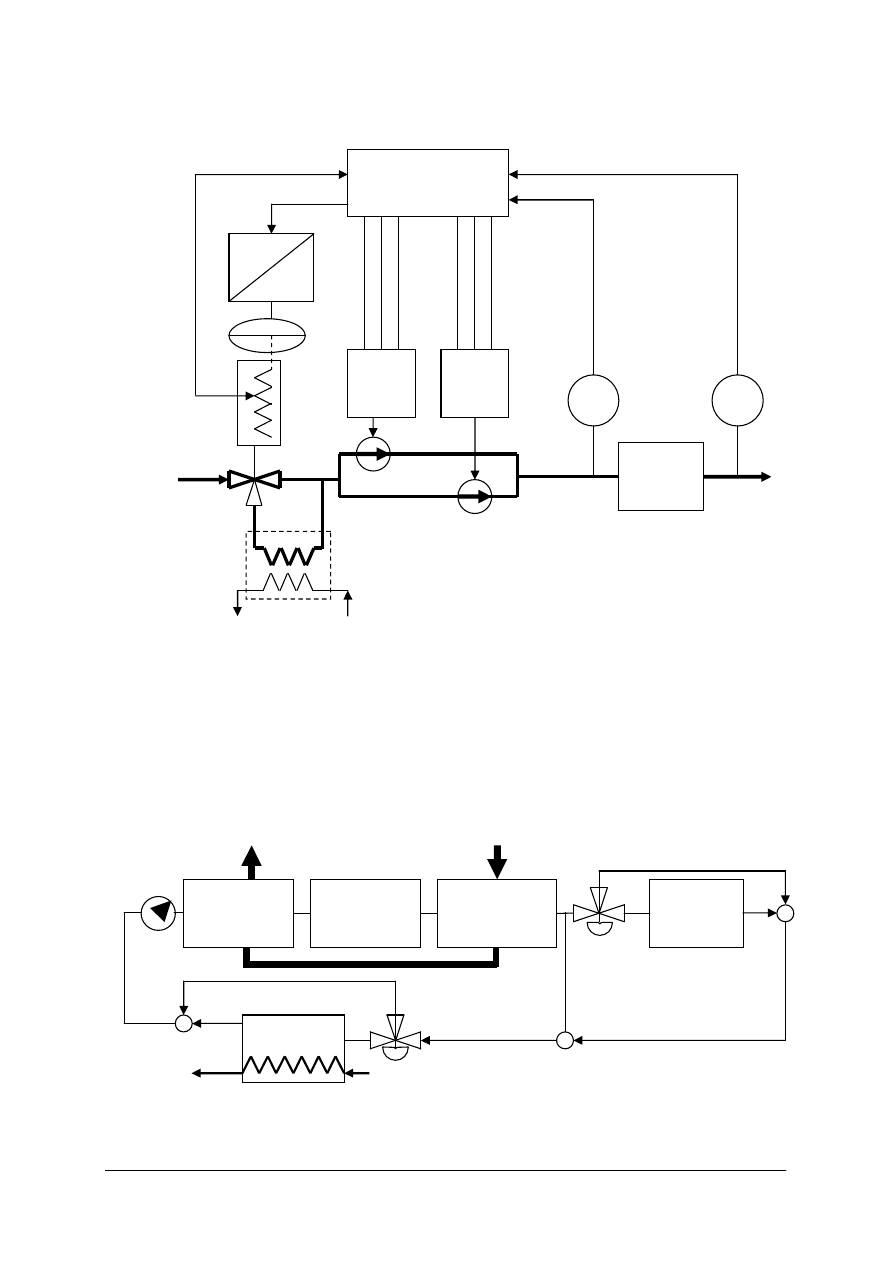
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Rys. 17.
Przykład układu sterowania pracą pomp w systemie stand–by
i sterowania temperaturą wody chłodzącej silnik
Na statkach spotyka się rozwiązania z centralnymi obiegami wody słodkiej zasilającymi
silniki zespołów i silnik główny. Częstym rozwiązaniem jest podział układu na dwa obiegi:
o temperaturze niskiej (LT) i wysokiej (HT).
Rys. 18. System chłodzenia z obiegiem LTiHT
Pozycja
zaworu
Sterownik
I
P
IN
OUT
Start /
Stop
silnika
Start /
Stop
silnika
TIC
TIC
IN
IN
Silnik
napędowy
ZP
Woda słodka z
chłodnicy
Wymiennik
ciepła
Woda
morska
Przetworniki
pomiarowe
Chłodnica
oleju
smarowego
Chłodzenie
silnika
II stopień
I stopień
Obwód HT
Obwód LT
Woda morska
Powietrze
doładowania
Chłodnica
powietrza
doładowania
Chłodnica
powietrza
doładowania

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Schemat chłodzenia z obiegiem o niskiej i wysokiej temperaturze oraz przepływ wody
przez poszczególne urządzenia przedstawia rysunek 17. System chłodzenia wodą składa się
z obwodu: wysokotemperaturowego i niskotemperaturowego.
Oba obwody są podłączone do silnika, gdzie obwód wysokotemperaturowy jest chłodzony
przez obwód niskotemperaturowy, który z kolei jest ponownie chłodzony przez zewnętrzny
centralny system chłodzenia Obwód niskotemperaturowy chłodzi powietrze doładowania oraz
olej smarowy.
System sprężonego powietrza
Instalacja powietrza sterującego i startowego dostarcza sprężone powietrze potrzebne do
rozruchu oraz sterowania pracą silnika. Sprężone powietrze do zespołu prądotwórczego
pochodzi zwykle z instalacji sprężonego powietrza silnika głównego. Objętość butli
sprężonego powietrza i zakres ciśnienia zależy od koniecznej liczby startów silnika, które są
wymagane przez towarzystwa klasyfikacyjne. Rozruch silnika sprzężonym powietrzem
następuje za pomocą zaworu rozruchowego powietrza startowego. Rozruch przeprowadza się
przy ciśnieniu powietrza startowego w butlach zwykle wynoszącym zwykle około 3 Mpa
(30 barów), a zapas sprężonego powietrza musi być taki, aby w wypadku nieudanych
automatycznych rozruchów była możliwość jeszcze trzykrotnego rozruchu ze stanowiska
lokalnego. Czas rozruchu jest ograniczony ze względu na ograniczony zapas powietrza, a zbyt
długi rozruch może spowodować wyczerpanie się zapasu powietrza w butlach.
Podczas rozruchu spada ciśnienie powietrza i aby wyrównać ten spadek (np. przy wartości
ok. 2,7 MPa) uruchamia się sprężarkę, a gdy ciśnienie nadal spada, aby uzupełnić znaczne
ubytki powietrza, włącza się następna sprężarkę.
Jeżeli prędkość silnika po rozruchu sprężonym powietrzem osiągnie około 30%
znamionowej prędkości ω
T
, to określa się, że silnik osiągnął prędkość zapłonową
(przy prędkości znamionowej ok. 750 obr/min, prędkość rozruchowa wynosi ok. 300 obr/min).
Po osiągnięciu prędkości większej od zapłonowej, następuje wyłączenie zaworu powietrza
startowego, a paliwo zostaje podane na wtryskiwacze przez pompy wtryskowe i silnik jest
doprowadzany do prędkości bliskiej znamionowej. W fazie początkowej rozruchu podana jest
zwiększona dawka rozruchowa paliwa, która później zostaje ograniczona przez zawór
ograniczenia rozruchowej dawki paliwa. Pomiar prędkości wykonuje się za pomocą prądniczki
tachometrycznej sprzężonej z wałem silnika. Przełączanie zaworów podczas rozruchu
następuje na podstawie pomiaru wartości prędkości. Od momentu osiągnięcia prędkości
znamionowej system bezpieczeństwa nadzoruje parametry pracy silnika – ciśnienie oleju
smarowego, temperaturę wody chłodzącej oraz stan przekroczenia prędkości obrotowej
silnika.
System paliwowy
Instalacja paliwowa zawiera rurociągi obiegowe, pompy paliwowe oraz system
wtryskiwania paliwa dla każdego cylindra. Urządzenie to składa się z pompy wtryskowej,
wysokociśnieniowego obwodu wtryskiwania oraz zaworu wtryskowego. Zainstalowany jest
również rurociąg zbierający przecieki oraz układ do kontroli ciśnienia w rurociągach
wysokociśnieniowych. Ciśnienie w rurociągach wysokociśnieniowych wynosi około
1,5÷2,0 MPa. W siłowniach zautomatyzowanych (bez czasowego nadzoru w siłowni)
przewody paliwowe wysokiego ciśnienia instaluje się w szczelnej osłonie (obudowie).
Z instalacji tej przecieki (np. spowodowane pęknięciem przewodu) odprowadzane są do
zbiorników przecieków, a przekroczenie określonego poziomu w zbiorniku jest
sygnalizowane. Alarm wysokiego poziomu zbiornika odpowiada przeciekowi instalacji
paliwowej wysokiego ciśnienia. Silniki mogą być zasilane paliwem lekkim, ciężkim oraz

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
mieszanym. W wypadku stosowania przełączania paliwa z lekkiego (PL) na ciężkie (PC) i na
odwrót określa się minimalną wartość obciążenia (np. ok. 40%), przy którym może nastąpić
przełączenie paliwa PL/PC.
Ze względów ekonomicznych coraz częściej stosuje się silniki napędowe wyłącznie na
paliwo ciężkie, co wymaga określonej instalacji przygotowującej i zasilającej w paliwo. Silniki
takie są uruchamiane, zatrzymywane i pracują w trybie normalnym, (tzn. – przy zmiennym
i częściowym obciążeniu) na jednym rodzaju paliwa. Rozwiązanie to posiada kilka zalet:
wszystkie silniki główne oraz pomocnicze działają na tym samym paliwie, zatem na statek
bunkruje się tylko jeden rodzaj paliwa ciężkiego oraz nie jest wymagane wyposażenie
mieszające. W tym wypadku paliwo wymaga procesu podgrzewania i oczyszczania.
W pierwszej fazie w zbiornikach osadowych paliwo ciężkie podlega wstępnej separacji szlamu
i wody w nim zawartej przy stałej temperaturze paliwa w granicach 60÷70°C. Zbiorniki
osadowe pełnią dodatkowo funkcję zbiorników buforowych. Następnie paliwo podlega
wirowaniu. Wirówki pracują w trybie oddzielania wody i szlamu (puryfikacji) i zwiększonej
dokładności odwirowywania (klaryfikacji). Sprawność wirowania i przepustowość zależy od
temperatury paliwa w stosunku do jego lepkości. W wypadku paliw o dużej lepkości
temperatura wirowania (temperatura paliwa musi być odpowiednia w stosunku do jego
lepkości) musi być zwiększaną, a przepustowość zmniejszana w stosunku do nominalnej
pojemności wirówki. Temperatura wirowania jest utrzymywana w przedziale ±2°C przez układ
automatycznej stabilizacji temperatury w podgrzewaczu. Instalacja dostarczania paliwa
zapewnia odpowiedni przepływ, ciśnienie, lepkość oraz filtrowanie na dolocie do silnika.
Instalacja paliwa ciężkiego wymaga ciśnieniowego systemu zasilania. W systemie tym
wyróżnia się obwód wysokociśnieniowy oraz obwód niskociśnieniowy. Wysokociśnieniowy
pomocniczy obwód powinien zapewnić odpowiednie ciśnienie na dolocie do każdego silnika
(0,÷1,0 Mpa, 8÷10 bar), przepływ od 3 do 4 razy maksymalnego zużycia paliwa oraz
wymaganą lepkość na dolocie do każdego silnika. Obwód niskociśnieniowy obejmuje swoim
działaniem wirowanie i filtrację paliwa. Nadmiar paliwa dostarczanego do silnika jest
odprowadzany przez rurociąg przelewowy połączony ze zbiornikiem przelewowym, skąd
wychodzi na rurociąg zwrotny do zbiornika osadowego. Wszystkie instalacje paliwa ciężkiego:
rurociągi przelewowe i zwrotne, zbiornik przechowywania paliwa zbiornik dzienny i
przelewowy są podgrzewane przez parę lub olej grzewczy. W systemie paliwowym występują
układy sterujące jego temperaturę, ciśnienie oraz wybór, z którego zbiornika jest ono
pobierane.
System podgrzewania i przesmarowania wstępnego
Przed uruchomieniem – w stanie „gorącej rezerwy” – silniki spalinowe muszą być
cyklicznie podgrzewane oraz przesmarowane. Do podgrzania silnika stosuje się wodę ciepłą
(50÷95°C). Woda ciepła z podgrzewacza jest tłoczona przez elektryczną pompę obiegową
małej mocy (tłoczenie w przybliżeniu 2÷6 m
3
/h przy ciśnieniu 1 bar) i wchodzi do obwodu
chłodzenia silnika poprzez rurociąg podgrzewania, przepływając przez głowice cylindrowe,
tuleje i docierając do pompy wody chłodzącej. Po zatrzymaniu silnika automatyczne
podgrzewanie jest włączane. Temperatura (min. 50°C) na wylocie z układu podgrzewania
silnika jest stabilizowana automatycznie przez zawór termostatyczny. Woda może być
podgrzewana przez instalację parową olejową i grzałki elektryczne w podgrzewaczu
elektrycznym. W wypadku połączonej pracy systemów pomocniczych silników, do podgrzania
silników, będących w stanie zatrzymania, można wykorzystać wodę chłodzącą z pracujących
silników, wprowadzając ją bezpośrednio do systemu podgrzewania. Przesmarowanie silnika
realizuje się z wykorzystaniem obiegu oleju smarowego. Cyrkulację oleju zapewnia pompa
olejowa małej mocy, a do pogrzania oleju stosowane są grzałki elektryczne znajdujące się w

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
karterze silnika lub instalacja parowa. Niezależnie od fazy cyklicznego przesmarowania silnika
przed jego uruchomieniem zawsze następuje chwilowe załączenie wstępnego przesmarowania.
Układy automatyki silnika napędowego
W zakres funkcji układu automatyki silnika spalinowego – napędowego wchodzi:
−
przygotowanie i nadzorowanie stanu silnika przed uruchomieniem, wstępne podgrzewanie
oraz przesmarowanie silnika, a także przygotowanie paliwa (temperatura, lepkość,
ciśnienie), co jest szczególnie istotne przy zasilaniu silnika paliwem ciężkim,
−
uruchomienie i zatrzymanie silnika (start/stop) – sterowana jest dawka paliwa
rozruchowego oraz proces wstępnego przesmarowania i przełączenia rodzaju paliwa,
−
powtórzenie startu po nieudanej próbie; gdzie ogranicza się liczbę startów do trzech,
niektóre konstrukcje silników wymagają zatrzymania silnika na okres 1–2 min po
nieudanym starcie, w tym wypadku układ dokonuje tylko jednego uruchomienia,
−
nadzór parametrów i stanu silnika po uruchomieniu przez system bezpieczeństwa,
−
alarmowanie w sytuacji przekroczenia parametrów,
−
regulacja temperatury oleju smarowego i wody chłodzącej,
−
regulacja prędkości obrotowej silnika,
−
schładzanie silnika po usunięciu obciążenia przed zatrzymaniem silnika (ok. 10 min. pracy
na wolnym biegu).
Układ alarmowy i układ bezpieczeństwa kontrolują warunki pracy silnika w różnych
stanach eksploatacji. Układy sterowania przede wszystkim regulują prędkość obrotową
w wypadku zmian obciążenia.
Układ automatyki uzupełnienia wody zbiorniku obiegowym
Zadaniem tego układu jest utrzymanie określonej ilości cieczy w zbiorniku. Sygnały
o ustalonym poziomie maksimum i minimum są generowane przez dwustronne czujniki
poziomu cieczy zamontowane w zbiorniku – sygnały tych czujników podawane do modułu
regulatora (sterownik PLC). W przypadku obniżenia się poziomu poniżej ustalonej wartości
min regulator powoduje otwarcie zaworu uzupełniającego i uruchomienie pompy
uzupełniającej ciecz zbiorniku. Uzupełnienie trwa do momentu osiągnięcia przez ciecz
poziomu górnego.
Układ automatycznego uzupełniania sprężonego powietrza
W tym układzie regulator steruje pracą sprężarki uzupełniającej sprężone powietrze
w zbiornikach. Powietrze to może być wykorzystywane do napędu siłowników
pneumatycznych, sterowania awaryjnego zbiorników wypornościowych lub rozruchu silnika
głównego. Układ powinien utrzymywać ciśnienie w zbiornikach na poziomie pomiędzy
minimalnym a maksymalnym. Sterownik oprócz kontroli ciśnienia, również:
−
steruje przepływem wody chłodzącej pompę w czasie pracy sprężarki,
−
odwadnia kolejno poszczególne stopnie sprężania – zgodnie z algorytmem opracowanym
na podstawie instrukcji eksploatacji,
−
zlicza czas pracy sprężarki,
−
wyłącza natychmiast sprężarkę po przekroczeniu maksymalnej dopuszczalnej wartości
ciśnienia w zbiornikach,
−
wyłącza sprężarkę po przekroczeniu dopuszczalnego ciśnienia na którymkolwiek ze stopni
sprężarki.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Układ automatycznego podgrzewania silników głównych
Uruchamianie silników wysokoprężnych może być dokonywane wtedy, gdy posiadają
określoną przez producenta odpowiednią temperaturę. Jeżeli nie posiadają takiej temperatury
należy je podgrzać. Są dwa sposoby podgrzewania silników: wodą chłodzącą pracującego
silnika pomocniczego lub wodą podgrzewaną w zbiornikach obiegowych i przepompowaną
przez kanały chłodzące silnika głównego.
Moduł sterujący podgrzewaniem wody włącza się samoczynnie po zadaniu komendy
„przygotowanie siłowni do uruchomienia” – jeżeli temperatura silników jest niższa od
wymaganej.
Wyłącza się natomiast samoczynnie, jeżeli temperatura wody na wyjściu z silnika jest
wyższa od zadanej lub gdy poziom wody w zbiorniku ogrzewanym jest zbyt niski. Z chwilą
osiągnięcia przez wodę temperatury minimalnej, regulator ponownie rozpoczyna podgrzewanie
wody.
Po osiągnięciu tej temperatury przez odpowiednie styczniki realizowane jest odłączenie
grzałek. Woda jest dalej przepompowywana przez silnik, aż do chwili osiągnięcia przez wodę
temperatury minimalnej. Kiedy to nastąpi wyłączane są pompy i ponownie załączane są grzałki.
Proces ten powtarza się cyklicznie, aż do uzyskania odpowiedniej temperatury bloku silnika.
Podgrzewany jest również olej smarowy w celu zmniejszenia jego lepkości.
Należy uważać aby: nie przekroczyć max temp. do jakiej olej może być podgrzany, nie
przekroczyć minimalnego poziomu oleju w zbiorniku obiegowym
Automatyka uruchomienia OSS
Rozkaz uruchomienia silnika może być wykonany dopiero po spełnieniu wszystkich
operacji przygotowawczych poprzedniego rozkazu. Po naciśnięciu przycisku start na pulpicie
dźwignia sterująca prędkości obrotowej jest ustawiona w położenie rozruchowe, a dźwignia
sprzęgła na stop. Gdy spełnione są odpowiednie warunki: temperatura silnika, temperatura
oleju smarowego i odpowiednie położenie dźwigni sterującej i sprzęgła, przekaźnik włącza
zespół wstępnego przesmarowania, pompowania paliwa i pompowania oleju smarnego.
Po osiągnięciu przez te media odpowiednich ciśnień, zostaje uruchomione zawory rozruchowe,
silnik rozpoczyna pracę – ustala się prędkość obrotowa na poziomie jałowym stabilnym.
Sterownik po uruchomieniu wyłącza zespół wstępnego przesmarowania oleju i paliwa. Ich
blokada trwa przez cały okres pracy silnika. W dalszej części za smarowanie silnika oraz za
dostarczanie paliwa do silnika odpowiadają układy zasilania silnika w stanie pracy.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie parametry są mierzone w układzie sprężonego powietrza?
2. Jakie są układy i jakie zadania realizuje automatyka w układzie smarowania silnika
głównego?
3. Jakie typy układów sterowania stosowane są w silniku głównym?
4. Jakie urządzenia wykonawcze spotyka się w układzie chłodzącym silnika głównego?
5. Jakie funkcje pełnią obwody zabezpieczające?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
4.3.3. Ćwiczenia
Ćwiczenie 1
Opisz wszystkie czujniki jakie zostały wbudowane w układzie chłodzenia silnika
głównego. Określ, jakie wielkości one mierzą.
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się ze schematami ideowymi układu chłodzenia silnika głównego,
2) określić znaczenie symboli elementów układu automatyki odpowiedzialnej za chłodzenie,
3) zaznaczyć wszystkie zainstalowane czujniki,
4) na podstawie symboli, dokumentacji silnika lub kart katalogowych określić funkcje jakie
realizują,
5) opisz zainstalowane czujniki.
Wyposażenie stanowiska pracy:
−
schematy ideowe układów chłodzenia silników okrętowych,
−
przybory do pisania,
−
karty katalogowe czujników i elementów automatyki.
Ćwiczenie 2
Na podstawie dokumentacji technicznej określ okoliczności w jakich zostanie ogłoszony
alarm „brak smarowania silnika”, opisz następstwa takiego alarmu.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z dokumentacją silnika, a w szczególności ze schematem ideowym układu
smarowania,
2) wyszukać wszystkie czujniki pomiarowe wbudowane w układ smarowania,
3) określić nastawy regulatorów, przy których układy automatyki wysyłać będą alarm,
4) odnaleźć elementy wykonawcze, które będą pobudzone w czasie alarmu „brak
smarowania”,
5) opisać zachowanie automatyki w układzie sterowania,
Wyposażenie stanowiska pracy:
−
schemat ideowy układu smarowania silnika spalinowego,
−
dokumentacja techniczno-ruchowa silnika napędowego,
−
przybory do pisania.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) rozpoznawać elementy układów automatyki?
2) określić funkcje jakie realizują poszczególne elementy układów regulacji?
3) opisać podstawowe układy sterowania układami napędowymi na statkach?
4) zidentyfikować na planach i schematach układy automatycznej regulacji?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
4.4. Układy automatyki elektrowni okrętowej
4.4.1. Materiał nauczania
Zgodnie z wymaganiami stawianymi urządzeniom automatyki statek przystosowany do
eksploatacji na morzu powinien posiadać podstawowe źródło zasilania w energię elektryczną
składające się co najmniej z dwóch prądnic z niezależnym napędem o mocy wystarczającej do
zasilania wszystkich niezbędnych urządzeń elektrycznych. Moc źródła zasilania musi zapewnić
prawidłowe funkcjonowanie statku podczas normalnej żeglugi, manewrów, w sytuacjach
awaryjnych, tj. w czasie zagrożenia bezpieczeństwa – pożaru, przebicia kadłuba itp.
Liczbę oraz moc zespołów prądotwórczych wchodzących w skład podstawowego źródła
energii elektrycznej ustala się w taki sposób, aby w razie awarii jednej prądnicy pozostałe
źródła zapewniały:
−
możliwość pracy wszystkich ważnych urządzeń niezbędnych do ruchu statku
z zachowaniem dostatecznych warunków socjalno-bytowych załogi,
−
niedopuszczenie do spadków napięcia oraz częstotliwości w sieci przy uruchamianiu
silnika elektrycznego o największej mocy, prądzie rozruchowym i najcięższym rozruchu,
−
utrzymanie właściwych warunków przewożenia ładunku (np. zasilanie urządzeń
chłodniczych),
−
zasilanie urządzeń elektrycznych niezbędnych do rozruchu głównego układu napędowego,
np. silnika głównego.
Rozwiązanie techniczne zautomatyzowanej elektrowni statku powinno zapewniać ciągłość
zasilania energią elektryczną zgodnie z następującymi wymaganiami:
−
na statkach, na których zapotrzebowanie na energię elektryczną pokrywane jest normalnie
przez pracę jednego zespołu prądotwórczego, należy zastosować odpowiednie
rozwiązania umożliwiające w razie awarii tego zespołu automatyczne uruchomienie
i załączenie do sieci zespołu rezerwowego o mocy wystarczającej do zapewnienia napędu i
sterowania statkiem oraz do zapewnienia jego bezpieczeństwa, włączając w to
automatyczne
ponowne
uruchomienie
ważnych
mechanizmów
pomocniczych,
z zachowaniem – jeżeli to niezbędne – odpowiedniej sekwencji tego uruchomienia.
Rezerwowe źródło zasilania powinno być zdolne do przejęcia obciążenia w czasie nie
dłuższym niż 45 sekund,
−
na statkach, na których zapotrzebowanie na energię elektryczną pokrywane jest normalnie
przez dwa lub więcej zespołów prądotwórczych pracujących równolegle, należy
zastosować takie rozwiązania (np. automatyczne odłączanie odbiorników mniej ważnych),
aby w razie awarii jednego z pracujących zespołów wykluczyć przeciążenie pozostałych i
zapewnić zachowanie łączności, napędu oraz sterowności oraz bezpieczeństwa statku.
Jeżeli zapotrzebowanie na energię elektryczną pokrywane jest normalnie pracą jednego
zespołu prądotwórczego i zespół ten napędzany jest turbiną parową, rezerwowy zespół
prądotwórczy powinien być napędzany silnikiem spalinowym.
Automatyzacja systemu elektroenergetycznego ma zapewniać bezpieczeństwo zasilania
wszystkich urządzeń okrętowych w energię o określonych parametrach oraz ekonomiczne
eksploatowanie systemu elektroenergetycznego statku bez konieczności stałego nadzoru
załogi.
Zasady
pracy
i
wymagania
stawiane
zautomatyzowanemu
systemowi
elektroenergetycznemu statku zawierają przepisy towarzystw klasyfikacyjnych, w tym przepisy
Polskiego Rejestru Statków (PRS).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
Bezobsługowy
(bezwachtowy)
charakter
pracy
zautomatyzowanego
systemu
elektroenergetycznego musi uwzględniać wszystkie stany pracy oraz możliwe zakłócenia.
Wszystkie normalne stany pracy urządzeń: uruchamianie, rozbieg, bieg jałowy, zatrzymanie,
synchronizacja, włączenie prądnicy do sieci, rozdział mocy oraz stany wywołane zmianą
obciążenia lub zakłóceniami muszą być realizowane w sposób automatyczny.
Układy bezpieczeństwa zespołów prądotwórczych w wypadku występowania zakłóceń
powodujących przekroczenie granicznych parametrów pracy powinny z pewnym opóźnieniem
zatrzymać zespół.
Do funkcji i zadań zautomatyzowanego systemu elektroenergetycznego należy zaliczyć:
−
zapewnienie właściwej jakości energii elektrycznej – odpowiedniej wartości napięcia
wytwarzanego i częstotliwości w stanach ustalonych i nieustalonych pracy systemu,
zachowanie sinusoidalnego przebiegu napięcia,
−
zapewnienie bezpieczeństwa zasilania bez względu na występowanie w systemie
elektroenergetycznym statku różnego rodzaju zakłóceń,
−
zapewnienie jak najkrótszej przerwy w zasilaniu w razie zaniku napięcia na szynach
głównych,
−
zapewnienie ciągłości pracy elektrowni w wypadku awarii pojedynczych elementów w taki
sposób, aby uszkodzone elementy nie powodowały uszkodzeń, przerw w pracy i zakłócać
innych części okrętowego systemu elektroenergetycznego,
−
zabezpieczenie systemu elektroenergetycznego przed błędami obsługi, które mogłyby
spowodować uszkodzenia (w razie błędnych operacji system musi być tak zabezpieczony,
aby nie było możliwości odłączenia ważnych jego części),
−
ekonomiczne wytwarzanie i użytkowanie energii elektrycznej minimalizujące koszty
eksploatacyjne statku,
−
uwzględnianie i przewidywanie zakłóceń w celu uniemożliwienia ich ewentualnego
wpływu na przebieg procesu, tak aby uniknąć awarii.
Zgodnie z przepisami towarzystw klasyfikacyjnych funkcjom sterowania, zabezpieczenia,
alarmowania oraz zarządzania mocą systemu elektroenergetycznego można przypisać
określone zadania.
−
funkcje sterowania na poziomie sterowników obejmują synchronizację zespołów przy
pracy równoległej, regulację prędkości obrotowej i napięcia prądnicy, rozdział mocy
czynnej (obciążenia) i biernej, sterowanie pracą silnika – start, stop, przesmarowanie,
przełączanie rodzaju paliwa.
−
funkcje zabezpieczające odnoszą się do zabezpieczenia silnika napędowego zespołu
(nadobroty, ciśnienie oleju, przepływ wody chłodzącej) i prądnicy (zwarcie, moc zwrotna).
−
funkcje alarmowania służą do sygnalizowania przekroczenia parametrów pracy tych
urządzeń.
−
funkcje zarządzania mocą wiąże zadania zliczania obciążenia, zależności pomiędzy
obciążeniami mocą czynną i bierną, kontrolą zaniku napięcia, wartości napięcia
częstotliwości, mocy oraz kontrolą czasu realizacji zadań.
Zadania te uwzględniają nadrzędność funkcji alarmowania i zarządzania bezpieczeństwem
nad systemem sterowania.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Układ alarmowy i układ bezpieczeństwa pracy prądnicy
Prądnice zespołów prądotwórczych podstawowych i awaryjnych połączone są z siecią
energetyczną przez rozdzielnicę główną lub awaryjną. Układy alarmowe i bezpieczeństwa
prądnicy oraz rozdzielnicy kontrolują: oporność izolacji (wartość minimalną), napięcie
(minimalne i maksymalne), częstotliwość (minimalną i maksymalną), przeciążenia, stan
zwarcia, prądy w poszczególnych fazach, moc zwrotną czynną i bierną. Prądnice pracujące
równolegle posiadają zabezpieczenia przeciążeniowe – nadprądowe, zwarciowe, kierunkowe
(prądu lub mocy zwrotnej) i podnapięciowe. W wypadku kontroli przeciążenia układy
automatyki analizują natężenia prądu w poszczególnych fazach i czasy występowania
przeciążenia. Wartości zabezpieczeń przeciążeniowych oraz zwłoki czasowe muszą być tak
dobrane, aby moc silnika napędowego była wystarczająca do zadziałania zabezpieczenia.
W większości układów występuje dodatkowe zabezpieczenie i blokada połączenia
z lądem. Zwykle układy automatyki prądnic posiadają funkcje odłączania samoczynnego
i wybiórczego odbiorników mniej ważnych w wypadku wystąpienia przeciążenia prądnicy.
Zabezpieczenie podnapięciowe określa warunki załączenia i wyłączenia prądnicy
w zależności od wartości napięcia i czasu występowania określonego napięcia.
Automatyczna synchronizacja prądnic
Załączenie dodatkowych odbiorników w sieci układu elektroenergetycznego powoduje
wzrost zapotrzebowania na moc. Nadrzędny układ kontroli rezerwy mocy po przekroczeniu
granicznej wartości mocy generuje sygnał do uruchomienia kolejnego zespołu
prądotwórczego. Załączenie prądnicy do pracy równoległej z siecią elektroenergetyczną statku
lub inną prądnicą staje się możliwe po spełnieniu następujących warunków:
−
kształty krzywych napięcia załączanej prądnicy i sieci powinny być jednakowe,
−
w wypadku prądnic trójfazowych konieczne jest zachowanie identycznej kolejności faz
napięcia,
−
wartości skuteczne napięć powinny być sobie równe,
−
częstotliwości powinny być sobie równe,
−
przesunięcie fazowe pomiędzy wektorami napięć powinno być sprowadzone do zera lub
mieć odpowiednio niską wartość.
Warunkiem synchronizacji jest równość napięć chwilowych w odpowiednich fazach.
Pierwsze dwa warunki są spełnione przez właściwą konstrukcję prądnic i odpowiedni montaż
instalacji. Pozostałe warunki realizuje układ synchronizacji automatycznej. Wyłącznik prądnicy
wraz z napędem charakteryzuje się własnym czasem działania, który należy uwzględnić w
procesie automatycznej synchronizacji.
Po starcie silnika Diesla i po wzbudzeniu prądnicy regulator prędkości obrotowej reguluje
częstotliwość prądnicy tak, aby była bliska częstotliwości sieci (szyn).
W okrętowych systemach elektroenergetycznych proces synchronizacji musi przebiegać
w sposób ciągły ze względu na to, że częstotliwość sieci może być zmienna na skutek stanów
przejściowych i skoków obciążenia. Moc pojedynczych odbiorników energii elektrycznej jest
często porównywalna z mocą znamionową zespołów elektroenergetycznych. Ciągła zmiana
obciążenia wiąże się z przypadkowym włączaniem lub wyłączaniem silników asynchronicznych
dużej mocy. Z kolei w systemach zasilanych przez prądnicę wałową w razie silnego falowania
morza może wystąpić znaczna nierówność prędkości obrotowej silnika napędowego. Zmiana
prędkości obrotowej może spowodować przejściowe zmiany napięcia dochodzące do 15%
wartości znamionowej i częstotliwości wynoszące od 3 do 6% wartości znamionowej.
Należy również zwrócić uwagę na fakt, że na przebieg procesu synchronizacji ma wpływ
nierównomierne obciążenie poszczególnych faz wywołujące asymetrię napięcia. W większości
wypadków w systemie elektroenergetycznym statku warunek równości amplitudy napięć
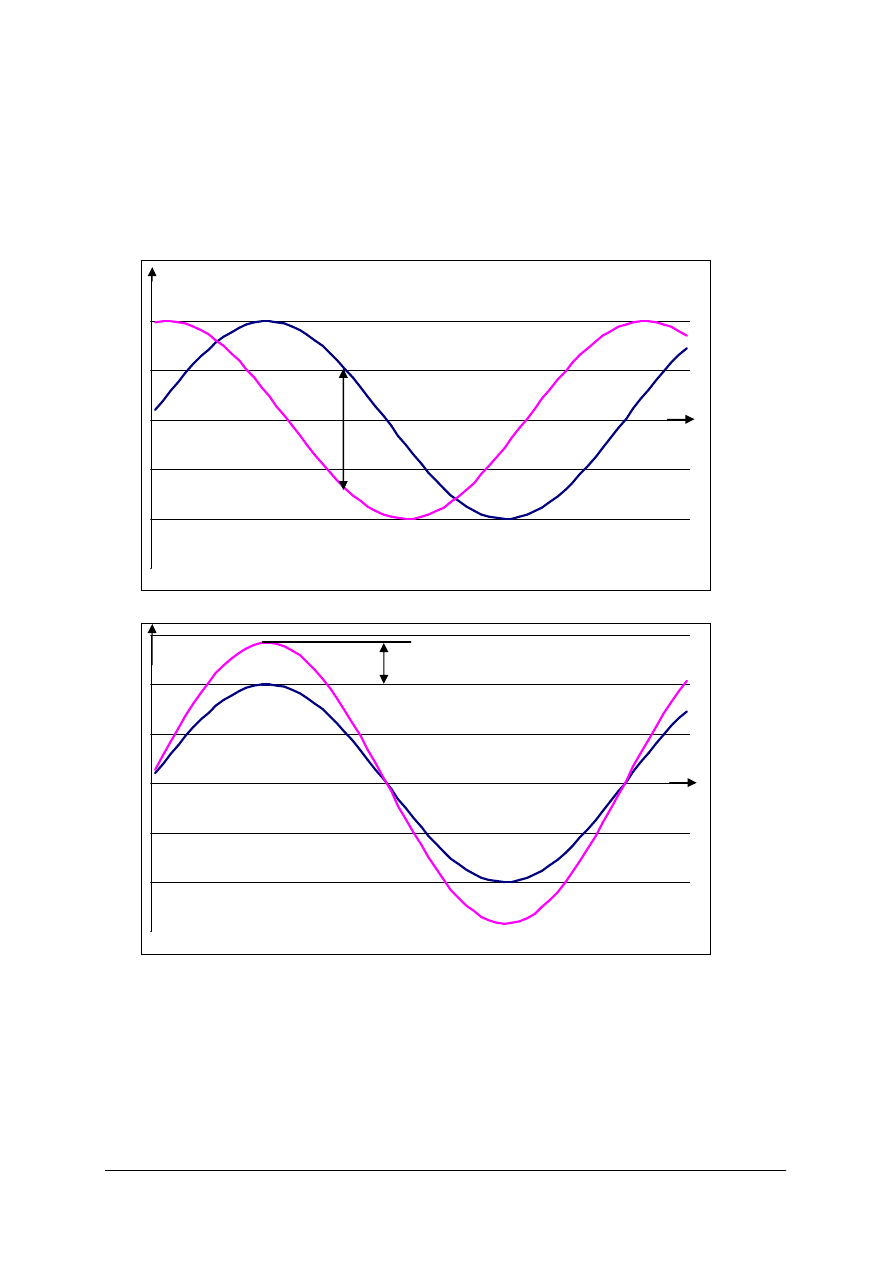
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
prądnicy i sieci, ze względu na układ regulacji napięcia prądnicy podstawowego zespołu
prądotwórczego, można uważać za spełniony lub prawie spełniony. Porównując na rysunku 19
przebieg napięć prądnicy i szyn, przy różnicy fazy i różnicy amplitudy napięć, można
stwierdzić, że większe zaburzenia w procesie synchronizacji powoduje różnica fazy. A zatem
najważniejszym działaniem w procesie synchronizacji jest sprowadzenie do zera przesunięcia
fazy.
- 1 , 5
- 1
- 0 , 5
0
0 , 5
1
1 , 5
1
2
3
4
5
6
7
8
9
1 0
1 1
1 2
1 3
1 4
1 5
1 6
1 7
1 8
1 9
2 0
2 1
2 2
2 3
2 4
2 5
2 6
2 7
2 8
2 9
3 0
3 1
3 2
3 3
3 4
3 5
3 6
3 7
3 8
3 9
4 0
4 1
4 2
4 3
4 4
4 5
4 6
4 7
4 8
4 9
5 0
5 1
5 2
5 3
5 4
5 5
5 6
5 7
5 8
5 9
6 0
6 1
6 2
6 3
6 4
6 5
6 6
6 7
6 8
6 9
7 0
7 1
- 1 , 5
- 1
- 0 , 5
0
0 , 5
1
1 , 5
1
2
3
4
5
6
7
8
9
1 0
1 1
1 2
1 3
1 4
1 5
1 6
1 7
1 8
1 9
2 0
2 1
2 2
2 3
2 4
2 5
2 6
2 7
2 8
2 9
3 0
3 1
3 2
3 3
3 4
3 5
3 6
3 7
3 8
3 9
4 0
4 1
4 2
4 3
4 4
4 5
4 6
4 7
4 8
4 9
5 0
5 1
5 2
5 3
5 4
5 5
5 6
5 7
5 8
5 9
6 0
6 1
6 2
6 3
6 4
6 5
6 6
6 7
6 8
6 9
7 0
7 1
Rys. 19. Przebieg napięć prądnicy i szyn przy różnicy fazy oraz napięć
Zgodnie z przepisami towarzystw klasyfikacyjnych zaleca się tak dobrać konstrukcyjnie
zespoły i układy automatyki, by skuteczna synchronizacja następowała w przedziałach
dopuszczalnej minimalnej i maksymalnej częstotliwości szyn. W sytuacji gdy częstotliwości
prądnicy f
ge
i szyn f
szyn,
są zgodne lub różnią się nie więcej niż to jest dopuszczalne, prądnica
może być załączona z chwilą zrównania przesunięć fazowych obu napięć. Zwykle w celu
ΔU
ΔU
ge
ΔU
sz
U
t
ΔU
ΔU
ge
ΔU
sz
t
U
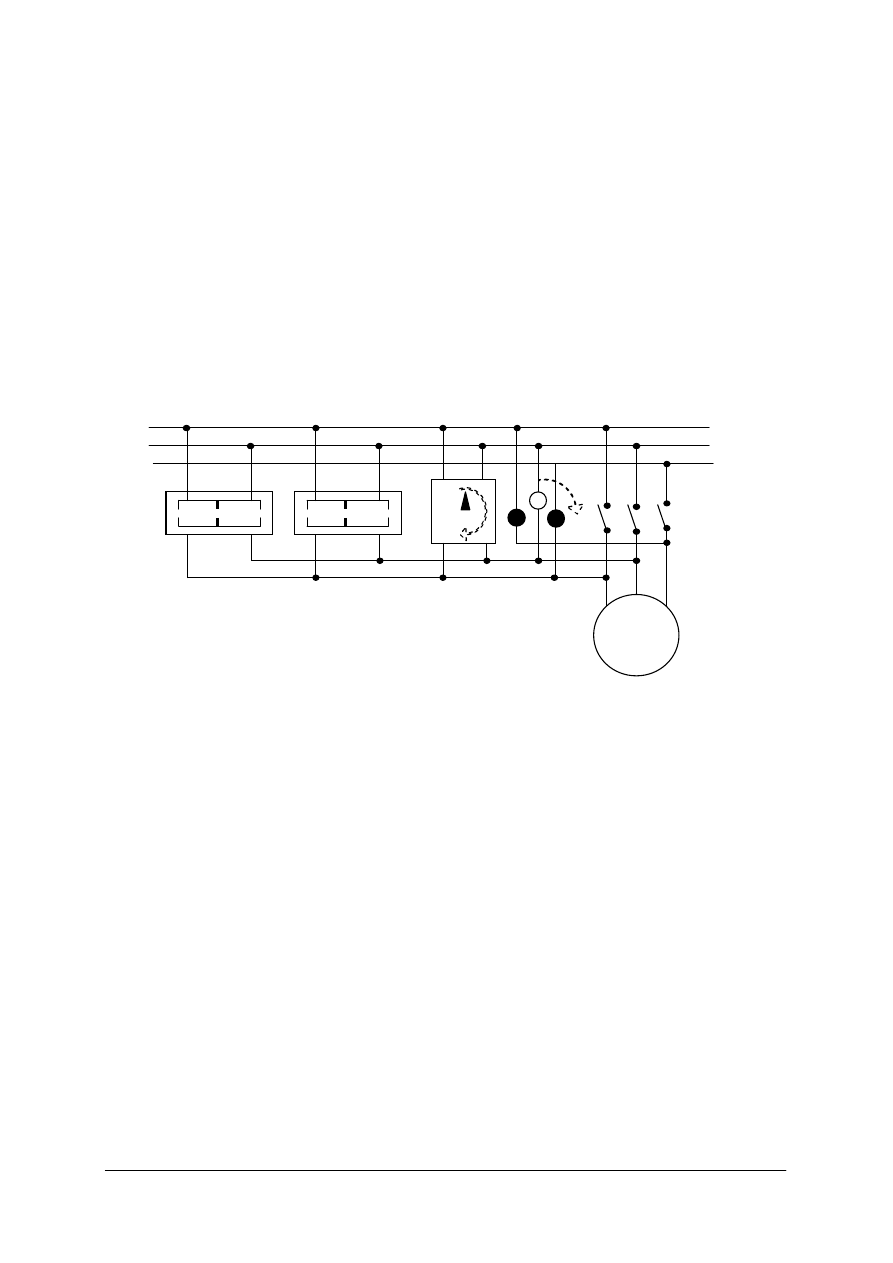
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
osiągnięcia możliwie krótkiego czasu synchronizacji nastawia się stałą różnicę między
f
ge,
i f
szyn
.
Detektor synchronizacji kontroluje warunki synchronizacji (amplitudy i fazy) i załącza
prądnice na szyny. Zadajnik prędkości obrotowej silnika, regulując częstotliwość, ma za
zadanie sprowadzenie fazy do zera.
Do synchronizacji zwykle stosuje się zasadę „synchronizacji na ciemno” lub „światła
wirującego”. Poniżej, na rysunku 20, pokazano zasadę podłączenia podstawowych przyrządów
niezbędnych podczas synchronizacji prądnicy z szynami głównymi z wykorzystaniem
„wirującego światła” i synchronoskopu (kolumna synchronizująca). Na wspomnianym rysunku
odpowiednio 1 – t o miernik wskazujący częstotliwość napięcia szyn głównych oraz napięcia
prądnicy, 2 – miernik wskazujący aktualną wartość napięcia szyn głównych i prądnicy, 3 –
synchronoskop wyposażony we wskaźnik diodowy, pokazujący bieżącą różnicę faz pomiędzy
napięciem prądnicy a napięciem szyn głównych, 4 – lampki służące do synchronizacji prądnicy
na „światło wirujące".
Rys. 20. Zasady podłączenia przyrządów podczas synchronizacji.[9]
Synchronoskop jest głównym instrumentem służącym do synchronizacji ręcznej. Lampki
służące do synchronizacji mogą być uważane za zapasowe (pomocnicze) w stosunku do
synchronoskopu. Zarówno synchronoskop, który składa się z szeregu świecących diod, jak
i lampki służące do synchronizacji mają tę samą podstawową zasadę, tj. są podłączone do faz
w taki sposób, aby osiągnąć efekt wirowania. Są one ułożone w kształt trójkąta i, świecąc, dają
efekt rotacyjny. Lampki są podłączone tak, że H1 i H3 powinny świecić, podczas gdy H2
zostaje wygaszona, kiedy prądnica jest synchronizowana z siecią. Jeżeli częstotliwość napięcia
prądnicy jest większa niż na szynach głównych, lampki synchronizacyjne wirują zgodnie z
ruchem wskazówek zegara. Częstotliwość wirowania lampek zależy od różnicy częstotliwości
napięć. Jeżeli napięcie na zaciskach prądnicy z jakieś przyczyny jest niższe od napięcia na
szynach, koniecznie trzeba dostosować prąd wzbudzenia prądnicy. Po uruchomieniu prądnicy
jej częstotliwość napięcia jest niższa niż na szynach. Należy zwiększyć jej prędkość poprzez
zwiększenie dawki paliwa, co można wykonać przyciskiem „Up” (zwiększ) na rozdzielnicy
głównej w polu prądnic. Po zwiększeniu obrotów prądnicy częstotliwość napięcia na jej
zaciskach powinna być nieco większa niż na szynach głównych. Załączenie prądnicy na szyny
powinno być przeprowadzone, gdy dioda świecąca synchronoskopu znajduje się na pozycjach
od 5 do 12, a częstotliwość napięcia prądnicy jest nieznacznie większa od występującej na
szynach głównych. Jest to podyktowane tym, że podczas załączania prądnicy na szyny,
powinna ona przejąć obciążenie.
napięcie
częstotliwość
400V 480V
46Hz 64Hz
G
3~
4
2
3
1

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Sekwencja
działania
układu
synchronizatora
automatycznego
rozpoczyna
się
od zainicjowania nadzoru czasowego (kontroli czasu trwania) procedury synchronizacji, który
zwykle dopuszcza maksymalny czas procesu równy 10 s. Następnie synchronizator sprawdza,
czy odchyłka wartości napięcia synchronizowanej prądnicy od napięcia sieci nie przekracza
10%, a następnie kontrolowana jest różnica częstotliwości prądnicy i sieci. Proces kończy się
wyłączeniem procedury nadzoru czasowego.
Regulacja częstotliwości i rozdział mocy czynnej
Regulacja prędkości obrotowej silnika napędowego wiąże się ze zmianą częstotliwości
pracy prądnicy. W rozwiązaniach elektrowni okrętowej istotnym problemem przy pracy
równoległej zespołów prądotwórczych jest równoczesna regulacja częstotliwości (stabilizacja
częstotliwości w sieci) i rozdział mocy czynnych między poszczególne pracujące zespoły
prądotwórcze.
Układ automatycznego rozdziału mocy czynnej realizuje funkcje ciągłej kontroli i regulacji
rozdziału mocy czynnej pomiędzy równolegle pracujące zespoły prądotwórcze, z zachowaniem
stałej częstotliwości napięcia w sieci.
Rozdział mocy czynnej
Zgodnie z przepisami towarzystw klasyfikacyjnych podstawowym wymaganiem
pracujących symetrycznie zespołów prądotwórczych jest proporcjonalne obciążanie
z dokładnością do 15% mocy znamionowej. Umożliwia to układ regulacji podziału obciążenia
na poszczególne zespoły. W celu zwiększenia obciążenia danej prądnicy należy starać się
zwiększyć jej prędkość obrotową (np. poprzez zwiększenie dawki paliwa w silniku
napędowym tego generatora). Za utrzymanie stałego proporcjonalnego obciążenia zespołów
prądotwórczych odpowiada odpowiedni sterownik PLC. Tylko w stanach awaryjnych
prowadzi się sterowanie ręcznie.
Układy rozdziału mocy czynnej i częstotliwości
W rozdziale mocy czynnych i regulacji częstotliwości w okrętowych systemach
elektroenergetycznych najpowszechniej wykorzystywane są dwie metody: z regulacją
połączoną mocy i częstotliwości oraz z zespołem wiodącym. Metoda z regulacją połączoną
mocy i częstotliwości stosowana jest w systemach z większą liczbą zespołów
współpracujących.
W układzie sterowania rozdziałem mocy czynnych i regulacji częstotliwości występuje
współpraca dwóch regulatorów: nadrzędnego regulatora krokowego częstotliwości lub
rozdziału mocy czynnych oraz regulatora prędkości obrotowej ZP. Konstrukcja nadrzędnego
regulatora krokowego oparta na członie trójpołożeniowym z histerezą oraz inercyjnym
sprzężeniem zwrotnym. Strukturę nadrzędnego regulatora krokowego współpracującego
z regulatorem prędkości obrotowej przedstawia rysunek 20.
W większości przypadków w zespołach prądotwórczych stosowane są regulatory
prędkości obrotowej typu hydraulicznego.
W rozwiązaniach elektrowni okrętowej, szczególnie o mniejszej liczbie zespołów,
stosowana jest struktura układu rozdziału mocy z zespołem wiodącym. W odróżnieniu od
metody z równoczesną regulacją mocy i częstotliwości zespół prądotwórczy aktualnie
pracujący będzie miał charakter zespołu odniesienia – wiodący. Pozostałe zespoły dopasowują
się do parametrów pracy zespołu wiodącego. Regulator prędkości obrotowej zespołu
wiodącego, ze względu na konieczność stabilizacji częstotliwości niezależnie od obciążenia,
powinien mieć charakterystykę sztywną, pozostałe zespoły charakterystyki elastyczne. Metodę
regulacji częstotliwości i rozdziału mocy czynnej na równolegle pracujące prądnice można
stosować do dowolnej liczby prądnic, przy czym, jeśli moc jednej prądnicy wiodącej jest
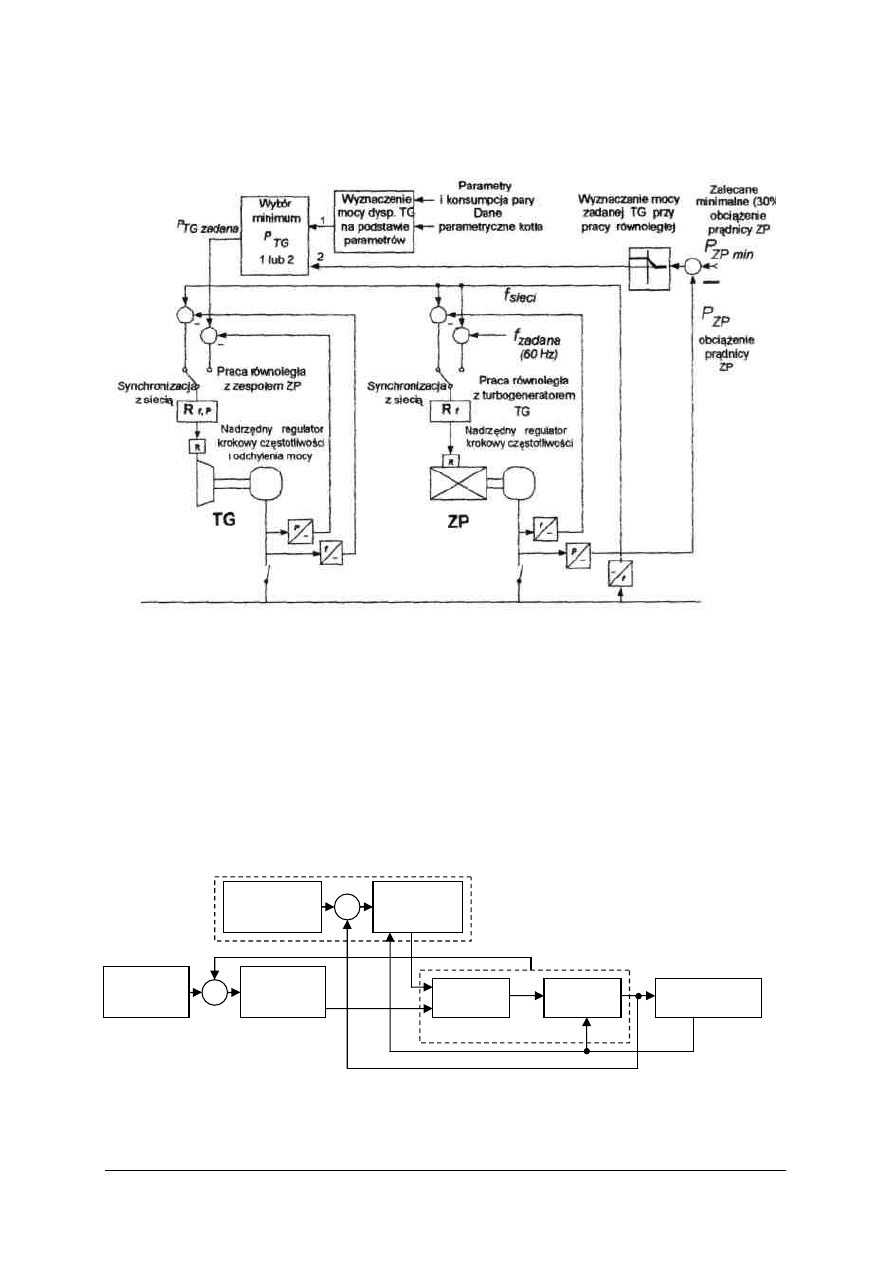
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
niewystarczająca, jako wiodące mogą być wyznaczone dwie prądnice. Wówczas rozdział
obciążeń pomiędzy prądnicami wiodącymi odbywać się będzie na zasadzie wykorzystania
charakterystyk pseudostatycznych – rozdziału obciążenia proporcjonalnego.
Rys. 21. Struktura układu sterowania pracą turbogeneratora z zespołem prądotwórczym podczas
synchronizacji i rozdziału mocy czynnej [9]
Regulacja napięcia
Regulacja napięcia będzie realizowana na podstawie schematu blokowego układu regulacji
stałowartościowej napięcia prądnicy. Schemat ten odnosi się do części elektrycznej zespołu
prądotwórczego i został przedstawiony na rysunku 21. Regulator napięcia prądnicy
synchronicznej najczęściej ma nastawianą stałą wartość zadaną napięcia i jest przeznaczony do
jak najszybszego skorygowania wartości napięcia do żądanego poziomu oraz do uzyskania
minimalnego uchybu napięcia, tj. różnicy pomiędzy wartością zadaną a wartością mierzoną
napięcia prądnicy. Na wspomnianym schemacie pokazano sytuację, w której zadajnikiem
napięcia ustala się wartość napięcia które jest porównywane z napięciem prądnicy.
Rys. 22. Układ regulacji napięcia prądnicy – część elektryczna
silnik
spalinowy
wirujące
masy
zadajnik
napięcia U
z
regulator
napięcia
wirnik
stojan
prądnica
obciążenie
U
I, cosφ
ε
n
I
w
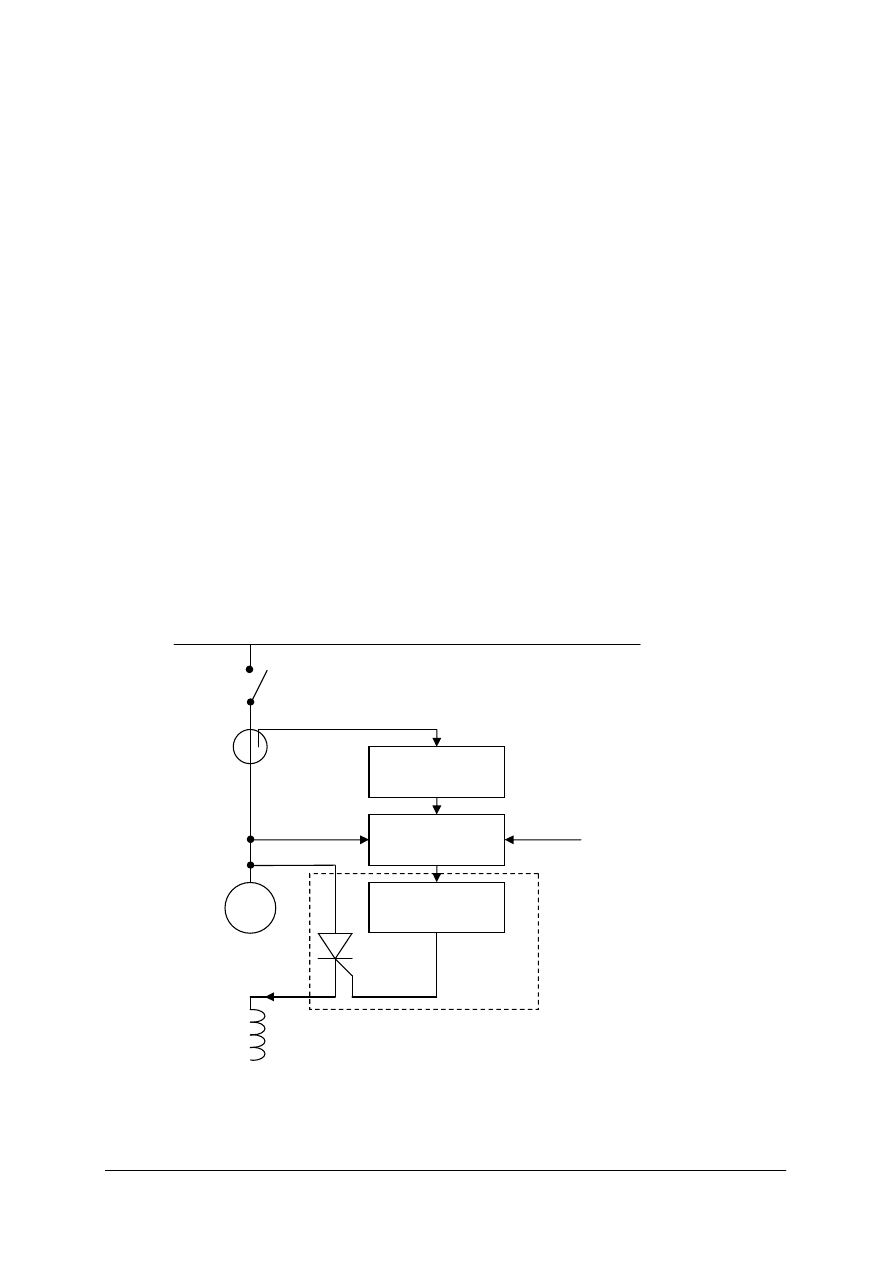
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Sygnał uchybu napięcia podany jest do regulatora napięcia i odpowiednio korygowany
w zależności od obciążenia prądnicy, gdzie uwzględnia się prąd obciążenia oraz charakter
obciążenia określony przez cos. Zmiana obciążenia (zmiana wielkości pobieranego prądu)
powoduje zmianę wartości napięcia.
To niekorzystne zjawisko zmiany napięcia od chwilowych warunków obciążenia
korygowane jest przez regulator napięcia. Regulator, zmieniając wartość prądu wzbudzenia
zgodnie z charakterystykami regulacyjnymi, dąży do stabilizacji poziomu napięcia zadanego. A
zatem zadaniem regulatora napięcia i układu wzbudzenia jest stabilizacja napięcia którego
wahania są wywołane przede wszystkim obciążeniem prądnicy.
Do regulacji napięcia prądnicy powszechnie stosowany jest układ fazowej kompensacji
wzbudzenia (szeregowo-bocznikowy). Energia niezbędna do wzbudzania pobierana jest
z zacisków twornika, stąd prądnica jest samowzbudną. W szeregowo-bocznikowych układach
wzbudzenia stabilizacja napięcia polega na generowaniu prądu wzbudzenia poprzez nałożenie
dwóch sprzężeń: napięciowego i prądowego z obwodem twornika. Składowa napięciowa
prądu wzbudzenia jest proporcjonalna do napięcia twornika. Powoduje ona wytworzenie się
podstawowego strumienia wzbudzenia, odpowiedzialnego za zaindukowanie znamionowej siły
elektromotorycznej przy biegu jałowym. Natomiast składowa prądowa, proporcjonalna do
obciążenia prądnicy, jest źródłem strumienia dodatkowego, kompensującego główne skutki
oddziaływania twornika. W układzie regulacji napięcia sygnałem pomiarowym jest sumowana
geometrycznie składowa napięcia i prądu z uwzględnieniem kąta przesunięcia fazowego. Na tej
podstawie regulator zmienia wartość prądu wzbudzenia, która jest uzależniona od wartości i
charakteru obciążenia. Regulator napięcia prądnicy synchronicznej z układem fazowej
kompensacji wzbudzenia zbudowany jest z układu kompensacji prądowej, członu pomiarowo-
porównującego i wzmacniacza zadającego wartość prądu wzbudzenia I
w
(rys. 23).
Rys. 23. Schemat regulatora napięcia z kompensacją prądową [9]
układ kompensacji
prądowej
człon pomiarowo –
porównujący
wzmacniacz
wstępny
G
3~
wartość zadana napięcia
przetwornik
tyrystorowy
prąd wzbudzenia
Iw

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
Źródłem prądu wzbudzenia jest trójfazowa odwrócona prądnica synchroniczna (wirujący
twornik) zasilająca uzwojenie wzbudzenia prądnicy poprzez wirujący prostownik diodowy M3.
Regulacja napięcia na zaciskach prądnicy odbywa się za pomocą tyrystora Ml, sterowanego z
regulatora napięcia układu kompensacji fazowej. Regulator napięcia mierzy wartość napięcia
na zaciskach prądnicy i – posługując się komparatorem – porównuje ją z wartością zadaną. W
razie wahań wartości napięcia następuje takie wysterowanie tyrystora które spowoduje
utrzymanie stałej wartości napięcia na zaciskach prądnicy. W rezultacie wzrost napięcia
powyżej pewnej wartości skutkuje rozpoczęciem przewodzenia przez tyrystor, który tym
samym przyczynia się do obniżenia prądu wzbudzenia a więc także napięcia. Natomiast gdy
tyrystor jest zablokowany, następuje wzrost napięcia prądnicy.
Napięcie wzbudzenia, niezależnie od tego czy to w prądnicy bezszczotkowej czy
z pierścieniowej ma składową zależną od napięcia maszyny i składową zależną od prądu
obciążenia (głównie biernego). W czasie zwarcia, gdy znika składowa napięciowa, wzbudzenie
dąży się do ciągłości zasilania regulatora. Układ ten łącznie z wirującą wzbudnicą
wypracowuje po wyprostowaniu napięcie prądu stałego większe niż to jest potrzebne maszynie
w danym stanie pracy. Jednoczenie regulator napięcia ma zadanie kształtowania
charakterystyki zewnętrznej prądnicy, w szczególności uzależnienie napięcia maszyny
od składowej biernej obciążenia. To uzależnienie w praktyce zwykle realizuje się za pomocą
tzw. kompensacją członu pomiarowego regulatora. Ponieważ napięcie wzbudzenia jest
większe niż wymaga to normalna praca, zadaniem regulatora jest działanie polega
na zmniejszaniu tego napięcia. W efekcie większość układów wzbudzenia ma dwa układy jeden
dla uzyskania napięcia wzbudzenia w zależności od obciążenia (układ kompaundacji fazowej) i
drugi w regulatorze dla kształtowania statyzmu charakterystyki zewnętrznej (układ
kompensacji członu pomiarowego).
Elektrownie zautomatyzowane
Współczesny rozwój technologiczny powoduje ciągłą zmianę stosowanych systemów
i rozwiązań sterujących pracą elektrowni okrętowej. Obecnie w większości rozwiązań
systemów elektroenergetycznych mają zastosowanie zdecentralizowane komputerowe systemy
kontroli i sterowania o strukturze hierarchicznej, które zapewniają pełną automatykę
elektrowni bez stałego nadzoru, w siłowni bezwachtowej. W zautomatyzowanych systemach
elektroenergetycznych do realizacji poszczególnych zadań i funkcji stosuje się specjalizowane
mikroprocesorowe układy kontroli, zabezpieczenia i sterowania automatycznego –
specjalizowane sterowniki programowalne.
W zależności od stopnia automatyzacji układów elektrowni można wyróżnić następujące
rozwiązania:
−
z zanikiem napięcia (typu blackout),
−
z samoczynnym zespołem awaryjnym,
−
z układami pełnej automatyki, zapewniającymi ciągłość zasilania.
Elektrownie z samodzielnie pracującymi zespołami prądotwórczymi, z zanikiem napięcia
typu blackout
Elektrownie z samodzielnie pracującymi zespołami prądotwórczymi z zanikiem napięcia
typu blackout (rys. 24) są stosowane na statkach o nierozbudowanych systemach
elektroenergetycznych i o mniejszych mocach, gdzie zapotrzebowanie na energię elektryczną
pokrywane jest normalnie pracą jednego zespołu prądotwórczego. Ze względu na prostotę
realizacji są to rozwiązania tanie. Praca układu przedstawia się w następujący sposób: przy
założeniu, że w danym momencie pracuje jeden z zespołów, napięcie z załączonej prądnicy
podawane jest do głównej tablicy rozdzielczej GTR i zasila wszystkie odbiorniki Q. W wyniku
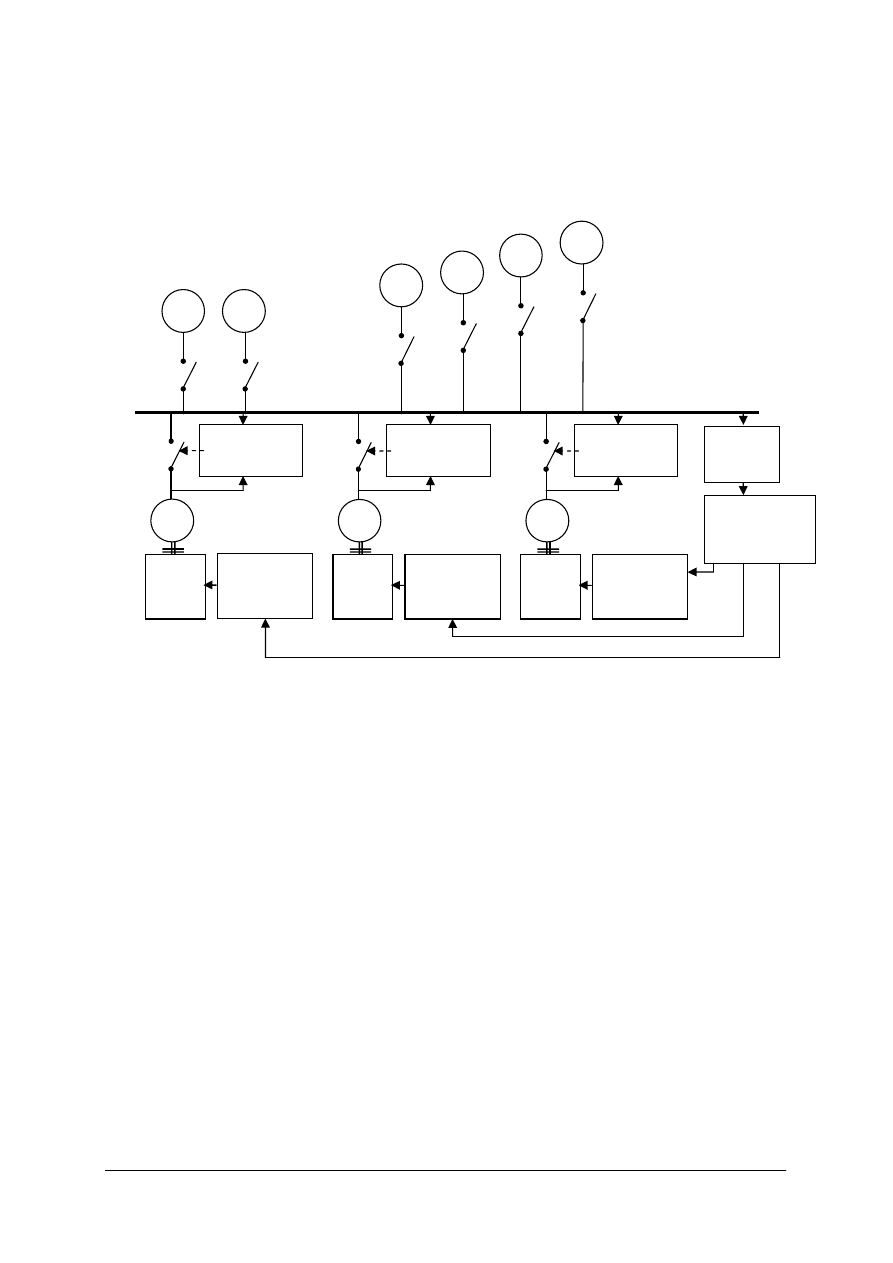
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
zakłóceń, np. zwarcia, gwałtownego przeciążenia albo awarii silnika napędowego prądnicy,
następuje wyłączenie z sieci aktualnie pracującego zespołu prądotwórczego. Zanik napięcia na
szynach spowoduje wyłączenie wszystkich odbiorników z sieci, a czujnik pomiaru napięcia i
częstotliwości wyzwoli impuls do uruchomienia i załączenia kolejnego zespołu
prądotwórczego (zespołu rezerwowego).
Rys. 24. Elektrownia z samodzielnie pracującymi zespołami prądotwórczymi
z zanikiem napięcia typu blackout [9]
Kolejność załączania zespołów jest przy tym ustalona. W czasie zaniku napięcia ciągłość
pracy czujników i układów automatyki zapewnia zasilanie awaryjne, zwykle z baterii
akumulatorów 24 V lub z systemów potrzymania napięcia UPS, które mogą pracować na
różnych poziomach napięcia. Przed pobudzeniem do startu zespół prądotwórczy musi być
w stanie „stand–by”, to znaczy wstępnie przesmarowany oraz wstępnie podgrzewany.
Po rozruchu zespołu i dojściu do prędkości znamionowej, następuje wzbudzenie prądnicy
i zaczyna działać układ regulacji napięcia.
W momencie gdy na zaciskach prądnicy pojawi się napięcie generatora U
G
> 0,85 U
Gn
,
gdzie U
Gn
to napięcie znamionowe generatora, a napięcie w sieci U
n
= 0, nastąpi załączenie
wyłącznika (np. dla zespołu 1 zostanie załączony wyłącznik S
1
). W tym samym czasie na
szynach pojawi się napięcie. Następnie zostaną załączone w pierwszej kolejności sekwencyjnie
odbiorniki: urządzenia pomocnicze zespołów prądotwórczych, pompa p. poż., sprężarka
powietrza, urządzenia sterowe, urządzenia nawigacyjne, urządzenia radiowe, oświetlenie
niektórych punktów, prostowniki baterii akumulatorów. Zgodnie z przepisami towarzystw
klasyfikacyjnych odbiorniki ważne dla bezpieczeństwa statku, urządzenia związane z
uruchomieniem silnika głównego (pompy chłodzące SG wody słodkiej, morskiej, olejowe,
sprężarki itp.) ze względu na prąd rozruchowy silników elektrycznych (6×I
zn
) będą załączane
w odpowiedniej sekwencji czasowej t = 0, 2, 4, 6 s. Załączenie do pracy części odbiorników
mniej ważnych będzie wymagało ręcznego uruchomienia przez personel obsługujący. W
wypadku nieudanego startu zespołu, komenda „rozruch” przechodzi na następny zespół.
O
1
O
2
O
1
O
2
GTR
odbiorniki ważne
odbiorniki
U
n
= 0
f
n
= 0
U = 0
U
G
>0,85•U
Gn
G
1
M
automatyka
silnika
spalinoweg
O
1
O
2
Kolejność
załączania
0s 2s 4s 6s
Sekwencyjne
załączania po
blackoucie
U = 0
U
G
>0,85•U
Gn
G
1
M
automatyka
silnika
spalinoweg
U = 0
U
G
>0,85•U
Gn
G
1
M
automatyka
silnika
spalinoweg
Układ
zabezpieczający
z nastawnikiem
kolejności
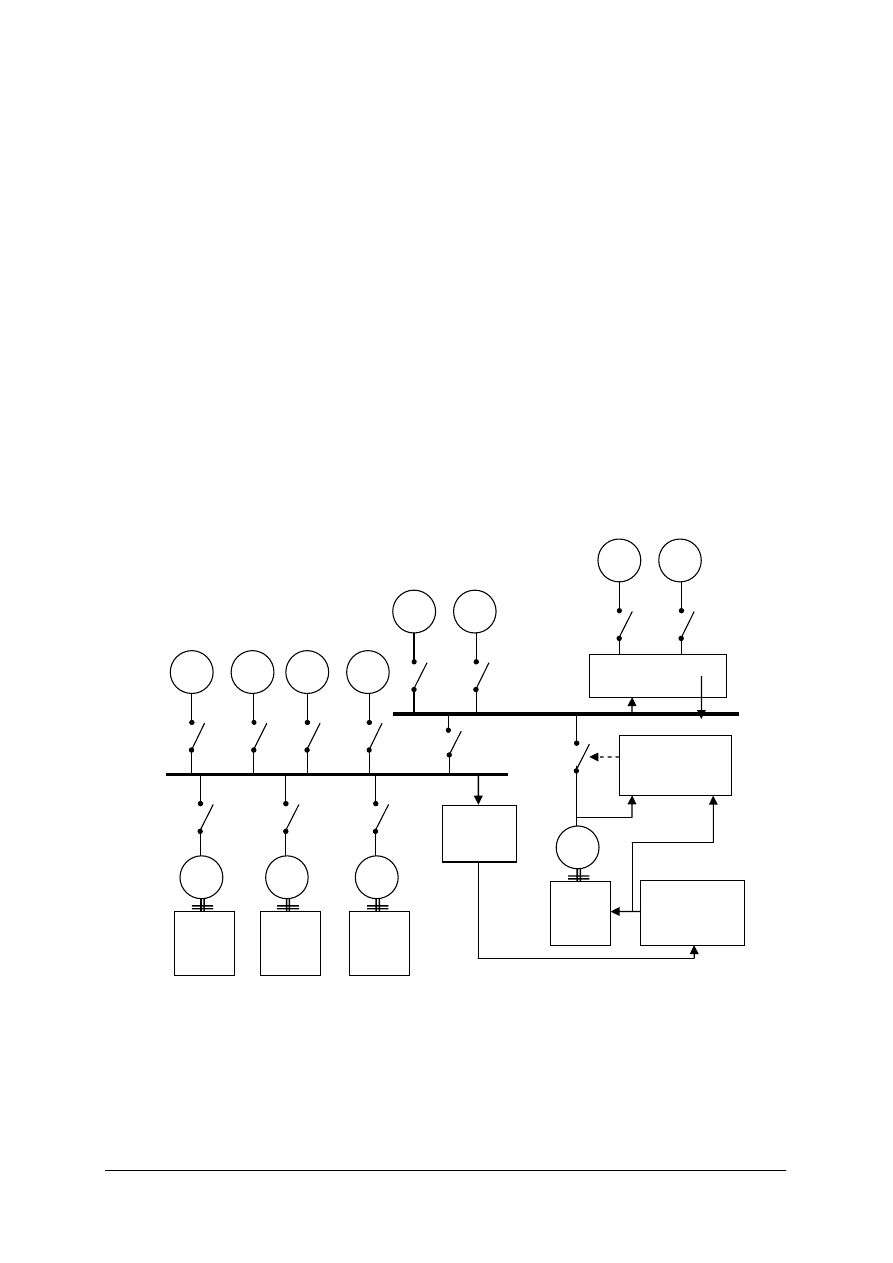
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
Zwykle pracuje tylko jeden z zespołów prądotwórczych pokrywający zapotrzebowanie na
moc potrzebną do ruchu statku. W razie konieczności zapewnienia zasilania większej liczby
odbiorników (np. urządzeń dźwigowych, steru strumieniowego) możliwa jest praca równoległa
zespołów.
Zazwyczaj układ automatyki elektrowni jest wyposażony w synchronizatory
półautomatyczne, gdzie pierwszy impuls – rozpoczynający proces synchronizacji – musi być
zadany przez obsługę, a sam proces synchronizacyjny odbywa się automatycznie. W układach
tych samoczynnie powinien następować rozkład mocy czynnej. Rozkład mocy symetryczny jest
stosowany dla zespołów tego samego typu, zaś asymetryczny – przy współpracy prądnic
wałowych z równolegle pracującymi prądnicami napędzanymi silnikami Diesla. Elektrownie
z samodzielnie pracującymi zespołami prądotwórczymi z zanikiem napięcia nie posiadają
zespołu awaryjnego a także nie jest w nich analizowany stopień obciążenia zespołów.
Po zaniku napięcia elektrownie tego typu powinny odbudować napięcie w czasie nie dłuższym
niż 45 s.
Elektrownia z samoczynnym zespołem awaryjnym
Elektrownia z samoczynnym zespołem awaryjnym (rys. 25) zasadniczo różni się
wyposażeniem w dodatkową rozdzielnicę awaryjną ATR (awaryjna tablica rozdzielcza)
i zespół awaryjny.
Rys. 25. Elektrownia z samoczynnym zespołem awaryjnym [9]
Rozdzielnica i zespół awaryjny umieszczane są powyżej najwyższego pokładu ciągłego
poza obrębem szybów maszynowych. Moc zespołu awaryjnego powinna zapewnić zasilanie
wszystkich odbiorników, których jednoczesna praca jest wymagana dla zapewnienia
bezpieczeństwa w czasie awarii, a jej rząd zwykle kształtuje się na poziomie 70÷100 kW.
W razie zaniku napięcia na GTR podany jest impuls do uruchomienia zespołu awaryjnego.
Jednocześnie zostaje otwarty wyłącznik S
4
. Przeważnie rozruch agregatu awaryjnego realizuje
O
1
O
2
O
3
O
4
Autotransformator
440/220V
U = 0
U
G
>0,85×U
n
O
5
O
6
O
7
O
8
ATR
GTR
odbiorniki 440V
odbiorniki 220V
odbiorniki
G
4
M
zespół
awaryjny
G
1
M
G
2
M
G
3
M
automatyka
silnika
spalinowego
S4
U
n
= 0
f
n
= 0

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
się na drodze elektrycznej ze specjalnych baterii akumulatorów rozruchowych, ale również
stosowany jest rozruch pneumatyczny i hydrauliczny. Po rozruchu zespołu prądotwórczego
awaryjnego, po 10÷15 s, pojawia się napięcie na stykach wyłącznika S
5
i po spełnieniu
warunku U > 0,85×U
G
„ następuje załączenie wyłącznika S
5
. Agregat awaryjny zasila
rozdzielnicę awaryjną. Wyłączniki S
5
i S
4
nie mogą być załączone jednocześnie i są wzajemnie
blokowane. Łączny czas rozruchu i przejęcia obciążenia po blackoucie przez prądnicę
awaryjną nie może przekroczyć 45 s. Z awaryjnej tablicy rozdzielczej, podzielonej na dwie
sekcje: 220 V i 440 V, zasilane są urządzenia niezbędne do zachowania bezpieczeństwa osób i
własności manewrowych statku.
Sekcja 220 V zasilana jest poprzez transformator. Z sekcji tej zasilane są: oświetlenie
awaryjne, światła sygnałowo-pozycyjne, środki łączności wewnętrznej, wyposażenie radiowe i
nawigacyjne, instalacje wykrywacze pożaru, środki sygnalizacji, a z 440 V – awaryjna pompa
pożarową urządzenia elektryczne wytwornicy piany i urządzenie sterowe (również sprężarka
awaryjna). Następnie zostaje uruchomiony zespół prądotwórczy podstawowy. Zwykle zespoły
są wyposażone w synchronizatory półautomatyczne, tzn., że sygnał rozpoczęcia synchronizacji
zainicjuje operator, a synchronizacja i załączenie na szyny będzie przebiegało automatycznie.
Po załączeniu prądnicy pojawia się napięcie na szynach głównych i następuje samoczynne
odłączenie S5 i ze zwłoką załączanie S4 oraz przejęcie obciążenia z ATR. Zwłoka czasowa
między odłączeniem S5 i załączeniem S4 wynosi około 2 s. W trakcie przejmowania
obciążenia z tablicy awaryjnej występuje na niej chwilowy zanik napięcia (ok. 2 s.). A zatem
pomija się proces synchronizacji zespołu awaryjnego z zespołem podstawowym. Następnie
zespół awaryjny zostaje zdalnie wyłączony za pomocą przycisku STOP z GTR lub ze
stanowiska lokalnego sterowania (przy agregacie awaryjnym). Stany pracy i zatrzymanie
agregatu są sygnalizowane na GTR.
Elektrownie z układami pełnej automatyki
Elektrownie z układami pełnej automatyki mają za zadanie zapewnienie ciągłości zasilania
odbiorników we wszystkich stanach eksploatacji statku. Pod pojęciem elektrowni z układu
sterowania z pełną automatyką będziemy rozumieli system pracujący bez nadzoru operatora.
Są one wyposażone w automatyczne układy sterowania oraz kontroli pracy prądnic, napędów,
turbiny parowej (jeśli jest stosowana jako napęd) oraz prądnicy wałowej. Elektrownia
z układami pełnej automatyki realizuje rozszerzone funkcje elektrowni z samodzielnie
pracującymi zespołami prądotwórczymi z zanikiem napięcia typu blackout.
Układy automatyki posiadają bloki kontroli parametrów generatora i silnika napędowego,
w razie ich przekroczenia zostaje wygenerowany sygnał alarmowy lub wyłączający awaryjnie
zespół. Dodatkowo odbywa się ciągła analiza stopnia obciążenia zespołów prądotwórczych po
osiągnięciu określonych poziomów obciążenia – zespół dodatkowy zostaje załączony lub
zbędny zespół zostaje wyłączony.
W układach pełnej automatyki elektrowni, w wypadku wystąpienia zakłócenia pracy
systemu (np. zbyt dużego obciążenia spadku wartości napięcia i częstotliwości w sieci poniżej
wartości dopuszczalnych), układ generuje rozkaz uruchomienia dodatkowego zespołu
prądotwórczego. Rozkaz będzie przekazany do układu kolejności załączania zespołów, który
spowoduje uruchomienie zespołu będącego w rezerwie i jest tak długo generowany, aż jeden
z zespołów rezerwowych rozpocznie pracę. Tym samym nie ma przerwy w zasilaniu na
szynach głównych. Załączanie dodatkowego zespołu prądotwórczego może być realizowane w
celu odciążenia pracujących zespołów, odciążenia uszkodzonego zespołu i zatrzymania
z opóźnieniem, odciążenia uszkodzonego zespołu i zatrzymania natychmiastowego.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie funkcje realizują układy automatyki w okrętowym systemie okrętowym?
2. W jakich konfiguracyjach buduje się okrętowej elektrownie?
3. Jakie są warunki synchronizacji prądnic okrętowych?
4. Jakie są systemy synchronizacji prądnic?
5. Gdzie
znajdują
się
punkty
ręcznego
sterowania
okrętowym
systemem
elektroenergetycznym?
4.4.3. Ćwiczenia
Ćwiczenie 1
Wykonaj synchronizacje prądnicy synchronicznej z siecią elektroenergetyczną przy
pomocy kolumny synchronizującej?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zbudować układ sterowania silnika napędzającego prądnicę,
2) podłączyć generator do kolumny synchronizującej i wyłącznika,
3) uruchomić silnik napędzający prądnicę synchroniczną,
4) zasilić uzwojenie wzbudzające,
5) doprowadzić by częstotliwość sieci była zbliżona do częstotliwości napięcia prądnicy,
6) doprowadzić do zrównania napięć prądnicy i sieci,
7) załączyć prądnicę do sieci.
Wyposażenie stanowiska pracy:
−
prądnica synchroniczna połączona z silnikiem prądu stałego,
−
kolumna synchronizująca,
−
wyłącznik,
−
przewody łączeniowe.
Ćwiczenie 2
W symulatorze okrętowej elektrowni, wykonaj podstawowe pomiary parametrów
wyjściowych energii elektrycznej. Ustal minimalne i maksymalne wartości napięcia
i częstotliwości.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z instrukcją obsługi trenażera,
2) określić kontrolowane parametry (maksymalne, średnie),
3) odczytać z pamięci rejestratora wartości napięcia – wyszukać wartość minimalną
i maksymalną,
4) odczytać wartości częstotliwości – wyszukać wartość minimalna i maksymalną.
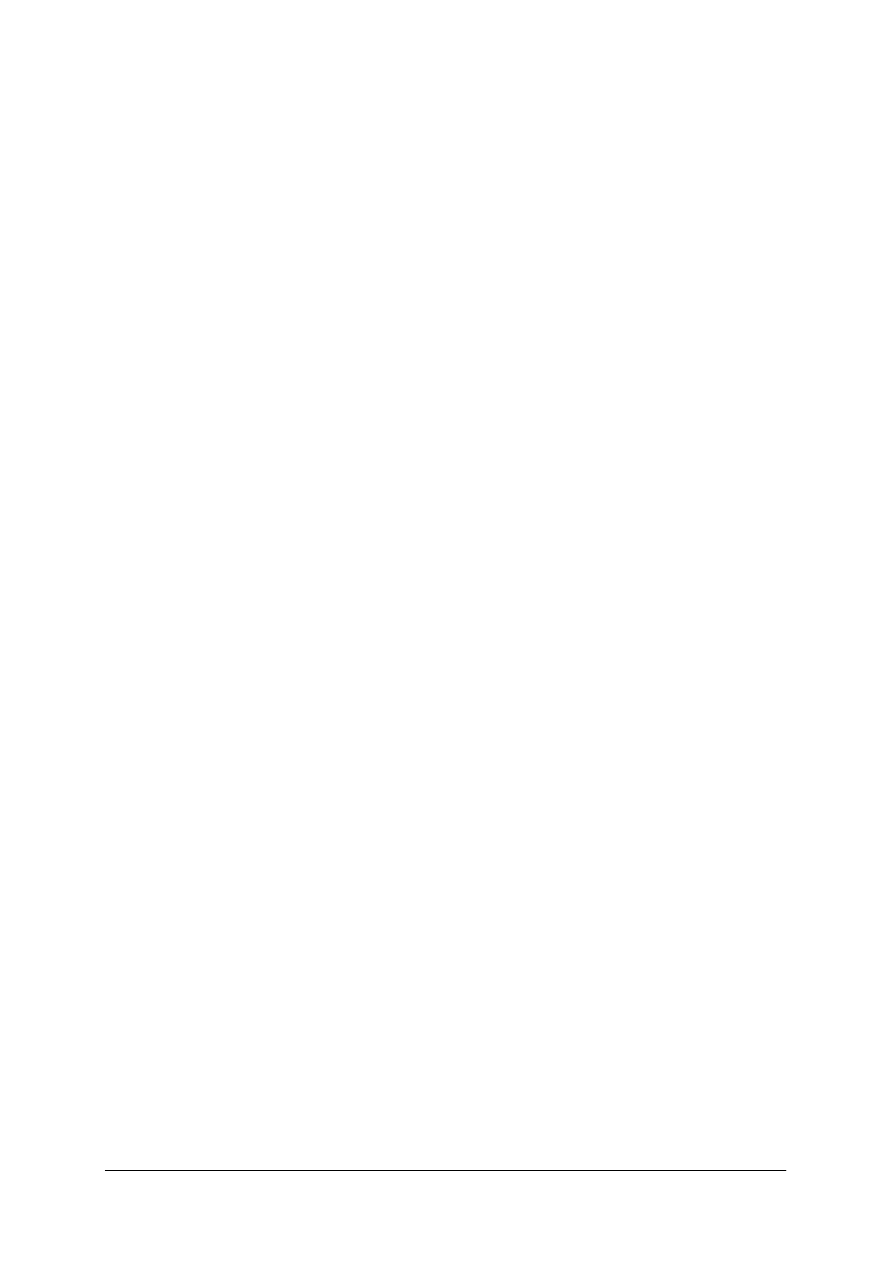
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
Wyposażenie stanowiska pracy:
−
symulator okrętowej elektrowni pokładowej,
−
dokumentacja techniczna symulatora,
−
przybory do pisania.
Ćwiczenie 3
Analizując schemat okrętowego systemu elektroenergetycznego wskaż regulatory, które
sterują pracą elementów systemu elektroenergetycznego – określ funkcje jakie każdy z nich
realizuje.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się ze schematem okrętowego systemu elektroenergetycznego,
2) wyszukać regulatory sterujące urządzeniami systemu elektroenergetycznego,
3) na podstawie zasady działania i istniejących połączeń, określ funkcje jakie realizuje każdy
z regulatorów,
4) opisz zadania regulatorów.
Wyposażenie stanowiska pracy:
−
schemat ideowy okrętowego systemu elektroenergetycznego,
−
przybory do pisania.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) omówić zasadę działania układów automatycznej synchronizacji?
2) opisać metody równoważenia obciążenia okrętowych zespołów
prądotwórczych?
3) wskazać zadania jakie realizują sterowniki w okrętowym systemie
elektroenergetycznym?
4) określić urządzenia, które rejestrują parametry energii elektrycznej?
5) określić w jaki sposób zwiększa się niezawodność okrętowych
systemów elektroenergetycznych?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań i sprawdza Twoje wiadomości z zakresu podstawowych układów
automatyki.
5. Tylko jedna odpowiedź do każdego zadania jest prawidłowa.
6. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi. Skreśl prawidłową
odpowiedź.
7. Jeżeli się pomylisz, błędną odpowiedź weź w kółko i skreśl odpowiedź prawidłową. Jeżeli
skreślisz więcej niż jedną odpowiedź do jednego zadania, nie zostanie one ocenione.
8. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
9. Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, odłóż jego rozwiązanie
na później; wrócisz do niego, gdy zostanie Ci wolny czas.
10. Na rozwiązanie testu masz 45 minut.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1. Do ustalania optymalnych nastaw regulatorów służy kryterium
a) Ohma.
b) Lenza.
c) Nequista.
d) Kirchoffa.
2. Układ regulacji w której regulator ma za zadania utrzymać stałą w czasie wartość
wyjściową nazywamy
a) układ śledzący.
b) układ stabilizacji.
c) układ programowalny.
d) układ optymalny.
3. Układ standaryzujący jest to układ, który
a) przetwarza wartość zadaną na sygnał sterujący.
b) przetwarza wielkości nieelektryczne na elektryczne.
c) przetwarza wielkości elektryczne na nieelektryczne.
d) skaluje przesyłane sygnały do wartości znormalizowanych.
4. Prądnica tachometryczna służy do
a) wytwarzania energii elektrycznej w okrętowym systemie elektroenergetycznym.
b) wytwarzania energii elektrycznej w stanach awaryjnych do podtrzymania pracy
urządzeń decydujących o bezpieczeństwie jednostki.
c) pomiaru prędkości obrotowej.
d) zabezpieczania prądnic przed przeciązeniami.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
5. Do pomiaru temperatury nie stosuje się
a) czujników kubełkowych.
b) termistorów.
c) termoelementów.
d) czujników manometryczne.
6. Regulatory kaskadowe stosuje się w celu
a) zmniejszenia wielkości sygnałów zakłócających.
b) skrócenia czasu regulacji.
c) stabilizacji sygnału zadanego.
d) utrzymania na stałym poziomie sygnału zadanego.
7. Sygnał wyjściowy regulatora dwupołożeniowego
a) zmienia się w sposób płynny.
b) zmienia się w sposób ciągły.
c) utrzymuje się na stałym poziomie.
d) zmienia się w sposób skokowy.
8. O udziale sygnału wyjściowego członu całkującego w całkowitym sygnale wyjściowym
regulatora PID decyduje
a) czas zdwojenia.
b) czas wyprzedzenia.
c) wzmocnienie.
d) zakres proporcjonalności.
9. Wskaż jak dzielą się regulatory ze względu na rodzaj sygnału wyjściowego
a) regulatory P, PI, PD i PID.
b) regulatory analogowe i cyfrowe.
c) regulatory dwustawne, tróstawne i wielostawne.
d) regulatory ciągłe, krokowe i impulsowe.
10. Błąd regulacji jest to różnica
6. wartości zadanej i sygnału sterującego.
7. sygnału sterującego i sygnału wyjściowego.
8. wartości zadanej i sygnału wyjściowego.
9. wartości zadanej i sygnału zakłócającego.
11. W celu utrzymania temperatury w określonym przedziale, należy zastosować regulator
a) dwustanowy.
b) trójstanowy.
c) wielostanowy.
d) obiekt.
12. Skrót CMK oznacza
a) wyodrębnione stanowisko do kontroli i sterowania układów automatyki okrętowej.
b) centralny kolektor zasilający silniki główne w paliwo.
c) centralny magistrala kolektorowa – do wyprowadzania spalin z silników
wysokoprężnych.
d) centralny sterownik siłownią okrętową.
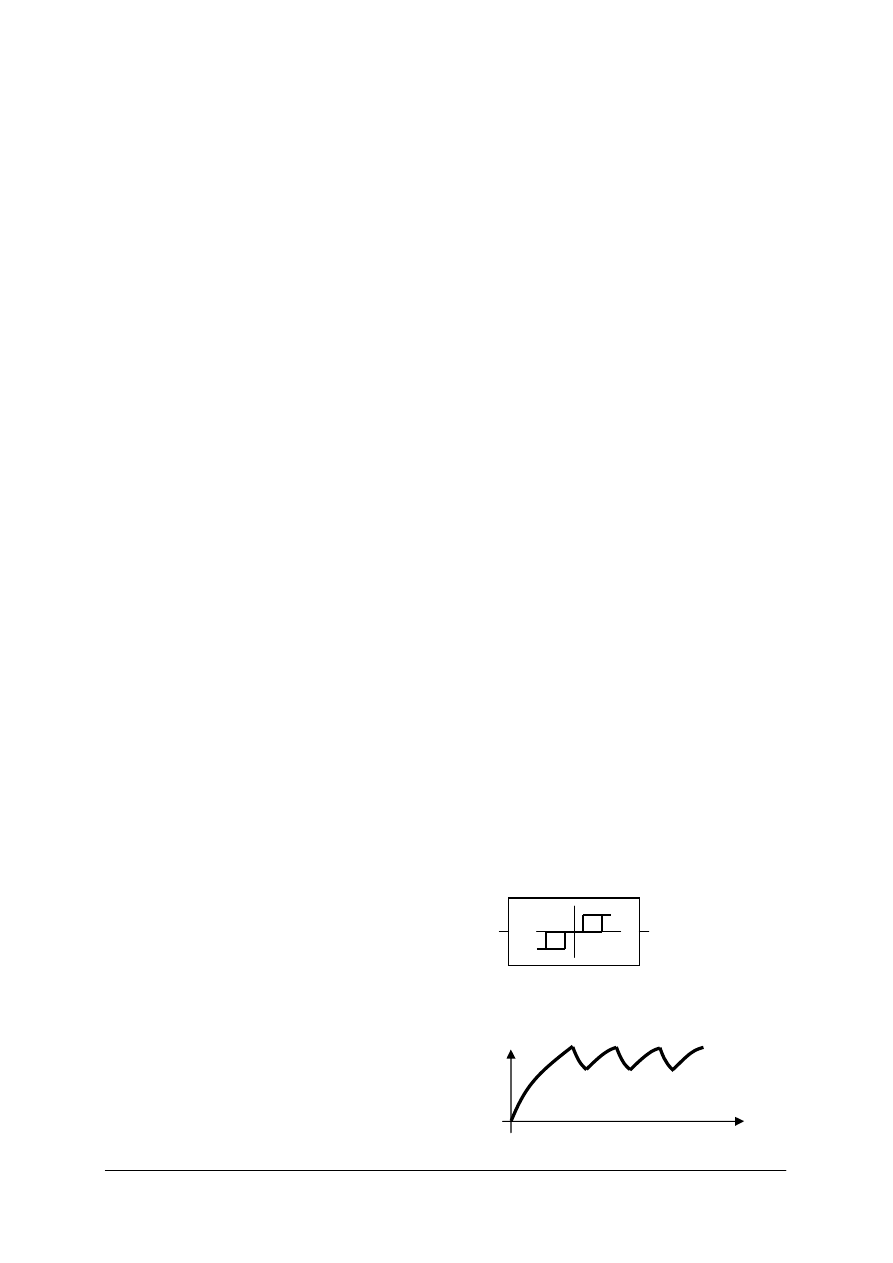
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
13. Automatyka okrętowa składa się z systemów
a) napędowego i przeładunkowego.
b) stabilizacji kołysań statku i regulacji temperatury.
c) prowadzenia statku oraz elektroenergetycznego.
d) nawigacji, energetycznego, ładunkowego oraz administracji i zarządzania.
14. Element na którym prezentuje się w formie graficznej poziomy wartości regulowanych to
a) sterownik PLC.
b) pulpit operatorski.
c) przetwornik standaryzujący.
d) przetwornik pomiarowy.
15. Przetwornik A/C realizuje
a) przetwarzanie wartości analogowych na cyfrowe.
b) przetwarzanie wartości cyfrowych na analogowe.
c) przetwarzanie wartości analogowych na binarne.
d) przetwarzanie wartości binarnych na analogowe.
16. W celu zwiększenia niezawodności systemów regulacji i sterowania
a) dubluje się przewody łączące elementy pomiarowe ze sterownikami.
b) dubluje się sterowniki PLC.
c) dubluje się urządzenia kluczowe.
d) dubluje się przetworniki pomiarowe.
17. System sprężonego powietrza w silniku głównym odpowiada za
a) chłodzenie silnika.
b) smarowanie silnika.
c) podgrzewanie silnika.
d) rozruch silnika.
18. Układ sterowania silnika głównego odpowiada za
a) regulacje prędkości obrotowej silnika głównego przy zmiennych obciążeniach.
b) kontrolę warunków pracy silnika.
c) sygnalizację przekroczenia dopuszczalnych warunków pracy silnika.
d) zatrzymania silnika w przypadku przekroczenia wartości dopuszczalnych.
19. Zaprezentowany symbol reprezentuje na schematach
a) element proporcjonalny.
b) element dwustanowy.
c) element trójstanowy.
d) element całkujący.
20. Wartość wyjściowa w obiekcie przybiera kształt taki jak zaprezentowano obok, określ jaki
regulator realizuje regulację
a) regulator dwustanowy.
b) regulator ciągły P.
c) regulator ciągły I.
d) regulator ciągły PI.
y
T
m
t
0
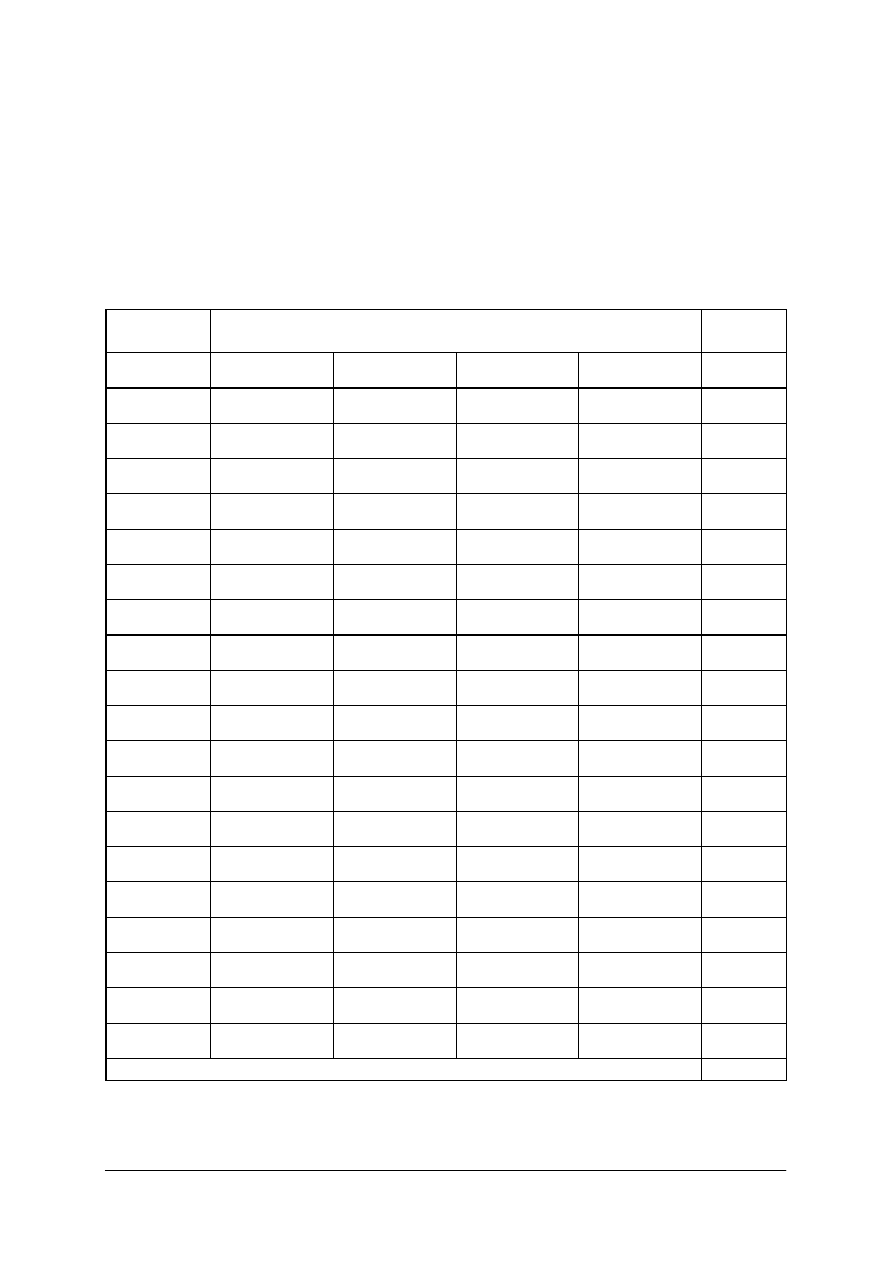
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
KARTA ODPOWIEDZI
Imię i nazwisko..........................................................................................
Użytkowanie układów automatyki okrętowej
Zakreśl poprawną odpowiedź
.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
6. LITERATURA
1. Barlik R., Nowak M.: Układy sterowania i regulacji urządzeń energoelektronicznych.
WSiP, Warszawa 1998
2. Bolkowski S.: Podstawy elektrotechniki. WSiP, Warszawa 1999
3. Bohdanowicz J. Kostecki M.: Podstawy automatyki dla oficerów statków morskich.
Wydawnictwo Morskie Gdańsk, Gdańsk 1980
4. Goźlińska E.: Maszyny elektryczne. WSiP, Warszawa 1998
5. Górski Z., Perepeczko A.: Okrętowe maszyny i urządzenia pomocnicze. TRADEMAR,
Gdynia 1997
6. Jabłoński W, Płoszajski G.: Elektrotechnika z automatyką. WSiP, Warszawa 2006
7. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 2006
8. Markiewicz A.: Zbiór zadań z elektrotechniki. WSiP, Warszawa 2006
9. Konwencja SOLAS Tekst ujednolicony. PRS 199 8
2. Piotrowski I., Witkowski K.: Okrętowe silniki spalinowe. TRADEMAR, Gdynia 1997
3. Płoszajski G.: Automatyka. WSiP, Warszawa 1995
4. Wyszkowski S.: Elektrotechnika okrętowa. Wydawnictwo Morskie Gdańsk, Gdańsk 1991
Wyszukiwarka
Podobne podstrony:
07 Badanie elementów i układów automatyki
EŚT 07 Użytkowanie środków transportu
Automatyka okrętowa – praca kontrolna 2
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
Zaliczenie z Automatyki Okretowej2
Automatyka okrętowa – praca kontrolna 1
37 Montowanie i testowanie połączeń układów automatyki
Wykład 6 Stabilność liniowych układów automatyki (2013)
Stabilność układów automatyki
07 Badanie układów dopasowania impedancji
01 Wprowadzenie do układów automatycznego sterowania
Pan Ziemniak, AM SZCZECIN, AUTOMATYKA, Automatyka - wykłady, Automatyka Okrętowa Kaszycki
2010 07 HAS House's Automated System
Automatyka okretowa001
Informatyka Wykład 07 B Teoria języków i automatów
więcej podobnych podstron