Wielkości mierzone w geodezji
- kąty poziome i pionowe
- długości - przeważnie pochyłe, pion i poziom
- różnice wysokości
- azymuty - kąty kierunkowe
POMIAR jest to porównanie danej wielkości z
wzorcem polegające na n-krotnym odkładaniu
tego wzorca i odczyt. Jego pełnych
odłożeń i odczyt końcówki(reszty).
Jeśli n-krotność wzorca jest powielona i opisana
to wartość danej wielkości wykonuje się
bezpośrednio z podziału opisanego na stosowanym
przyrządzie oraz końcówki między kreskami wzorca.
DALMIERZE ELEKTROMAGNETYCZNE
Są to przyrządy które wyznaczają dł odcinka AB
Z zastos. Wzorcowej fali EM, kóra rozchodzi się
wzdłuż mierzonego odcin. tam i z powrotem.
Wyznaczenie odl. Wymaga pomiaru czasu przejścia
wzorca tam i z powrotem oraz jego prędkości.
W zależ.i odKSZTAŁTU wzorca faliEM rozróż dalm:
- IMPULSOWE
- FAZOWE
Z/w na dług fali EM rozróż dalmierze:
- MIKROFALOWE
- OPTYCZNE (elektrooptyczne)
Prędkość rozchodzenia się fal EM w próżni równa się
prędk. światła, w powietrzu prędk v=c/v
![]()
DALMIERZE ELEKTROOPTYCZNE
Zmiana temp o 1°C na 1km to 1mm
1mmHg dla dAB=1km daje 0,35mm
Ciśnienie 1/3 poprawki termicznej
Np. Zmiana temp o 1° da ten sam efekt
Co zmiana o 3mmHg ciśnienia
Temp wzrosła o 5°=15mmHg
ZAS. DZIAŁANIA DALM. IMPULSOWYCH
W nadajnikach fala EM jest w formie impulsu o różnym
kształcie(trójkątnym, trapezoidalnym )
Dalmierz wysyła impuls i po określonym czasie wysyła kolejne
Znamy pręd. rozchodzenie się w powietrzu c=300 000km/s
Np. DAB=1km sAB=2km ts=s/c
Dalmierz wykonuje wiele pomiarów i podaje nam wart usredn.
Duże odl. w sek. lub poniżej sekundy
DALMIERZE FAZOWE
Dokładniejsze, stosowane w technice GPS
Wzorcem jest fala harmoniczne(sinusoidalna) optyczna
Odpowiednio zmodulowana (najczęściej)
Równanie fali y=Asin(ωt+φ0) gdzie A- amplituda
ω- częstotl. kołowa t - czas φ0 - faza początkowa
Znając wartość(mierząc) natężenia (sygnału amplitudy)
Potrafimy wyznaczyć wartośc odpowiadającego mu kąta
fazowego ale tylko w zakresie od 0 do 2π
λ=v*t = c/n * T = c/nf
Tłumienie fal następuje w atmosferze czyli bd coraz słabszy,
bo promień optyczny jest pochłaniany a więc jego A maleje.
Fala powracająca jest przesunięta w fazie o wartość
Δφ=ωt +φ0 - ω 2d/v φw - φp
Δφ = n * 2π+ Δφ*
W dalmierzu w jego części nazywamy fazomiarem, mierzona jest
Wartość Δφ* a nie cała wartość kąta Δφ, która jest niemożliwa do
pomiaru ze wzgl technicznych, w związku z tym taki dalmierz w
sposób jednoznaczny pomierzyłby odl w zakresie od 0 do λ/2.
Gdy λ=20m to dalmierz mierzy do 10m
Nie znamy ilości pełnych odłożeń wzorca mierzonej dł a zatem
Nie potrafimy wyznaczyć jednoznacznie mierzonej odl
Aby ta wadę usunąć w dalm fazowych odl AB mierzymy drugi
raz wzorcem fali EM o innej długości.
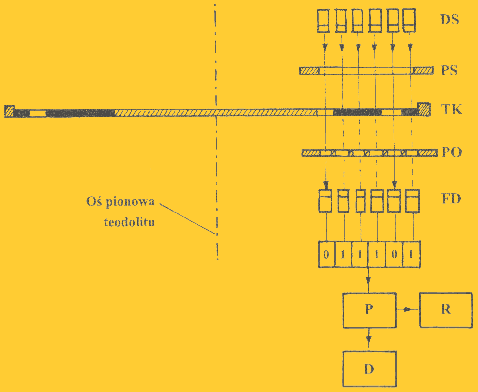
ELEKTRONICZ SYS POMIARU KIERUNKÓW(KĄTÓW)
Każdy system kątomierniczy składa się z dwóch elementów:
a - kręgu kątomierniczego b - systemu odczytowego kręgu
zatem opisanie danego syst. polega opisaniu obu tych elementów.
Pośród wielu syst elektr dla zrozumienia ich działania zastaną opisane
I - System kodowy i dwójkowym kodowym kręgiem kątomierniczym
II - System impulsowy
np. dla dn= 1cc - n=22 ilość działek jasne ciemne
Zwiększenie dokładności odczytów w tym syst zwiększenie
wielkości kręgu, zwiększenie ilości interwałów (ścieżek podziałowych)
co z/w tech napotyka bariery innym rozw jest zróżnicowanie kształtów
interwałowych np. sinusoidalnie.
ZASADA DZIAŁANIA NIWELATORÓW CYFROWYCH (KOD.)
Są to przyrządy które automatyzują wykonanie odczyt na łatach niwelac.
Zasada odczyt. polega na wykonaniu korelacji matematycznej
(z wykorzystaniem rachunku prawdopod) między dwoma obrazami.
Jednym, który jest obrazem wzorcowym kodu łaty zapamiętanym
w mikroprocesorze. Drugim ,który jest obrazem łaty terenowej zrzutowanym
poprzez lunete na matryce CCD i dalej wprowadzonym do mikroprocesora.
W wyniku korelacji wyznaczony zostanie odczyt z łaty oraz odległość.
Z podanej zasady wynika że każdy niwelator cyfrowy musi mieć wbudowaną
Matrycę CCD, mikroprocesor oraz oprogram(algorytm) do wykonywania korelacji
Na wykonywanie odczytów niwelatorami kodowymi mają wpływ
warunki zewnętrzne, takie jak:
-turbulencja powietrza w wysokich temperaturach
-drgania kompensatora wywołane silnym wiatrem
-niejednorodne oświetlenie łaty(w warunkach dołowych
lampa górnicza nie wystarcza, bo światło nie jest równomierne
i oświetla fragment łaty)
-zasłonięcie części łaty (może uniemożliwić pomiar nawet, gdy
zasłonięta jest część łaty, w którą nie celujemy. Widoczne musi
być minimalnie 30 cm łaty) LASERY I ZASTOSOWANIE
jest generatorem światła spójnego,tj takiego które posiada cechy:
- monochromatyczność = const
- duża równoległość, mały kąt robierzności wiązki świetlnej
- spójność tj czasowo-przestrzenne uporządkowanie fotonów
LASERY: czerwone,zielone, niebieskie po lekko fiolet, podczer.
Funkcje laserów: I - wizualizacja przebiegu osi celowej i płaszcz.
- poziomy - niwelatory laserowe
- pionowy - pionowniki laserowe
- dowolnie nachylonych - teodolity laserowe wskaźniki
II - wyznaczanie(sygnalizow) punktu celu na mierzonym obiekcie
III - źródła fali nośnej i wzorcowej dalmierzem (interferometry laserowe)
IV - sterowanie położeniem i kierunkim maszyn(syst laserowe)
SYSTEM GPS I JEGO ZASTOSOWANIE
Zbudowany w USA jako wojskowy system nawigacyjny który dokładnie
rozszerzył swoją funkcj nazastosowanie cywilne w tym geodez.
SKŁADA SIĘ Z 3 SEGMENTÓW
- satelity konstelacje co najmniej 24, aktualnie 30 satelitów
- kontr ośrodek dowodzenia połączony ze stacjami pernam. Ober wszyst sat GPS
-Użytkownicy wszyscy wyposażeni w odbiorniki GPS
Satelity krążą na orbicie 20200km nad ziemią. Rozmieszczone są na 6 kołowych
Orbitach nachylonych wzgl równika pod kątem 55°. Każda orbita różni się
azymutem o 60°. Czas obiegu satwokół Ziemi = 12 godzin
SYGN SATELITY I JEGO STRUKTURA
Składa się z 2 podst częstotliwości L1 i L2 (jednoczęstotliwościowe i dwuczęstot)
Na kóre nałożone są specjalne kody C/A i P oraz pakiet dodatkowych informacji.
Pomiar prowadzony na dwóch częstotl jest prakt wolny od refrakcji jonosferycznej.
Kody zaw w sygn satel wykorzystywane są do pomiaru odl(tzw pseudoodl) satel od
anteny odbiornika. Użytkow. nie wysyła żadnych inf di satel tylko odbiera inf.
Użytkow nie są rozróżniani przez satelity.
POMIAR GPS
Polage na wyznaczeniu odległości od odbiornika satelitarnego do satelity. Można
Go wykonać metodą kodową(pseudoodległość) albo met fazową( pomiar fazowy).
Emisja kodu( w pomiarze kodowy wukorzystuje się fakt,że satelita emituje kod
(C/A lubP) a odbiornik wytwarza identyczny w tych samych określonych
Momentach czasu. Kod który z sygnałem satelitarnym dociera do instrumentu,
Jest przesunięty względem kodu wytworzonego w odbiorniku o czas przebiegu
Sygnału z satelity do anteny. W odbiorniku następuje ponowne przesunięcie
obu kodów względem siebie aż do uzyskania korelacji. Pomierzony w ten
sposób czas pomnażamy przez prędkość rozchodzenia się falu elektromagn.
= mierzonej odl Ziemia - satelita KOD C/A 1,023 KOD P 10,23 na 30cm
METODA FAZOWA polega na pomiarze fazy sygnału dochodzącego
do odbiornika (jak w dalmierzu)
Syst GPS jest tak skonstruowany aby każdy okt na pow Ziemi można było
Ober przynajmniej 4 satelit pomierzyć odl do 4 satelitów, których położenie
W przestrzeni znamy. Stąd wnioskujemy, że po9łożenie anteny naszego
odbiornika GPS wyznaczony na podst przestrzennego wcięcia wstecz.
Geometrycznie rzecz rozważając mamy tu do czynienia z metodą „trysfenacji”
Wyznaczamy pkt(odbiornik GPS) lezy na przecięciu 3 kul zataczających ze
znanych w przestrzeni położeń satelitów promieniowi równym pomierzonym
odległości Ziemi. W zadaniu wyznacz. współrz. Przestrzennych stanowiska
tech. satelitarnymi GPS wyst. 4 niewiadome X,Y,Z oraz wyzn. Δt oznaczający
synchronizację zegara w odbiorniku do czasu GPS STĄD 4 satelity
(x - a)2+(y - b)2+(y - c)2 = r2 a,b,c - odbiornik współrz x,y,z - satelity współrz
ZASADA DZIAŁANIA NIWELATORÓW CYFROWYCH (KOD.)
Są to przyrządy które automatyzują wykonanie odczyt na łatach niwelac.
Zasada odczyt. polega na wykonaniu korelacji matematycznej
(z wykorzystaniem rachunku prawdopod) między dwoma obrazami.
Jednym, który jest obrazem wzorcowym kodu łaty zapamiętanym
w mikroprocesorze. Drugim ,który jest obrazem łaty terenowej zrzutowanym
poprzez lunete na matryce CCD i dalej wprowadzonym do mikroprocesora.
W wyniku korelacji wyznaczony zostanie odczyt z łaty oraz odległość.
Z podanej zasady wynika że każdy niwelator cyfrowy musi mieć wbudowaną
Matrycę CCD, mikroprocesor oraz oprogram(algorytm) do wykonywania korelacji
Na wykonywanie odczytów niwelatorami kodowymi mają wpływ
warunki zewnętrzne, takie jak:
-turbulencja powietrza w wysokich temperaturach
-drgania kompensatora wywołane silnym wiatrem
-niejednorodne oświetlenie łaty(w warunkach dołowych
lampa górnicza nie wystarcza, bo światło nie jest równomierne
i oświetla fragment łaty)
-zasłonięcie części łaty (może uniemożliwić pomiar nawet, gdy
zasłonięta jest część łaty, w którą nie celujemy. Widoczne musi
być minimalnie 30 cm łaty)
LASERY I ZASTOSOWANIE
jest generatorem światła spójnego,tj takiego które posiada cechy:
- monochromatyczność = const
- duża równoległość, mały kąt robierzności wiązki świetlnej
- spójność tj czasowo-przestrzenne uporządkowanie fotonów
LASERY: czerwone,zielone, niebieskie po lekko fiolet, podczer.
Funkcje laserów: I - wizualizacja przebiegu osi celowej i płaszcz.
- poziomy - niwelatory laserowe
- pionowy - pionowniki laserowe
- dowolnie nachylonych - teodolity laserowe wskaźniki
II - wyznaczanie(sygnalizow) punktu celu na mierzonym obiekcie
III - źródła fali nośnej i wzorcowej dalmierzem (interferometry laserowe)
IV - sterowanie położeniem i kierunkim maszyn(syst laserowe)
SYSTEM GPS I JEGO ZASTOSOWANIE
Zbudowany w USA jako wojskowy system nawigacyjny który dokładnie
rozszerzył swoją funkcj nazastosowanie cywilne w tym geodez.
SKŁADA SIĘ Z 3 SEGMENTÓW
- satelity konstelacje co najmniej 24, aktualnie 30 satelitów
- kontr ośrodek dowodzenia połączony ze stacjami pernam. Ober wszyst sat GPS
-Użytkownicy wszyscy wyposażeni w odbiorniki GPS
Satelity krążą na orbicie 20200km nad ziemią. Rozmieszczone są na 6 kołowych
Orbitach nachylonych wzgl równika pod kątem 55°. Każda orbita różni się
azymutem o 60°. Czas obiegu satwokół Ziemi = 12 godzin
SYGN SATELITY I JEGO STRUKTURA
Składa się z 2 podst częstotliwości L1 i L2 (jednoczęstotliwościowe i dwuczęstot)
Na kóre nałożone są specjalne kody C/A i P oraz pakiet dodatkowych informacji.
Pomiar prowadzony na dwóch częstotl jest prakt wolny od refrakcji jonosferycznej.
Kody zaw w sygn satel wykorzystywane są do pomiaru odl(tzw pseudoodl) satel od
anteny odbiornika. Użytkow. nie wysyła żadnych inf di satel tylko odbiera inf.
Użytkow nie są rozróżniani przez satelity.
POMIAR GPS
Polage na wyznaczeniu odległości od odbiornika satelitarnego do satelity. Można
Go wykonać metodą kodową(pseudoodległość) albo met fazową( pomiar fazowy).
Emisja kodu( w pomiarze kodowy wukorzystuje się fakt,że satelita emituje kod
(C/A lubP) a odbiornik wytwarza identyczny w tych samych określonych
Momentach czasu. Kod który z sygnałem satelitarnym dociera do instrumentu,
Jest przesunięty względem kodu wytworzonego w odbiorniku o czas przebiegu
Sygnału z satelity do anteny. W odbiorniku następuje ponowne przesunięcie
obu kodów względem siebie aż do uzyskania korelacji. Pomierzony w ten
sposób czas pomnażamy przez prędkość rozchodzenia się falu elektromagn.
= mierzonej odl Ziemia - satelita KOD C/A 1,023 KOD P 10,23 na 30cm
METODA FAZOWA polega na pomiarze fazy sygnału dochodzącego
do odbiornika (jak w dalmierzu)
Syst GPS jest tak skonstruowany aby każdy okt na pow Ziemi można było
Ober przynajmniej 4 satelit pomierzyć odl do 4 satelitów, których położenie
W przestrzeni znamy. Stąd wnioskujemy, że po9łożenie anteny naszego
odbiornika GPS wyznaczony na podst przestrzennego wcięcia wstecz.
Geometrycznie rzecz rozważając mamy tu do czynienia z metodą „trysfenacji”
Wyznaczamy pkt(odbiornik GPS) lezy na przecięciu 3 kul zataczających ze
znanych w przestrzeni położeń satelitów promieniowi równym pomierzonym
odległości Ziemi. W zadaniu wyznacz. współrz. Przestrzennych stanowiska
tech. satelitarnymi GPS wyst. 4 niewiadome X,Y,Z oraz wyzn. Δt oznaczający
synchronizację zegara w odbiorniku do czasu GPS STĄD 4 satelity
(x - a)2+(y - b)2+(y - c)2 = r2 a,b,c - odbiornik współrz x,y,z - satelity współrz
Wyszukiwarka
Podobne podstrony:
Ściąga z geomorfologii, AGH, rok I
sciaga 2(1), Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
sciaga kolo 4-5, agh, III rok
Hydrologia ściąga egzamin, Ochrona Środowiska AGH, 2 rok, Hydrogeologia
chemia sciaga egzamin, II Rok WIMiC inżynieria materiałowa AGH, Chemia, Chemia -, Chemia - Laborki,
Nowak sciaga moja, AGH. kier. GiG. rok 4 sem 7, semestr VII, wentylacja
sciaga surowce, Agh kier. gig. rok 3 sem 6, gospodarka surowcami mineralnymi
automatyka sciaga, Akademia Morska, 2 rok', Semestr IV, Automatyka
Wyznaczenie długości pionowego odcinka niedostępnego - obliczenia, Studia, AGH, Rok II, geodezja II,
Zestaw Fiz.wsp, AGH, ROK I, fizyka, Fizyka
Lepkość-sciaga, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki,
Ściąga ekonomia zeszły rok
Pytania z Kartografii Egamin 2010, Ochrona Środowiska AGH, 2 rok, Kartografia geologiczna
2BGG1 K zad4, Studia GiG agh, Rok II, Geomechanika
tematy do projektu, AGH, ROK II, AGH, PKM, PROJEKT, szpanersworze
IMMUNO nowa - sciaga, STOMATOLOGIA, III ROK, Patomorfologia
więcej podobnych podstron