IV/6 Podstawowe metody rozwiązywania ustrojów prętowych statycznie niewyznaczalnych (ms , mp)
Kinematyczna analiza konstrukcji
Geometryczna i chwilowa niezmienność - taki układ połączonych ze sobą tarcz w którym nie może nastąpić wzajemne przemieszczenie się jego części bez ich deformacji.

Stopnie swobody= 3 n = 1 s = 0 układ chwilowo chwiejny
n = 3
S = 3T - P - 2R
T - liczba tarcz → s = 3T
P - liczba prętów podporowych → s = - P
R - liczba przegubów → s = - 2R
if s = 0 - układ kinematycznie niezmienny (ma niezbędną liczbę stopni) - eliminujemy źle usytuowane
if s < 0 - układ ma więcej niż trzeba więzi do utrzymania kinematycznej niezmienności
if s > 0 - to układ jest geometrycznie zmienny
Liczba więzi nadliczbowych określana jest przez „n”
n = - s -stopień niewyznaczalności układu
n = a + p + s - 2w
a - liczba niewiadomych podporowych
p - liczba prętów
s - liczba zesztywnień
w - liczba przegubów
n = (2+1+1+1)+3+2-2•4 =
Procedura postępowania w metodzie sił
• n = ? (st. niewyznaczalności)
• przyjmujemy układ podstawowy metody sił UPMS
• zbudow. ukł. równań (model matematyczny) dla n- niewiadomych
∂11x1 + ∂12x2 + ... + ∂1nxn + Δ1p = 0
∂21x1 + ∂22x2 + ... + ∂2nxn + Δ2p = 0
: : : : n- równań
∂n1x1 + ∂n2x2 + ... + ∂nnxn + Δnp = 0 n- niewiadomych
[∂] {X} + {ΔP} = {0}
macierz podatności wektor obciążeń
∂11 ∂12 ..... ∂1n x1 ΔP1 0
∂21 ∂22 ..... ∂2n x2 + ΔP2 = 0
: : : : : :
∂n1 ∂n2 ..... ∂nn xn ΔPn 0
• wyznaczenie M , Mp
• wyznaczenie współczynników w macierzy podatności ∂ij , Δij
• rozwiązywanie układu równań
• wyznaczenie ostatecznie M , Q , N
M(1)ost = M(n)1 X1 + M(n)2 X2 +...+ M(n)n Xn + M(n)p
• zaakceptować wyniki (sprawdzenie)
1. Σ ∫
1a. Szczególny przypadek ( kon. zamknięta)
if EJ = const
if EJ ≠ const
w każdym węźle ma być równowaga
2a. To samo dla sił
równowaga piętra (tam gdzie w piętrze nie ma podpór)
Schematy polowkowe
Całkowanie graficzne
UPMS
M - od siły jednostkowej
Z układu równań mamy x1 , x2
Most = Mp + M1x1 + M2x2
Ostatecznie
Most
+ sprawdzenie.
Podstawowe schematy
Wykorzystamy fakt że: symetria × antysymetria = 0
n = 9+4+3-2⋅5 = 3
Metoda przemieszczeń
Procedura
wyznaczenie stopnia kinematycznej (i geometrycznej) niezmienności
UPMP
Układ równań MP
Wyliczenie współczynnika rij , Rip (czyli rozwiązanie równań i wyznaczenie ϕ i Δ)
Wyznaczyć M]
Wyznaczyć Most , Nost Most = M1ϕ1 + M2ϕ2 + Mp , nk = 2.
Sprawdzenie wykresu Most
Pręt płaski
Zależność między siłami węzłowymi a przemieszczeniami
Vi vi
φzi K ϕzi
Vk • vk
φzk ϕzk
siły macierz przemieszczenia
węzłowe zależności węzłów
Macierz .................
-
-
-
-
Przykład.
IV/7
Obciążenia różnych typów; wpływ temperatury, przemieszczenia wymuszonego, uwzględnienie sprężystego podparcia punktowego i ciągłego, wykorzystanie symetrii układu i obciążeń
I. Typy obciążeń
Ze względu na zmianę wartości obciażenia w czasie, wyróżniamy:
Obciążenie statyczne - wartość zwiększa się powoli od zera do wartości końcowej: uznanie obciążenia za statyczne można zwiazać z najwiekszym okresem drgań własnych konstrukcji. Jeżeli czas zmiany obciążenia jest znacznie większy od największego okresu drgań własnych konstrukcji, to można to nazwać statycznym.
Obciążenie dynamiczne - wartość zmienia się nagle lub okresowo zmiennie lub w chwili przyłożenia do konstrukcji jest skończona.
Zależnie od czasu trwania i sposobu działania obciążenia dzieli się na:
Stałe - wartośc kierunek i położenie pozostają niezmienne w czasie użytkowania budowli, jej montażu i remontu .
Zmienne - mogą zmieniać wartość, kierunek lub położenie w czasie użytkowania budowli:
w całości długotrwałe - np. parcie wody o stałym poziomie zwierciadła
w części długotrwałe - np. ciężar pyłu, obciążenie od suwnic
w całości krótkotrwałe - np. śnieg wiatr
Wyjątkowe - występują w wyniku mało prawdopodobnych zdarzeń w czasie użytkowania budowli (powódź, pożar)
II. Wpływ temperatury
Zmiana temperatury w stosunku do temp. Montażu powoduje wydłużenie pręta w osi i/lub zginanie pręta momentami powstałymi na skutek gradientu temperatur
Siły wewnętrzne powstające pod wpływem tego rodzaju obciążenia można obliczyć za pomocą metody przemieszczeń, gdzie zadane przemieszczenie więzi wynosi α * t *l (α - wsp. rozszerzalności termicznej materiału, t - temperatura, l - długość pręta) lub metodą sił w której wpływ temperatury
uwzględnia się poprzez Δit
równomierne ogrzanie nierównomierne ogrzanie
h - wysokość przekroju.
III. WYMUSZONE PRZEMIESZCZENIE
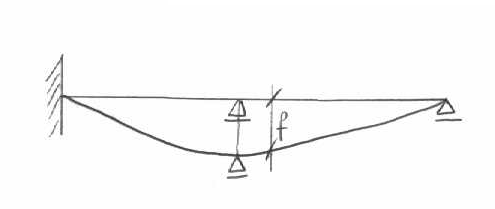
Siły wewnętrzne, w układzie statycznie niewyznaczalnym, wynikłe z przemieszczenia podpór wylicza się za pomocą:
metody przemieszczeń - przemieszczenie podpór f traktuje się jako obciążenie geometryczne, stanowi osiadanie podpór lub wymuszone przemieszczenie węzłów
metody sił - przykładowy układ równań:
gdzie:
- brak obciążeń zewnętrznych
IV. UWZGLĘDNIENIE SPRĘŻYSTEGO PODPARCIA PUNKTOWEGO I CIĄGŁEGO
Wielkością charakteryzującą podłoże sprężyste typu Winklera jest parametr k równy iloczynowi modułu podatności podłoża c i belki b.
W przypadku podparcia punktowego siły wewnętrzne można policzyć za pomocą metody sił. Rozpatrując dwa przypadki: k→ 0 i k→∝ można stworzyć obwiednie sił wewnętrznych
Podparcie ciągłe (podłoże Winklera). Podstawowe założenia:
Podłoże składa się z nieskończenie wielu sprężyn, a odpór odpór takiego podłoża jest wprost proporcjonalny do przemieszczenia.
Brak tarcia między belką a podłożem (więzy gładkie)
Więzy przenoszą ściskanie jak i rozciąganie
Zgodnie z powyższymi założeniami zagadnienie sprowadza się do obliczenia belki obciążonej jak na rysunku
Pod wpływem przyłożonego obciążenia punkty belki doznają przemieszczeń, które związane są z momentami zginającymi: E I w′′(x) = -M(x). Wiedząc, że M′ ′(x) = - q(x) + kw(x) równanie różniczkujemy, przekształcamy, itd. I w rezultacie otrzymujemy całkę ogólną równania w(x).
Mając dane obciążenie oraz warunki brzegowe, znamy przemieszczenia, znajdujemy funkcje momentów i sił poprzecznych. Tak rozwiązuje się belki o nieskończonej długości
Belki o skończonej długości można rozwiązać za pomocą metody Bleicha. Metodę tą stosujemy przy obliczaniu ław fundamentowych, podkładów kolejowych itp. ( Piechnik str.334 ).
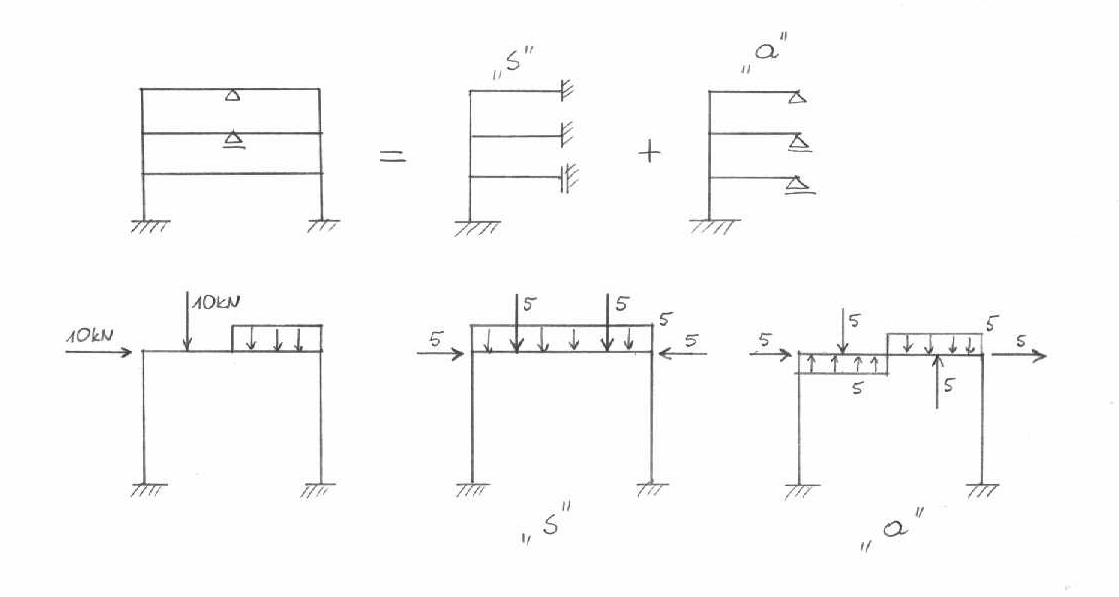
V. WYKORZYSTANIE SYMETRII UKŁADU OBCIĄŻEŃ
W przypadku układów symetrycznych (np. ramy) dla ułatwienia obliczeń stosuje się tzw. schematy połówkowe, które mają mniej stopni statycznej niewyznaczalności niż układ pierwotny. Schematy obciąża się obciążeniem rozbitym na: obciążenie symetryczne i antysymetryczne. Ostateczny wykres sił wewnętrznych otrzymuje się przez zsumowanie wykresów symetrii i antysymetrii.
IV/8
Stateczność prętów prostych i płaskich ustrojów ramowych, postacie utraty stateczności, metody określania sił krytycznych.
I. Stateczność prętów prostych i płaskich ustrojów ramowych
Konstrukcja znajduje się w stanie równowagi statecznej, jeśli po dowolnie małym wychyleniu od położenia pierwotnego konstrukcja wykazuje tendencje do powrotu do tego położenia pierwotnego. Utrata stateczności prowadzi do zniszczenia konstrukcji, gdyż pociąga za sobą duże odkształcenia i to w sposób nagły
Aby konstrukcja znajdowała się w stanie równowagi statecznej muszą być spełnione warunki:
konstrukcja musi być geometrycznie niezmienna
obciążenie konstrukcji musi być mniejsze od krytycznego, przy którym następuje utrata stateczności
Rozważając stateczność rezygnujemy z założenia o zesztywnieniu (zmiany geometrii układu wpływają na zmianę położenia sił)
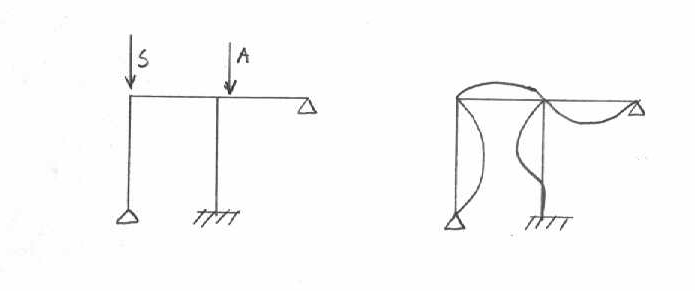
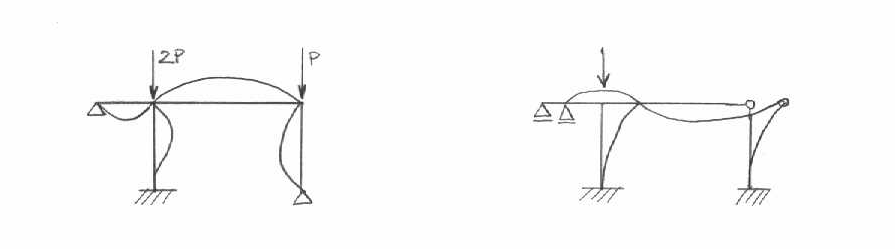
II. Postaci utraty stateczności
Postać utraty stateczności zależy od przyłożonej siły oraz od geometrii ustroju.
III. Metody określania sił krytycznych ( zakres liniowo sprężysty)
- dla prętów prostych
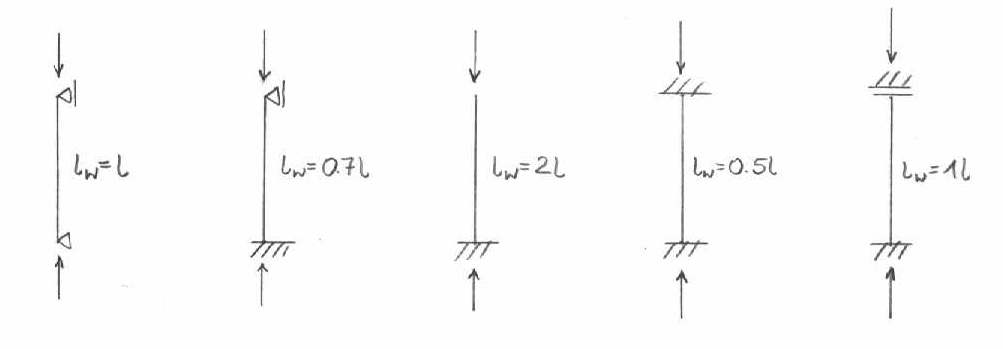
wzór Eulera
lw - długość wyboczeniowa pręta
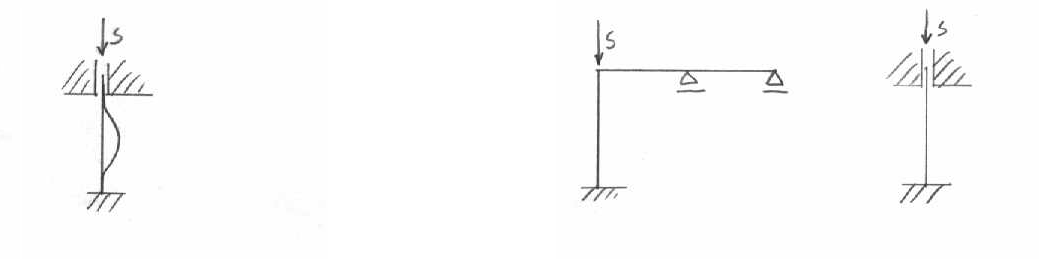
dla płaskich ustrojów ramowych: metoda przemieszczeń
Schemat postępowania:
Dobór układu podstawowego MP
Układ równań MP
Wyznaczenie wsp. zij - nowe wzory transformacyjne dla prętów obciążonych siłą
Rozwiązanie układu równań
6
Podstawowe met rozw. ustrojów prętowych statycznie niewyznaczalnych (MS , MP); zał. , int. fiz. równań, dobór schem. podst.
METODA SIŁ
Stopień statycznej niewyznaczalności
r = 6 → więzy
t = 1 → liczba tarcz
p = 0
n = r + p - 3t
n = 6 + 0 - 3 ⋅ 1 = 3
Ustrój 3- krotnie statycznie niewyznaczalny
Układ podstawowy metody sił - powstaje przez usunięcie więzi
Jakie powinny być x1 , x2 , x3 , aby przemieszczenie pionowe w punktach 1, 2, 3 były równe 0 ?
Stan x1 = 1
Stan x2 = 1
δ11x1 + δ12x2 +δ13x3 + Δ1p = 0
Stan x3 = 1 δ21x1 + δ22x2 +δ23x3 + Δ2p = 0
δ31x1 + δ32x2 +δ33x3 + Δ3p = 0
Stan p = 1
δ11 δ1n
D= macierz podatności
δn1 δnn
x1
X= wektor niewiadomych
x2
Δ1p
DF= wektor wyrazów wolnych
Δnp
DX+DF=0
Mhost = Mh1x1 + Mh2x2 + Mh3x3 + Mhp
1.Wyznaczamy stopień statycznej niewyznaczalności
2.Tworzymy układ podstawowy metody sił (układ statycznie wyznaczalny- tworzymy przez usunięcie więzi nadliczbowych
3.Budujemy układ równań metody sił.Wyznaczamy współczynniki układu
4.Rozwiązujemy układ równań (wyznaczamy siły hiperstatyczne xi)
5.Wyznaczamy rzędne ostatecznych wykresów M.,Q,N w punktach charakterystycznych
6.Sprawdzamy rozwiązanie
METODA PRZEMIESZCZEŃ
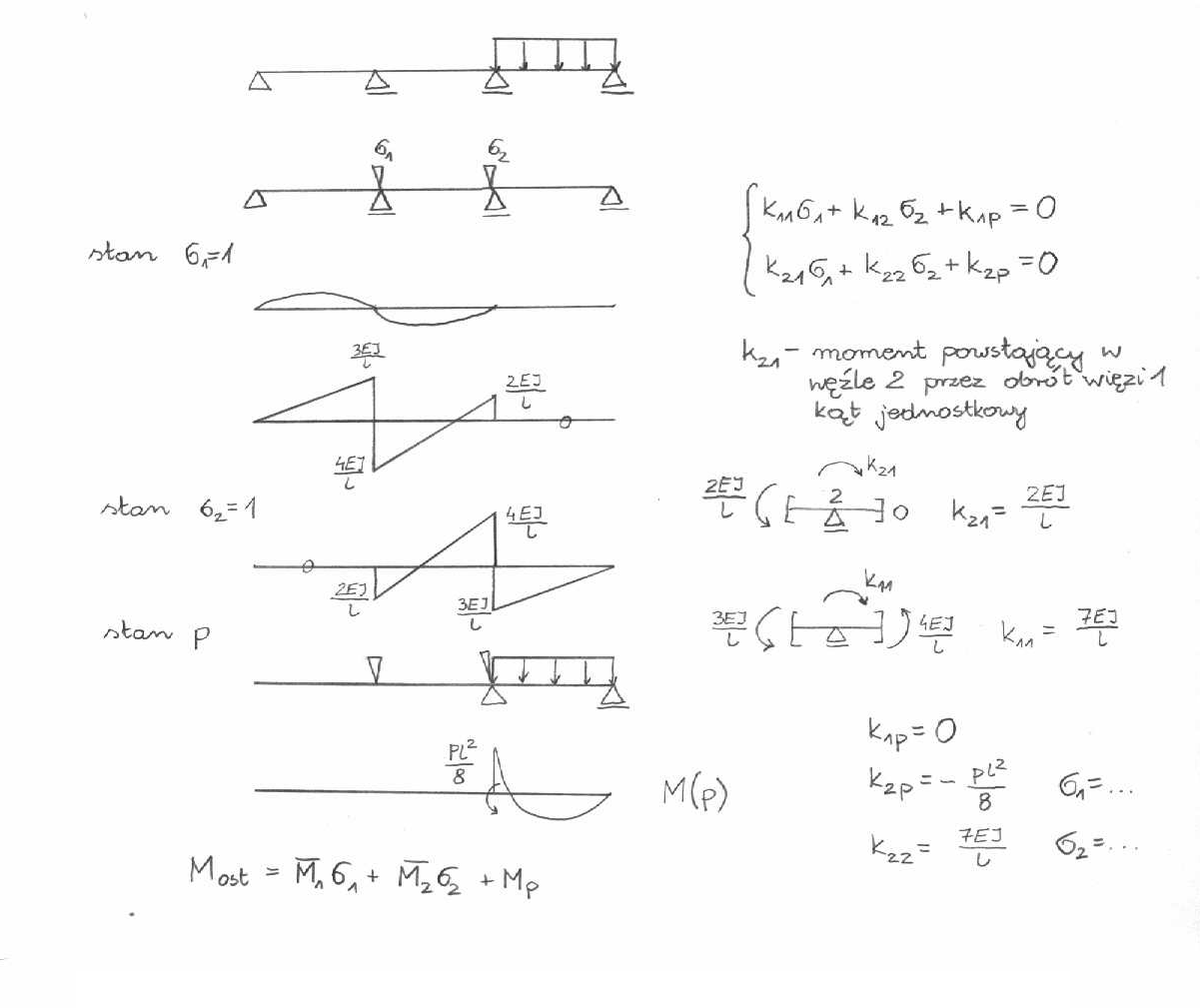
6. Metoda przemieszczeń
Procedura
*wyznaczenie stopnia kinematycznej (i geometrycznej) niezmienności układu
*UPMP
*układ równań MP (wyznaczamy współczynniki k)
*wyznaczamy Most
*sporządzamy wykres
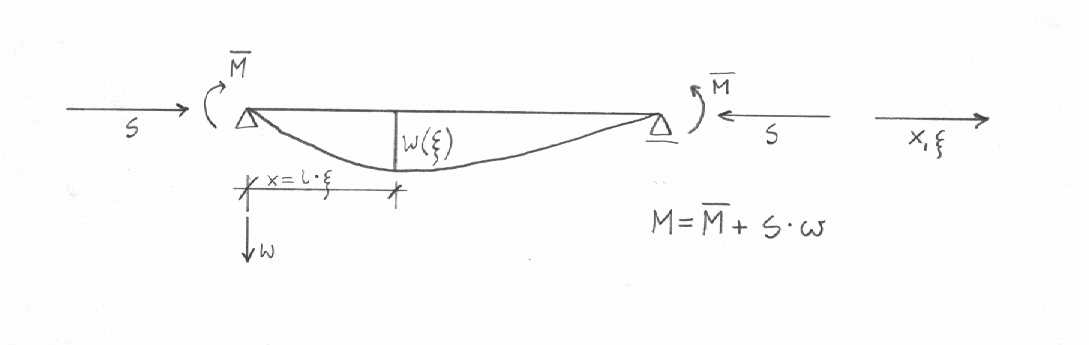
Stateczność prętów prostych
Istota zjawiska utraty stateczności pręta prostego znana jest z kursu wytrzymałości materiałów.Występuje ono w przypadku działania na pręt siły osiowej S o tzw. wartości krytycznej Skryt.Pręt znajduje się wówczas w stanie równowagi obojętnej; jego oś może pozostawać linią prostą,ale również nieskończenie mała dodatkowa przyczyna może wywołać jej wygięcie.Mówimy,że następuje wtedy wyboczenie pręta.Wartość krytyczną siły ściskającej dla swobodnie podpartego pręta o stałym przekroju poprzecznym wyznacza się na podstawie równania Euler'a:
w” + (SI2/EI)*w = 0
Pwyt = (Π2EI)/(μ*l2) - siła Eulerowska
Jeżeli smukłość rozważanego pręta jest większa od smukłości granicznej,to po osiągnięciu przez siłę S wartości krytycznej pręt ulega sprężystemu wyboczeniu.
Pręt ulegnie wyboczeniu przy dowolnejwartości obciążenia zewnętrznego.
W potocznym języku opór jaki stawia pręt zginany,przyjęto nazywać jego sztywnością.
Pręt rozciągany ma większą sztywność na zginanie niż pręt ściskany.
W przypadku gdy siła ściskająca ma wartość Pkr=Π2EI/(μ) sztywność pręta na zginanie jest równa 0.
Efekt polega na zmianie sztywności pręta na zginanie;ma to duże znaczenie w analizie statycznej złożonych ustrojów prętowych.
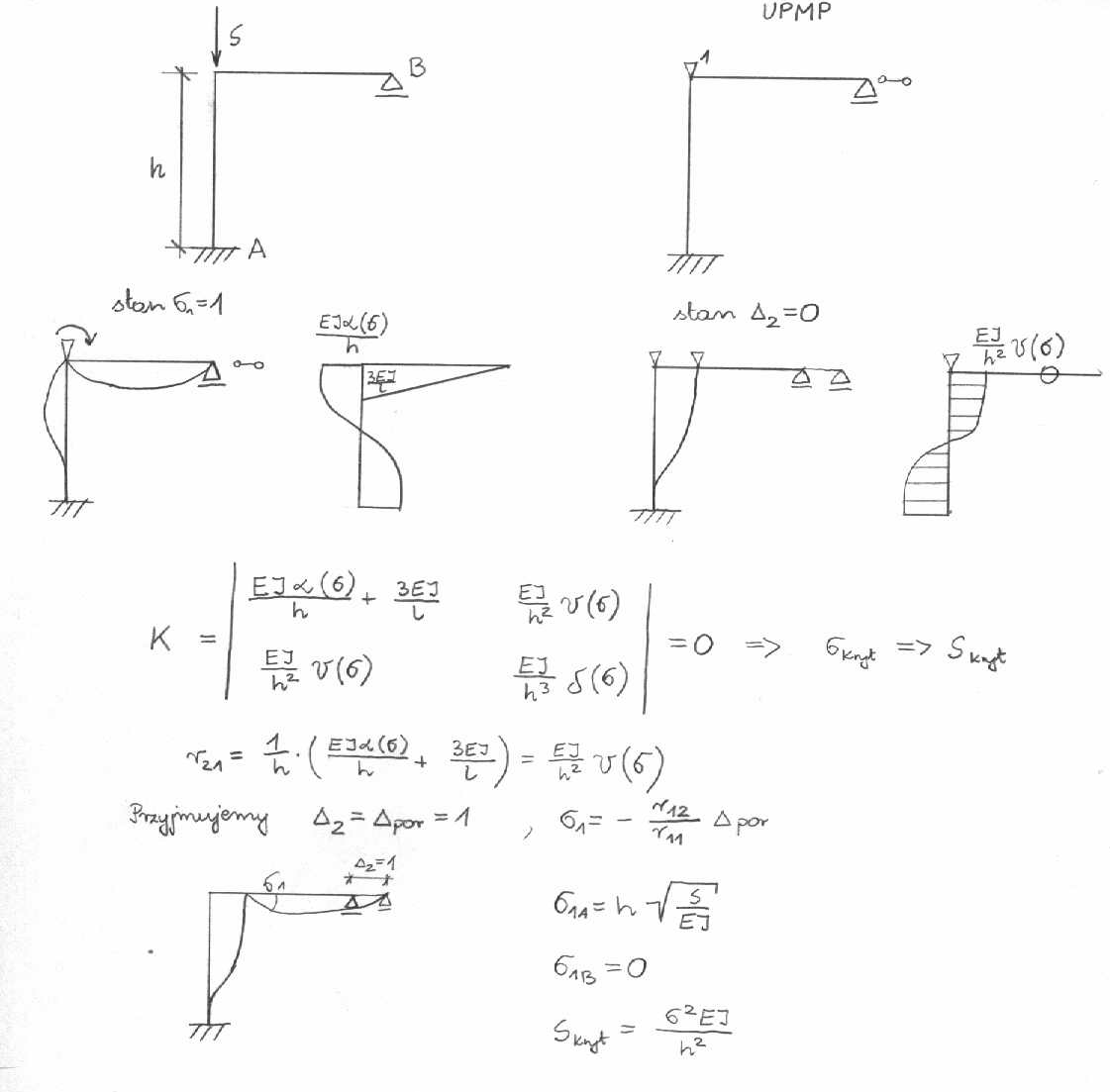
Stateczność płaskich ustrojów ramowych
K*Q=P
K-macierz sztywności
Q-wektor przmieszczeń
P-całkowity wektor obciążeń
Jeżeli założymy brak obciążeń wywołujących zginanie,wówczas wektor P=0, [K]=0
r11б1 + r12Δ2 = 0
r21б1 + r22Δ2 = 0
Postacie utraty stateczności
Konstrukcja znajduje się w stanie równowagi statycznej,jeśli po dowolnie małym odchyleniu od położenia pierwotnego konstrukcja wykazuje tendencje do powrotu do tego położenia pierwotnego.Utrata stateczności prowadzi do zniszczenia konstrukcji,gdyż pociąga za sobą duże odkształcenia i to w sposób nagły.
Aby konstrukcja znajdowała się w stanie równowagi statycznej muszą być spełnione warunki:
konstrukcja musi być geometrycznie niezmienna
obciążenie konstrukcji musi być mniejsze od Pkryt, przy którym następuje utrata stateczności
II.Postacie utraty stateczności:
Postać utraty stateczności zależy od przyłożonej siły oraz od geometrii ustroju
III.Metody określania sił krytycznych (zakres liniowo sprężysty)
* dla prętów prostych wzór Eulera P=Π2EI/lw2
lw - długość wyboczeniowa
dla płaskich ustrojów ramowych: metoda przemieszczeń
Schemat postępowania:
1.Dobór układu podstawowego MP
2.Układ równań MP
3.Wyznaczenie współczynników- nowe wzory transformacyjne dla prętów obciążonych siłą osiową
Stateczność prętów prostych i płaskich ustrojów ramowych
Stateczność
Pojedynczych prętów Układy złożone
Pręt idealny z imperfekcją idealny z imperfekcją
7. Obciążenia różnych typów; wpływ temperatury, przemieszczenia wymuszonego, uwzględnienie sprężystego podparcia punktowego i ciągłego, wykorzystanie symetrii układu i obciążeń.
I.Typy obciążeń:
statyczne - wartość zwiększa się od zera do wartości końcowej,usuwanie obciążenia na statyczne można związać z największym okresem drgań własnych konstrukcji.Jeżeli czas zmiany obciążenia jest znacznie większy od największego okresu drgań własnych konstrukcji,to można to nazwać statycznym
dynamiczne - wartość zmienia się nagle lub okresowo zmiennie lub w chwili przyłożenia do konstrukcji jest skończona
Zależnie od czasu trwania i sposobu działania:
stałe - wartość,kierunek i położenie pozostają niezmienne w czasie użytkowania budowli,jej montażu i remontu
zmienne - mogą zmieniać wartość,kierunek lub położenie w czasie użytkowania budowli
-w całości długotrwałe- np.parcie wody o stałym poziomie zwierciadła
-w części długotrwałe- np.ciężar pyłu,obciążenie od suwnic
-w całości krótkotrwałe- np.śnieg,wiatr
wyjątkowe - występują w wyniku mało prawdopodobnych zdarzeń w czasie użytkowania budowli (powódz,pożar)
II.Wpływ temperatury
Zmiana temperatury w stosunku do temperatury montażu powoduje wydłużenie pręta w osi lub :zginanie pręta momentami powstałymi na skutek gradientu temperatur.
Siły wewnętrzne powstające pod wpływem tego rodzaju obciążenia można obliczać za pomocą metody przemieszczeń, gdzie zadane przemieszczenie wynosi α*t*l,
α- współczynnik rozszerzalności termicznej
t - temperatura
l - długość pręta
lub metodą sił, w której wpływ temperatury uwzględniony jest przez Δit
δ11x1 + δ12x2 + Δ1t = 0
δ21x1 + δ22x2 + Δ2t = 0
Δit = Σ [ ∫Ni*α*tc*ds. + ∫M*α*(ΔT/h)ds. ]
h - wysokość przekroju
∫Ni*α*tc*ds. - równomierne ogrzanie
∫M*α*(ΔT/h)ds. - nierównomierne ogrzanie
III.Wymuszone przemieszczenie
Siły wewnętrzne w układzie statycznie niewyznaczalnym,wynikłe z przemieszczenia podpór wylicza się za pomocą:
metody przemieszczeń - przemieszczenie podpór f traktuje się jako obciążenie geometryczne stanowi osiadanie podpór lub wymuszone przemieszczenia węzłów
metody sił - układ równań:
gdzie Δip = 0 - brak obciążenia zewnętrznego
x1δ11 + x2δ12 + Δ1p = -f
x1δ21 + x2δ22 + Δ2p = 0
IV.Uwzględnienie sprężystego podparcia punktowego i ciągłego.
Podłoże sprężyste typu Winklera charakteryzuje parametr
k = c* b
c - moduł podatności podłoża
b - szerokość belki
np.

Podparcie ciągłe /podłoże Winklera/. Podstawowe założenia:
1.Podłoże składa się z nieskończenie wielu sprężyn,a odpór takiego podłoża jest wprost proporcjonalny do przemieszczenia
2.Brak siły tarcia między belką a podłożem /więzy gładkości/
3.Więzy przenoszą zarówno ściskanie jak i rozciąganie
Zgodnie z zał. zagadnienie sprowadza się do obliczenia belki obciążonej jak na rys.
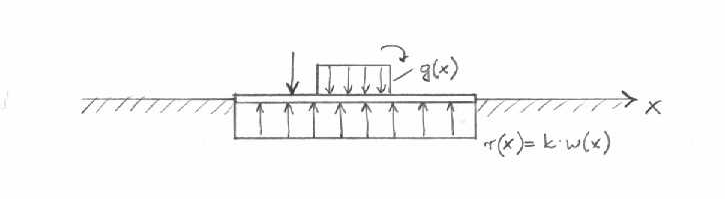
Pod wpływem przyłożonego obciążenia punkty belki doznają przemieszczeń,które związane są z momentami zginającymi EI*w''(x) = -M.(x)
Wiedząc,że M.''(x) = -q(x) + k*w(x) równanie różniczkujemy, przekształcamy itd. i w rezultacie otrzymujemy równania na w(x).
Mając dane obciążenie oraz warunki brzegowe, znamy przemieszczenia,znajdujemy funkcję momentów i sił poprzecznych.Tak rozwiązuje się belki o nieskończonej długości.
V.Wykorzystanie symetrii układu
W przypadku układów symetrycznych stosuje się schematy połówkowe,które mają mniej stopni statycznej niewyznaczalności niż układ pierwotny.Schematy połówkowe obciąża się obciążeniem rozbitym na: obciążenie symetryczne i antysymetryczne .Ostateczny wykres sił wewnętrznych otrzymuje się przez zsumowanie wykresów z symetrii i antysymetrii.
Wyszukiwarka
Podobne podstrony:
PODSTAWOWE METODY ROZWIĄZYWANIA USTROJÓW PRĘTOWYCH STATYCZNI, budownictwo
5 Podstawowe metody rozwiazywania ustrojow pretowych statyc
28 PODSTAWOWE METODY ROZWIĄZYWANIA USTROJÓW PRĘTOWYCH STATYC, budownictwo
05 Podstawowe metody rozwiązywania ustrojów prętowych statycznie niewyznaczalnych
IV. Podstawowe zasady KNS w yciu ekonomicznym-st, EKONOMIA, ekonomia w nauce społecznej Kościoła - W
Podstawy jedności małżeńskiej w świetle Rdz 1, 4. ST, rok IV - księgi historyczne
4 Linie wpływu wielkości statycznych w ustrojach prętowych
Podstawowe metody badań układu oddechowego
Metodyka rozwiązywania zadań, Transport Politechnika, Semestr 1, Fizyka
kim, Inżynierskie, Semestr IV, Podstawy procesów technologicznych
Metody rozwiązywania układów równań liniowych
Egzamin semestralny z przedmiotu PODSTAWY TURYSTYKI rozwiązania
Podstawowe metody badań w psychologii, Pedagogika
AI test1, Studia, ZiIP, SEMESTR IV, semestr IV zaoczny, Metody szt. int
metody rozwiazywania all
IV 2 Podstawy leśnictwa
1 Karta analizy dokumentacji, Inżynierskie, Semestr IV, Podstawy procesów technologicznych
Podstawy woiągów i kanalizacji 15.11.2007, STUDIA, Polibuda - semestr IV, Podstawy Woiągów i Kanaliz
więcej podobnych podstron