6. DYNAMIKA RUCHU SAMOCHODU
6.1. Równanie ruchu samochodu
Weźmy ogólny przypadek jazdy pod górę ze zmienną prędkością. Samochód o ciężarze G jedzie pod kątem
z prędkością
. Działa na niego opór powietrza
i siła oporu bezwładności
(w środku ciężkości S). Nawierzchnia działa na koła samochodu reakcjami pionowymi
i
. Przyjmujemy, że napędzana jest oś tylna, a przednia oś toczona. Zatem odpowiednio nazywamy reakcje poziome nawierzchni
i
.
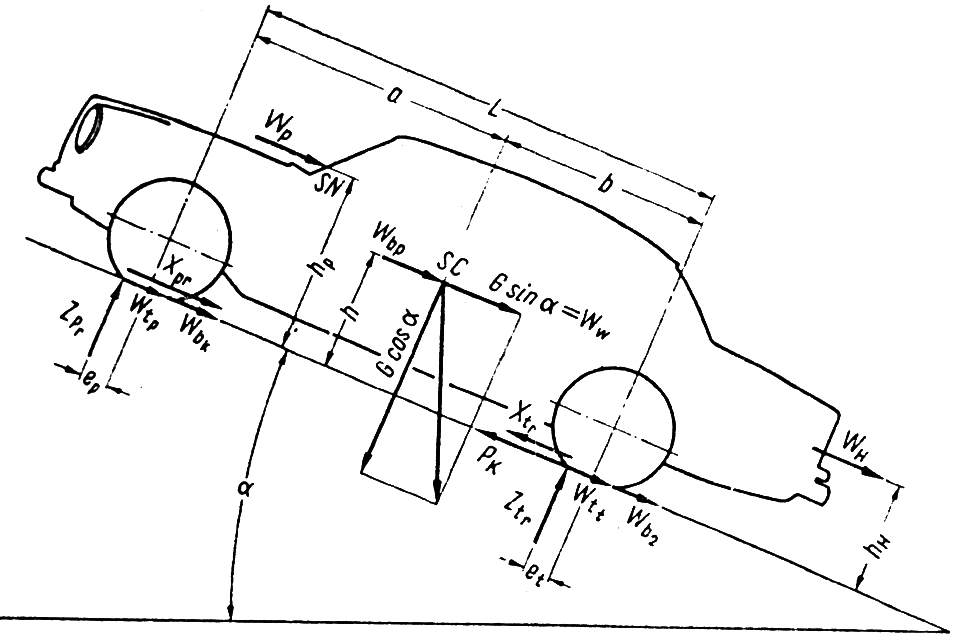
Rys. 32. Siły zewnętrzne działające na samochód będący w ruchu.
Porównując siły w kierunku jazdy piszemy
gdzie
Dla kół toczonych zapisujemy (wg równania równowagi
koła toczone)
Dla kół napędzanych (wg równania równowagi koła napędzanego przy przyspieszaniu)
gdzie
- siła napędowa na kołach napędzanych
- siła oporu bezwładności układu napędowego i kół napędzanych.
Podstawiając do równania , otrzymamy
Uwzględniając zależności
otrzymujemy
gdzie
- opór drogowy
- opór bezwładności
Ponieważ
i
to równanie ruchu samochodu bez przyczepy przyjmuje postać:
.
Siła napędowa
Siła napędowa jest to siła obwodowa działająca na promieniu dynamicznym koła, która równoważy siły wszystkich oporów ruchu samochodu. Siłą napędową
należy rozumieć jako sumę momentów na kołach podzielonych przez promień koła
.
Znaczenie sumy momentów na kołach
można wyjaśnić na przykładzie dwuosiowego samochodu, który ma napędzaną tylko jedną oś. Przy napędzie (pomijamy tarcie w łożyskach kół):
- dla osi napędzanej
, dla osi nienapędzanej
.
Jeżeli samochód jest hamowany przez układ napędowy to:
- dla osi napędzanej
, dla osi nienapędzanej
;.
Natomiast jeżeli jest hamowany przez układ hamulcowy działający na wszystkie koła to:
- dla osi napędzanej
, dla osi nienapędzanej
.
6.2. Wykres trakcyjny samochodu
Jest to przedstawienie we współrzędnych
granicznych wartości możliwych do uzyskania sił napędowych i sił oporów ruchu w funkcji prędkości ruchu samochodu.
Konieczna jest znajomość prędkościowej charakterystyki eksploatacyjnej silnika samochodu
i
.
Zwykle jednostką momentu Ms jest Nm, mocy Ns - kW, ns - obr/min.
Siła obwodowa na kołach (siła napędowa)
zaś
Prędkość jazdy samochodu
czyli
przyjmując że
możemy obliczyć iloczyn
Zatem na wykresie punkty odpowiadające
będą leżały na hiperbolach równobocznych. Krzywe
sporządza się dla poszczególnych wybieralnych przełożeń w skrzyni biegów.
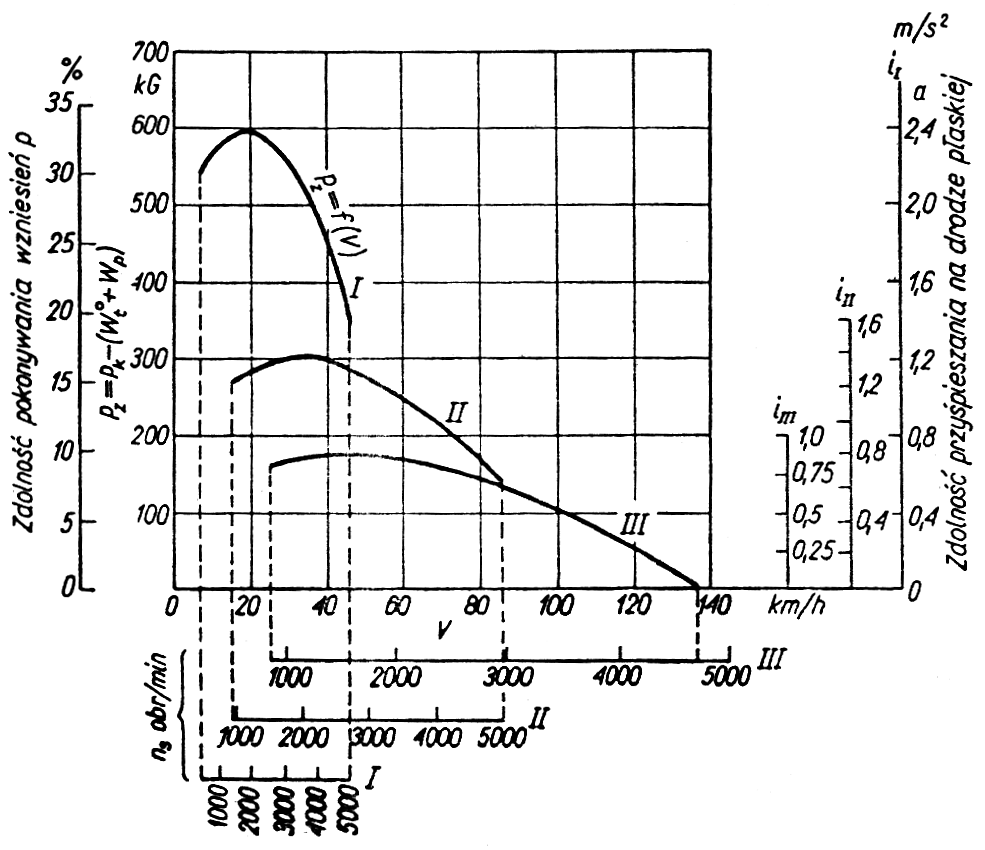
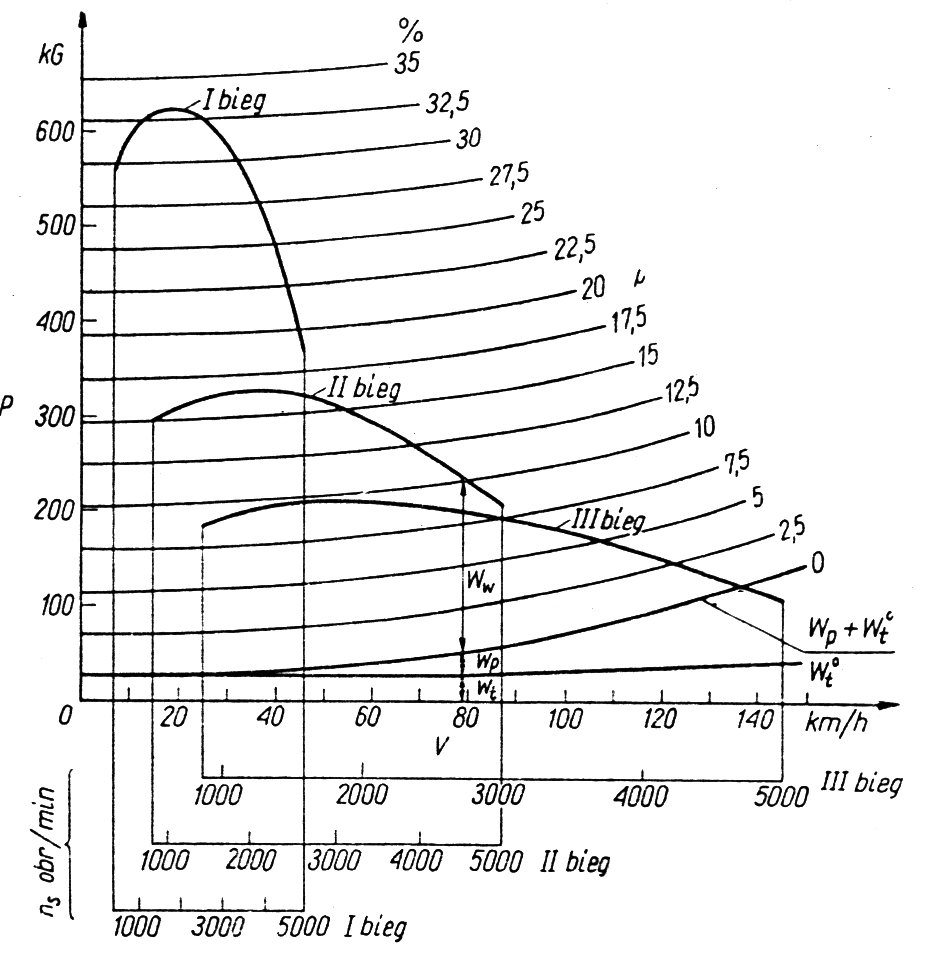
Rys. 33. Rozporządzalny zapas siły napędowej, zdolność pokonywania wzniesień i zdolność przyspieszania.
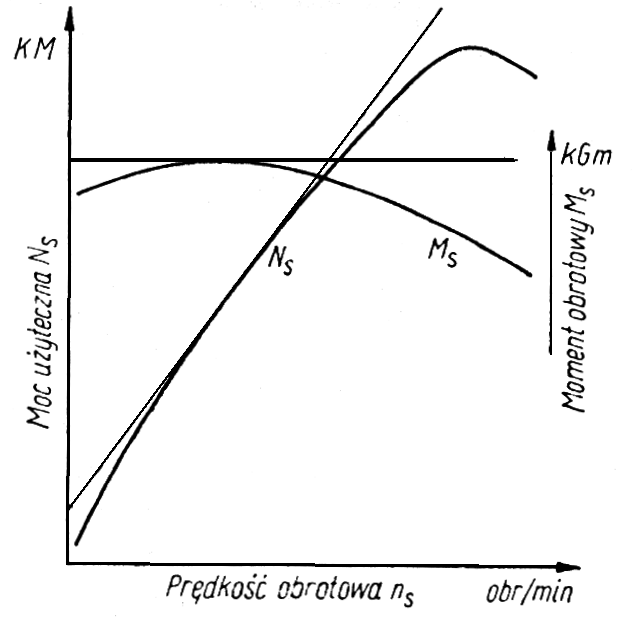
Rys. 34. Rzeczywista zależność mocy i momentu obrotowego silnika od jego prędkości obrotowej
Z wykresu charakterystyki silnika wyznacza się wartość
i
dla wybranej wartości prędkości obrotowej silnika
.
Oblicza się następnie wartości
i
na poszczególnych biegach
. Punkty
będą leżeć na hiperboli stałej mocy
przy prędkości
. Punkty
odpowiadające
przy zmianie przełożenia przesuwają się po hiperboli stałej mocy. Zmiana przełożenia
czyli zmiana biegu powoduje zmianę zakresu prędkości jazdy. Natomiast wartości sił
na poszczególnych biegach są proporcjonalne do przebiegu momentu obrotowego silnika
.
Sposób wykreślania wykresu trakcyjnego
Przyjmujemy wartości obrotów silnika
,Obliczamy moment silnika lub odczytujemy z wykresu,
Obliczamy
i
dla poszczególnych biegów np. wg tabeli:
Tabela.13.Tabela obliczeniowa.
|
ns |
1000 |
1200 |
... |
2000 |
... |
nmax |
iI |
Ms |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
FnI |
|
|
|
|
|
|
iII |
Ms |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
FnII |
|
|
|
|
|
|
Na wykres nanosimy krzywe
oporów powietrza
oporów drogowych - zależnie od kąta nachylenia drogi
.
Siły napędowe
dla biegów niższych będą większe i na wykresie znajdują się wyżej; te opory można pokonać tylko na biegu I i II.
Krzywe
wykreślone zostały dla pełnego zasilania, ale wykorzystywać można całe pole pod nimi. Nadmiar siły napędowej (pociągowej) oznaczany jest przez
. Może on być wykorzystany do pokonania odpowiednio dużego wzniesienia drogi lub na przyspieszenie samochodu.
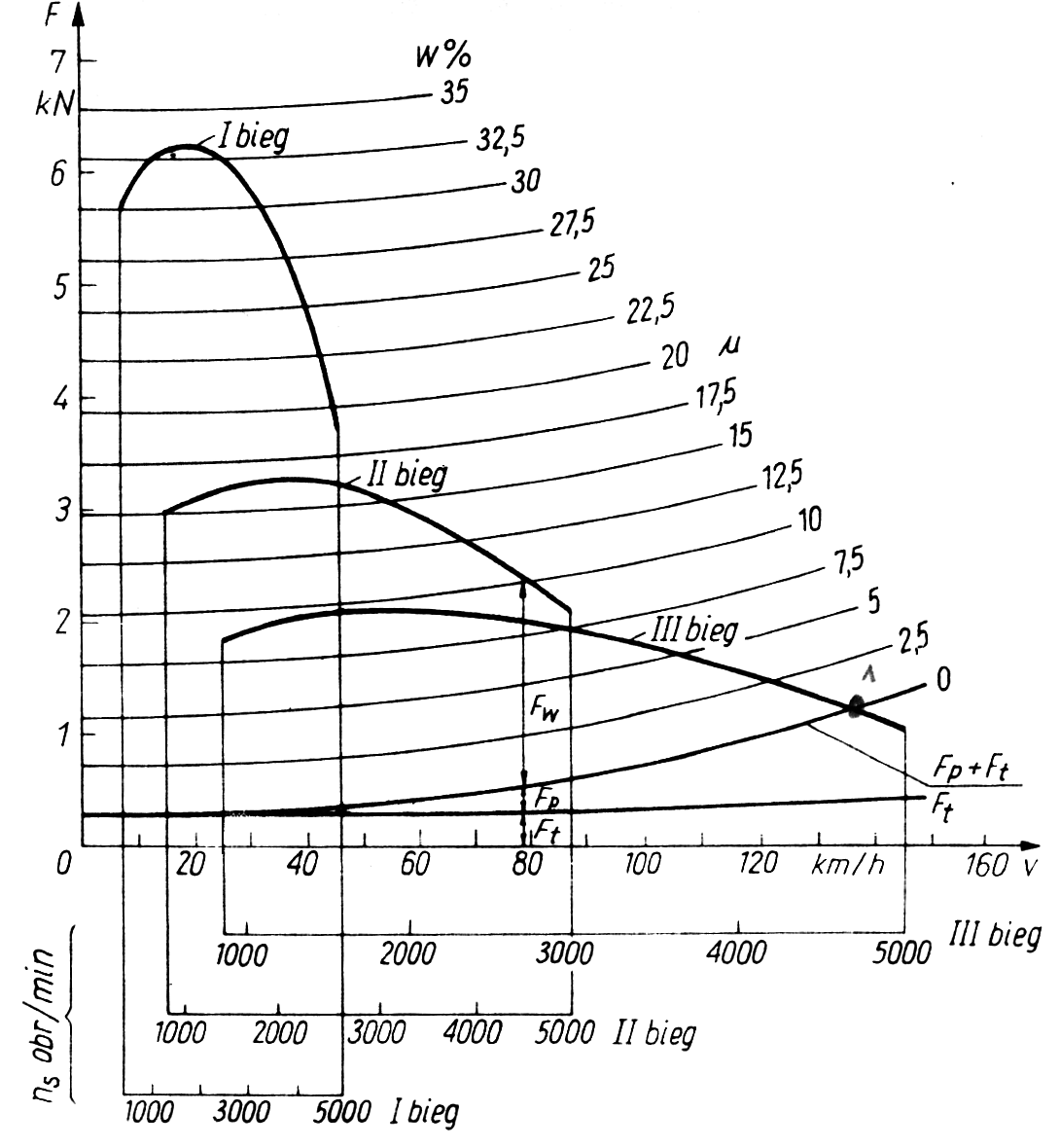
Rys. 35. Wykres trakcyjny samochodu osobowego z 3-stopniową
skrzynią biegów [3]
Na wykres można nanieść skalę w % lub w
do wyznaczania zdolności pokonywania wzniesień przez samochód oraz skalę
do wyznaczania zdolności przyspieszenia na drodze poziomej.
Szybkość maksymalna określana jest na określonym biegu przez punkt przecięcia się siły napędowej
i krzywej
(punkt 1).
6.3. Charakterystyka dynamiczna samochodu
Wykres charakterystyki dynamicznej to przedstawienie sił napędowych odniesionych do jednostki ciężaru samochodu. Jest bardziej przydatny do porównywania właściwości samochodów niż wykres trakcyjny. W równaniu ruchu składniki dzielimy przez ciężar samochodu G:
Siły te oznaczamy jako
gdzie:
Jednostkowa siła napędowa q równoważy sumę jednostkowych oporów ruchu
, przy czym
qt i qw - zależą od chwilowego obciążenia (od
i od
),
qb- też jest zależne od chwilowego obciążenia samochodu, zaś
qp- jest reprezentowane przez ustaloną krzywą niezależną od chwilowego obciążenia.
Można zatem wprowadzić siłę jednostkową D równą
zatem
D - współczynnik dynamiczny (wielkość bezwymiarowa) nazywany jest jednostkową siłą napędową pomniejszoną o jednostkowy opór powietrza; inaczej wolna siła jednostkowa na kołach.
Sposób wykreślania wykresu charakterystyki dynamicznej samochodu
Na podstawie charakterystyki silnika obliczamy V, i qI , ...., qN według tabelki
Tabela.14.Tabela obliczeniowa.
|
ns |
1000 |
1200 |
... |
2000 |
... |
nmax |
iI |
Ms |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
qnI |
|
|
|
|
|
|
|
DI |
|
|
|
|
|
|
iII |
Ms |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
qnII |
|
|
|
|
|
|
|
DII |
|
|
|
|
|
|
Następnie oblicza się wartości
V |
10 |
20 |
30 |
40 |
... |
qp |
|
|
|
|
|
Następnie oblicza się wartości D w tabelce lub można na wykresie wyznaczyć
graficznie.
Charakterystyka dynamiczna to wykres przedstawiający zależność współczynnika dynamicznego od prędkości jazdy na poszczególnych biegach. Krzywe q są podobne do krzywych momentu silnika i wierzchołki tych krzywych leżą na hiperbolach, lecz gdy od krzywych q odejmie się parabolę qp to krzywe D będą zdeformowane i ich wierzchołki nie tworzą hiperboli. W sumie jest to korzystne bo wierzchołki przesuwają się w lewo i mamy większy zakres prędkości do wykorzystania od wierzchołka do końca zakresu q.
Opór drogowy
przy ruchu jednostajnym jest przedstawiony bezpośrednio wartościami wskaźnika dynamicznego D. Ponieważ
to przy jeździe na drodze poziomej można określić wartość maksymalnego przyspieszenia jako
Analogicznie jak przy charakterystyce trakcyjnej można tu określać prędkość maksymalną jazdy Vmax, maksymalny opór wzniesienia czy maksymalne przyspieszenie.
Rys. 36. Wykres trakcyjny samochodu osobowego z 3-stopniową skrzynią biegów.
Dysponować można też powierzchnią pod krzywą zakreskowaną. Wykres uzupełniany jest krzywymi maksymalnej wartości D ze względu na warunki przyczepności.
gdzie:
- współczynnik obciążenia osi napędzanej w momencie utraty przyczepności.
Tabela .15. Wartości wskaźnika dynamicznego
|
Bieg najniższy |
Bieg najwyższy |
Samochody osobowe małe |
0,25÷0,30 |
0,08÷0,10 |
Samochody osobowe średnie i duże |
0,35÷0,50 |
0,12÷0,18 |
Autobusy dalekobieżne |
0,31÷0,40 |
0,05÷0,06 |
Autobusy miejskie |
0,30÷0,49 |
0,05÷0,07 |
Samochody ciężarowe mała ładowność |
0,35÷0,45 |
0,07÷0,10 |
Samochody ciężarowe średnie i dużej ładowności |
0,32÷0,40 |
0,05÷0,06 |
6.4. Ogólne równanie ruchu samochodu z przyczepą
Równanie ruchu samochodu bez przyczepy jest następujące:
Jeżeli uwzględni się opór przyczepy
to
Przyjmując, że
oraz wstawiając do równania i rozwiązując go względem
uzyska się
Równanie to jest ogólnym równaniem ruchu samochodu obciążonego siłą uciągu, jadącego po torze prostoliniowym. Można wprowadzić tu ogólny współczynnik mas zredukowanych
. Jeżeli połączenie samochodu z przyczepą jest sztywne to można napisać:
Podstawiając to do wzoru ogólnego otrzymamy równanie ruchu samochodu w postaci bezwymiarowej
gdzie
- wskaźnik dynamiczny zespołu samochód-przyczepa
Z tego równania po przyjęciu odpowiednich założeń można otrzymać równanie ruchu dla różnych przypadków np.
,
- brak przyczepy.
- wskaźnik dynamiczny samochodu.
Korzystając z tego równania można wyznaczyć różne charakterystyczne wielkości dynamiczne, kinematyczne czy eksploatacyjne samochodu. Na przykład, uwzględniając warunki w jakich pokonuje się maksymalne wzniesienia (jazda z małą i stałą prędkością)
Możliwe jest także wyznaczenie maksymalnego ciężaru przyczepy w oparciu o równanie ogólne. Największy ciężar przyczepy może być wtedy, gdy na kołach występuje największa siła napędowa i są najmniejsze opory ruchu
. Największa możliwa siła napędowa równa sile przyczepności, a ta może być największa, gdy napędzane są wszystkie koła samochodu
.
Wiadomo też, że największą siłę napędową uzyskać można na biegu I, stąd
. Gdy jeszcze przyjmie się, że
to
7. REAKCJE NAWIERZCHNI.
W zależności od warunków ruchu samochodu można wyróżnić następujące rodzaje reakcji nawierzchni, po której samochód się porusza:
reakcje statyczne - siły, z jakimi nawierzchnia działa na samochód stojący,
reakcje ruchowe - siły, z jakimi działa na samochód będący w ruchu idealnie gładka nawierzchnia,
reakcje dynamiczne - siły oddziaływania nawierzchni na samochód w rzeczywistych warunkach ruchu.
7.1. Statyczne reakcje nawierzchni
Statyczne reakcje nawierzchni wyznaczyć można przy uproszczeniu, że pomijane są siły boczne i zakłada się symetryczność obciążeń kół jezdnej osi.
Z równań równowagi momentów kolejno dla osi przedniej i tylnej wyznacza się:
dla spadku będzie „-''
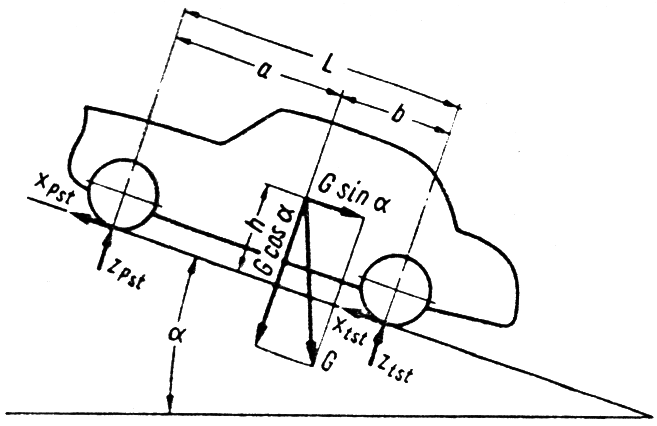
Rys. 37.. Reakcje statyczne nawierzchni, oddziałujące na stojący samochód.
Jak widać dociążana jest tutaj oś tylna.
Na jezdni poziomej, tzn. gdy
to
gdzie
, Gp - obciążenie osi pojazdu.
λst - współczynnik statycznego obciążenia osi pojazdu.
Z równania sił na płaszczyźnie jezdni
Poszczególne wartości
i
są statyczne niewyznaczalne.
Na podstawie znajomości obciążeń osi można wyznaczyć położenie środka ciężkości pojazdu (wymiary: b, c).
7.2. Reakcje ruchowe
Biorąc pod uwagę najbardziej ogólny przypadek tj.
,
- ruch przyspieszony pod górę - rozpatrywać można następujący układ sił.
Siła oporu powietrza
działa na środek naporu SN. W środku masy działa siła bezwładności
oraz samochód ciągnie przyczepę obciążającą go siłą FH. Reakcje normalne
i
są przesunięte o wielkość
i
ku przodowi. Zakłada się, że
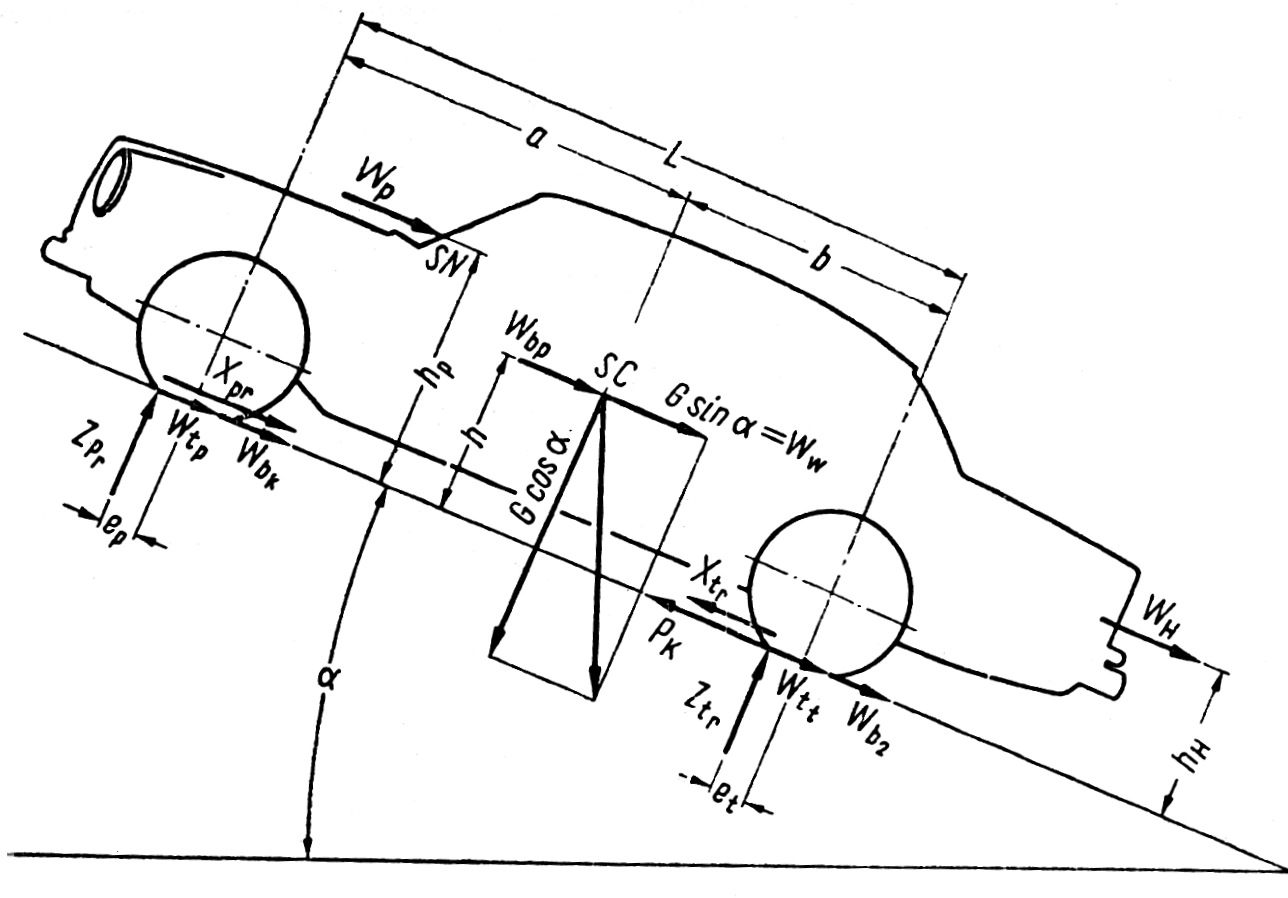
Rys. 38. Siły zewnętrzne działające na samochód będący w ruchu
Samochód ma dwie osie z tym, że napędzana jest tylko oś tylna. Z warunku równowagi względem punktu przyłożenia reakcji Zt otrzymuje się:
oraz z analogicznego warunku dla punktu przyłożenia reakcji Zp mamy:
Wyrażenie
czyli w przybliżeniu jest to suma momentów oporów toczenia
Zatem podstawiając otrzymuje się
Jak widać - wszystkie opory ruchu powodują dociążanie kół osi tylnej i odciążanie kół osi przedniej.
Wprowadźmy uproszczenia:
Samochód bez przyczepy →
Środek transportu leży na wysokości →
Ponieważ opór bezwładności mas wirujących jest znacznie mniejszy niż opór bezwładności samochodu można przesunąć wektory
i
do środka masy i przyjąć całkowity opór bezwładności
Zakłada się, że współczynniki oporu toczenia
, jak i współczynniki przyczepności
występujące na poszczególnych kołach, są sobie odpowiednio równe.
Zatem otrzymuje się
Do równania ruchu samochodu
podstawia się FH = 0 i zapisuje się je w postaci
Otrzymuje się zatem
Podstawiając
i
Widać tu, że wielkość reakcji normalnych nawierzchni w czasie ruchu samochodu zależy od:
parametrów konstrukcyjnych: G, l, a, b, h, rd ,
wielkości momentu napędowego: Mk,
warunków drogowych:
,
.
Wzory te są ogólne. Wybierać można różne szczególne sytuacje np. gdy samochód stoi na pochyłości to
, a do kół przykładamy moment hamujący
. Po podstawieniu uzyska się wzory wyprowadzone wcześniej (dla statycznych reakcji nawierzchni). Gdy samochód stoi na płaszczyźnie poziomej to
,
,
otrzymuje się wtedy wzory na statyczny rozkład obciążeń osi:
Wzory (), () można dodatkowo uprościć ponieważ
, zwykle
i
zatem
.
Pomijając wyrażenie
można zapisać
Wielkości te nie zależą od tego, czy moment napędzający
przyłożony jest do osi kół tylnych, czy przednich.
Ponieważ w czasie ruchu samochodu ulega zmianie rozkład obciążeń osi w zależności od wielkości momentu napędowego
to należy wprowadzić współczynnik ruchowego obciążenia osi napędzanej λr.
Współczynnik ten (λr) to stosunek obciążenia normalnego osi napędzanej do całkowitego ciężaru samochodu w czasie ruchu.
W zależności od typu napędu współczynnik ruchowego obciążenia osi napędzanej przyjmuje wartości:
napęd przedni
napęd tylny
napęd na 4 koła
7.3. Reakcje graniczne ze względu na poślizg
Ze wzorów (2a) i (2b) wynika, że obciążenia osi zmieniają się w zależności od
. Wzrost obciążenia kół może następować do wystąpienia poślizgu. Wtedy moment
osiąga największą wartość możliwą do wykorzystania
. Graniczna wartość siły napędowej zależy od obciążenia osi napędzanej w tych warunkach.
Utrzymując w mocy przyjęte uprzednio uproszczenia można określić styczne reakcje nawierzchni oddziałujące na koło napędzane w zależności od typu napędu (należy odpowiednio przenieść lub rozdzielić siłę napędową Fk)
napęd przedni
napęd tylny
napęd na 4 koła
Graniczna wartość reakcji wynosi
Wtedy można określić wielkość granicznego momentu napędowego
(przy którym zacznie się poślizg kół napędowych).
Napęd przedni
Napęd tylny
Napęd na 4 koła
Podstawiając powyższe zależności do wzorów (2a) i (2b) (i po uporządkowaniu) otrzymuje się wartości granicznych reakcji normalnych nawierzchni oddziałujących na oś napędzaną samochodu:
napęd przedni:
napęd tylny:
napęd na 4 koła:
Te obciążenia osi napędzanych decydują o możliwościach trakcyjnych pojazdu. Największe momenty napędowe dla różnych typów napędu można obliczyć podstawiając
do wzoru na
. Wtedy :
napęd przedni
napęd tylny
napęd na 4 koła
Określić można też graniczny współczynnik obciążenia osi napędzanej
czyli:
Mając określony graniczny współczynnik obciążenia osi
można określić:
- największą styczną reakcję nawierzchni
- największą normalną reakcję nawierzchni
- maksymalną siłę napędową
- graniczny moment napędowy
przy czym wartość
podstawia się w zależności od typu napędu, czyli
,
,
.
7.4. Porównanie właściwości trzech różnych układów napędu
Zakłada się jednakowe warunki drogowe -
i
. Porównuje się trzy samochody o tym samym ciężarze całkowitym G, wymiarach: l, b, c, h, rd. Różne są układy napędowe: przedni, tylny, i 4 koła.
Stosunek granicznych momentów napędowych (ze względu na przyczepność) jest następujący:
Aby zorientować się w wielkości tego stosunku rozważyć można następujący przykład: załóżmy, że układ statycznych obciążeń na osie jest jednakowy - po 50% (spotyka się go w samochodach zarówno z napędem na przednią i tylną oś). Przyjmujemy dane:
- jak dla najczęściej spotykanych warunków drogowych, wtedy:
Jak widać w porównaniu z napędem na 4 koła - w samochodach z napędem tylnym można rozwinąć 60% możliwego momentu napędowego zaś z napędem przednim tylko 43%. Widać tu znaczący wpływ
(graniczny współczynnik obciążenia osi) na własności trakcyjne samochodu. Na wartość
wpływa położenie środka ciężkości: większe h także zwiększa
, a zmniejsza
. Aby zwiększyć
przesuwa się środek ciężkości do przodu samochodu.
Wartość
zależy też mocno od warunków drogowych głównie od
,
- można w zasadzie pominąć. W przypadku napędu na 4 koła graniczny moment napędowy osiągnąć można tylko wtedy, gdy na obu osiach jednocześnie wystąpią graniczne siły napędowe. Warunkiem takim jest
. Z przyrównania wzorów na
wynika, że:
Zwykle jest to możliwe do spełnienia tylko w pewnych konkretnych warunkach drogowych. W każdych innych warunkach drogowych, gdy zmieni się
, lub
, zmniejszy się
.
Układy napędowe na 4 koła mogą zawierać międzyosiowy mechanizm różnicowy, rozdzielający moment obrotowy na dwie osie w pewnym stosunku. Pełne wykorzystanie przyczepności kół może nastąpić tylko wtedy, gdy graniczne obciążenia osi będą też w tym samym stosunku. Jednakże każda zmiana czynnika
zakłóci ten stan i spowoduje zmniejszenie momentu napędowego kół. Dlatego praktycznie w tym wypadku wszystkie koła nigdy nie dochodzą razem do granicznej przyczepności i zawsze któraś z osi zacznie się ślizgać pierwsza.
Jeżeli w układzie na 4 koła nie ma mechanizmu różnicowego to można wykorzystać pełny nacisk samochodu, bo pojedyncze osie nie dochodzą do poślizgu. Ta, która traci przyczepność, nie może zwiększyć prędkości kątowej bo jest połączona kinematycznie z innymi.
Wobec tego w wypadkach koniecznych należy stosować blokowanie mechanizmu różnicowego. Jednakże przy jeździe normalnej, bez mechanizmu różnicowego, występują dodatkowe naprężenia między osiami - wtedy należy wyłączyć napęd jednej osi.
Te naprężenia, tzw. moc krążąca, to powód stosowania mechanizmu różnicowego między osiami.
7.4. Zdolność napędowa samochodu
Zdolność napędowa samochodu jest to stosunek granicznej siły napędowej do ciężaru samochodu.
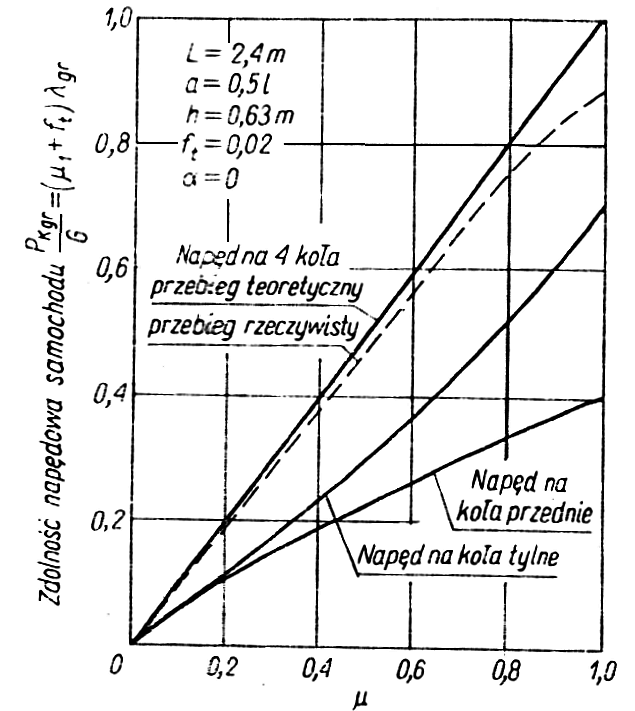
Przykładowy przebieg zdolności napędowej przedstawiony jest na wykresie dla
i stałego
na rys. 39.
Rys. 39. Zdolność napędowa samochodu, w zależności od współczynnika przyczepności μ1
Z powyższego wynika, że przy tym samym ciężarze samochodu, w celu pełnego wykorzystania przyczepności kół trzeba doprowadzić mniejszy moment napędowy w napędzie przednim niż w przypadku napędu tylnego. Natomiast w napędzie na 4 koła moment doprowadzony do kół musi być jeszcze o wiele większy. To zjawisko, mniejsza moc silnika, jest przyczyną popularności napędu przedniego.
Wartości
do obliczeń można przyjmować znając
(dla przeciętnych warunków drogowych
i
)
7.5. Wpływ momentu obrotowego silnika na reakcje nawierzchni
Zjawisko to można przeanalizować na bazie następującego przykładu: układ klasyczny - zwykle zakłada się symetryczność obciążeń kół (napędzana oś tylna, silnik z przodu) a w rzeczywistości moment
obrotowy na wale powoduje dociążenie lewego tylnego koła i odciążenie prawego tylnego koła. Jednocześnie na korpus silnika działa moment reakcyjny
i poprzez mocowanie stara się obrócić nadwozie (ramę). Przez resory powoduje dociążenie koła przedniego prawego i odciążenie koła przedniego lewego. Część tego momentu (z uwagi na skręcenie ramy) dociąża prawe tylne koło i odciąża lewe tylne, zmniejszając działanie momentu
.
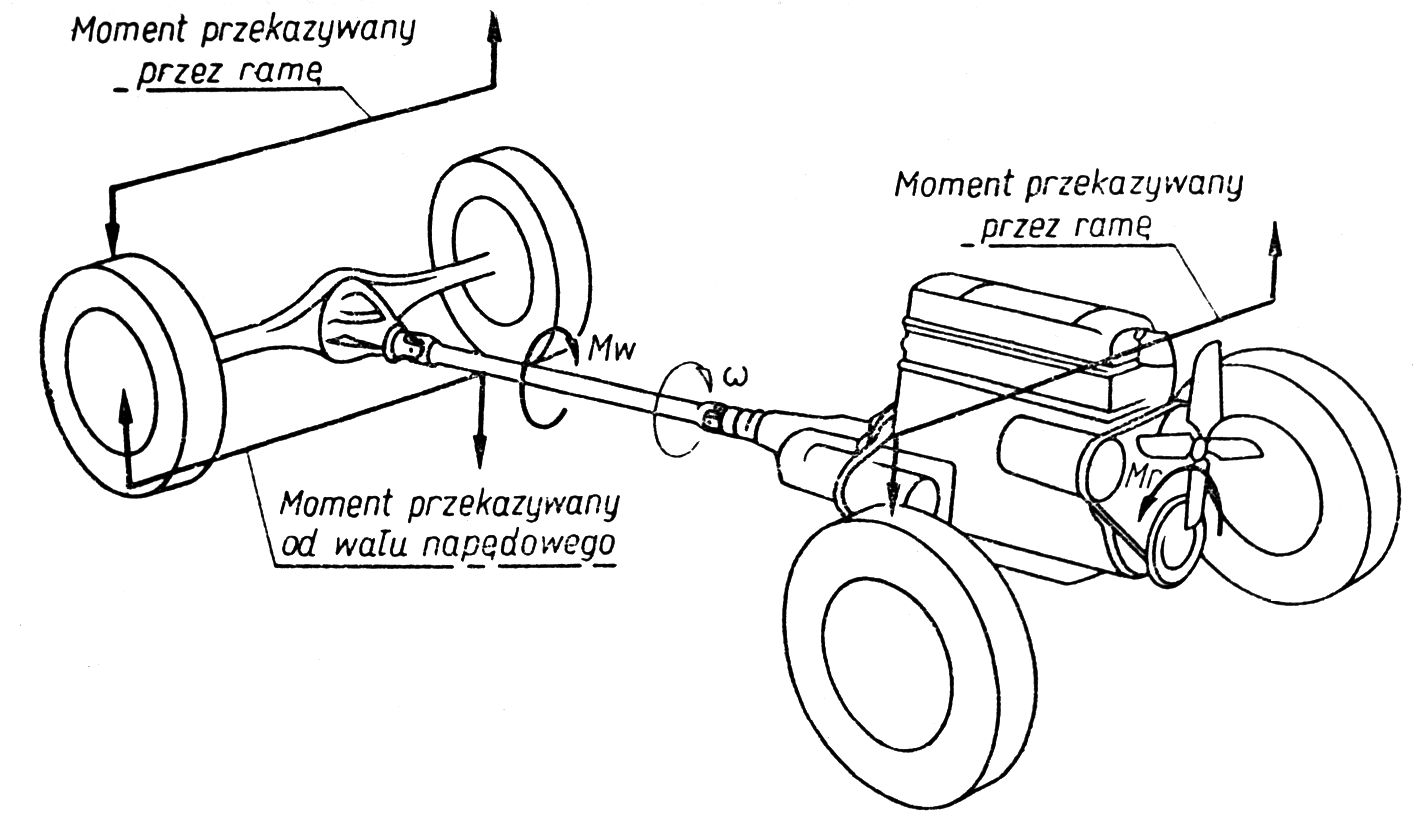
Rys. 40. Wpływ momentu obrotowego silnika na dociążenie i odciążenie poszczególnych kół.
W innych układach analiza obciążeń kół wygląda odpowiednio.
8. DOBÓR PRZEŁOŻEŃ
Przełożenie - pod tym pojęciem rozumie się stosunek prędkości obrotowej lub kątowej elementu napędzającego do prędkości obrotowej (kątowej) elementu napędzanego.
Przełożenie obrotów - jest to bardziej ścisła nazwa przełożenia.
Przełożenie momentu - stosunek momentu obrotowego na wejściu do momentu na wyjściu i jest odwrotnością przełożenia obrotów, gdy nie uwzględniamy strat w przekładni.
Przełożenie kinematyczne - stosunek prędkości na wyjściu urządzenia do prędkości wejściowej.
Przełożenie dynamiczne - stosunek momentu obrotowego na wyjściu urządzenia do momentu wejściowego.
Przełożenie całkowite - stosunek prędkości obrotowej wału silnika do prędkości obrotowej kół napędzanych samochodu.
gdzie
- przełożenie stałe np. przekładni głównej, zwolnic,
- przełożenie wybieralne - najczęściej w skrzyni biegów, może być wybierane skokowo lub ciągle, bezstopniowo.
Zatem
Zależność między prędkością obrotową silnika a prędkością liniową samochodu:
gdzie rt [m], ns [obr/min], V [km/h].
Gdy przyjmie się, że
to
Przełożenie całkowite można wyznaczyć jako
.
Rozważany tu będzie dobór przełożeń samochodu wyposażonego w skrzynię biegów o przełożeniach wybieranych skokowo. W tym przypadku zagadnienie doboru przełożeń obejmuje następujące etapy:
dobór przełożenia całkowitego na biegu najszybszym (przełożenie najmniejsze),
dobór przełożenia całkowitego na biegu najwolniejszym (przełożenie największe),
dobór ilości przełożeń,
dobór przełożeń biegów pośrednich.
8.1. Dobór przełożenia całkowitego na biegu najszybszym
Uwzględnia się tu trzy aspekty:
prędkość maksymalna samochodu,
zapas mocy na pokonanie wzniesienia i przyspieszenie samochodu,
ekonomiczność zużycia paliwa.
Analizę przeprowadzić można na podstawie wykresu mocy na kołach samochodu. Krzywa Nt0 + Np = f(V) przedstawia zapotrzebowanie mocy w ruchu jednostajnym na płaskiej nawierzchni. Krzywa Nk = f(V) przedstawia moc na kołach, która zależy od zastosowanego przełożenia.
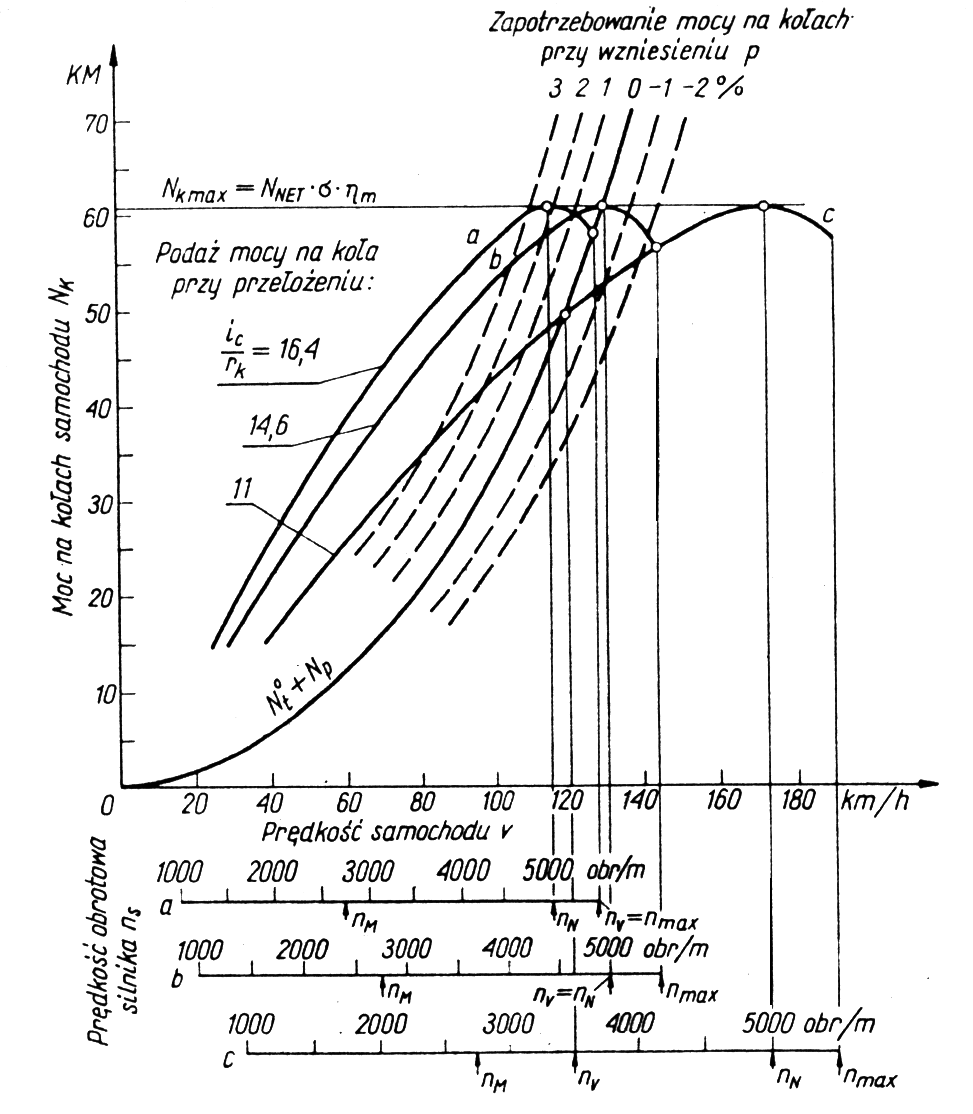
Rys. 41. Wpływ przełożenia szybkobieżności na przebieg granicznej wartości mocy na kołach, na prędkość maksymalna samochodu, oraz na prędkość obrotowa silnika.
Wyróżnić można trzy przełożenia odpowiadające krzywym a, b, c. Wykres ten będzie odpowiadać silnikom gaźnikowym (chodzi o kształt krzywej). Wiadomo, że prędkość maksymalna jest większa od
o
.
W przypadku krzywej b przełożenie jest tak dobrane, że samochód osiąga największą prędkość jazdy V. Silnik tu nie może przekroczyć swojej prędkości nN. Można nazwać je przełożeniem prędkościowym. Jeżeli przesuniemy krzywą mocy (zwiększając przełożenie) w lewo - a, to w przypadku, gdy silnik oddaje swoją maksymalną moc, ma jeszcze zapas na przyspieszenie lub pokonywanie wzniesienia. W tym przypadku silnik może przekroczyć prędkość obrotową nN wykorzystując cały zakres prędkości. Jednak
tutaj jest mniejsza niż w przypadku b, ale występujący duży zapas mocy spowoduje, że samochód będzie szybszy jeżeli jazda będzie odbywać się pod niewielkie wzniesienie 1÷1,5%. Ten rodzaj przełożenia można nazwać przełożeniem dynamicznym. W porównywalnych warunkach jazdy silnik przy przełożeniu b pracuje przy niższej prędkości obrotowej niż w a, zatem ciszej pracuje , mniej się zużywa, mniej spala paliwa. Poza tym na zjazdach silnik mniej się rozpędza (powyżej nN, co jest dla niego bardziej bezpieczne).
Stosując przełożenie jeszcze mniejsze niż b uzyskuje się krzywą c. Jak widać silnik nie osiąga mocy maksymalnej, ma słabe możliwości przyspieszania i pokonywania wzniesień oraz będzie mało elastyczny. Ale za to pracuje przy niższych prędkościach obrotowych, czyli będzie małe zużycie paliwa, a praca silnika cicha i przy niewielkich zużyciach. Słabe właściwości trakcyjne narzucają stosowanie takiego przełożenia tylko na płaskich, długich, prostych odcinkach drogi, gdy często się nie przyspiesza np. autostrady. Można nazwać to przełożenie - przełożeniem ekonomicznym.
W każdym z powyższych przypadków określamy przełożenie biegu najszybszego czyli przełożenie najmniejsze wg zależności:
gdzie
- promień dynamiczny koła,
- prędkość obrotowa silnika przy prędkości jazdy Vmax,
- maksymalna prędkość jazdy samochodu.
Zakłada się prędkość Vmax, którą samochód powinien osiągnąć natomiast nv dobiera się wg typu przełożenia (inaczej typu metody stopniowania skrzyni biegów):
a) stopniowanie dynamiczne nv > nN maksymalnie (1,1÷1,12)⋅nN
b) stopniowanie prędkościowe nv = nN praktycznie (0,95÷1,05)⋅nN
c) stopniowanie ekonomiczne nv < nN
Stosunek
zwany jest współczynnikiem przewyższenia obrotów.
Znając najmniejsze przełożenie całkowite obrotów można określić przełożenie przekładni głównej:
Najczęściej przyjmuje się
(tzw. układ klasyczny) ze względu na trwałość lub
na przykład w skrzynkach dwuwałkowych (ze względów konstrukcyjnych).
W nowoczesnych samochodach osobowych stosuje się przeważnie współczynnik przewyższenia obrotów równy jeden lub nieco mniejszy od jedności, ponieważ:
mała wartość przełożenia umożliwia oszczędne zużycie paliwa,
w przeciętnych warunkach jazdy opory drogi ograniczają prędkość obrotową,
w przypadku jazdy jednej lub dwóch osób opory są mniejsze, co umożliwia wykorzystywanie mocy maksymalnej do osiągnięcia dużej prędkości,
do osiągania dużych przyspieszeń służy bieg przedostatni.
Przełożenie biegu najszybszego oznacza się przez iz, wtedy przełożenie przekładni głównej
W celu polepszenia ekonomiczności samochodu stosuje się bieg dodatkowy o przełożeniu iz+1 < 1 zwany nadbiegiem. Największe przełożenie nadbiegu określa stosunek no/nv, wartości przełożenia nadbiegu iz+1 = 0,7÷0,8.
W samochodach ciężarowych prędkość maksymalna wyznaczana jest przez regulator, czyli ogranicznik prędkości obrotowej silnika.
Wtedy przełożenie minimalne
Przełożenie nadbiegu dobiera się tak, aby uniemożliwić jazdę całkowicie załadowanego pociągu drogowego przy użyciu nadbiegu.
8.2. Dobór przełożenia biegu najwolniejszego
Dobór przełożenia biegu I dokonuje się wg kryteriów:
Maksymalnego przyspieszenia przy ruszaniu z miejsca
Zdolności pokonywania określonego wzniesienia
Pełnego wykorzystania siły przyczepności.
Wartość przełożenia biegu I decyduje o rozpiętości przełożeń w skrzyni biegów.
8.2.1. Maksymalne przyspieszenie
Przyspieszenie chwilowe samochodu na płaskiej drodze określane jest jako:
Osiąga ono największą wartość, gdy silnik rozwija moment maksymalny, wtedy:
W tych warunkach (tzn. przy ruszaniu z miejsca)
,
także
, czyli:
bo
Przedstawiając na wykresie zależność
otrzymamy następującą krzywą:
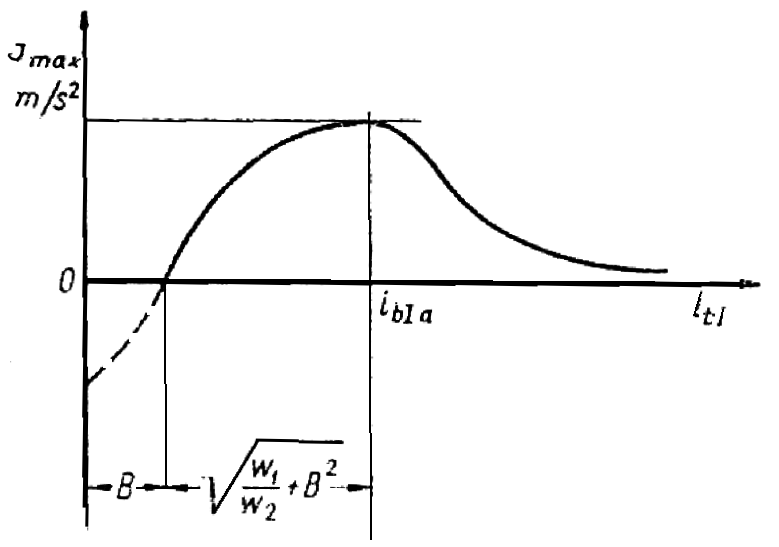
Rys.42 . Zależność maksymalnej wartości przyspieszenia na I biegu amax od przyjętego przełożenia ibI
Widać tu, że przy pewnej wartości
występuje maksimum wartości
. Aby znaleźć maksimum należy pochodną tej funkcji przyrównać do zera. Czyli zapisujemy równanie następująco:
Oznaczamy
Wtedy
zaś pochodna po przyrównaniu do zera to:
po rozwiązaniu i odrzuceniu pierwiastków ujemnych
wyraz
można pominąć bo
inne zatem
Jednak tu należy obliczać indywidualnie momenty bezwładności kół i silnika, bo wartości średnie mogą prowadzić do dużych błędów.
8.2.2. Maksymalne wzniesienie
Na podstawie równania ruchu można napisać:
W warunkach ruszania z miejsca
,
, zatem
przyjmując za
otrzymuje się
i dzieląc obie strony przez
otrzymuje się
Występuje tu jednakże ograniczenie α < αgr względu na przyczepność kół.
8.2.3. Graniczna siła przyczepności
Wartość przełożenia na I biegu (szczególnie duża) jest ograniczona przez maksymalną wartość siły napędowej ze względu na przyczepność koła
Ponieważ
oraz
ze względu na małą prędkość jazdy
zatem
W zależności od rodzaju napędu ze względu na współczynnik obciążenia
8.2.4. Metoda obliczania przełożenia I biegu przy założonej wartości siły pociągowej
Metoda ta może być stosowana z tego powodu, iż obliczanie przełożenia I biegu przy różnych kryteriach daje rozbieżne wyniki, Ponadto obliczenia według kryterium maksymalnego przyspieszenia są kłopotliwe ze względu na nieznane momenty bezwładności kół i silnika.
Samochody z napędem przednim oblicza się ze względu na przyczepność, a z napędem tylnym - ze względu na graniczne wzniesienie (gdyż te mają bardzo dużą graniczną przyczepność). Można zaproponować stosowanie metody obliczania przełożenia biegu I ze względu na założoną graniczną wartość jednostkowej siły napędowej pk.
Na podstawie przeprowadzonych obliczeń kilkuset nowoczesnych samochodów można przyjąć następujące wartości pk:
Tabela.16. Wartości maksymalnej jednostkowej siły napędowej na I biegu
Rodzaj pojazdu |
pkI |
Samochody osobowe - do 1000 cm3 |
0,22÷0,26 |
Samochody osobowe - 1000÷1300 cm3 |
0,30÷0,36 |
Samochody osobowe - 1300÷1500 cm3 |
0,36÷0,42 |
Samochody osobowe - powyżej1500 cm3 |
0,48÷0,70 |
Samochody ciężarowe z napędem na oś tylną |
0,23÷0,28 |
Samochody ciężarowe z przyczepą |
0,4 |
Dla samochodów średniej klasy z napędem przednim przyjmuje się jako wartość graniczną pk = 0,37 ze względu na przyczepność.
Ponieważ
oraz
to przy założonej wartości
którą należy osiągnąć
lub
8.3. Dobór ilości przełożeń
Rozpiętością przełożeń skrzyni biegów nazywamy stosunek przełożenia biegu najwolniejszego do najszybszego.
Jak widać rozpiętość przełożeń oblicza się na podstawie wymaganych przełożeń najszybszych i najwolniejszych.
8.3.1. Sposób obliczania
na podstawie
Zakłada się wartość pkI biegu pierwszego wg tabeli. Następnie przyjmuje się wartości pkn dla biegu najszybszego według następującej tabeli:
Tabela.17 . Wartości maksymalnej jednostkowej siły napędowej na biegu najszybszym
Rodzaj pojazdu |
pkn |
Samochody osobowe - małe |
0,05÷0,075 |
Samochody osobowe - skrzynia IV biegowa |
0,1±0,02 |
Samochody osobowe - skrzynia V biegowa |
0,07÷0,075 |
Samochody ciężarowe |
0,03÷0,05 |
Następnie można obliczyć:
przy założeniu, że
otrzymuje się
8.3.2. Liczba przełożeń w skrzyni biegów
Zależność między prędkością samochodu V i obrotami silnika ns można przedstawić na wykresie.
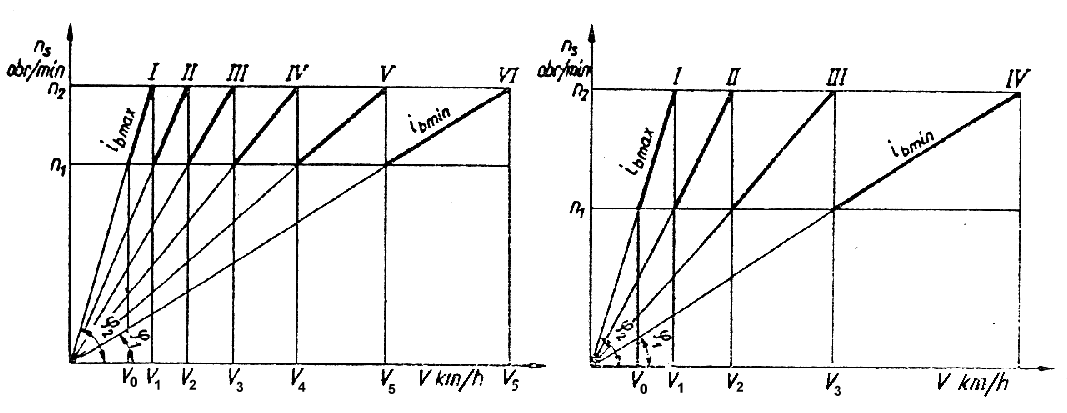
Rys. 43. Zależność ilości przełożeń pośrednich od przyjętej rozpiętości prędkości obrotowych silnika n2:n1
Zależności dla poszczególnych biegów są liniami prostymi.
Dobór ilości przełożeń polega na wypełnieniu przestrzeni rozpiętości pewną liczbą biegów pośrednich. Klasycznym podejściem jest przyjęcie, aby silnik pracował w zakresie określonych prędkości obrotowych
i aby osiągnięcie tych prędkości powodowało zmianę przełożenia. Stosunek przełożenia jednego biegu do przełożenia kolejnego następnego biegu nazywa się rozpiętością przełożeń między biegami
podobnie
zatem
;
;
gdzie z - ilość przełożeń
Jak widać jest to układ przełożeń wg postępu geometrycznego. Wtedy rozpiętość przełożeń
jeżeli jest z przełożeń to mamy z-1 poszczególnych rozpiętości między biegami, stąd można określić liczbę przełożeń:
gdzie
Wynik obliczeń z zaokrąglamy zawsze w górę.
Rozpiętość przełożeń q może być ustalona kilkoma sposobami:
Na zasadzie równej mocy przy zmianie biegu, zawartej w granicach Nmax÷βNmax - co prowadzi do dużej liczby biegów i pracy silnika przy wysokiej prędkości obrotowej i w nieekonomicznym zakresie.
Na zasadzie niezmiennego chwilowego przyspieszenia samochodu.
Na zasadzie pracy silnika na każdym biegu w zakresie prędkości obrotowych nM i nN. Jest to najczęściej wybierany sposób ponieważ zakres pracy silnika jest tu najbardziej korzystny - minimum zużycia paliwa, wysokie wartości momentu i mocy.
Zatem najczęściej
Rozpiętość przełożeń między biegami jest wtedy liczbowo równa elastyczności prędkości obrotowej silnika
Rys. 44. Dobór rozpiętości prędkości obrotowej silnika n2:n1 w oparciu o przebieg granicznych wartości mocy rozporządzalnej na kołach samochodu.
Rys. 45. Dobór rozpiętości prędkości obrotowych silnika n2:n1 w oparciu o przebieg przyspieszenia samochodu.
Ilość przełożeń wpływa na stopień wykorzystania pola podaży siły napędowej. Skrzynie o mniejszej liczbie biegów są tańsze i prostsze. Wymagają jednak silnika o dużej elastyczności i dużym stosunku Mmax/G.
Takie skrzynie (3 biegowe) były stosowane w dużych samochodach osobowych. Jednak stosowanie słabszych silników w tanich samochodach narzuciło stosowanie skrzynek biegów przynajmniej 4-biegowych. Obecnie stosuje się większą ilość biegów (najczęściej 5) choć powoduje to większe absorbowanie uwagi kierowcy i straty czasu na przełączanie biegów. Z drugiej strony możliwe jest stosowanie silników o mniejszej elastyczności. Także przekładnie automatyczne lepiej dopasowują warunki pracy silnika przy większej liczbie przełożeń wybieralnych (obecnie 4 biegi). Czas rozpędzania przy większej liczbie biegów może być gorszy ze względu na straty przy przełączaniu.
W samochodach ciężarowych stosuje się większe liczby biegów w celu lepszego doboru przełożenia do zakresu ekonomicznej pracy silnika, szczególnie w warunkach jazdy terenowej. Ilość biegów powyżej 6 uzyskuje się często przez stosowanie przekładni dodatkowej - reduktora.
8.4. Dobór przełożeń biegów pośrednich
Przełożenia biegów pośrednich określa się w zasadzie dwiema metodami:
Według postępu geometrycznego,
Według podwójnego postępu geometrycznego.
8.4.1. Metoda według postępu geometrycznego
Zakładając określone prędkości obrotowe n1 i n2 mamy stałą rozpiętość przełożeń między kolejnymi biegami (wg rys. )
.
Jeżeli ilość biegów ustali się na z i przełożenie biegu najszybszego na iz to kolejne przełożenia wyniosą:
...............
gdzie
Układ przełożeń wg postępu geometrycznego zapewnia najlepszy stopień wypełnienia pola podaży mocy, ale nie jest najkorzystniejszy z punktu widzenia własności ruchowych samochodu. Zakres prędkości jazdy na biegu I i II jest stosunkowo mały. Także przy przełączaniu z biegu II na III jest już niska moc silnika. Zatem korzystnie jest tak zmienić przełożenie biegu pośredniego, aby zwiększyć zakres mocy przy przełączaniu z biegu II na III oraz zwiększyć zakres prędkości jazdy na biegu pośrednim.
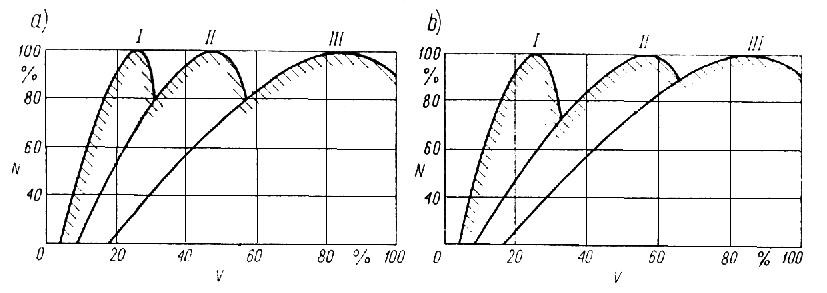
Rys. 46. Przebieg granicznych wartości rozporządzalnej mocy na kołach w funkcji prędkości samochodu: a - przy uszeregowaniu przełożeń według postępu geometrycznego, b - przy przesuniętym przełożeniu II-go biegu
Jak widać, moc rozporządzalna przy dużych prędkościach (średnio) powiększyła się, a przy małych - spadła (w zakresie n rzadko używanym).
Ogólny wniosek: bez względu na liczbę biegów koryguje się przełożenie tak, aby zbliżyć je nieco do przełożenia biegu najszybszego. Zatem rozpiętość q nie powinna być stała, ale powinna się zmniejszać. Korekcję można robić indywidualnie, ale najpopularniejsze podejście to takie, że q stopniowo maleje według postępu geometrycznego.
8.4.2. Metoda według podwójnego postępu geometrycznego
Rozpiętość między biegami maleje według postępu geometrycznego (przy stałym stosunku a). Zaś jej początkowa wartość ustalona jest jako liczba k. Zatem wartość ilorazu postępu q jest zmienna od biegu do biegu i poczynając od biegu najwyższego kolejno wynosi:
......................
Całkowita rozpiętość przełożeń jest iloczynem wszystkich qi i wynosi:
Można zatem określić ciąg przełożeń; gdy
……………………………………
Współczynnik a będący ilorazem wtórnego postępu geometrycznego ma najczęściej wartość
. Określa się go także według wzoru
lub dla nowych konstrukcji
Iloraz podstawowy k określa się według wzoru (z przekształcenia wzoru na całkowitą rozpiętość przełożenia Ib)
Przyjęte wg przedstawionej metody wielkości przełożeń biegów pośrednich należy traktować jako pierwsze przybliżenie. Należy następnie przeprowadzić jeszcze korekcje przyjętych przełożeń opierając się na analizie wykresu trakcyjnego samochodu, zdolności przyspieszania oraz charakterystyki ekonomicznej samochodu.
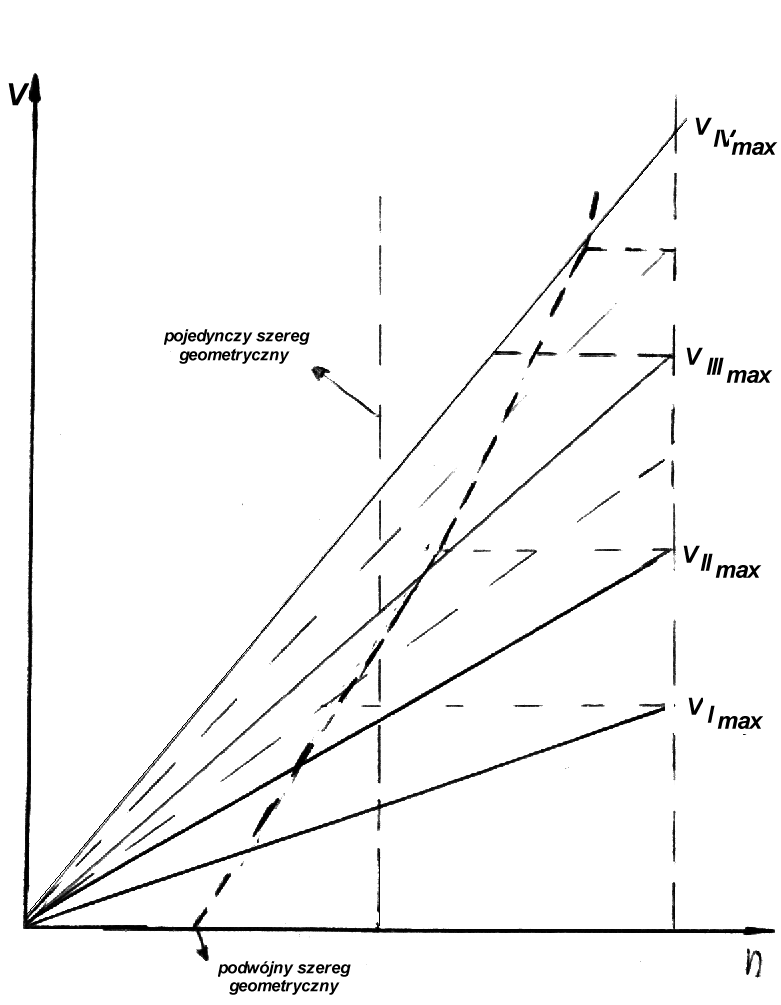
Rys.47. Dobór przełożeń według pojedynczego postępu geometrycznego (linie ciągłe) i według podwójnego postępu geometrycznego (linie przerywane)
1
102
Wyszukiwarka
Podobne podstrony:
HIPERBARIA 3a2
misztal kolos trp szynowy
Koło, kolo TRP ściąga, REGULTORY
misztal- kolos trp szynowy
Koło, ściąga całość trp, 1
trp, Elektroradiologia - studia, I rok, Techniki Rengenowskie, Koło
TRP-kol-1, MiBM Politechnika Poznańska, Semestr V
Cisza Trp 2
TRP-Rys49-59ang, MiBM Politechnika Poznańska, Semestr V
TRP-Rys49-59, Rys
TRP-p-eg-zam, MiBM Politechnika Poznańska, Semestr V
Cisza Trp 1
TRP 1a
TRP rys35 48ang
TRP-rys35-48, MiBM Politechnika Poznańska, Semestr V
sprawko trp stateczność wywrotna sierzputowski
trp hamowanie
trp zawieszenie
więcej podobnych podstron