



Podstawowe oddziaływania w przyrodzie: Grawitacyjne:
Siła zachowawcza (niezachowawcza): zachowawcza: jeżeli
(Masa, ∞, ~10-38); Słabe: (Cząstki elementarne, 10-18m, ~10-15); praca wykonana przez nią podczas ruchu ciała między dwoma Elektro-magnetyczne: (Ładunki elektryczne, ∞, ~10-2); Jądrowe: dow. punktami zależy tylko od tych punktów, a nie od drogi (Hadrony, 10-15m, ~1); Mnożenie wektorów skalarnie:
łączącej je, np. siła grawitacji, kulombowskie siły oddziaływań
elektrostatycznych, siła sprężystości ciał doskonale sprężystych;
a⋅ b = ab cos ϕ ; wektorowo: macierz wertory w 1 wierszu, pod niezachowawcza: jeżeli praca wykonana przez tę siłę podczas
spodem wektor a,b, i rozwinięcie Laplace'a;wzór
ruchu ciała między dwoma punktami zależy od drogi łączącej te
a × b= ab sin ϕ ;
punkty, np. siła tarcia, siła oporu ośrodka;
Zasady dynamiki ruchu postępowego: Dynamika informuje
Praca: jest wykonywana wtedy, gdy pod działaniem siły ciało
nas, że aby znać przyspieszenie punktu materialnego, należy
jest przesuwane na pewną odległość. W=F*s*cosα; Praca może
znać siłę działającą na ten punkt oraz masę, czyli a=F/m
być ujemna, gdy kąt przyłożenia siły α = 180o;
(F=a*m);
Moc: stosunek pracy do czasu w jakim została wykonana:
Zasady dynamiki Newtona: I - W inercjalnym układzie
P=W/t; moc chwilowa: P=dW/dt
odniesienia każde ciało zachowuje swój stan ruchu, gdy nie
Energia potencjalna to energia jaką posiada ciało ze względu
działają na nie siły lub działające siły się równoważą; II - Jeżeli
na swoje położenie. Wyrażamy wzorem E
na ciało w inercjalnym układzie odniesienia działają siły, które nie
p=mgh w ziemskim
polu grawitacyjnym;
równoważą się,to ciało porusza się ruchem zmiennym z
Energia kinetyczna: energia związana z ruchem ciała, każde
przyspieszeniem wprost proporcjonalnym do siły, a odwrotnie
ciało mające energię kinetyczną jest zdolne do wykonania pracy.
proporcjonalnym do masy ciała.; III - Jeżeli na ciało A działa na
ciało B siłą, to ciało B oddziałuje na ciało A taką samą co do
; Energia kinetyczna ulega zmianie, gdy siły działające
wartości siłą, lecz skierowaną przeciwnie. Siły te są jednakowe co na to ciało się nie równoważą. Zmiana energii kinetycznej ciała do wartości i skierowane przeciwnie, lecz nie znoszą się ani nie
jest równa pracy sił wypadkowej działającej na to ciało.
równoważą, gdyż są przyłożone do różnych ciał;
Zasada zachowania pędu: p=m*v. Pęd zmienia się w wyniku
; W ruchu obrotowym, energia
działania na ciało siły przez pewien czas a więc ∆p=F*∆t. Jeżeli
obracającego się wokół własnej osi ciała wynosi Ek=Iω 2/2;
(w układzie inercjalnym) na układ nie działa żadna siła zewn. lub Z
asada zachowania energii mechanicznej energia
działające siły zewn. się równoważą to pęd ciała (układu) nie
mechaniczna jest zawsze stała Em=const, jest sumą energii
zmienia się.
potencjalnej i kinetycznej Em=Ep+Ek, a więc Ep+Ek=const .
Ś
rodek masy (prawo ruchu i zachowania) : Środek masy
Zmianę energii można przeprowadzić tylko przez doprowadzenie
punktów materialnych zależy od ich mas i wzajemnego
jej z zewnątrz lub oddanie jej na zewnątrz;
rozmieszczenia, m1*r1-m2*r2=0; Prawo ruchu środka masy:
energii całkowitej - W dowolnym procesie całkowita energia
środek masy punktów materialnych porusza się w taki sposób
układu izolowanego jest stała. Całkowita energia izolowanego
jakby cała masa układu była skupiona w środku masy, a siły
układu jest taka sama przed, jak i po wystąpieniu przemian w
zewnętrzne działaby tylko na środek masy, uproszczenie
tym układzie. Zmienić energię izolowanego układu można tylko
zastępujące ruch całego układu punktów materialnych ruchem
poprzez dostarczenie jej z zewnątrz, lub w wyniku
środka jego masy. Prawo zachowania środka masy: jeżeli suma
wyemitowania jej poza układ. Energia nie ginie, ani nie powstaje
sił zewnętrznych jest równa zeru czyli siły zewnętrzne nie
samorzutnie Eukładu_izolowanego = const;
działają (układ izolowany), to położenie środka masy nie ulega
Prawa Keplera: I - Każda planeta Układu Słonecznego porusza
zmianie;
się wokół Słońca po elipsie, w której w jednym ognisk jest
Ruch jedn. po okręgu, przysp. styczne i dośr.: Ruch jedn. po Słońce; II - W równych odstępach czasu, promień wodzący okręgu jest przyp. ruchu krzywoliniowego, którego wart.
planety poprowadzony od Słońca zakreśla równe pola; III -
prędkości nie ulega zmianie. W ruchu wyst. siła dośrodkowa,
Stosunek kwadratu okresu obiegu planety wokół Słońca do
powodująca powst. przysp. dośrodkowego(normalnego), które
sześcianu wielkiej półosi jej orbity (czyli średniej odległości od
powoduje zmianę kierunku wektora prędkości. Prędkość kątowa: Słońca) jest stały dla wszystkich planet w Układzie Słonecznym; ω=V/r | ω=2πf; Długość łuku: α=ω*t | α=2π; Częstotliwość: Ruch prostoliniowy jednostajnie przyspieszony
f=1/T; W ruchu krzywoliniowym przyspieszenie liniowe składa się szczególne przypadki: z dwóch składowych: przysp. stycznego at i dośr. ad. at=ε*r; 1
a
rzut pionowy w dół:
a = g v ≠0 v= v gt
s= v t gt2
d=V2/r; Analogie ruch postępowy / ruch obrotowy:
0
0
0
2
a=const / ε=const; V=V0+at / ω=ω 0+εt; s=s0+ V0+0,5*at2 /
α=α
1
0+ω0+0,5*εt2;
rzut pionowy w górę:
a =− g
v ≠0 v= v − gt
s= v t− gt 2
0
0
0
Siła dośrodkowa: siła zakrzywiająca tor ruchu cząstki (po
2
rzut poziomy:
1
okręgu), skierowana prostopadle do toru ruchu.
x= v t
y= gt2 ⇒ x= v
; gdy y= h x= v
0
2
0 2y
g
0 2h
g
Fd=mV2/r | Fd=-mω2r;
Rzut ukośny: ruch krzywoliniowy ze stałym przyspieszeniem
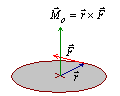
Moment siły (moment obrotowy) to iloczyn wektorowy
a=g; przysp. g i prędkość v
promienia wodzącego r (o początku w punkcie O i końcu w
0, w odróżnieniu od ruchu
prostoliniowego jednostajnie przysp., nie leżą na tej samej
punkcie przyłożenia siły) oraz siły F. Jest to wielkość wektorowa.
prostej. Składowe prędkości pocz.: v
Zaczepiona jest w punkcie O (początku promienia wodzącego), a
0x = v0 cosα, v0y = v0 sinα;
Prędkość chwilowa w kierunku pionowym: v
jej kierunek jest prostopadły do kierunku płaszczyzny
y = v0 – g · t =
= sinα · v
wyznaczonej przez wektor (F) i promień wodzący (r). Zwrot
0 – g · t; Prędkość chwilowa w kierunku poziomym: vx
wektora momentu siły określa się zgodnie z reguła śruby
= cosα · v
prawoskrętnej. Jednostką momentu siły jest
0; czas wznoszenia ( tw):
;
Nm (niutonometr);
Czas lotu ciała:
;
Moment pędu w ruchu obrotowym to co pęd
w ruchu postępowym: p=Mv | L=Iω
Maksymalna wysokość:
;
Moment pędu cząstki względem inercjalnego
układu odniesienia jest analogiczny co moment Zasięg rzutu ( z):
siły (patrz wyżej): L=r x p | L=r·p·sinα; Analogie r. postępowy /
r. obrotowy: p=mV / L=Iω; F=ma / M=Iε; Ek=0,5mV2 /
Ek=0,5Iω 2 ;
Moment bezwładności: miara bezwładności ciała w ruchu obr.
względem osi obrotu, zal. on od wybranej osi, kształtu ciała i
rozmieszczenia masy w ciele.
;
Twierdzenie Steinera: Moment bezwładności (I) względem
dowolnej osi równa się momentowi bezwładności I0
I = I md 2
0
względem osi przechodzącej przez środek masy ciała
(i równoległej do danej osi), zwiększonemu o iloczyn masy
całkowitej (m) ciała przez kwadrat odległości (d) środka mas
ciała od danej osi.;
Zasada zachowania momentu pędu: L = Iω; jeżeli moment
pędu ciała jest stały, a jego moment bezwł. maleje, to jego
prędkość kątowa (obrotu) rośnie (i odwrotnie);
Zasady dynamiki ruchu obrotowego: I - Jeżeli na ciało nie
działa żaden moment siły lub działające momenty sił równoważą
się to ciało pozost. w bezruchu lub obraca się ruchem
jednostajnym.; II - Jeżeli na ciało działa stały i niezrównoważony
moment siły to ciało obr. się ruchem jednostajnie przysp. lub
opóźnionym, w którym przysp. kątowe jest wprost
proporcjonalne do mom. siły a odwrotnie proporcjonalne do
mom. bezwł. ciała. M=Iε;
U
kłady o
dniesienia inercjalny układ, w którym spełniona jest
pierwsza zas. mechaniki Newtona (zasada bezwładności);
nieinercjalny to układ odniesienia, którego wektor prędkości
zmienia się, czyli taki, który ma niezerowe przyspieszenie.
Wektor prędkości może zmieniać tylko swoją wartość (ruch
przyspieszony po linii prostej), tylko kierunek (ruch po okręgu)
lub w najogólniejszym przypadku kierunek i wartość. Charakt.
cechą układów nieinercjalnych jest wyst. w nich sił pozornych.
Siła pozorna jest skierowana zawsze przeciwnie do kier.
przyspieszenia (a) układu nieinercjalnego i ma wartość (–ma),
gdzie m to masa ciała, na które działa siła pozorna;
Wyszukiwarka
Podobne podstrony:
opracowania 1-20, AWF, Metodyka
opracowanie 20-40
opracowania 20-40, AWF, Metodyka
opracowanie 1 20
Opracowanie 7,20,33
prawa człowieka moje opracowanie 20.01.2011, szkoła, US, semestr I
Proza 20-lecia jako tradycja literacka dla powojnia, Polonistyka, 08. Współczesna po 45, OPRACOWANIA
20 Opracowywanie projektu i harmonogramu
20.12.2011, IPSIR UW IV i V rok, resocjalizacyjna pedagogika antropologiczna (opracowane teksty z ć
20 Gleboznawcze opracowania kartograficzne – możliwości ich wykorzystania
ROZDZIAŁ 20 - Układ dokrewny, Medycyna, Patomorfologia, Opracowanie Robbins
PPG opracowanie, 12 strefy ekon., USTAWA z dnia 20 października 1994 r
PPG opracowanie, 12 strefy ekon., USTAWA z dnia 20 października 1994 r
więcej podobnych podstron