Zagadnienia teoretyczne:
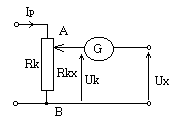
Pomiar metodą kompensacyjną polega na zrównoważeniu wartości mierzonej wartością znaną. Porównywalne są ze sobą dwa napięcia lub siła elektromotoryczna z napięciem. Zasadę pomiaru przedstawiono na rys. Napięciu mierzonemu Ux przeciwstawiony jest spadek napięcia między punktami AB. Napięcie to można regulować i wyznaczyć jego wartość. W chwili zrównania się napięcia Uk z napięciem Ux galwanometr wskaże wychylenie równe zero. Układ jest wtedy w stanie kompensacji i nie pobiera prądu z obiektu mierzonego. Jest to ważna zaleta metody kompensacyjnej. Napięcie Ux można skompensować napięciem Uk dwoma sposobami:
regulując prąd Ip przy zachowaniu stałej rezystancji Rkx;
zmieniając rezystancję Rkx przy zachowaniu stałej wartości prądu Ip.
Przebieg ćwiczenia:
Schemat układu do wyznaczenia charakterystyki obciążenia (prądowo-napięciowej) zasilacza stabilizowanego napięciowo o Uz = 5 V. Prąd 2 A.
Pomiary charakterystyki obciążenia (prąd.-nap.) zasilacza, zmieniając prąd rezystorem nastawnym w zakresie od 50 do 150 działek.
Obliczenie rezystancji wewnętrznej Rw źródła dla I1 = 500.0mA i I2 = 1500.0mA i odpowiednio U1 i U2 oraz niepewność względną <δRw> i bezwzględną <ΔRw> rezystancji wewnętrznej.
Metoda częściowej kompensacji.
[mA] |
50.0 |
60.0 |
70.0 |
80.0 |
90.0 |
100.0 |
110.0 |
120.0 |
130.0 |
140.0 |
150.0 |
[V] |
4.987 |
4.984 |
4.980 |
4.977 |
4.973 |
4.970 |
4.966 |
4.962 |
4.958 |
4.955 |
4.950 |
U2=4.950 V U1=4.987 V I2=1500.0 mA I1=500.0 mA
<ΔU1>=0.05%·4.987+0.003=5.494·10-3V
<ΔU2>=0.05%·4.950+0.003=5.475·10-3V
<δU1>=1.102·10-3
<δU2>=1.106·10-3
<ΔI1>=0.2%·1.5=0.003A
<ΔI2>=0.2%·1.5=0.003A
<δI1>=0.006
<δI2>=0.002
<δ(U2-U1)> = 0.209
<δ(I2-I1)> = 0.009
<δ(Rw)> = |0.209|+|0.009| = 0.218
<ΔRw> = 0.008 Ω
Rw = (0.037±0.008)Ω
[mA] |
50.0 |
150.0 |
[mV] |
96.7 |
60.9 |
U2=96.7 mV U1=60.9 mV I2=1500.0 mA I1=500.0 mA
<ΔU1>=0.05%·60.9+0.03=60.45·10-3 mV
<ΔU2>=0.05%·96.7+0.03=78.35·10-3mV
<δU1>=0.993·10-3
<δU2>=0.810·10-3
<ΔI1>=0.2%·1.5=0.003A
<ΔI2>=0.2%·1.5=0.003A
<δI1>=0.006
<δI2>=0.002
<δ(U2-U1)> = 3.015·10-3
<δ(I2-I1)> = 0.009
<δ(Rw)> = |3.015·10-3|+|0.009| = 12.015·10-3
<ΔRw> = 0.430mΩ
Rw = (35.8±0.4)mΩ
Wnioski:
Przez zastosowanie metody częściowej kompensacji zwiększyliśmy dokładność pomiaru.
Wyszukiwarka
Podobne podstrony:
7c) Argas reflexus
7c analiza wskaźnikowa spółki erogaz
6082 PB 7C PERONY strona tytułowa UM
6082 PB 7C PERONY opis techniczny
Ćwiczenie 7C R
6082 PBW 7C OGRODZENIE Podgorska Kujawska (2)
5Analiza-7C, Materiały z Uniwersytetu Szczecińskiego i PS (ZUT)
past simple 7c
PWiK - Wykład 7c, Budownictwo S1, Semestr IV, PWiK, Wykłady, PWiK 1, Wykład 7
stres wyklad 7c
bioch biol 7c
6082 PBW 7C OGRODZENIE strona tytułowa (2)
7c czynności skoczka w przypadkach szczególnych
Leki przeciwwirusowe 7c [tryb zgodności]
7C
7c
7c) Argas reflexus
7c analiza wskaźnikowa spółki erogaz
więcej podobnych podstron