1.Narysować ogólny schemat układu automatyki, nazwać elementy i sygnały.
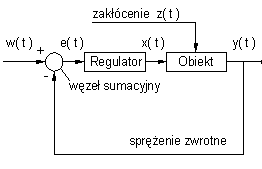
W układzie tym sygnał zadany w(t) porównywany jest na wejściu regulatora sygnałem regulowanym y(t). Różnica tych sygnałów e(t), nazywana uchybem lub błędem regulacji, jest wprowadzana do regulatora. Na podstawie wartości sygnału błędu e(t), regulator wytwarza odpowiedni sygnał sterujący x(t), nazywany też sygnałem nastawczym, tak aby wartość błędu była możliwie bliska zeru. Układ składa się z trzech części - są to: układ różnicowy (węzeł sumujący), regulator i obiekt regulacji. W praktyce części tych może być więcej. W automatyce wszystkie części , które wchodzą w skład układu automatycznej regulacji, nazywa się elementami.
2. Na czym polega różnica pomiędzy otwartym układem sterowania, a układem regulacji automatycznej (układem automatyki).
Sterowanie w układzie otwartym jest to układ w którym wymagana jest obecności człowieka. Człowiek uczestniczący w tym procesie musi mieć tak zwany wzorzec, z którego stale będzie porównywał sygnał Wy.- musi oddziaływać na obiekt poprzez urządzenie sterujące tak aby sygnał Wy y był prawidłowy, czyli musi kompensować zakłócenia.
Sterowanie w ukł. zamkniętym - jest to układ posiadający sprzężeniem zwrotnym. Działanie takiego układu sprowadza się do tego, że gdy następuje zmian sygnału WY, którego wartość dąży do zrównania z wielkością zadaną, to przez sprzężenie zwrotne układ jest w stanie sam skompensować zakłócenia i powrócić do stanu równowagi.
Różnicą jest obecność pętli sprzężenia zwrotnego. Transmitancja operatorowa ukł zamkniętego jest podstawą do badania stabilności układu otwartego.
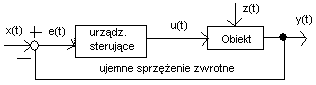
3. Na podstawie schematu wyjaśnić co to jest sprzężenie zwrotne i jak jest ono wykorzystywane w układzie automatyki?
Idea sprzężenia zwrotnego polega na tym, że sygnał WY układu jest kierowany z powrotem na wejście. Daje to możliwość kontrolowania wyjścia i oddziaływania na wejście w zależności co dzieje się na wyjściu. Następuje porównanie sygnału We i Wy, a różnica tych sygnałów stanowi sygnał uchybu e(t) przetwarzany przez urządzenie sterujące na sygnał sterujący u(t) o takiej wartości , aby sprowadzić sygnał uchybu e(t) do zera.
4. Jakie dodatkowe (w porównaniu z klasycznym, analogowym ukł automatyki)elementy występują na schemacie cyfrowego ukł. automatyki i jakie są ich zadania?
A/C - przetwornik analogowo-cyfrowy, próbkuje sygnał analogowy ( odczytuje tylko w określonych chwilach). Sygnał musi odpowiadać podziałowi na odpowiednią ilość części.
C/A - przetwornik analogowo cyfrowy, z ciągu impulsów odzyskuje sygnał analogowy.
5. Jaki jest cel wprowadzania w maszynach i urządzeniach technicznych układów automatyki.
1)zastępują człowieka
2)zastępują człowieka w sytuacjach kiedy sterowanie ręczne nie jest możliwe
Układy automatyki to zespoły elementów które biorą bezpośredni udział w sterowaniu automatycznym danego procesu oraz elementów pomocniczych, uporządkowanych na zasadzie ich wzajemnej współpracy, tzn. zgodnie z kierunkiem przekazywania sygnałów. Układ automatyki jest wprowadzany w maszyny i urządzania techniczne w celu ich funkcjonowania przez wzgląd na jego 2 podst. rodzaje sterowania automatycznego:
a) sterowanie w układzie otwartym,
b) sterowanie w układzie zamkniętym.
6. Jaki układ autom. nazywamy ukł. liniowym i jego najważniejsze cechy?
Układy liniowe - układy, które zawierają wyłącznie elementy liniowe, tzn. elementy o prostoliniowych charakterystykach statycznych. Elementy i układy liniowe spełniają zasadę superpozycji, tzn. odpowiedź na wymuszenie. Zasada superpozycji jeżeli na układ działa wiele wymuszeń jednocześnie to odpowiedź układu stanowi sumę odpowiedzi na każde z wymuszeń rozpatrywanych oddzielnie (przy założeniu, że pozostałe nie oddziałują).
7. Jaki układ nazywamy układem regulacji stałowartościowej (stabilizującej) - przykład? - Sygnał wejściowy w(t) ma stałą wartość (w(t)=const) , czyli w procesie regulacji układ ma za zadanie utrzymać stałą wartość wielkości wyjściowej , mimo działających zakłóceń Przykładem układu stabilizacji jest układ regulacji poziomu cieczy w zbiorniku.
8. Jaki układ nazywamy układem regulacji programowej - przykład?- Są to układy regulacji programowej /zamknięte/ i układy sterowania programowego /otwarte/, w których sygnał wejściowy jest określoną funkcją czasu. Układy te są przypadkiem układów śledzących. Program regulacji może być wprowadzony przez urządzenia krzywkowe, a zadaniem układu jest odwzorowanie go na wyjściu układu, np. układ programowej regulacji temperatury w piecach hutniczych.
9. Jaki układ nazywamy układem nadążnym regulacji - przykład? - Są to zamknięte układy sterowania /serwomechanizmami/ , w których sygnał wejściowy w(t) jest nieznaną funkcją czasu. Zadaniem układu jest spowodowanie nadążania wielkości wyjściowej za zmianami wielkości wejściowej Przykładem układu śledzącego jest układ sterowania ogniem artylerii przeciwlotniczej według wskazań radaru.(np. Działa wojskowe)
11.Podaj definicje transmitancji operatorowej G(s) elementu lub układu automatyki nazywamy oraz wyznaczyć transmitancję dla układu opisanego równaniem : stosunek transformaty wielkości wyjściowej y(s) do transformaty wielkości wejściowej x(s) przy zerowych warunkach początkowych. G(s)=y(s)/x(s)
12. Co nazywamy charakterystyką statyczną elementu lub układu automatyki? Wyznaczyć równanie charakterystyki statycznej dla układu opisanego równaniem: -przedstawia zależność wielkości wyjściowej do wielkości wejściowej w stanie ustalonym.
13. Podać algorytm wyznaczania odpowiedzi elementu lub układu automatyki o danej transmitancji operatorowej na zakłócenia dane przebiegiem czasowym
- na sygnał skokowy
X(t)=1(t) x(s)=1/s
Y(s)=G(s)*x(s)
Y(s)=G(s)*1/s
Y(t)= L -1(G(s)*1/s)=k(t)
- na sygnał impulsowy
x(t)=δ)(t) x(s)=1
Y(s)=G(s)*1
Y(t)= L-1(G(s))=g(t)
14. W jaki sposób wyznacza się zastępcze transmitancje dla połączeń: szeregowego i ze sprzężeniem zwrotnym?
szeregowe Gz=G1*G2*G3*...*Gn
sprzężenie zwrotne :
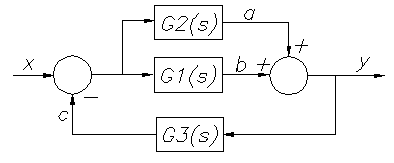
15. W jaki sposób wyznacza się zastępcze transmitancje dla połączeń: równoległego i ze sprzężeniem zwrotnym?
równoległe :
Gz=G1+-G2+-G3+-...*Gn
sprzężenie zwrotne :
16.Ile wynosi wzmocnienie układu składającego się z elementów proporcjonalnych połączonych w następujący sposób: (tu prosty schemat blokowy zawierający połączenia szeregowe, równoległe i ze sprzężeniem zwrotnym)?
17.Na podstawie ogólnego schematu układu regulacji automatycznej lub przykładu UAR wyjaśnić, co rozumiemy pod pojęciem "uchyb" oraz "regulator".
Uchyb - różnica wartości sygnału wejściowego (zadanego) i wyjściowego (regulowanego) e(t)=x(t)-y(t)
Regulator - urządzenie sterujące które przetwarza wartość uchybu na sygnał sterujący obiektem w taki sposób aby wartość błędu ,uchybu sprowadzić możliwie do zera.
18. Jakie są zadania regulatora w układzie automatyki ?
Regulator wykonuje podstawową funkcje układu automatycznej regulacji. Przetwarza on bowiem sygnał błędu e(t) na odpowiedni sygnał, konieczny do wysterowania obiektu w sposób zapewniający przebieg procesu zgodny z przebiegiem pożądanym
lub doprowadzenie i utrzymywanie wartości sygnału wyjściowego równej sygnałowi zadanemu w określonym czasie, pośrednio sprowadzenie wartości uchybu do zera.
19. Jakie są zadania regulatora w układzie automatyki ?
-służy do doprowadzenia obiektu do żądanego stanu (minimalizuje uchyb)
-przetwarza sygnał błędu na odpowiedni sygnał aby zapewnić pożądany przebieg
20. Podać transmitancję regulatora PID, określić jakie operacje wykonuje on na sygnale wejściowym i jaki to sygnał oraz wskazać jego parametry związane z poszczególnymi akcjami
Regulator PID - reguluje działanie:
- proporcjonalne P
- całkujące I
- Różniczkujące D
Transmitancja operatorowa regulatora PID
Idealnego: G(s)PID=kp+1/(Ti*s) +Td*s
Rzeczywistego: G(s)PID=kp +1/(Ti*s) +Td*s/(T*s+1)
kp - współ. Wzmocnienia regulatora; Ti-stała czasowa całkująca; Td- stała czasowa różniczkowania T-stała czasowa
Właściwy dobór nastaw pozwala otrzymać żądaną wartość:
-statycznego błędu regulacji
-przeregulowania Cur
-czas regulacji Trr
Regulator P - nie eliminuje błędu statycznego, który zależy od wielkości wzmocnienia. Ta wielkość wpływa również na szybkość działanie oraz amplitudę sygnały WY, wzrost kp oznacza skrócenie czasu regulacji i wzrost amplitudy przebiegu wyjściowego
Regulator I - wyłącznie akcja całkująca; reaguje na wszelkie odchyłki sygnału regulowanego. Likwiduje do 0 błąd statyczny regulacji. Czas regulacji ulega wydłużeniu - zwiększenie wzmocnienia.
Regulator D - reaguje na każdą zmianę sygnału regulowanego , skraca czas regulacji, zmniejsza przeregulowanie.
Potrzebna jest charakterystyka obiektu i regulatora:
P: kp=0.5 kpkr
PI: kp=0.45 kpkr ; Ti= 0.85 Tosc
PID: kp=0.6 kpkr ; Ti = 0.5 Tosc , Td = 0,12 Tosc
21. Na podstawie transmitancji regulatora PID wyjaśnić w jaki sposób dysponując regulatorem PID możemy sprawić aby działał on jak regulator P
Transmitancja operatorowa regulatora PID
Idealnego: G(s)PID=kp+1/(Ti*s) +Td*s
Rzeczywistego: G(s)PID=kp +1/(Ti*s) +Td*s/(T*s+1)
W wyniku zastosowania w regulatorze PID wyłącznie akcji proporcjonalnej otrzymamy regulator P.
22. Co nazywamy charakterystyką amplitudowo-fazową elementu lub układu automatyki i w jaki sposób możemy określić wzmocnienie i przesunięcie fazowe dla danej wartości pulsacji?
Charakterystyką amplitudowo-fazową nazywamy graficzne przedstawienie (wykres) transmitancji widmowej układu.
Moduł transmitancji widmowej określa wzmocnienie, a
określa kąt przesunięcia.
23. Dla częstości sygnału wejściowego równej 2 wzmocnienie układu wynosi 5, a przesunięcie fazowe -π/4. Jeśli sygnał wejściowy określony jest zależnością x(t)= 4 sin 2t, to jaką zależnością będzie określony sygnał wyjściowy po dostatecznie długim czasie? Uzasadnić.
24. Jakie charakterystyki częstotliwościowe elementu lub układu automatyki nazywamy charakterystykami logarytmicznymi i do czego są one wykorzystywane?
Zależność argumentu transmitancji widmowej
wykreślona w logarytmicznej skali pulsacji
nazywa się charakterystyką logarytmiczną fazową, a zależność
wykreślona w logarytmicznej skali pulsacji
nazywa się logarytmiczną charakterystyką amplitudową.
Charakterystyki logarytmiczne (amplitudowe i fazowe) są to graficzne przedstawienia zależności wzmocnienia i przesunięcia fazowego układu do pulsacji na skalach logarytmicznych.
Mogą służyć do wyznaczenia pasma przenoszenia, określenia stabilności (kryterium Nyquista) zapasu amplitud i faz.
25.Sposób wyznaczania częstotliwościowych charakterystyk logarytmicznych układu elementów połączonych szeregowo.
Sposób wyznaczania częstotliwościowych ch-k logarytmicznych układów połączonych szeregowo polega na algebraicznym dodaniu charakterystyk poszczególnych elementów co wynika z transmitancji zastępczej elementów połączonych szeregowo oraz własności logarytmów:
ln(a*b)=lna+lnb
Potem na podstawie transmitancji widmowej należy wyznaczyć
Ze wzorów:
26. Co rozumiemy pod pojęciem stabilność układu i dlaczego stabilność tego układu decyduje o jego przydatności?
Stabilność jest cechą układu, która polega na powracaniu do stanu równowagi stałej po ustaniu działania zakłócenia, które wytrąciło układ z tego stanu. Układ jest stabilny, gdy po ustaniu zakłóceń, które spowodowało wytrącenie go z równowagi, powraca ponownie do stanu ustalonego. Stabilność jest bardzo wazna własnością aby układ mógł bezpiecznie pracować.
Rozpatrując pierwiastki równania charakterystyki i ich wpływ na czynnik e st przy t →∞ można stwierdzić, że dla układu stabilnego pierwiastki leżą w lewej półpłaszczyźnie płaszczyzny pierwiastków (liczb zespolonych), stąd kryterium stabilności.
Układ regulacji automatycznej jest stabilny jeżeli wszystkie pierwiastki równania charakterystyki leżą w lewej półpłaszczyźnie płaszczyzny pierwiastków. Ze względu na trudność obliczenia pierwiastków równania wyższego stopnia niż drugi stosuje się metody pozwalające stwierdzić czy pierwiastki równania charakterystyki znajdują się w lewej półpłaszczyźnie bez konieczności rozwiązywania równań charakterystyki. Są to kryteria Hurwitza, Nygnista.
27. Włączamy układ stabilizacji temp. z regulatorem PID. Jak będzie się zmieniać uchyb w tym układzie, jeśli ukł. będzie: a)stabilny, b)niestabilny?
Stabilność jest cechą układu, która polega na powracaniu do stanu równowagi stałej po ustaniu działania zakłócenia, które wytrąciło układ z tego stanu. Niekiedy precyzuje się dodatkowo, że gdy po zniknięciu zakłócenia układ powraca do tego samego stanu równowagi co zajmowany poprzednio, wówczas jest stabilny asymptotycznie. Koniecznym i dostatecznym warunkiem stabilności asymptotycznej układu jest, aby pierwiastki równania charakterystycznego układu zamkniętego miały ujemne części rzeczywiste: Re(sk) < 0. Jeżeli chociaż jeden z pierwiastków równania ma część rzeczywistą dodatnią: Re(sk) > 0 to układ jest niestabilny. Jeżeli pierwiastki zerowe są wielokrotne, to przebieg y(t) oddala się od początkowego stanu równowagi, układ jest niestabilny
a) stabilny- uchyb maleje b)niestabilny- uchyb rośnie
28.Ogólny warunek stabilności ( na prostym przykładzie).
Ogólny warunek stabilności mówi, że jeżeli bieguny automatyki (miejsca zerowe) są ujemne lub mają ujemne części rzeczywiste to układ jest stabilny asymptotycznie, czyli posiada zdolność powrotu do stanu równowagi, z którego został wytrącony.
Jeżeli układ posiada biegun równy zero lub parę części urojonych to układ jest stabilny nieasymptotycznie. Układ ten jest na granicy stabilności.
Jeżeli układ posiada dodatnie części rzeczywiste układ jest niestabilny. Niewielka zmiana parametrów układu spowoduje niestabilność układu.
29.Kryterium Hurwitza (prosty przykład zastosowania)
Aby wszystkie pierwiastki równania charakterystycznego
leżały w miały ujemne części rzeczywiste muszą być spełnione dwa warunki:
1. Wszystkie współczynniki a1 dla i=0..n są różne od zera i są tego samego znaku,
2. Wszystkie minory główne wyznacznika Hurwitza są dodatnie
Wyznacznik Hurwitza H ma n wierszy i n kolumn
Minor skrajny
nie musi być sprawdzany ponieważ był już sprawdzony, a przy parzystym nN znak minora
i też wynika z uprzednio sprawdzonych zależności.
Uproszczeniem w obliczeniach jest występowanie dużej ilości zer w wyznaczniku Hurwitza. Niedogodnością tej metody są trudności w oszacowaniu wpływu zmian parametrów układu na ryzyko utraty stabilności.
30. Jakie wielkości wykorzystuje się do oceny jakości regulacji na podstawie przebiegów czasowych ?
- błąd (odchyłka) statystyczna -jest to różnica pomiędzy wartością zadaną a wartością wyjściową w stanie ustalonym;
-przeregulowanie - jest to maksymalne odchylenie odpowiedzi układu od wartości w stanie ustalonym tej odpowiedzi; przekroczenie zadanej wartości dopuszczalnej.
- czas regulacji - nazywamy czas liczony od chwili przyłożenia wymuszenia do chwili, po której odchylenie regulacji jest stale mniejsze od dopuszczalnych granic
31. Na podstawie przykładowego przebiegu uchybu wyjaśnić, co nazywamy przeregulowaniem i czasem regulacji?
Przeregulowanie χ definiuje się wzorem
Gdzie em - to odchylenie maksymalne regulacji
Im silniej tłumione są przebiegi oscylacyjne, tym mniejsza jest wartość przeregulowania. Przeregulowanie rośnie w miarę zbliżania się do granicy stabilności, aby osiągnąć 100% na tej granicy.
Czas regulacji - nazywamy czas liniowy od chwili przyłożenia wymuszenia do chwili, po której odchylenie regulacji jest stałe, mniejsze od dopuszczalnych granic De. Niekiedy czas regulacji definiuje się jako czas trwania przebiegu przejściowego, tzn. przyjmuje się, że układ wytrącony z równowagi przez zakłócenie zewnętrzne osiągnie ponownie stan ustalony po czasie tr.
Czas regulacji-(Trr)minimalny czas po którym wielkość regulowana znajdzie się w przedziale
Przeregulowanie (Crr)-przekroczenie zadanej wartości dopuszczalnej lub inaczej różnica miedzy Największą wartością a tą koło której są oscylacje
32.W ukł regulacji temperatury wartość zadana wynosiła 520K, zaś ustalona wartość temp wyniosła 500K. Czy wystąpiła tu odchyłka statyczna jeśli tak to ile ona wynosi?
Wartość zadana jest to wartość temperatury, na którą ustawione jest sterowanie zespołu.
Odchyłka statyczna wystąpiła i wynosiła 3,85%
33. Na czym polega ocena jakości układu automatyki z wykorzystaniem kryteriów całkowych?
Jakość dynamiczną układ regulacji oceniać można na podstawie wielkości pola regulacji, tzn. pola zawartego pomiędzy krzywą regulacji i asymptotą do której dąży ta krzywa.
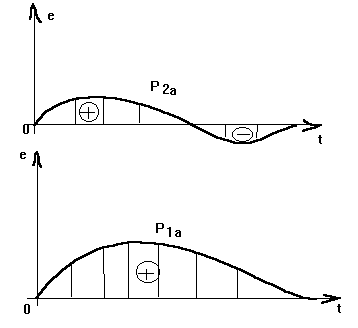
Im mniejsze jest pole, tym lepsza jakość dynamiczna układu. Podejście takie ma również interpretację ekonomiczną, gdyż częste straty są prostą funkcja wielkości i czasu trwania odchylenia regulacji, a celem sterowania jest minimalizacja tych strat. Zależnie od rodzaju układu i spodziewanego charakteru przebiegów przejściowych, oblicza się jeden z następujących wskaźników:
a) dla przebiegów aperiodycznych, w których:
b) dla przebiegów oscylacyjnych, w których:
Wskaźnik:
I1a - reprezentuje zakreskowane pola,
I2a - kwadrat rzędnych tego pola.
W przypadku typowych układów regulacji istnieje przybliżona odpowiedniość pomiędzy wskaźnikami dotyczącymi cech odpowiedzi skokowej a całkowymi wskaźnikami jakości.
34.Na czym polega dobór parametrów regulatora na podstawie kryteriów całkowych? Całkowe wskaźniki jakości są wygodnym narzędziem do porównywania miedzy sobą UAR o podobnej strukturze i doboru parametrów w tych układach. Są stosowane do oceny wpływu wielkości zadanej na pracę układu do badania wpływu zakłóceń.
Akcja P- powoduje zmniejszenie uchybu statycznego, daje odporność układu regulacji na zakłócenia
Akcja I - służy do poprawy dokładności statycznej, wydłużenie czasu regulacji, zmniejszenie ew/ey
Akcja D-skrócenie czasu regulacji, poprawienie stabilności układu
35.Na czym polega dobór parametrów regulatora metody Zieglera-Nicholsa?
Dobór nastaw regulatorów wymaga czynności:
1)nastawienia regulatora tylko na działanie P (Ti=Ti max, Td=Tdmin)
2)zwiększenie kP Az do pojawienia się oscylacji wielkości regulowanej.
Na podstawie ustalonego kPkri Tosc można wyznaczyć wartość nastawy dla poszczególnych regulatorów z zależności:
P:kP=0.5kpkr
P1:kp=0,45 kpkr ; Ti=0,85 TOSC
PID:TP=0,6 kPKR ; Ti=0,5, T=0.12 TOSC
36. Jaki element pełni rolę regulatora w układzie regulacji dwustawnej i na czym polega jego działanie?
Układ regulacji dwustawnej to taki układ, w którym regulator może nastawać tylko dwie wielkości sterujące obiektem regulacji. W układach regulacji dwustawnej zadanie regulatora spełnia przekaźnik dwupołożeniowy. W przypadku zastosowania do regulacji temperatury działanie można opisać następująco: jeżeli temperatura obiektu jest mniejsza od zadanej (y<y0), to regulator załącza obwód grzejny, a jeżeli (y>y0) to regulator wyłącza obwód grzejny. stosować regulatory dwu położeniowe stosuje się gdy obiekty regulacji maja własności elementów inercyjnych lub całkujących o dużej stałej czasowej, a urządzenie wykonawcze ma działanie dwustanowe. Charakterystyki regulatora:
37. Jak możemy rozpoznać na podstawie przebiegu wielkości regulowanej w stanie quasi ustalonym, że w układzie regulacji, np. temperatury zastosowano regulator dwupołożeniowy a nie np. regulator PID?
Przebieg wielkości regulowanej w stanie quasi ustalonym dla regulatora dwustawnego jest periodyczny (okresowy), natomiast dla regulatora PID dąży do wartości zadanej.
38. W układzie regulacji dwustawnej temperatury obiektem jest element inercyjny I rzędu, zaś przekaźnik ma histerezę o szerokości +/-20oC. Ile wyniesie amplituda oscylacji ustalonych? Uzasadnić
39. W jaki sposób można zmniejszyć amplitudę drgań ustalonych wielkości regulowanej w układzie regulacji dwustawnej z regulatorem z histerezą i jak wówczas zmieniać się będzie częstotliwość przełączeń przekaźnika?
Zmniejszenie amplitudy można uzyskać dzięki zastosowaniu regulatora z sprzeżeniem zwrotnym. Stała czasowa T w sprzężeniu zwrotnym powinna być znacznie mniejsza od zastępczej stałej czasowej obiektu. Po zastos. pojedynczego sprzężenia zwrotnego wzrasta częstotliwość oscylacji, maleje amplituda wahań ,występuje różnica między wartością średnią yśr a zadana yz. Odchyłkę te można zmniejszyć stosując drugie sprzęż. zwr. Regulator dwustawny z pojedynczym sprzężeniem zwr. ma własności zbliżone do regulatora PD a z podwójnym do regulatora PID.
4
Wyszukiwarka
Podobne podstrony:
Egz Automatyzacja mini
testy egz V r (Automatycznie zapisany)
Automatyka i Robotyka EGZ dla EIP
Podstawy automatyzacji ZiP egz, szkoła PŚK, Automatyzacja, Podstawy Automatyzacji
sprężarki automatyka, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty
tematy do egzaminu tmm, Automatyka i Robotyka studia, 2rok, Teoria mech i masz, Ćwiczenia + egzamin,
Test egz PiUSpajania 42, Mechatronika, Semestr VI, Automatyzacja procesów spawalniczych
Automatyka egz, Technologia Żywności, Automaty, Ćwiczenia
Automatyka i Robotyka EGZ
Automatyka i Robotyka EGZ
Automatyka i Robotyka EGZ dla EIP
pompy automatyka, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, Af
,podstawy teorii automatów, pytania na egz
Automatyka i Robotyka EGZ
automaty siciga na egz 180
więcej podobnych podstron