Kinematyka
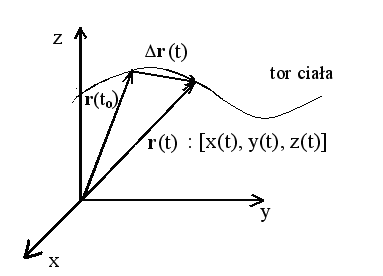
TOR RUCHU
Punkty materialne to obiekty obdarzone masą, których rozmiary (objętość) możemy zaniedbać.
Pod pojęciem ruchu rozumiemy zmiany wzajemnego położenia jednych ciał względem drugich wraz z upływem czasu.
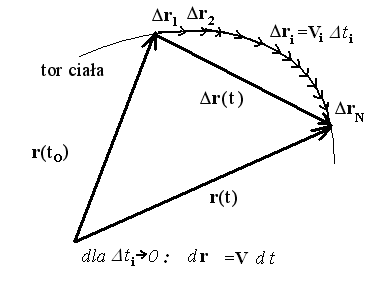
Tor ruchu to krzywa jaką w przestrzeni zakreśla punkt materialny.
POŁOśENIE
r (t) [
=
x( t), y( t), z( t)]
lub
x = x( t) kinematyczne
równania
y = y( t) ruchu
z = z( t) Układ kartezjański
PRZEMIESZCZENIE
∆r (t) [
=
∆ x( t), ∆ y( t), ∆ z( t)]
1
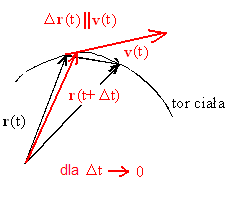
∆r(t)
tor ciała
r(t)
r(t+∆t)
PRĘDKOŚĆ CHWILOWA PRZYSPIESZENIE CHWILOWE
d (
r t)
2
dv( t)
d r( t)
(
v t)
=
a( t) =
=
dt
2
dt
dt
t
t
r( t) = r( t ) + ∫ v( t') dt'
v t
( ) = v t
( )
a
0
+ ∫ t(') dt'
0
t
t
0
0
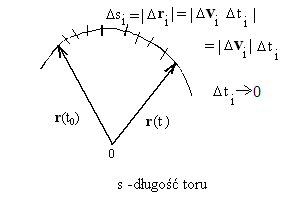
DROGA
t
s( t) = ∫ v t ( ') dt'
t 0
ds
v( t) =
Wartość prędkości dt
to szybkość
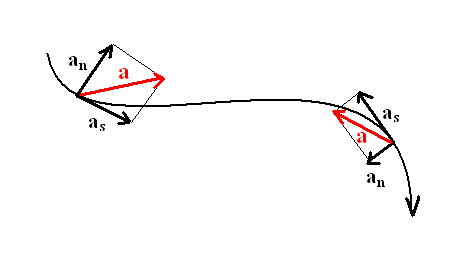
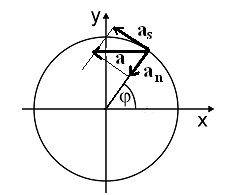
PRZYSPIESZENIE STYCZNE
I NORMALNE
dv t
( )
a ( t) =
s
dt
a ( t)
2
= a ( t)
2
− a ( t)
n
s
2
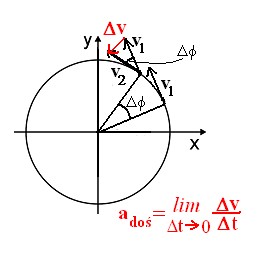
PRĘDKOŚĆ I PRZYSPIESZENIE ŚREDNIE
Wektorowe:
r t
( ) − r t
( )
r
0
∆ t
v
=
=
( )
ś r
t − t
t
0
∆
v t
( ) − v t
( )
v
0
∆ t
a
=
=
( )
ś r
t − t
t
0
∆
Liniowe:
Uwaga:
≠
s( t)
s t
( )
( v)
| v |
ś r
ś r
( v) =
=
ś r
t − t
t
≠
0
∆
( a )
| a |
st
ś r
ś r
v t
( ) − v t
( )
0
∆ v t()
( a ) =
=
st
ś r
t − t
t
0
∆
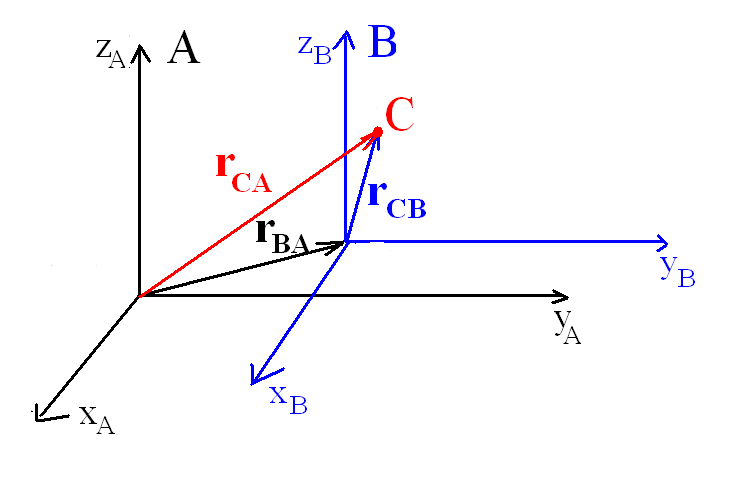
WZGLĘDNOŚĆ RUCHU
Względne położenie: r (t)
=
r (t) + r (t) CA
CB
BA
Względna prędkość: Względne przyspieszenie: dr (t)
dr (t)
dr (t)
dv
(t)
dv
(t)
dv
(t)
CA
=
CB
BA
+
CA
=
CB
BA
+
dt
dt
dt
dt
dt
dt
v
(t)
=
v
(t) + v (t) a
(t)
=
a
(t) + a (t) CA
CB
BA
CA
CB
BA
3
PRZYKŁADY RUCHU
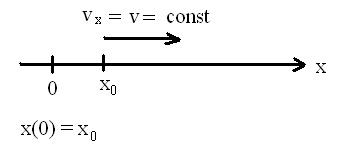
Ruch w jednym wymiarze:
Ruch jednostajny prostoliniowy v = o
c
nst
x
= x ± v
t
równanie ruchu
0
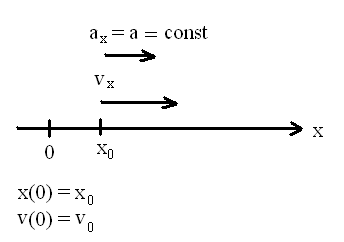
Ruch jednostajnie zmienny prostoliniowy a = o
c
nst
v = v 0 ± a t 2
at
x = x ± v t ±
równanie ruchu
0
0
2
Ruch w dwóch wymiarach:
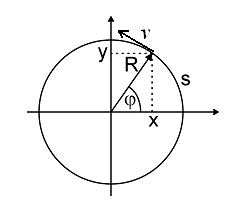
Ruch po okrę gu
Układ kartezjański:
Układ biegunowy:
r t
( )
x( t) = R cosϕ( t)
= R = const.
równania
y( t) = R sinϕ( t) ruchu
s( t)
ϕ t
( ) =
R
vx = − Rωsinϕ
d
v
v
= ϕ
ω
=
y = Rω cosϕ
dt
R
x = ε
a
vx −
2
xω
ω
dω
ε =
ε
2
a
dt
y =
vy − yω
ω
lub inaczej:
ε
ε
2
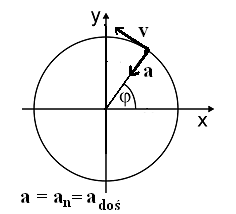
a =
v ,
a = a
= − rω
a =
v
2
− ω r
S
n
doś
ω
ω
4
Ruch w dwóch wymiarach:
Ruch po okrę gu – stała prę dkość ką towa Układ kartezjański:
Układ biegunowy:
x t
R
ϕ ω
0
( ) =
cos(
+ t)
r( t) = R = const.
równania
y( t) = R sin(ϕ
ω
ruchu
0 +
t)
ϕ( t) = ω t + ϕ0
v
ϕ ω
x = − Rω sin(
0 +
t)
ω = const
v
ϕ ω
y = Rω cos(
0 +
t)
a
ε = 0
x = −
2
xω
2
ay = − yω
lub inaczej:
2
a
2
= −ω r
a = 0 , a = a
= − rω
S
n
doś
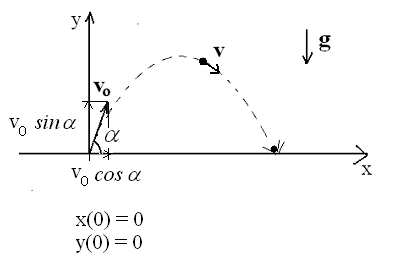
Ruch w dwóch wymiarach:
Rzut ukoś ny
g
0
x =
gy = − g
g
2
y = ( tgα ) x −
x
2
2( v cosα )
0
v
cos
0
α
x = v
− v
θ
v
sin
dv
gt
sin
0
0
α
y = v
− gt
a =
=
g
S
dt
2
v − 2 v gt sinθ + g 2 t 2
0
0
v cosθ
0
=
x = ( v cosα ) t a
g
n
0
2
v − 2 v gt sinθ + g 2 t 2
0
0
2
równania
gt
y = ( v sinα ) t ruchu
0
−
2
5
Oblicz średnią szybkość i średnią prędkość samochodu, który przejeżdża odcinek 120 km z prędkością 60 km/h, a potem, zawraca i jedzie 240 km z prędkością 80 km/h.
Ćwiczenie 2.
Z wieży o wysokości H wyrzucono w dół piłkę z zerową prędkością początkową. W tym samym momencie spod wieży wystrzelono pionowo w górę, w kierunku piłki, pocisk nadając mu prędkość początkowa v . Po jakim czasie pocisk uderzy w 0
piłkę? Zaniedbać opory ruchu.
6
Wyszukiwarka
Podobne podstrony:
Wykł 1B wstępny i kinematyka
Wyklad 06 kinematyka MS
Wyklad 05 kinematyka MS
3 Rodzaje jednorodnych transformacji stosowanych w kinematy
04 Analiza kinematyczna manipulatorów robotów metodą macierz
Mechanika Techniczna I Skrypt 2 4 Kinematyka
03 Kinematyka
fizyka 2 KINEMATYKA PUNKTU MATERIALNEGO
kinematyka manipulatora
kinematyka
zestaw 3 kinematyka
03 Kinematykaid 4394 Nieznany
L6 Kinematyka 2
Kinematyka ukladu korbowego
kinematyka zadania
1 kinematyka (2)
więcej podobnych podstron