
PODSTAWOWE METODY
ROZWIĄZYWANIA USTROJÓW
PRĘTOWYCH STATYCZNIE
NIEWYZNACZALNYCH
WYKONAŁA :
MARTA CEGLARSKA GR.11
Spis treści
1.
Układy konstrukcyjne
2.
Metody obliczania układów statycznie
niewyznaczalnych
3.
Metoda sił
( charakterystyka, algorytm
rozwiązywania, przykład)
4.
Metoda przemieszczeń
(charakterystyka,
algorytm rozwiązywania, przykład)
5.
Porównanie metod
Układy konstrukcyjne
Układy statycznie wyznaczalne - są to układy, dla których z
równań równowagi można jednoznacznie wyznaczyć siły reakcji.
Dla takiego układu liczba reakcji jest równa liczbie niezależnych
równań równowagi, oraz liczba stopni swobody, która zapewnia
geometryczną niezmienność układu jest równa zeru.
UKŁADY STATYCZNIE NIEWYZNACZALNE - są to układy, dla
których z równań równowagi otrzymuje się nieskończenie wiele
rozwiązań na siły reakcji. W takim przypadku liczba reakcji jest
większa od liczby niezależnych równań równowagi, oraz liczba
stopni swobody układu jest równa zeru.
Układy chwiejne - są to układy, dla których równania
równowagi stanowią sprzeczny układ algebraicznych równań. W
tym przypadku liczba reakcji jest mniejsza od liczby niezależnych
równań równowagi, a liczba stopni swobody jest większa od zera.
Metody obliczania układów
statycznie
niewyznaczalnych
Metoda sił
Metoda przemieszczeń
Metoda sił
Metoda sił polega na sprowadzeniu
danego układu niewyznaczalnego do
układu statycznie WYZNACZALNEGO,
przez wprowadzenie w miejsce
odrzuconych więzów niewiadomych sił
(oznaczanych X
1
, X
2
…,
X
n
) tak, aby
układ pozostał geometrycznie
niezmienny.
Stopień statycznej
niewyznaczalności
SSN=r-3-p+3*k
, gdzie:
r – liczba reakcji
p – przeguby
k – liczba pól zamkniętych
Algorytm postępowania w metodzie sił
1.
SSN – stopień statycznej
niewyznaczalności
2.
UPMS – układ podstawowy metody sił
Usuwamy więzi aby układ był statycznie
wyznaczalny
Przecięcie przez pręty – obniżenie o 3 stopnie
statycznej niewyznaczalności
Przecięcie przez przegub – obniżenie o 2 stopnie
statycznej niewyznaczalności
Wprowadzenie przegubu – obniżenie o 1 stopień
statycznej niewyznaczalności ,
Algorytm postępowania w metodzie sił cd.
3.
Stany jednostkowe: X1, X2, … i stan P
( od obciążenia zewnętrznego)
Stan jednostkowy-
rozrysowanie momentów na układzie tylko od
siły X ( w zależności od ilości sił tyle mamy odrębnych
rysunków stanów jednostkowych)
Stan P –
rozrysowanie momentów na układzie tylko od
wszystkich obciążeń zewnętrznych działających na
układ.
Algorytm postępowania w metodzie sił cd.
4.
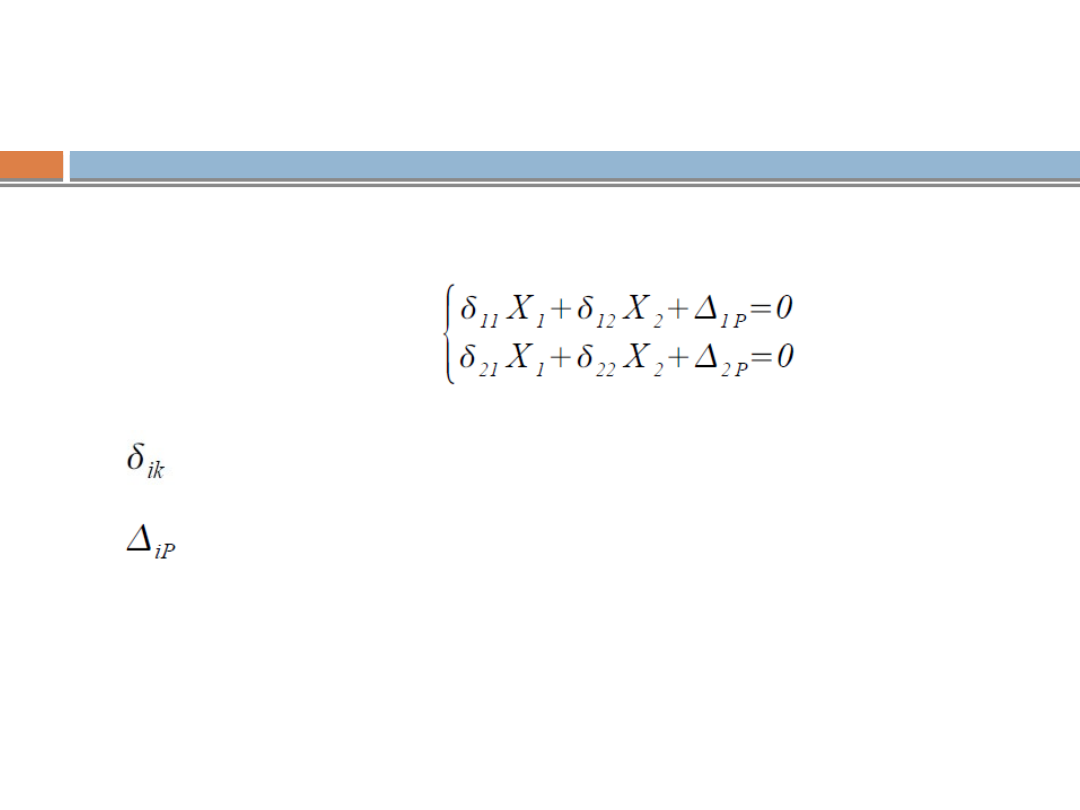
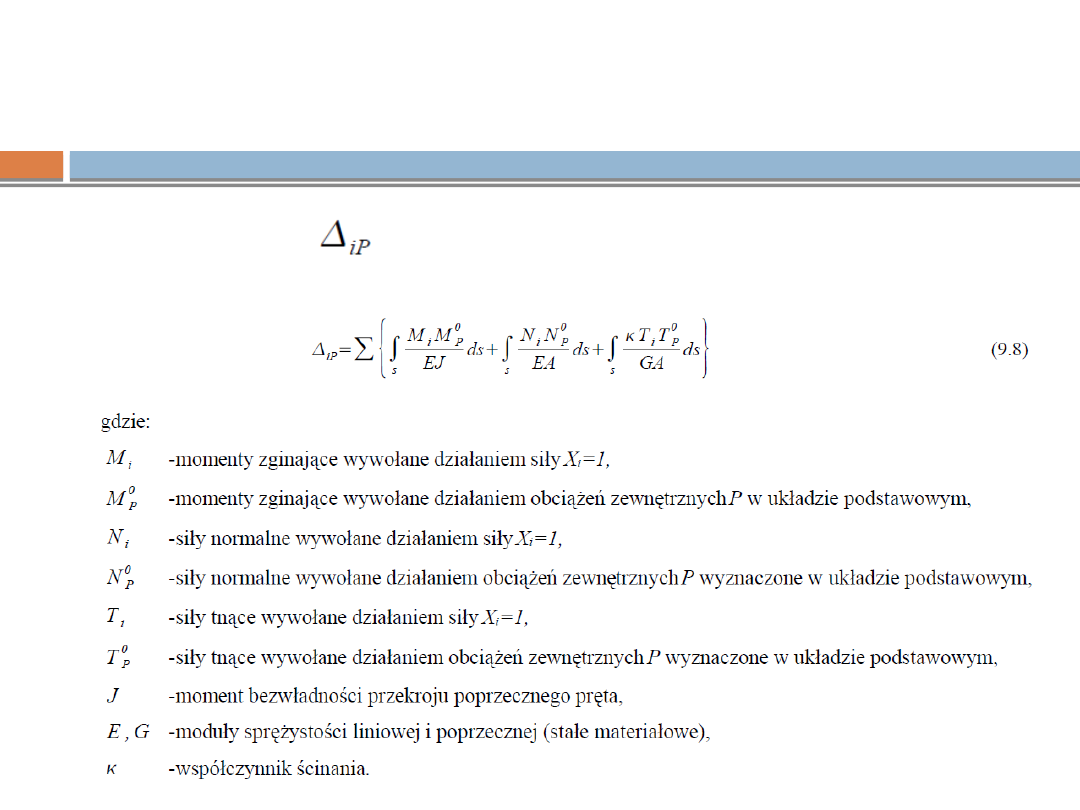
Układ równań metody sił ( równania
równości przemieszczeń):
- przemieszczenie po kierunku niewiadomej X
i
wywołane działaniem siły jednostkowej X
k
- przemieszczenie uogólnione po kierunku
niewiadomej X
i
wywołanej działaniem obciążenia
zewnętrznego P.
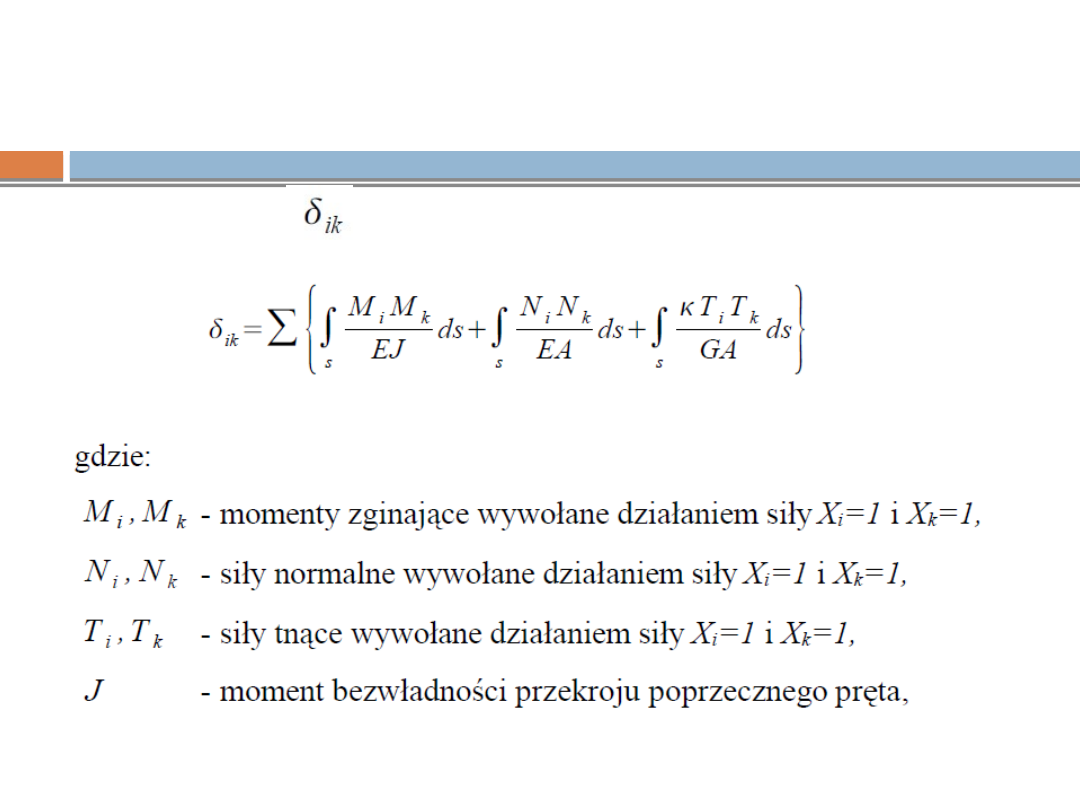
Współczynniki obliczamy ze wzoru:
Algorytm postępowania w
metodzie sił cd.
Algorytm postępowania w metodzie sił cd.
Współczynnik obliczamy ze wzoru:
Algorytm postępowania w metodzie sił cd.
5.
Rysowanie wykresu M ostatecznego:
Metoda superpozycji:
M
ost
= M
1
* X
1
+ … + M
2
* X
2
+ M
P
6.
Sprawdzanie wyników:
e
i=1/EI
* [M
1*
M
ost
]
= |e
i
|/ ≈0.05%
Wycięcie węzłów
Metoda przemieszczeń
Metoda przemieszczeń polega na
sprowadzeniu danego układu niewyznaczalnego
do podanych wzorów transformacyjnych przez
dodanie dodatkowych więzów w postaci obrotów
i przesunięć .
Stopień kinematycznej niewyznaczalności
SKN= ∑
+
∑
, gdzie:
- obroty blokujemy tam gdzie się sztywno
schodzą co najmniej dwa pręty,
∑
=2*w-p, gdzie w- liczba węzłów, p- liczna
prętów w łańcuchu kinematycznym
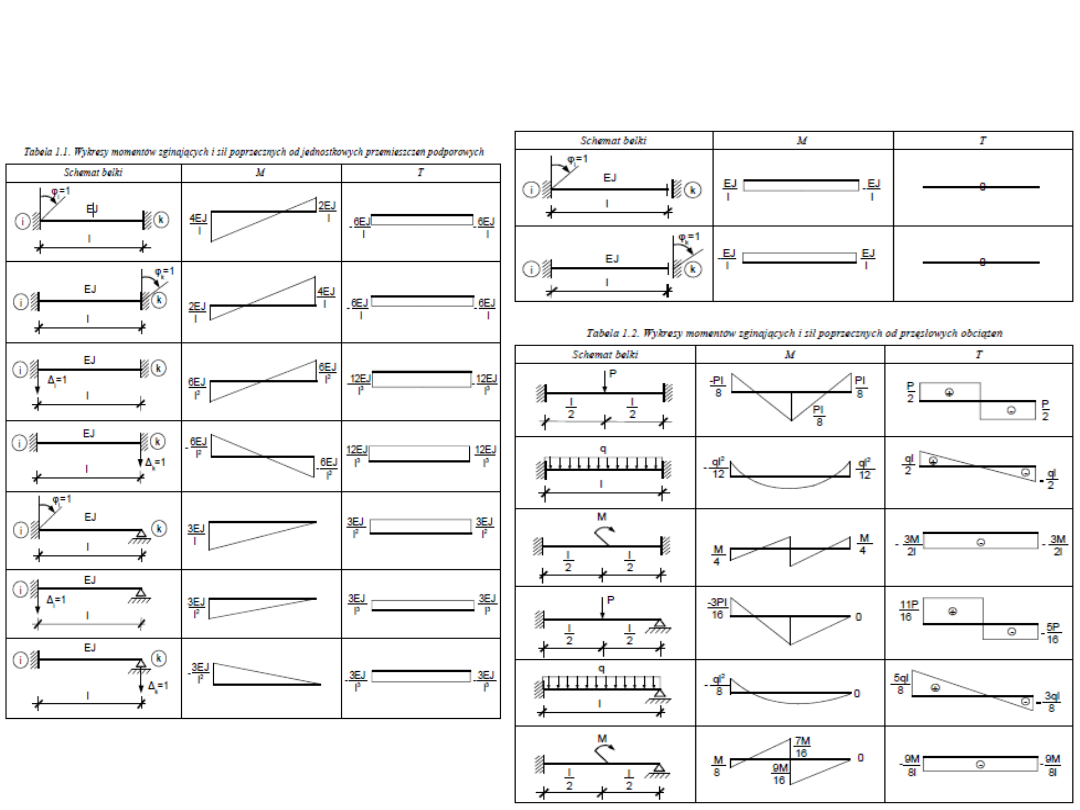
Wzory transformacyjne
WYJĄTKI
Nie wyznaczamy części statycznie
wyznaczalnych ( wspornik, słup)
Gdy ∑ = 0 , sprawdzamy czy układ nie
jest chwiejny lub chwilowo chwiejny
Gdy ∑ < 0 , to SKN= ∑
Algorytm postępowania w metodzie
przemieszczeń
1.
SKN – stopień kinematycznej
niewyznaczalności
2.
UPMP – układ podstawowy metody
przemieszczeń
Odrzucanie części statycznie
niewyznaczalnych
Utworzenie schematu kinematycznego
Wstawianie i numerowanie obrotów i
przesunięć
3.
Rozrysowanie stanów : stan φ
1
=1, …,
stan P.
4.
Obliczanie kanonicznego układu
przemieszczeń:
Algorytm postępowania w metodzie
przemieszczeń
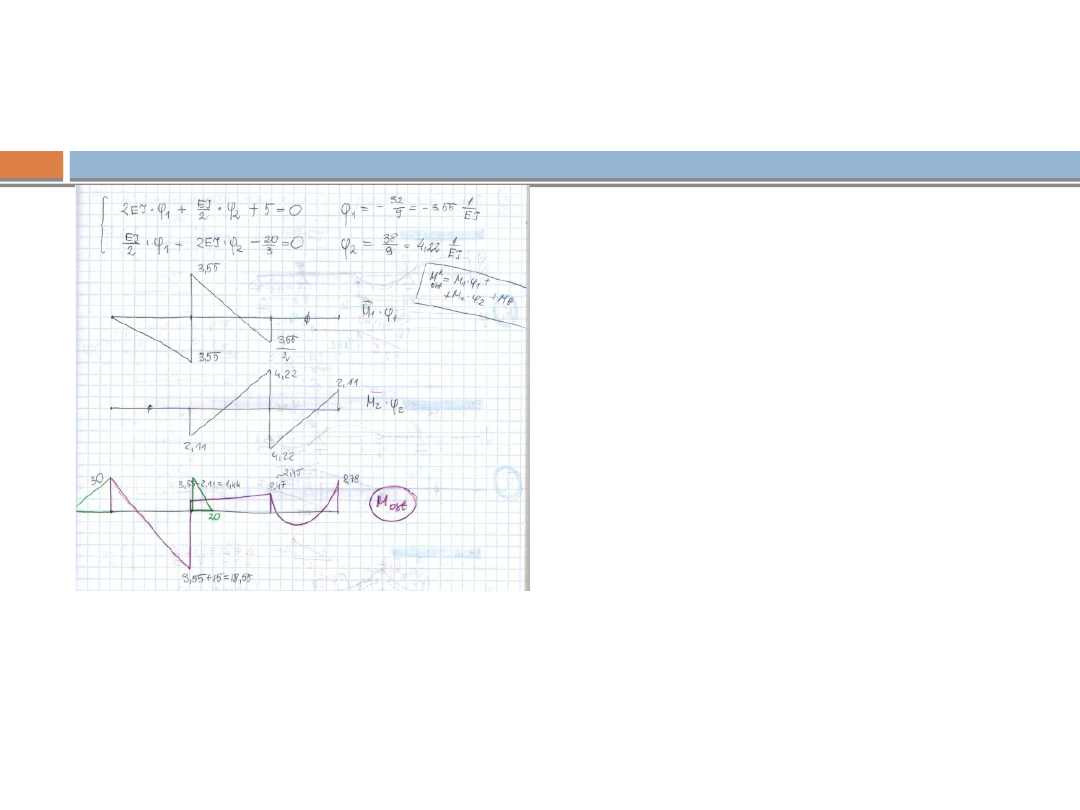
5.
Rysowanie wykresu M ostatecznego:
Metoda superpozycji:
M
ost
= M
1
* φ
1
+ … + M
n
*
n
+ M
P
6.
Sprawdzanie
Równowaga globalna
M
ost
* M jednostkowe ≈0
Sprawdzanie równowagi w węzłach
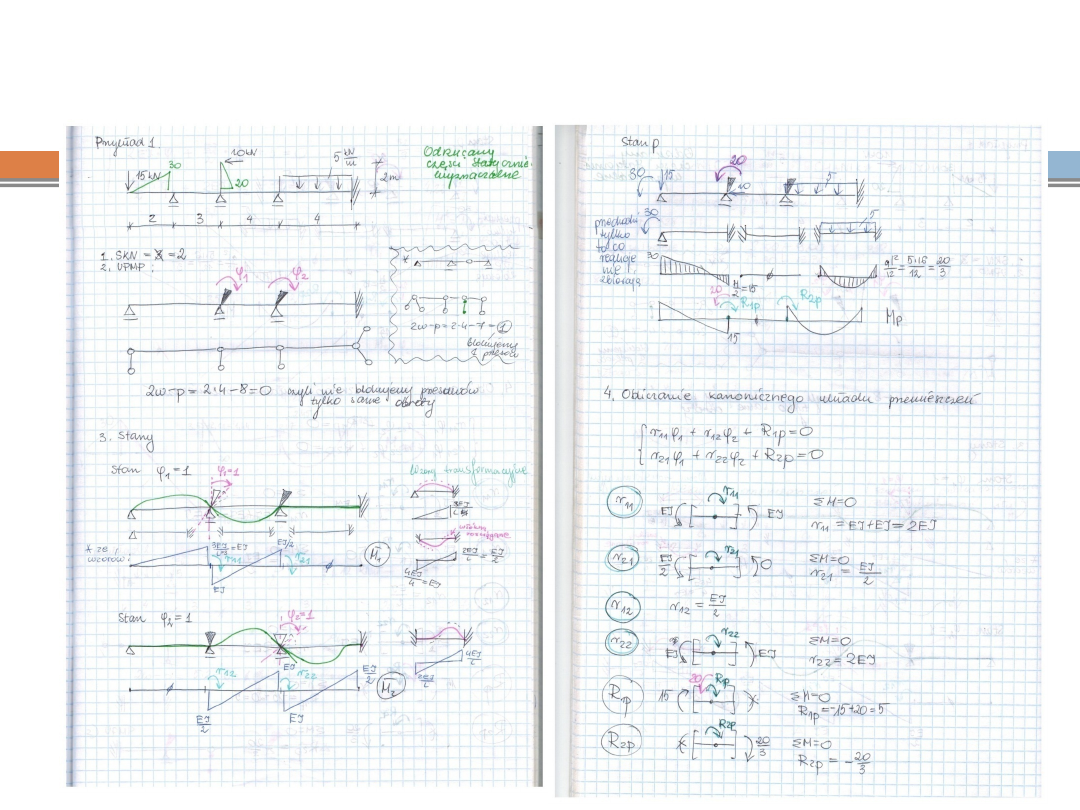
przykład
przykład
Porównanie
METODA SIŁ
METODA
PRZEMIESZCZEŃ
Układ podstawowy
ODEJMOWANIE WIĘZI
DODAWANIE WIĘZI
Niewiadome
SIŁY
PRZEMIESZCZENIA
Warunki do
wyznaczania
RÓWNANIA
RÓWNOŚCI
PRZEMIESZCZEŃ
RÓWNANIA
ROWNOŚCI SIŁ
Bibliografia
http://www.ikb.poznan.pl/almamater/wyk
lady/mechanika_budowli_03-04/czesc1/09
.pdf
http://www.ikb.poznan.pl/almamater/wyk
lady/mechanika_budowli_03-04/czesc2/01
.pdf
http://www.ikb.poznan.pl/almamater/wyk
lady/mechanika_budowli_03-04/czesc2/03
.pdf
Własne notatki z wykładów i ćwiczeń
Document Outline
- Slide 1
- Spis treści
- Układy konstrukcyjne
- Metody obliczania układów statycznie niewyznaczalnych
- Metoda sił
- Algorytm postępowania w metodzie sił
- Algorytm postępowania w metodzie sił cd.
- Algorytm postępowania w metodzie sił cd.
- Algorytm postępowania w metodzie sił cd.
- Algorytm postępowania w metodzie sił cd.
- Metoda przemieszczeń
- Wzory transformacyjne
- Slide 14
- Algorytm postępowania w metodzie przemieszczeń
- Algorytm postępowania w metodzie przemieszczeń
- przykład
- przykład
- Porównanie
- Bibliografia
Wyszukiwarka
Podobne podstrony:
PODSTAWOWE METODY ROZWIĄZYWANIA USTROJÓW PRĘTOWYCH STATYCZNI, budownictwo
5 Podstawowe metody rozwiazywania ustrojow pretowych statyc
28 PODSTAWOWE METODY ROZWIĄZYWANIA USTROJÓW PRĘTOWYCH STATYC, budownictwo
IV,6 8 Podstawowe metody rozwiązywania ustrojów prętowych st
W10b Statycznie niewyznaczalne ustroje pretowe
4 Linie wpływu wielkości statycznych w ustrojach prętowych
4 Linie wplywu wielkosci statycznych w ustrojach pretowych
J Ledziński Mechanika budowli cz 2 Statyka prętowych układów statycznie niewyznaczalnych
P 4 Linie wpływu wielkości statycznych w ustrojach prętowych zygm
4 Linie wpływu wielkości statycznych w ustrojach prętowych
J Ledziński Mechanika budowli cz 2 Statyka prętowych układów statycznie niewyznaczalnych
04 Linie wpływu wielkości statycznych w ustrojach prętowych 2
Podstawowe metody badań układu oddechowego
Kratownica trzykrotnie statycznie niewyznaczalna
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
Metodyka rozwiązywania zadań, Transport Politechnika, Semestr 1, Fizyka
więcej podobnych podstron