Wydział Elektryczny Politechniki Poznańskiej |
|||
Laboratorium Podstaw Elektrotechniki Ćwiczenie nr 8 Temat: Badanie 3 - fazowego silnika indukcyjnego pierścieniowego
|
|||
Rok akademicki: 2006 / 2007
Wydział Elektryczny
kierunek Elektrotechnika
Specjalność: elen
|
Wykonawcy:
|
Data |
|
|
|
Wykonania ćwiczenia |
Oddania sprawozdania |
|
|
|
|
|
|
Ocena:
|
|
Uwagi:
|
|||
1. Wiadomości teoretyczne
Silnik pierścieniowy jest to konstrukcja silnika asynchronicznego, w którym końce uzwojeń wirnika wyprowadzone są na zewnątrz za pomocą pierścieni ślizgowych. Dzięki temu w uzwojenia wirnika można włączać dodatkowe rezystancje, które zmieniają jego charakterystykę (zwiększają w pewnym zakresie moment rozruchowy). Silniki takie stosowano do układów o ciężkim rozruchu (np. silniki wyciągowe dźwigów).
Dominująca większość maszyn asynchronicznych pracuje jako silniki. Nierzadko jednak wykorzystujemy możliwość hamowania i generowania energii elektrycznej przez maszyny asynchroniczne. Ta sama maszyna może pracować jako silnik, hamulec lub generator asynchroniczny.
Po przyłączeniu obwodu stojana do sieci, niezahamowany wirnik zaczyna wirować w kierunku wirowania pola i po pewnym czasie osiąga ustaloną prędkość obrotową n, której wartość zależy od wartości momentu obciążenia. Maszyna pracuje jako silnik; pobierana z sieci moc elektryczna zamienia się w moc mechaniczną, wydawaną na wale. W maszynie powstają straty, z których główne to straty w uzwojeniach stojana i wirnika oraz straty w rdzeniu stojana. Chcąc uzyskać prędkość synchroniczną maszyny asynchronicznej należy napędzić ją z zewnątrz za pomocą silnika, który pokona moment oporów tarcia i wentylacji. Gdyby opory te nie występowały, wówczas wirnik doprowadzony do prędkości synchronicznej utrzymałby się samoistnie w tym stanie, zwanym idealnym biegiem jałowym
Napędzając wirnik nadal w tym samym kierunku z prędkością większą niż
prędkość synchroniczna powodujemy zmianę kierunku ruchu wirnika względem pola w porównaniu z kierunkiem ruchu przy pracy silnikowej. Zmianie tej towarzyszy zmiana kierunku działania momentu elektromagnetycznego, co przy niezmienionym kierunku wirowania świadczy o pracy prądnicowej maszyny. Moc mechaniczna prowadzaną przez silnik napędzający zamienia się teraz w moc elektryczną, wydawaną przez maszynę asynchroniczną do sieci. Pracę w tym stanie można wykorzystać zarówno do celów wytwarzania energii elektrycznej, jak i do hamowania. Zależnie od tego jakim celom służy maszyna w tym stanie nazywamy ją prądnicą lub hamulcem.
W przypadku napędzania wirnika w kierunku przeciwnym do kierunku wirowania pola kierunek ruchu pola względem wirnika jest taki, jak przy pracy silnikowej.
Powstający w tych warunkach moment elektromagnetyczny ma kierunek przeciwny do kierunku ruchu wirnika. Zjawisko to wskazuje na hamulcowy charakter pracy maszyny asynchronicznej.
Przy biegu jałowym maszyny asynchronicznej wirnik wiruje z prędkością niemal synchroniczną. Poślizg jest znikomo mały, w przybliżeniu s = 0,001.
Prąd jałowy maszyn asynchronicznych przy zasilaniu napięciem znamionowym wynosi około I0≈(0,25…0,5)IN. Na podstawie próby biegu jałowego można wyznaczyć parametry poprzeczne schematu zastępczego RFe, oraz XG.
Stanem zwarcia maszyny asynchronicznej pierścieniowej nazywamy stan, który powstaje przy zasilaniu uzwojenia stojana napięciem przy unieruchomionym wirniku i jednocześnie zwartych pierścieniach. Pobierana przez maszynę w stanie zwarcia moc elektryczna w całości zamienia się w ciepło. Moc mechaniczna nie jest wydawana, ponieważ wirnik nie obraca się.
Napięcie zwarcia Uz jest to napięcie, jakie należy doprowadzić do uzwojenia stojana, aby przy unieruchomionym wirniku i zwartych pierścieniach popłynął prąd znamionowy. Napięcie zwarcia typowych maszyn asynchronicznych wynosi 10%... 25% UN. Jeżeli maszynę asynchroniczną zasilamy w stanie zwarcia napięciem znamionowym, to pobiera ona prąd zwarciowy, który w typowych maszynach stanowi 4...10IN. Na podstawie próby zwarcia wyznacza się parametry podłużne schematu zastępczego R1, R1', oraz Xr1, Xr2'.
Rozruch silników pierścieniowych przeprowadza się za pomocą rozrusznika Rd włączonego w obwód wirnika. Zmiana rezystancji Rd wpływa na zmianę momentu i prądu przy rozruchu. Wzrost rezystancji Rd powoduje przesuwanie się maksimum momentu w kierunku rosnących poślizgów przy równoczesnym zmniejszaniu się wartości prądu rozruchowego. Po przyłączeniu silnika do sieci zasilającej silnik rusza, pracując w warunkach odpowiadających przebiegowi charakterystyk na danym stopniu rozrusznika. Po osiągnięciu odpowiedniej prędkości obrotowej należy przełączyć rozrusznik na następny stopień Przełączenie powinno następować w takiej chwili, aby nic pojawił się prąd większy niż początkowy prąd rozruchu. Im większa jest liczba stopni rozrusznika tym płynniejszy. Po zakończeniu rozruchu rozrusznik należy zewrzeć.
2. Oględziny silnika, hamownicy oraz zapoznanie się z danymi znamionowymi badanej maszyny
Dane znamionowe maszyny indukcyjnej pierścieniowej:
PN=3,3kW
Is=9,5A
Iw=25A
cosφ=0,654
Us=380V~/Δ
Uw=95V
nN=940obr/min
3. Pomiar rezystancji uzwojeń
Rezystancja stojana Rs[Ω] |
Rezystancja wirnika Rw[Ω] |
2,7 |
0,11 |
4. Schemat układu pomiarowego
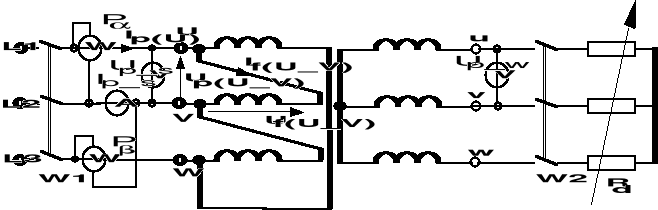
5. Próba zwarcia pomiarowego silnika
Pomiary:
l.p |
U |
I |
Pα |
Pβ |
P |
Q |
cosφ |
|
[V] |
[A] |
[W] |
[W] |
[W] |
[var] |
[-] |
1 |
42 |
2 |
-40 |
60 |
20 |
144,11 |
0,137 |
2 |
82 |
4 |
-80 |
260 |
180 |
538,84 |
0,317 |
3 |
116 |
6 |
-160 |
540 |
380 |
1144,05 |
0,315 |
4 |
148 |
8 |
-240 |
980 |
740 |
1912,58 |
0,361 |
5 |
170 |
9,5 |
-320 |
1300 |
980 |
2619,98 |
0,350 |
Przykładowe obliczenia:
Uz=116V
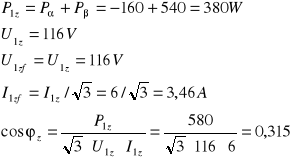
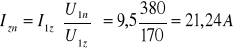
Prąd zwarciowy przy znamionowym napięciu zasilania
Wykresy:
6. Próba idealnego biegu jałowego
l.p |
U |
I |
Pα |
Pβ |
P |
Q |
cosφ |
|
[V] |
[A] |
[W] |
[W] |
[W] |
[var] |
[-] |
1 |
150 |
1,5 |
-120 |
120 |
0 |
389,71 |
0,000 |
2 |
200 |
2,1 |
-200 |
220 |
20 |
727,19 |
0,027 |
3 |
250 |
2,8 |
-300 |
360 |
60 |
1210,95 |
0,049 |
4 |
300 |
3,6 |
-460 |
540 |
80 |
1868,90 |
0,043 |
5 |
350 |
4,9 |
-720 |
900 |
180 |
2965,01 |
0,061 |
6 |
380 |
6 |
-960 |
1220 |
260 |
3940,51 |
0,066 |
Przykładowe obliczenia:
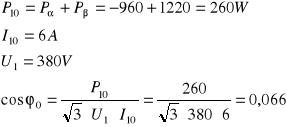
Moc bierna
![]()
Wykresy:
7. Wyznaczanie przekładni napięciowej oraz międzyuzwojeniowej.
![]()
przekładnia napięciowa
![]()
przekładnia międzyuzwojeniowa
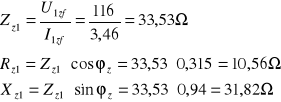
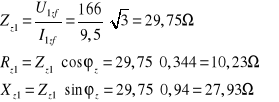
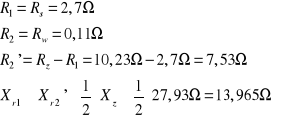
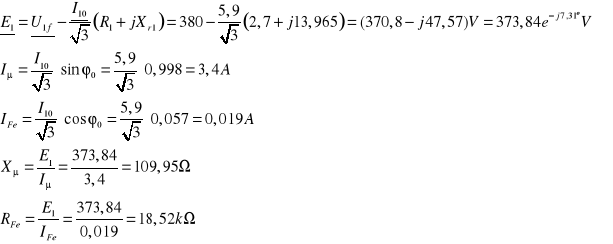
8 . Wyznaczenie i zestawienie parametrów schematu zastępczego sprowadzonego do napięcia na jednej fazie uzwojenia stojana
Schemat zastępczy badanego silnika
10 . Wyznaczanie charakterystyki mechanicznej dla Rdw=0 oraz Rdw≠0 dla napięcia zasilania równego napięciu zwarcia przy wymuszaniu prędkości wirowania od -ns do +1,3·ns
U=Uz, Rd=0 Ω
l.p. |
n |
I |
Pα |
Pβ |
P |
T |
T |
|
obr/min |
A |
W |
W |
W |
kpm |
Nm |
1 |
1325 |
8 |
-1140 |
80 |
-1060 |
-1,42 |
-13,93 |
2 |
1222 |
6,8 |
-1000 |
-80 |
-1080 |
-1,35 |
-13,24 |
3 |
1125 |
4,2 |
-700 |
-160 |
-860 |
-0,77 |
-7,55 |
4 |
1033 |
1,9 |
-140 |
60 |
-80 |
-0,26 |
-2,55 |
5 |
915 |
3,1 |
160 |
480 |
640 |
0,45 |
4,41 |
6 |
815 |
5,3 |
240 |
840 |
1080 |
0,77 |
7,55 |
7 |
714 |
6,8 |
200 |
1000 |
1200 |
0,83 |
8,14 |
8 |
603 |
7,7 |
100 |
1100 |
1200 |
0,78 |
7,65 |
9 |
512 |
8,2 |
40 |
1140 |
1180 |
0,72 |
7,06 |
10 |
413 |
8,5 |
-80 |
1160 |
1080 |
0,65 |
6,37 |
11 |
292 |
8,9 |
-140 |
1180 |
1040 |
0,58 |
5,69 |
12 |
195 |
9,1 |
-200 |
1180 |
980 |
0,54 |
5,30 |
13 |
106 |
9,2 |
-220 |
1180 |
960 |
0,54 |
5,30 |
14 |
-50 |
9,4 |
-260 |
1180 |
920 |
0,6 |
5,88 |
15 |
-134 |
9,45 |
-280 |
1160 |
880 |
0,62 |
6,08 |
16 |
-223 |
9,5 |
-300 |
1160 |
860 |
0,6 |
5,88 |
17 |
-301 |
9,6 |
-320 |
1140 |
820 |
0,59 |
5,79 |
18 |
-406 |
9,6 |
-340 |
1140 |
800 |
0,58 |
5,69 |
Z rezystancja dodatkową
U=Uz, Rd=1,5Ω.
l.p. |
n |
I |
Pα |
Pβ |
P |
T |
T |
|
obr/min |
A |
W |
W |
W |
kpm |
Nm |
1 |
1331 |
6,9 |
-1000 |
-40 |
-1040 |
-1,09 |
-10,69 |
2 |
1200 |
4,75 |
-750 |
-140 |
-890 |
-0,75 |
-7,35 |
3 |
1123 |
2,05 |
-300 |
30 |
-270 |
-0,47 |
-4,61 |
4 |
1026 |
2,4 |
70 |
360 |
430 |
-0,11 |
-1,08 |
5 |
920 |
4,8 |
215 |
740 |
955 |
0,019 |
0,19 |
6 |
801 |
6,6 |
180 |
980 |
1160 |
0,49 |
4,81 |
7 |
690 |
7,7 |
80 |
1100 |
1180 |
0,67 |
6,57 |
8 |
605 |
8,3 |
0 |
1140 |
1140 |
0,75 |
7,35 |
9 |
518 |
8,6 |
-70 |
1160 |
1090 |
0,8 |
7,85 |
10 |
377 |
8,9 |
-130 |
1160 |
1030 |
0,82 |
8,04 |
11 |
284 |
9,1 |
-175 |
1170 |
995 |
0,82 |
8,04 |
12 |
170 |
9,2 |
-210 |
1160 |
950 |
0,81 |
7,94 |
13 |
69 |
9,6 |
-190 |
1120 |
930 |
0,61 |
5,98 |
14 |
-50 |
9,45 |
-270 |
1160 |
890 |
0,9 |
8,83 |
15 |
-118 |
9,55 |
-300 |
1160 |
860 |
0,89 |
8,73 |
16 |
-189 |
9,6 |
-315 |
1150 |
835 |
0,88 |
8,63 |
17 |
-280 |
9,55 |
-330 |
1140 |
810 |
0,88 |
8,63 |
18 |
-352 |
9,55 |
-360 |
1100 |
740 |
0,86 |
8,43 |
1 kpm = 9,80665 N · m.
Wykresy:
11. Wnioski
Celem naszego ćwiczenia było badanie silnika pierścieniowego oraz wyznaczenie parametrów schematu zastępczego. Z próby biegu jałowego wyznaczyliśmy elementy gałęzi poprzecznej schematu zastępczego oraz cosၪ. Przy idealnym biegu jałowym straty mechaniczne można pominąć ze względu na ich małą wartość.
Przekładnię wyznaczaliśmy przy rozwartym wirniku zasilając stojan. W obliczeniach należało uwzględnić współczynnik ![]()
ze względu na sposób połączenia wirnika i stojana.
W próbie obciążenia zmienialiśmy moment obciążenia obserwując prędkość obrotową. Charakter obciążenia przedstawia całą charakterystykę pracy maszyny. Stan, kiedy wirnik nie wiruje nazywamy stanem zwarcia. W stanie pracy, kiedy wirnik wirował zgodnie z kierunkiem wirowania pola magnetycznego, ale nie szybciej niż prędkość znamionowa, maszyna pracowała jako silnik osiągając maksymalny moment przy dochodzeniu do prędkości znamionowej. Gdy wirnik wiruje z prędkością znamionową, mówimy że pracuje na biegu jałowym. Po przekroczeniu jej, ale przed osiągnięciem prędkości synchronicznej, moment elektromagnetyczny gwałtownie spada, jest to różnica prędkości wynikająca ze strat mechanicznych. Gdy silnik przekracza prędkość znamionową to znaczy, że moc jest dostarczana na wał, a gdy przekracza prędkość synchroniczną to maszyna pracuje jako generator.
Gdy silnik zaczął kręcić się w przeciwną stronę była to praca hamulcowa silnika.
Na charakterystyce mechanicznej T = f(n) można zauważyć, że włączenie dodatkowej rezystancji w obwodzie wirnika (Rd) spowodowało nieznaczne różnice co do wartości momentu. Włączenie rezystancji spowodowało w czasie rozruchu zmniejszenie prądu i zwiększenie momentu
Praca silnikowa
Praca
prądnicowa
Praca hamulcowa
Wyszukiwarka
Podobne podstrony:
Silnik pierscieniowy
Pomiary parametrów silnika pierścieniowego
Sprawozdanie Silnik pierscieniowy Grzechu
Silnik pierścieniowy , Silnik indukcyjny pier˙cieniowy
Silnik pierścieniowy, Silnik 1f, POLITECHNIKA WARSZAWSKA
Badanie indukcyjnego silnika pierscieniowego v4, LABORATORIUM MASZYN ELEKTRYCNYCH
Wyznaczanie cha-ki silnika pierścieniowego, NAPED-~7, Politechnika Lubelska
ćw17 silnik pierścieniowy z modulatorem rezystancji
Rozruch silnika pierścieniowego
Badanie indukcyjnego silnika pierścieniowego, LABORATORIUM MASZYN ELEKTRYCNYCH
Badanie asynchronicznego silnika pierścieniowego
Badanie silnika pierscieniowego, elektrotechnika
Badanie indukcyjnego silnika pierścieniowego v6
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Elektrotechnika, Napędy
Badanie silnika pierścieniowego A4
Badanie indukcyjnego silnika pierścieniowego
Badanie silnika pierścieniowego
wyznaczanie ch k indukcyjnego silnika pierścieniowego protokoli
więcej podobnych podstron