Pretekstem do zaprojektowania układu wspomagającego kontakt kierowcy
motoru z pasażerem oraz ze światem poprzez radiotelefon CB. Były prośby ze
strony kolegów " motoromaniaków" żeby wykonać układ prosty w obsłudze i
przy niewielkich nakładach finansowych . Pomysł był świetny, trudno sobie
wyobrazić jazdę na motorze i jednocześnie prowadzić rozmowę z pasażerem. A
już nie wyobrażam sobie bezpiecznego prowadzenia motoru i rozmowy przez
radio CB lub jakikolwiek inny radiotelefon. Prostym rozwiązaniem tego
problemu jest zastosowanie w swoim motorze prezentowanego układu.
Budowa interkomu. Urządzenie umieściłem w obudowie plastykowej z
dwoma uchwytami w której zawarte są wszystkie elementy motorinterkomu .
Na obudowie znajdują się dwa gniazda duży Jack do podłączenia zestawów
mikrofonowo-słuchawkowych kierowcy i pasażera. Znajdują się również,
wyłącznik zasilania, wyłącznik układu VOX-a . Z obudowy wyprowadzone są
następujące przewody:
- przewód zasilający z bezpiecznikiem
- przewód ekranowany z wtyczką do gniazda dodatkowego wyjścia głośnika
CB radia
- przewód płaski sześciożyłowy do gniazda mikrofonowego CB radia
Układ składa się z czterech zasadniczych bloków:
- zasilacza
- układu VOX-a (sterowanie radiotelefonem)
a) wzmacniacz wstępny
b) układ wykonawczy
- toru rozmównego kierowcy
- toru rozmównego pasażera
Rodzaje pracy interkomu:
- rozmowa między kierowcą a pasażerem
- rozmowa kierowcy przez radiotelefon i z pasażerem
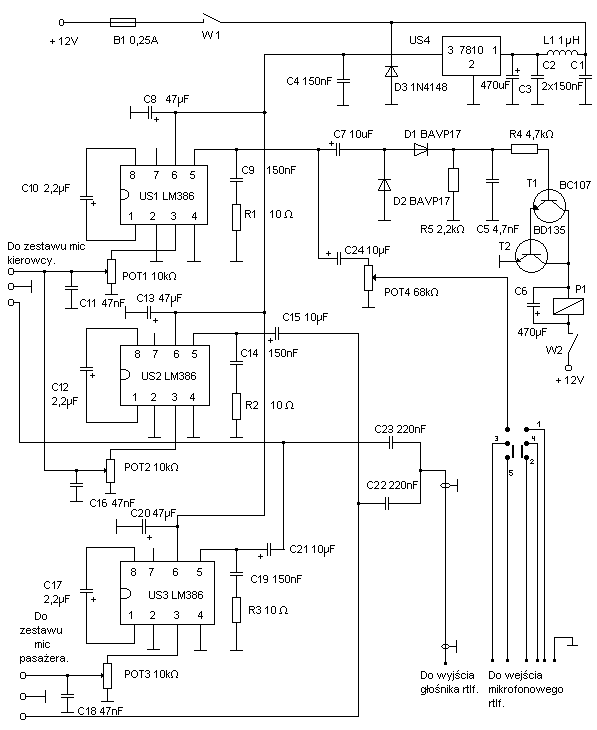
Działanie układu: Sygnał akustyczny z mikrofonu umieszczonego w kasku
kierowcy doprowadzony jest do wzmacniacza toru rozmównego. Kask
połączony jest za pomocą przewodu z zasadniczą częścią interkomu. Sygnał z
mikrofonu kierowcy jest wzmacniany we wzmacniaczu zbudowanym na
układzie US2 LM386. Poziom wejściowy we wzmacniaczu US2 reguluje się przy
pomocy potencjometru POT2 o wartości 10 kom. Wzmocniony sygnał
skierowany jest do słuchawek zestawu rozmównego pasażera. Z zestawu
mikrofonowo - słuchawkowego pasażera sygnał akustyczny wzmacniany we
wzmacniaczu US3 zbudowanym również na LM386 US3, wyjście wzmacniacza
połączone jest z słuchawkami w kasku kierowcy. Identycznie jak w US2 poziom
wejściowy reguluje się za pomocą potencjometru POT3 o wartości 10 kom.
Takie połączenie dwóch oddzielnych wzmacniaczy pozwala na realizację
rozmowy dupleksowej pomiędzy pasażerem a kierowcą motoru. Do sterowania
pracą radiotelefonu w czasie jazdy służy układ VOX-a. Wykonany jest przy
użyciu również układu scalonego LM386 US1. Układ VOX-a jest sterowany
sygnałami akustycznymi pochodzącymi z mikrofonu kierowcy. Sygnał
akustyczny po wzmocnieniu w US1 doprowadzone są do zasadniczej części
VOX-a i również do wejścia mikrofonowego radiotelefonu poprzez styki
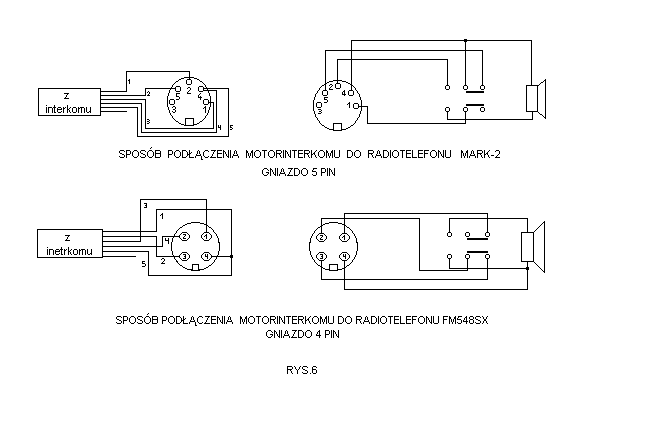
przekaźnika P1. Przekaźnik P1 jest przekaźnikiem o sześciu sprężynach
stykowych przy pomocy którego możemy bez przeszkód dostosować interkom
do sterowania radiotelefonami różnych typów (rys 6). Czułość zadziałania VOX-
a regulowana jest przy pomocy potencjometru POT1 o wartości 10 kom.
Opóźnienie układu VOX-a realizuje się przy zastosowaniu kondensatora C9
który jest włączony równolegle do cewki przekaźnika P1. Ze względu na
wymiary obudowy użytej do budowy interkomu, przekaźnik P1 zamontowany
został na płytce drukowanej w pozycji leżącej. Im większa pojemność
kondensatora C9 tym większa jest zwłoka przy przyciąganiu i zwalnianiu części
ruchomej (kotwicy) przekaźnika P1. Wartość pojemności kondensatora C9
dobrałem eksperymentalnie. W układzie modelowym C9 wynosi
470uF.Elementami układu wykonawczego VOX-a są tranzystory T1 BC107 i
tranzystor T2 BD 135 tworzące układ Darlingtona sterujący pracą przekaźnika
P1. Zasilanie układu motorinterkomu realizowane jest z instalacji elektrycznej
motoru 12V lub z oddzielnego akumulatora. Układ może być zasilany z tej
samej baterii co radiotelefon. Pobór prądu w czasie rozmowy kierowca -
pasażer przy 12V wynosi 25mA. A w czasie rozmowy przez radiotelefon pobór
prądu się zwiększa ze względu na potrzebę zadziałania przekaźnika P1 i wynosi
45mA . Podczas jazdy motorem kiedy nie rozmawiamy przez radiotelefon
możemy wyłączyć część wykonawczą układu VOX-a wyłącznikiem W2. Odcina
on zasilanie cewki przekaźnika P1. Tor rozmówny kierowcy, tor rozmówny
pasażera oraz wzmacniacz wstępny układu VOX-a są zasilane napięciem 10 V
poprzez stabilizator scalony US4 7810. Układ wykonawczy VOX-a bezpośrednio
jest zasilany napięciem 12V. W celu zabezpieczenia motorinterkomu przed
ewentualnym odwrotnym połączeniem zasilania włożyłem w kierunku
zaporowym diodę D3 między masę a plus zasilania. Dodatkowo w dodatnim
przewodzie zasilającym umieściłem bezpiecznik B1 o wartości 0,25A. Celem
uniknięcia ewentualnych zakłóceń ze strony układu zapłonowego motoru,
umieściłem przed stabilizatorem scalonym filtr przeciw zakłóceniowy typu P
złożony z dławika Dł 1 o wartości 1 uH i dwóch kondensatorów C1 i C2 o
wartości 150nF każdy. Włączenie i wyłączenie zasilania układu realizowane jest
przy pomocy wyłącznika W1.
Montaż układu:Jest dość prosty i nie powinien stwarzać kłopotów.
Najistotniejszą rzeczą jest to aby interkom zamontować w takim miejscu
motoru aby nie stwarzał problemów przy eksploatacji . Należy wziąć pod uwagę
długość kabli :
- zasilającego
- kabli do radiotelefonu
- przewodów od zestawów mikrofonowo słuchawkowych kierowcy i pasażera.
Oprócz brania pod uwagę długości kabla od zestawu mikrofonowo
słuchawkowego, ważna jest również łatwość podłączania tych zestawów z
zasadniczą częścią interkomu. Blokowy schemat połączeń przedstawiony jest
na rysunku (rys.2). Najwięcej kłopotów przy budowie motorinterkomu może
stworzyć wykonanie zestawu mikrofonowo słuchawkowego według schematu
rys.4 i umieszczenie jego w kasku . Powinniśmy użyć mikrofonu dynamicznego
do tego celu można wykorzystać wkładkę telefoniczną lub jakąkolwiek inną
słuchawkę np. ze starych słuchawek od Walkmana. Można użyć również
gotowych zestawów mikrofonowo słuchawkowych dostępnych w sklepach
komputerowych i z akcesoriami dla telefonów komórkowych. W kasku cały
zestaw umieszczamy tak aby nie przeszkadzał w czasie jazdy i nie powodował
ugniatania w głowę.
Uruchomienie układu. Po zmontowaniu układu na płytce drukowanej według
rys.6 i podłączeniu zasilania , zestawów mikrofonowo słuchawkowych.
Możemy przystąpić do regulacji motorinterkomu . Regulacji dokonujemy w
czterech punktach za pomocą potencjometrów POT 1-4. Przy pomocy POT 1
ustawiamy czułość zadziałania VOX-a należy dokonać regulacji z
uwzględnieniem tła akustycznego tzn. czułość VOX-a ustawić tak aby hałas
pracującego motoru nie włączał radiotelefonu. Sygnał akustyczny skierowany
do wejścia mikrofonowego regulowany jest przy pomocy potencjometru POT 4.
Tę regulację można przeprowadzić w sposób bardzo prosty przy pomocy
drugiego radiotelefonu. Przy tej regulacji suwak potencjometru ustawić w
pozycję do masy i mówiąc do mikrofonu zestawu mikrofonowo
słuchawkowego kierowcy. Przesuwać suwak POT 4 jednocześnie monitorując
sygnał przy pomocy drugiego radiotelefonu, tak aby nie było żadnych
zniekształceń w sygnale. W przypadku wystąpienia sprzężeń podczas
uruchomiania i regulacji należy sprawdzić poprawność połączeń interkomu z
radiotelefonem co może być przyczyną wadliwej pracy motorinterkomu. Do
regulacji poziomów w torach rozmownych kierowcy i pasażera służą
potencjometry POT 2 i 3. Ustawiamy słyszalność kierowcy i pasażera nawzajem
według własnego uznania , tak jednak aby praca silnika nie zagłuszała
rozmowy między nimi. Jest to regulacja na "ucho" , dość prymitywna ale
pozwala wyregulować układ bez użycia jakichkolwiek mierników. Ostatnią
regulacją po zmontowaniu układu i zamontowaniu na motorze jest
odpowiednie wyregulowanie sygnału wychodzącego z głośnika dodatkowego
radiotelefonu . Regulujemy pokrętłem głośności radiotelefonu i ustawiamy
odpowiedni poziom otwarcia blokady szumów. W celu zabezpieczenia
powierzchni płytki drukowanej przed wilgocią pokryłem druk roztworem
kalafonii w spirytusie. Konstrukcja motorinterkomu jest nieskomplikowana i
może być wykonana nawet przez początkującego "motoromaniaka"
elektronika. Zastosowane rozwiązania konstrukcyjne nie są ostateczne np. w
celu zmniejszenia wymiarów możemy zastosować inny przekaźnik o sześciu
sprężynach lub też inne gniazda do zestawów mikrofonowo słuchawkowych.
Motorinterkom współpracował z radiotelefonem CB Midland CTE 77/102. Każdy
kto się zdecyduje na wykonanie tego układu będzie miał pole do popisu przy
umieszczeniu w kasku zestawów mikrofonowo słuchawkowych. Interkom
używany przez kolegów do rozmowy przez radiotelefon CB lub jakikolwiek inny
w czasie jazdy motorem spisywał się znakomicie.
Literatura:
1. Stanisław Mac "Elektrotechnika samochodowa" WSiP 1992
2. Cezary Rudnicki "Układy scalone w sprzęcie elektroakustycznym" NOT-
SIGMA 1987
3. Andrzej Janeczek "Konstrukcje krótkofalarskie dla początkujących" WKŁ
1994
WYKAZ ELEMENTÓW
REZYSTORY:
R1 10 om
R2 10 om
R3 10 om
R4 4,7 kom
R5 2,2 kom
POT1-3 10 kom
POT4 68 kom
KONDENSATORY:
C1;C2;C4;C9;C14;C19 150nF
C3;C6 470uF/25V
C5 4,7nF
C7;C15;C21;C24 10uF/25V
C8;C13;C20 47uF/25V
C10;C12;C17 2,2uF/25V
C11;C16;C18; 47nF
C23;C22 220nF
PÓŁPRZEWODNIKI:
US1-3 LM386
US4 7810
T1 BC107
T2 BD135
D1-D2 BAVP17
D3 1N4148
PRZEKAŹNIK:
P1 MT-6
DŁAWIK
L1 1uH
Wyszukiwarka
Podobne podstrony:
mapy do celow proj
Seminarium IIIR do kopiowania
Szkol Wykład do Or
ROS wykorzystanie roslin do unieszkodliwiania osadow
Środki miejscowo znieczulające i do znieczulenia ogólnego(1)
Bakterie spiralne do druk
Kolana szpotawe do korekty
Wstęp do psychopatologii zaburzenia osobowosci materiały
3 umyslnosc do wysłania
do kolokwium interna
WYCHOWANIE DO I PRZEZ SPORT
Problem nadmiernego jedzenia słodyczy prowadzący do otyłości dzieci
tablice do analizy konkur
Wykład 1 inżynierskie Wprowadzenie do zarządzania operacyjnego
Wprowadzenie do medycyny rozwojowej 1
34 Zasady projektowania strefy wjazdowej do wsi
więcej podobnych podstron