Wprowadzenie :
Układy regulacji nadążnej to rodzaj układów regulacji automatycznej , dla których wartość zadana regulowanej wielkości jest zmienna w czasie , przy czym w odróżnieniu od układów regulacji programowej zmiany te mają charakter przypadkowy ( niemożliwy do dokładnego przewidzenia). Zadaniem układu regulacji nadążnej jest odwzorować na wyjściu zmiany wartości zadanej. Tradycyjnie dla układów regulacji nadążnej , w których wielkością regulowaną jest położenie (liniowe lub kątowe) stosuje się nazwę serwomechanizmy.
W ćwiczeniu badane były właściwości statyczne i dynamiczne elementów układu oraz proces regulacji nadążnej na przykładzie układu regulacji zastosowanego w analogowym rejestratorze autokompensacyjnym.
Schemat pomiarowy:
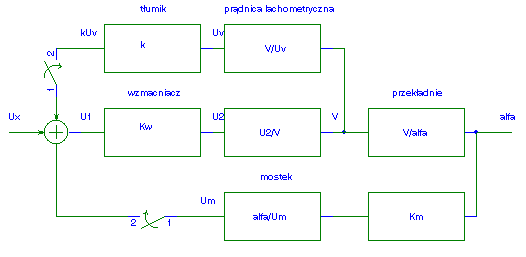
Zadaniem układu jest regulacja położenia α karetki w ślad za zmianami napięcia wejściowego UX . Napięcie wejściowe jest sumowane z napięciami sprzężenia zwrotnego od aktualnego położenia karetki (Um.) i od prędkości jej ruchu (UV) . Napięcie wynikowe U1 po wzmocnieniu zasila silnik prądu stałego napędzający (poprzez przekładnie) karetkę. W stanie równowagi Um.=UX , UV = 0, a zatem U1 = 0 i silnik nie zmienia położenia karetki.
Jest to układ z podwójnym sprzężeniem zwrotnym :
układ mostka rezystancyjnego z potencjometrem realizuje sprzężenie od wartości wielkości wyjściowej (α)
układ prądnicy tachometrycznej i tłumika realizują sprzężenie od prędkości zmian wielkości wyjściowej.
Prądnice za pomocą której prędkość ruchu karetki przetwarzana jest na napięcie UV można potraktować jako przetwornik śledzący dla prędkości (zerowego rządu) i opisać modelem :
UV = kV*V =kV dα/dt
Silnik napędzający karetkę poprzez zespół sprzężonych z nim przekładni mechanicznych można traktować jak element inercyjny pierwszego rzędu, ze względu na bezwładność masy wirującej oraz przesuwanej :
T dV(t)/dt + V(t) = ks*U2 gdzie : T - stała czasowa silnika
Ks - współczynnik wzm. stat.
Przekładnie mechaniczne przenoszą napęd z silnika na przesunięcie karetki. Stała prędkość obrotowa silnika przetworzona jest na stałą prędkość liniową karetki , a to oznacza liniowo zmieniające się położenie karetki. Przekładnie można zatem traktować jako układ całkujący :
Wyznaczanie transmitancji dla danego układu:
kW(s) - transmitancja wzmocnienia wzmacniacza
kS(s) - transmitancja silnika = ks/(1+sT)
kprze(s) - transmitancja przekładni = kprze/s
km.(s) - transmitancja mostka
k(s) - transmitancja tłumika
kV(s) - transmitancja prądnicy
Po uproszczeniu schematu blokowego badanego układu otrzymujemy transmitancję zastępczą :
Układ tej regulacji to obiekt drugiego rzędu, co dowodzi wyliczona powyżej transmitancja zastępcza.
Przebieg ćwiczenia :
Otwarte obie pętle sprzężeń :
Napięcie UX - stałe
Wzmocnienie kW - zmienne : 1 - 0,6 - 0,2
Zamknięta pętla sprzężenia α
Kw = 1
Km - zmienne : 0,2 - 0,4 - 0,6
Zamknięta pętla sprzężenia od prędkości zmian wielkości wyjściowej
kW = 1
km = 0,6
kV - zmienne : 0,4 - 0,6 - 1
Wzmocnienie km na granicy stanu nieustalonego (przy większej amplitudzie UX )
Kw = 1
Kv = 0,6
Km.= 0,6
Wszystkie wzmocnienia k = 1
Wnioski.
Regulacja nadążna
3
Wyszukiwarka
Podobne podstrony:
Regulacja nadążna 3
Regulacja nadążna
Regulacja nadążna 1
regulacja nadążna R
regulacja nadazna wykresy
regulacja nadazna poprawka
regulacja nadazna
Badanie regulacji nadążnej DOC
regulacja nadazna
regulacja nadążna R
Genetyka regulacja funkcji genow
REGULACJA UKLADU KRAZENIA 2
33 Przebieg i regulacja procesu translacji
8 ocena jakości układów regulacji
WYKŁAD 11 SPS 2 regulatory 0
więcej podobnych podstron