Programowanie robota
Roboty FANUC są robotami zorientowanymi na daną
czynność tzn., jeżeli chcemy, aby robot służył nam
do klejenia lub spawania, to dokonujemy zakupu
odpowiedniego
modelu
robota.
Różnice
w
poszczególnych typach robotów w zależności od
zastosowania wynikają głównie z osprzętu robota, a
także od strony sterowania, tzn. robot np. do klejenia
wyposażony jest w odpowiednie wejścia/wyjścia a
także instrukcje ułatwiające jego programowanie.
Roboty FANUC programuje się przy użyciu panela
operatorskiego zwanego teach pendantem. Panel
operatorski podpięty jest do szafy sterowniczej za
pomocą długiego elastycznego kabla.
Robota można programować dwiema metodami :
· poprzez nauczanie (teaching), tzn. najazd na punkt
programowany i zapamiętanie jego położenia,
· poprzez użycie języka programowania KARELL.
Metodę programowania poprzez nauczanie stosuje
się w celu zaprogramowania trajektorii robota,
wywoływania podprogramów, realizowanie prostych
operacji logicznych, operacje na wejściach/wyjściach
- załączanie lub wyłączanie, itp. Stosując metodę
programowania poprzez nauczanie jesteśmy w stanie
kompletnie zaprogramować robota, aby realizował
odpowiednie instrukcje, ale z mało skomplikowana
logiką.
W celu stworzenia nowego programu należy z menu
SELECT wybrać opcję CREATE, następnie podać nazwę
pliku, typ programu oraz opcjonalnie komentarz.
Istnieją cztery typy programów :
· JOB (JB), program główny (main program) - program
startujący, w którym można wywoływać podprogramy,
używać dowolnych instrukcji,
· PROCESS (PR), podprogram, który wywoływany jest z
programu głównego, stanowi część całego programu.
Podprogram może być wywoływany dowolną ilość razy,
· MACRO (MR), program wykonujący instrukcje makro,
tzn. jest to oddzielny program zawierający ciąg instrukcji,
które wykonują jakieś zadania,
· STATE, jest to program warunkowy ze stanem
monitorowania funkcji.
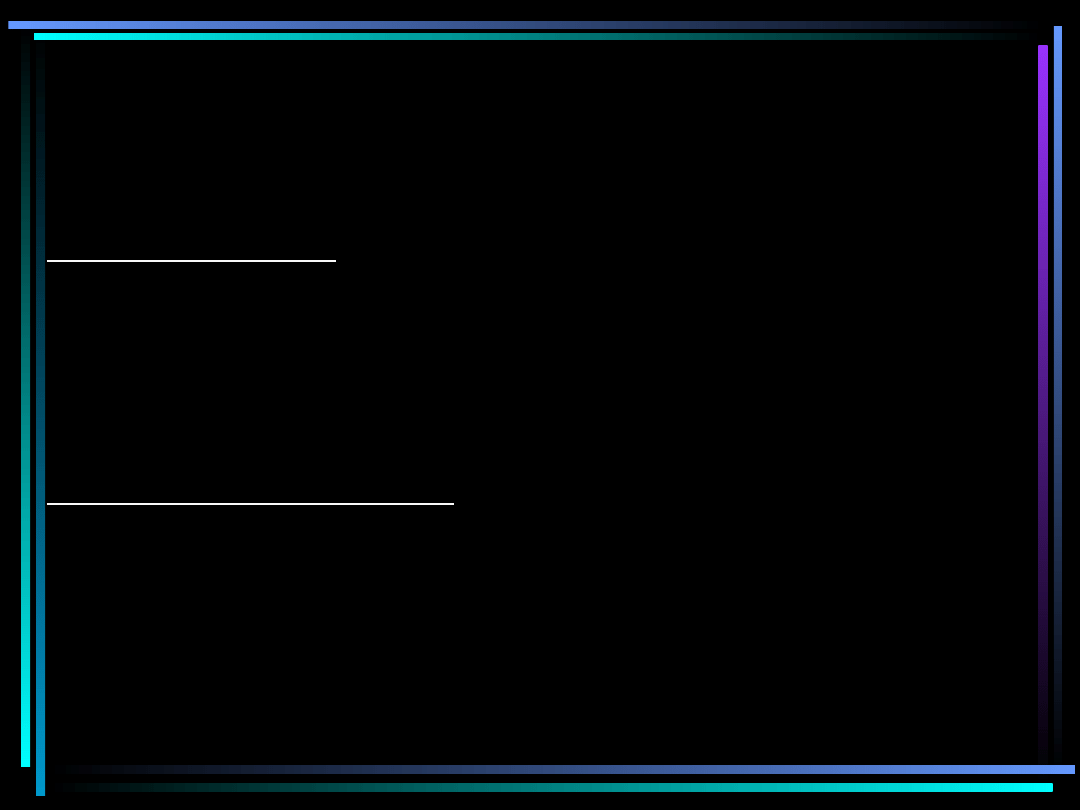
Podstawowe typy ruchów
Joint (J) – podstawowy ruch robota realizujący ruch
od punktu do punktu. Ruch ten zazwyczaj
odbywa się po krzywej. Trajektoria ruchu
robota obliczana jest na podstawie wielu
zależności, a wyliczony tor jest torem
najdogodniejszym. Ruch jest powtarzalny,
tzn., jeśli raz robot przejedzie między
dwoma punktami, to później już zawsze
będzie powtarzał raz wyliczoną drogę. Ruch
między punktami odbywa się ze stałą,
zaprogramowaną
prędkością
i
przyśpieszeniem. Także, w ruchu, zawsze
występuje
parametr,
który
wyznacza
dokładność osiąganego punktu
Podstawowe typy ruchów
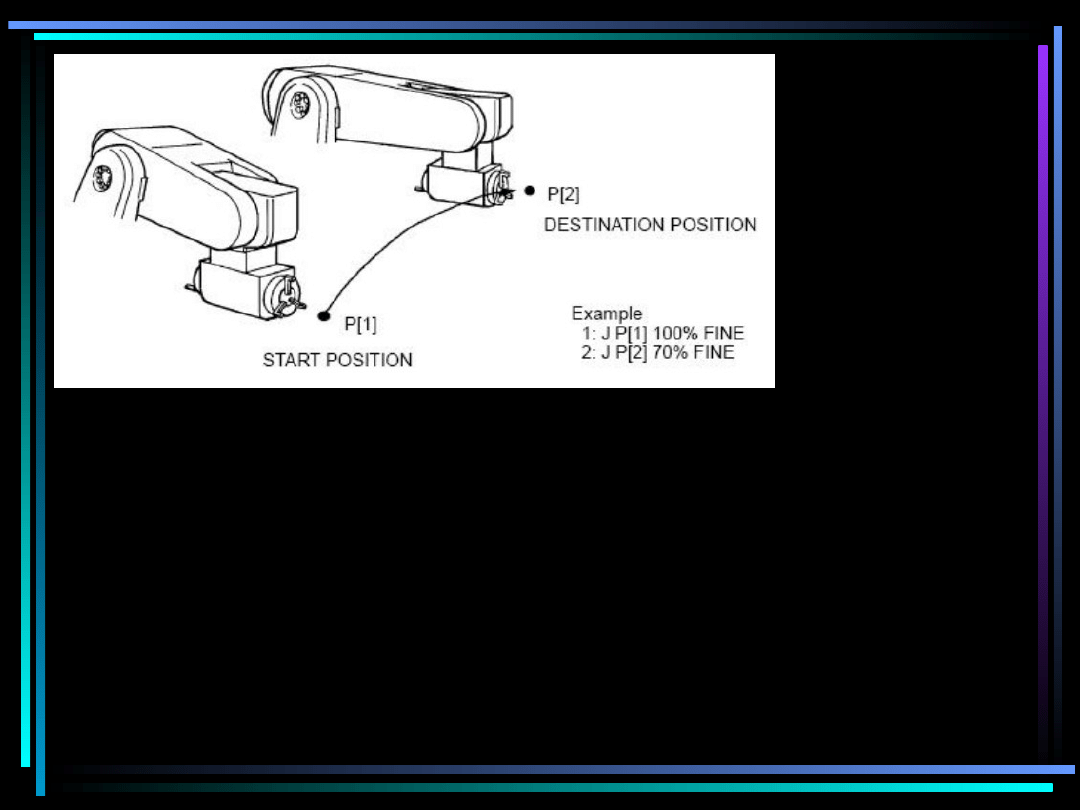
Linear motion (L) ruch liniowy– w tym trybie ruch
odbywa się po linii prostej z użyciem
interpolatora.
Ścieżka
ruchu
robota
odwzorowana jest przez TCP – punkt
centralny, od punktu początkowego do
końcowego.
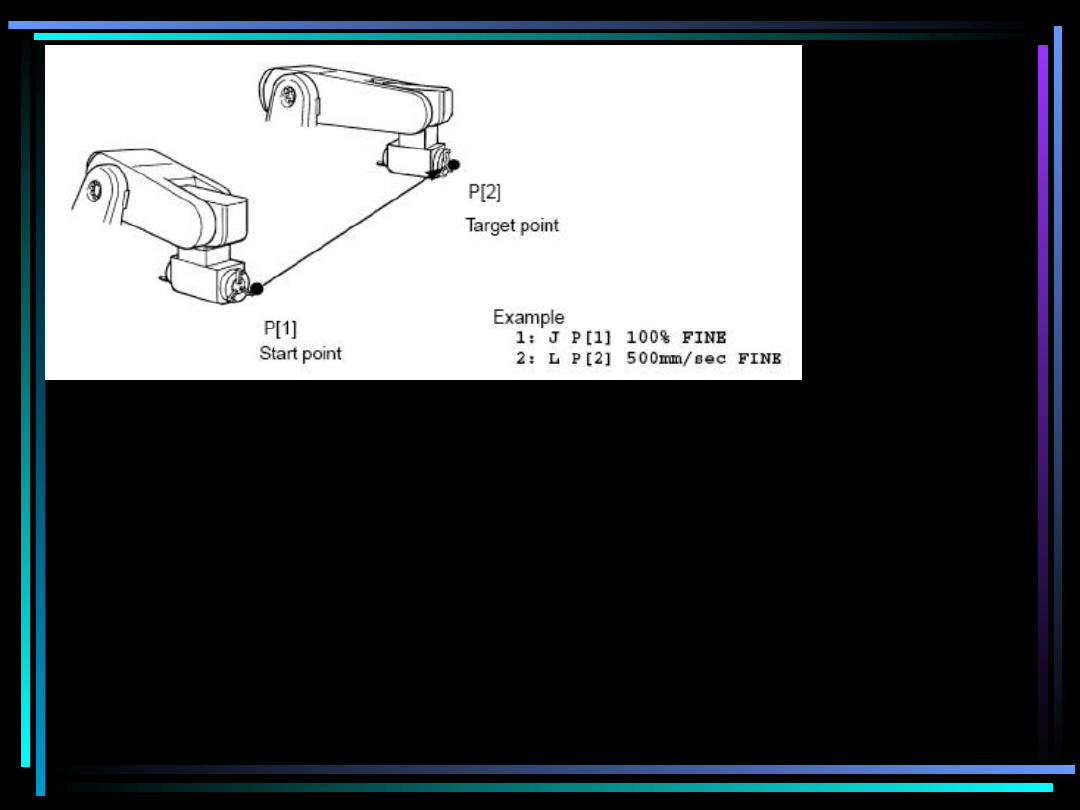
Circular motion (C) ruch po łuku – jest to ruch,
który
odbywa
się
po
krzywej
poprzez
zdefiniowane trzy punkty
Podczas ruchu typu joint robot obraca każdą z osi
niezależnie
w
ten
sposób,
aby
uzyskać
zaprogramowane położenie w przestrzeni. Prędkość
między zaprogramowanymi punktami można podać w
procentach (od 1% do 100%) lub w postaci czasu, w
jakim robot powinien wykonać ruch między punktami.
Ruch tego typu jest dużo szybszy w stosunku do ruchu
liniowego bądź po łuku. Jednak jego dokładność jest
mała w związku, z czym nie nadaje się on do
dokładnych operacji, takich jak cięcie, spawanie, itp.
Tryb pracy
typu Joint
Prędkość w tym ruchu podana jest w
jednostkach:
mm/min,
cm/min,
inch/min.
Maksymalna prędkość w tym ruchu wynosi 2000
mm/s. Ruch liniowy bardzo dokładnie odwzorowuje
trajektorię ruchu, jednak jest on dużo wolniejszy od
ruchu joint i należy używać go tylko w przypadku
konieczności, ponieważ w znaczny sposób spowalnia
proces produkcyjny.
Programowanie
ruchu
liniowego
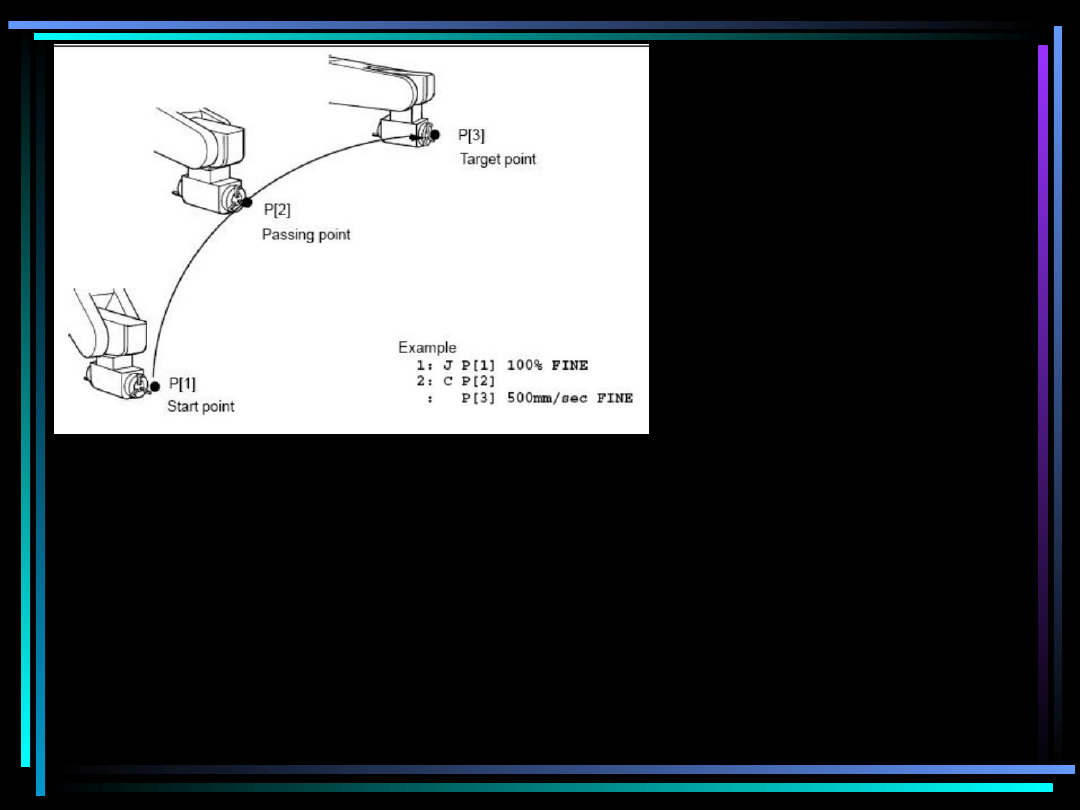
Programowan
ie ruchu po
łuku
Punkt pierwszy można osiągać dowolnym ruchem, punkt
pośredni jest punktem pomocniczym wyznaczającym
stopień krzywizny, punkt trzeci jest punktem docelowym.
Ten ruch, podobnie jak liniowy, jest dużo wolniejszy od
ruchu typu joint i wykorzystuje się go do specjalnych
zastosowań, takich jak np. spawanie po łuku.
Prędkość jest wprowadzana w tych samych jednostkach,
co w ruchu liniowym (
mm/min, cm/min, inch/min)
Dodatkowe konfiguracje funkcji ruchu
FINE
Używane na końcu funkcji ruchu Joint, Linear i Circulal,
powoduje chwilowe zatrzymanie ruchu w punkcie. Robot
dokładnie wykonuje funkcje ruchu
CNT(0-100)
Używane zamiast funkcji FINE. Robot nie dojeżdża do
zaprogramowanego punktu dokładne. W zależności od
wpisanej wielkości (w %), omija go i nie zatrzymuje się
Wrist Joint
Funkcja ta jest używana przy ruchu liniowym lub po
okręgu. W trakcie wykonywania tych funkcji 4 i 5 oś
robota zachowuje się, jakby ruch był zaprogramowany w
układzie Joint (nieliniowo).
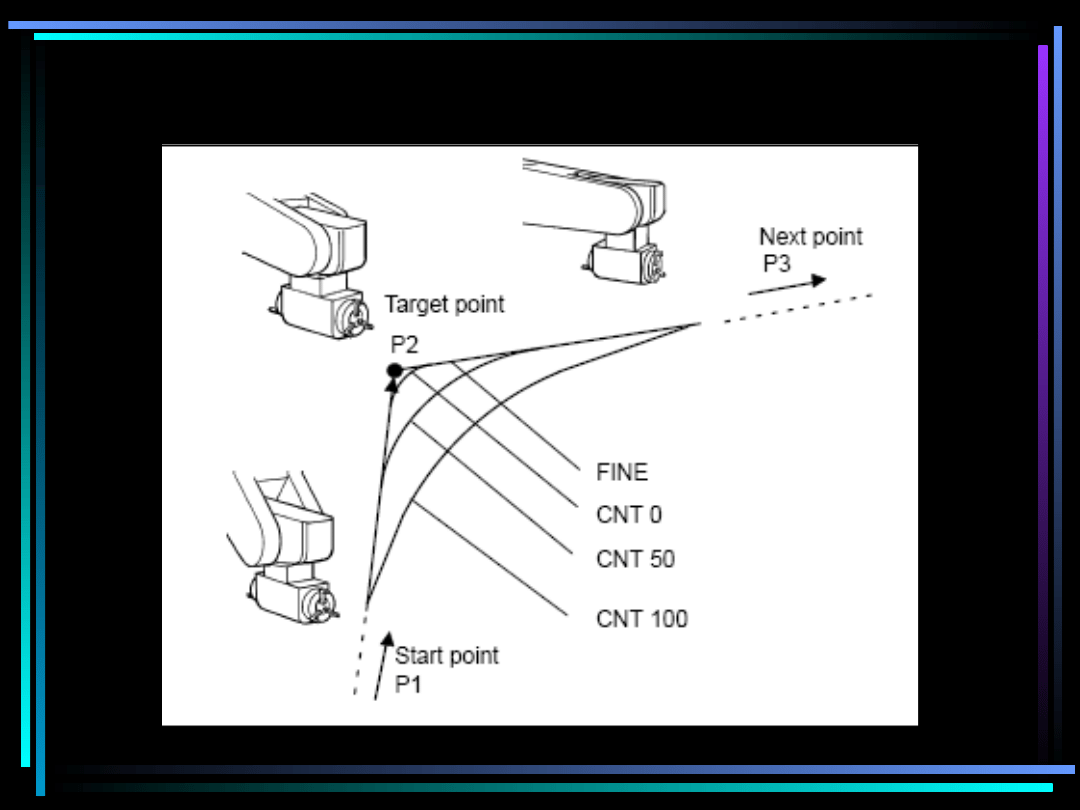
Realizacja funkcji FINE oraz CNT
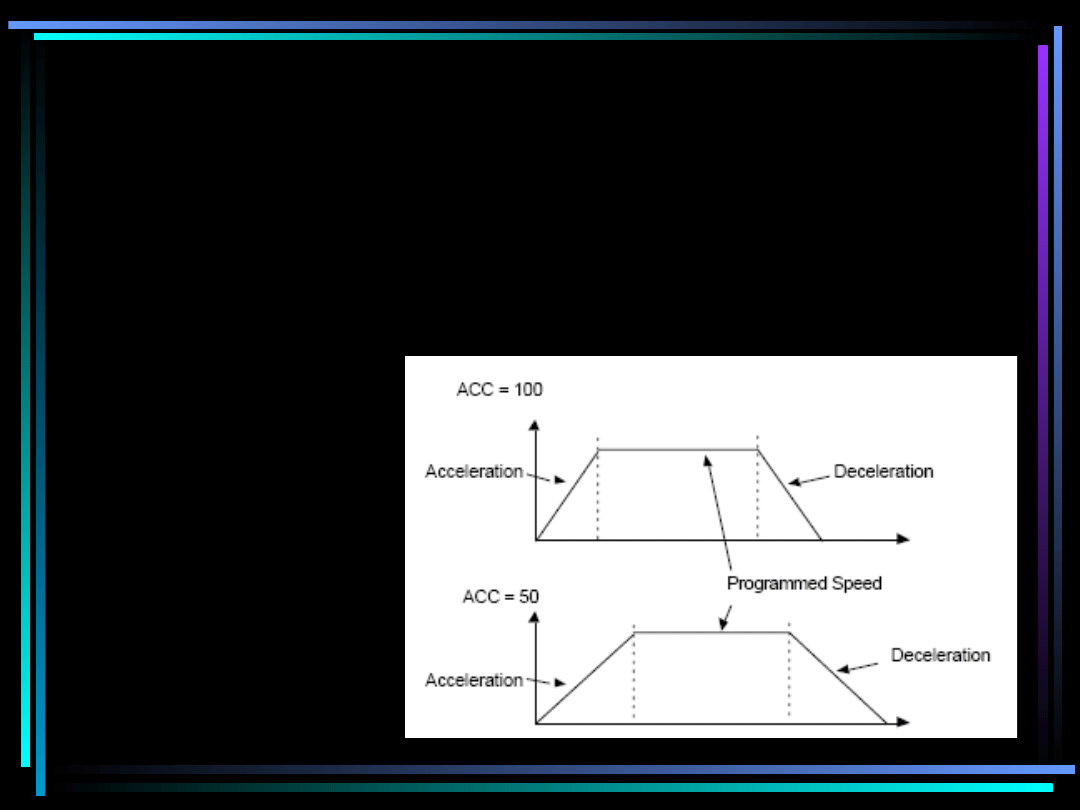
ACC
Określa tempo przyśpieszania i zwalniania w
procentach podczas ruchu. Jeśli parametr ACC
będzie mały to przyśpieszenie i zwalnianie będzie
trwało długo. Jeśli parametr ACC będzie duży czas
przyśpieszania i zwalniania będzie trwał krótko.
Wartość tego parametru może się zmieniać
od 0% do 150%
Position register instructions
PR[ i ] – Position register instructions, zapisuje
pozycję robota, i to numer rejestru pozycji (1 do
10),
PR [ i ] =
(value)
PR [ i ]
- Wartość rejestru pozycji
P [ i ] - Wartość pozycji w programie
Lpos - Bieżąca pozycja w układzie
kartezjańskim
Jpos - Bieżąca pozycja w układzie Joint
UFRAM[ i ] - Numer układu FRAME
UTOOL [ i ] - Numer układu narzędzia
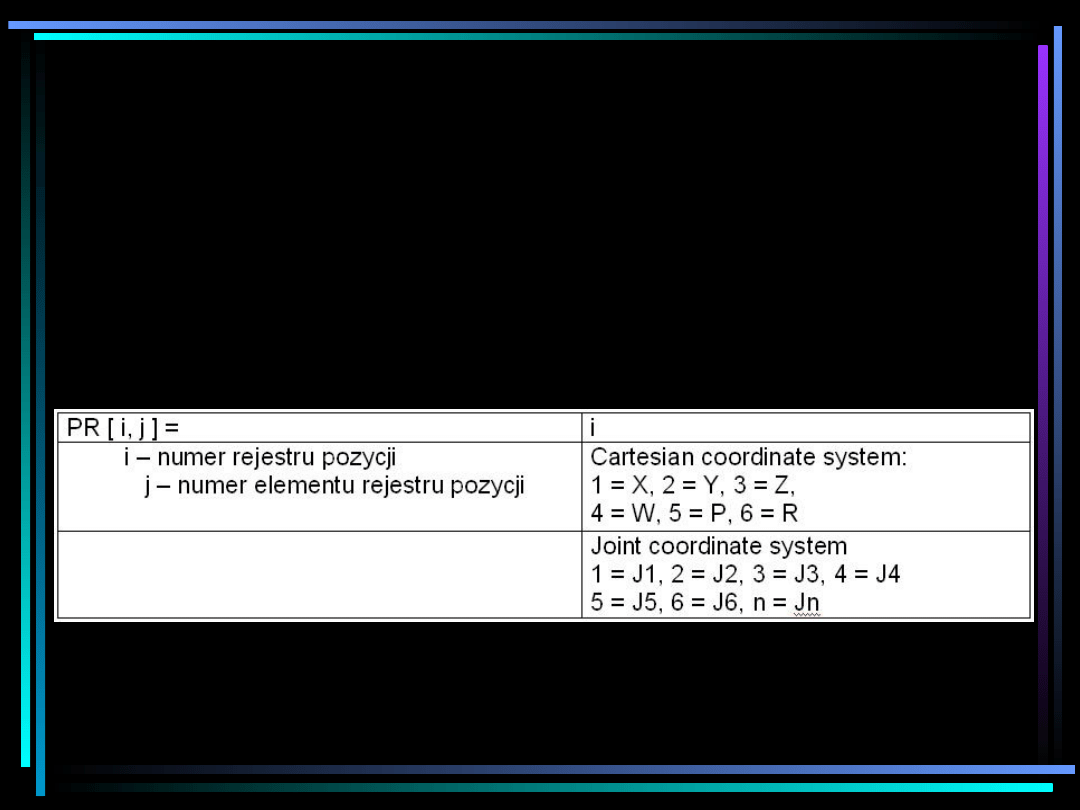
Position register axis instructions
PR[i, j] – Position register axis instructions –
pozwala na odczytanie i zapis wartości
pozycji jednej wybranej osi – i od 1 do 5
lub pozycji w układzie kartezjańskim –
jedną z trzech osi lub kątów,
PTH (path instruction)
Instrukcja ruchu tworzy plan ruchu, pomagając
utrzymać maksymalne tempo ruchu podczas ciągłej
pracy. Funkcja ta jest zaprojektowana, aby
poprawić wykonanie ciągłego ruchu, gdy robot
porusza się na krótkich dystansach pomiędzy
punktami. Można ją wykorzystać, gdy poprzednią
funkcją jest CNT.
Gdy robot porusza się na krótkich dystansach nie
może rozwinąć pełnej prędkości. Spowodowane jest
to czasem potrzebnym na przyśpieszenie oraz
zwolnienie w ruchu pomiędzy punktami. W
przypadku, gdy sposób wykonania ruchu ustawiony
jest na FINE, prędkość robota jest prędkością, jaką
robot może w tej chwili na tym odcinku osiągnąć (a
nie prędkością określoną w programie).
PTH (path instruction)
Planowanie ruchu wymaga obliczenia ścieżki,
wzdłuż której robot będzie się poruszał przed
bieżącą operacją.
Używając instrukcji PTH osiągalna prędkość może
być używana w planowaniu ciągłych ruchów.
Używanie tej funkcji umożliwia:
·
Poprawę czasu cyklu,
·
Poprawę dokładności odwzorowania ścieżki
ruchu.
Funkcja ta jest wydajniejsza, gdy odcinki ruchu są
krótsze, a wartości parametru CNT mniejsze.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
Wyszukiwarka
Podobne podstrony:
Programiowanie robota
Programowanie robota SCORA-ER 14a, DEFP PK1
Programowanie robota SCORA-ER 14a, DEFP PK1
Instrukcja do ćw 09 Roboty przemysłowe Programowanie robota
Programowanie robota SCORA-ER 14, DEFP PK1
Programowanie robota SCORA-ER 14b, DEFP PK1
Instrukcja do ćw 09 Roboty przemysłowe Programowanie robota
Programowanie robota Adept Cobra i600 typu SCARA
Instrukcja programowania off line robota KUKA KR 125
Nowy Prezentacja programu Microsoft PowerPoint 5
Charakterystyka programu
1 treści programoweid 8801 ppt
Programowanie rehabilitacji 2
Rola rynku i instytucji finansowych INowy Prezentacja programu Microsoft PowerPoint
więcej podobnych podstron