Ćwiczenie 26
Mierniki cyfrowe
Cel ćwiczenia
Celem ćwiczenia jest poznanie zasady działania i obsługi wybranych mierników cyfrowych.
Program ćwiczenia
1. Podstawy teoretyczne
1.1. Wstęp
1.2. Pomiar częstotliwości i czasu
1.3. Pomiar napięcia stałego
1.4. Pomiar napięcia zmiennego
1.5. Pomiar prądu stałego i zmiennego
1.6. Pomiar rezystancji
1.7. Błędy mierników cyfrowych
2. Wykonanie pomiarów
2.1. Multimetr cyfrowy
2.1.1. Przygotowanie przyrządu do pracy
2.1.2. Pomiar napięcia stałego
2.1.3. Pomiar prądu stałego
2.1.4. Pomiar wartości średniej napięcia zmiennego
2.1.5. Pomiar współczynnika kształtu prądu zmiennego
2.1.6. Pomiar rezystancji
2.2. Częstościomierz cyfrowy
2.2.1. Sprawdzenie przyrządu
2.2.2. Pomiar częstotliwości
2.2.3. Wykorzystanie częstościomierza jako źródła częstotliwości wzorcowych
3. Uwagi i wnioski
1.1. Wstęp
Miernikiem elektronicznym nazywa się taki układ pomiarowy, w którym sygnał wejściowy zawierający informację o wielkości mierzonej zostaje zamieniony na sygnał elektryczny podlegający procesowi obróbki w układach elektronicznych, a następnie przetworzony na wartość liczbową wielkości mierzonej. Wyróżniamy dwa rodzaje elektronicznych przyrządów pomiarowych: analogowe i cyfrowe. W przyrządach analogowych elementem wskazującym jest najczęściej klasyczny miernik wskazówkowy (np. mikroamperomierz magnetoelektryczny) wyskalowany w jednostkach wielkości mierzonej. Mierniki cyfrowe pozwalają na bezpośredni odczyt wartości wielkości mierzonej ze wskaźnika cyfrowego lub z rejestratorów (np. drukarki), dzięki czemu unika się błędu popełnianego przy odczycie wskazań. Główną zaletą mierników cyfrowych jest ich duża dokładność. Ponadto mają one w porównaniu z przyrządami analogowymi następujące zalety: dużą szybkość pomiarów, automatyczny wybór polaryzacji, możliwość automatycznego wyboru zakresu, łatwość rejestracji czy „zapamiętywania” wyników pomiarów oraz możliwość współpracy z komputerowymi systemami pomiarowo-kontrolnymi i sterującymi. Cyfrowe metody pomiarowe mogą być zastosowane do pomiaru niemal wszystkich wielkości fizycznych zarówno elektrycznych, jak i nieelektrycznych, dyskretnych (ziarnistych) i ciągłych. Jeżeli mierzona wielkość fizyczna ma charakter ciągły, to w przyrządzie musi być dokonane tzw. przetwarzanie analogowo-cyfrowe, czyli zamiana wielkości ciągłej na dyskretną. W wyniku tej zamiany otrzymuje się proporcjonalna do wielkości mierzonej, liczbę impulsów elektrycznych zliczana przez licznik i prezentowana na wskaźniku cyfrowym lub drukarce.
Ze względu na stosowaną metodę przetwarzania rozróżniamy przyrządy cyfrowe z miarą czasu lub miarą napięcia. W pierwszej z wymienionych grup jednostkę czasu wyznacza okres drgań generatora wzorcowego, w drugiej zaś jednostkę napięcia zmieniające się skokowo napięcie wyjściowe specjalnego typu generatora napięcia. Przedmiotem dalszych rozważań są mierniki cyfrowe wykorzystujące przetwarzanie A/C z miarą czasu. Podstawowym pomiarem w tej klasie przyrządów jest pomiar częstotliwości (lub czasu). Wynika stąd podział miernika cyfrowego na dwie zasadnicze części. W pierwszej - mierzona wartość jest transformowana na częstotliwość lub czas, w drugiej - czas lub częstotliwość są mierzone metodą zliczania impulsów.
1.2. Pomiar częstotliwości i czasu
Cyfrowy pomiar częstotliwości opiera się na metodzie zliczania impulsów uformowanych z przebiegu okresowego o częstotliwości fx w ściśle określonym wzorcowym przedziale czasu Tp. Schemat blokowy częstościomierza wykorzystującego powyższą metodę przedstawiono na rys.1.
Cykl pracy układu jest następujący. Układ sterujący powoduje zerowanie licznika (skasowanie poprzedniego stanu) po czym otwiera bramkę na czas Tp określony przez aktualnie wybrany przełącznikiem P zakres pomiarowy. Źródłem częstotliwości wzorcowych jest generator kwarcowy wraz z dzielnikiem częstotliwości. Impulsy o częstotliwości mierzonej fx przekazywane są na czas otwarcia bramki elektronicznej (Tp) do licznika, gdzie są zliczane. Liczba zliczonych impulsów n w czasie Tp jest proporcjonalna do częstotliwości mierzonej:
![]()
(1)
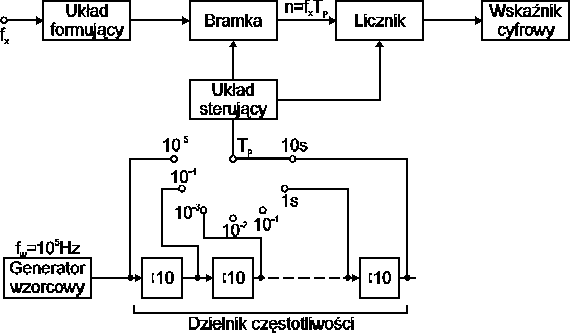
Rys.1. Schemat blokowy częstościomierza cyfrowego.
Błąd względny pomiaru częstotliwości omawianą metodą wyraża się wzorem:
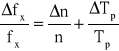
(2)
w którym:
![]()
- błąd względny zliczania,
![]()
- błąd względny odmierzania wzorcowego przedziału czasowego
Uwzględniając, że dla liczników cyfrowych błąd bezwzględny odczytu równy jest ![]()
cyfra (n=1) oraz, że Tp jest odwrotnie proporcjonalny do częstotliwości generatora wzorcowego (fw) otrzymuje się z zależności (2) wzór:
(3)
Ze wzoru (3) wynika, że przy pomiarze małych częstotliwości należy stosować zwiększony czas pomiaru Tp. I tak przykładowo przy pomiarze częstotliwości fx=1kHz - w celu zapewnienia błędu względnego zliczania równego 0,1% - należy dobrać Tp=1s, zaś dla fx=100Hz - Tp=10s.
Z punktu widzenia użytkownika częstościomierza cyfrowego istotne są następujące parametry techniczne: rezystancja wejściowa, pasmo przenoszenia oraz minimalny sygnał wejściowy zapewniający poprawną pracę przyrządu.
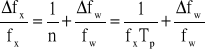
Cyfrowy pomiar czasu odbywa się na zasadzie pomiaru liczby impulsów generatora wzorcowego o znanym okresie Tw. Schemat blokowy czasomierza cyfrowego oraz przebiegi czasowe podano na rys.2.
Impulsy elektryczne ograniczające odstęp mierzonego czasu t podawane są na wejścia układów formujących I i II. Mogą być one wytworzone automatycznie przez układ, w którym odstęp czasu mierzymy, bądź też przez osobę wykonującą pomiar. Impuls określający początek liczenia (t1) oraz impuls kończący liczenie (t2) wyznaczają - poprzez układ sterujący bramką - szerokość impulsu bramkującego równą czasowi mierzonemu t. Wobec tego:
![]()
(4)
gdzie: n - liczba impulsów wzorcowych zliczana przez licznik
Czas mierzony jest wielokrotnością okresu Tw generatora wzorcowego równej 100MHz, wartość rozdzielczości czasu mierzonego wynosi 10-8s. Maksymalna wartość czasu mierzonego zależy od pojemności licznika No i od okresu Tw impulsów wzorcowych, przy czym:
![]()
(5)
Dla stałej pojemności licznika No wartość tmax może być regulowana przez zmianę częstotliwości generatora impulsów wzorcowych. w tym celu generator powinien zawierać układy umożliwiające podział lub powielanie częstotliwości.
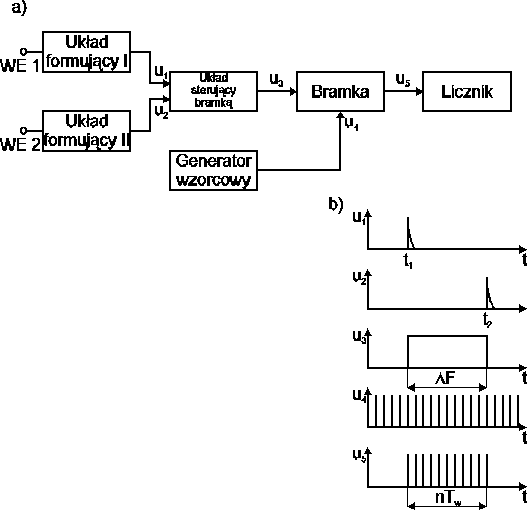
Rys.2. Cyfrowy miernik odstępu czasu
a) schemat blokowy
b) przebiegi
1.3. Pomiar napięcia stałego
Stosowane obecnie woltomierze cyfrowe wykorzystujące przetwarzanie analogowo-cyfrowe z miarą czasu można podzielić na trzy grupy:
woltomierze impulsowo-czasowe
woltomierze całkujące z przetwarzaniem napięcie-częstotliwość
woltomierze całkujące z przetwornikiem napięcie-czas zwane również woltomierzami o podwójnym całkowaniu
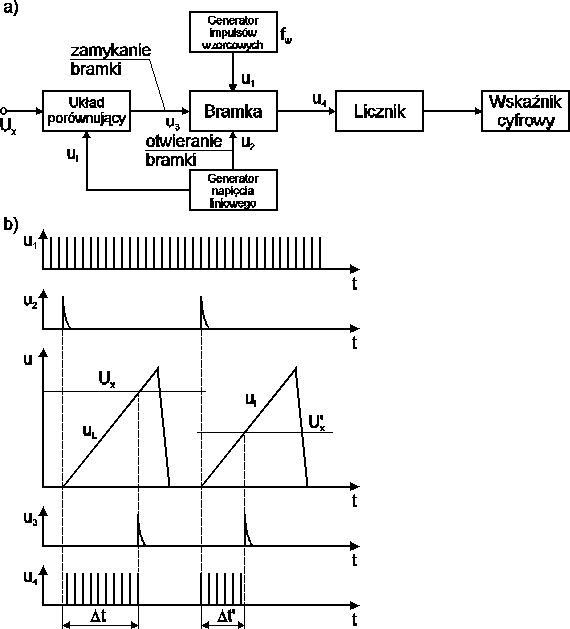
Najprostszym układowo jest woltomierz cyfrowy z przetwarzaniem impulsowo-czasowym. Istotą pomiaru jest przetwarzanie napięcia na czas. Schemat blokowy woltomierza tego typu przedstawiono na rys.3.
Rys.3. Woltomierz cyfrowy z przetwarzaniem napięcie-czas
a) schemat blokowy
b) przebiegi wyjaśniające zasadę pomiaru
Napięcie mierzone Ux jest porównywane w układzie porównującym z napięciem narastającym liniowo uL, wytwarzanym w specjalnym generatorze. W chwili zrównania się napięć Ux oraz uL na wyjściu układu porównującego pojawia się impuls u3 zamykający bramkę elektroniczną. Otwarcie bramki następuje jednocześnie ze startem generatora napięcia liniowego (impuls u2). Przez otwarta bramkę w czasie t przechodzą impulsy wytwarzane prze generator impulsów wzorcowych, które są zliczane przez licznik. Przy odpowiednim doborze szybkości narastania napięcia liniowego, częstotliwości impulsów wzorcowych wartość mierzonego napięcia może być bezpośrednio odczytana ze stanu licznika na wskaźniku cyfrowym. Jeżeli przez n oznaczymy liczbę impulsów zliczonych przez licznik w czasie t, zaś przez fw częstotliwość impulsów wzorcowych to spełnione jest równanie:
![]()
(6)
gdzie: - nachylenie napięcia liniowego [V/s]
Jeżeli wybrać k=10c, gdzie c jest liczbą całkowitą to cyfry wskazywane przez licznik będą jednocześnie cyframi znaczącymi mierzonego napięcia.
Pomiar napięcia odbywa się cyklicznie. Jest on powtarzany automatycznie z częstotliwością (15)Hz. Częstotliwość generatora impulsów wzorcowych wynosi najczęściej 100kHz, 200kHz lub 1MHz. Woltomierze tego typu są stosunkowo mało dokładne (do 0,1%) i wrażliwe na zakłócenia.
W opisanym powyżej woltomierzu cyfrowym, mierzona jest wartość napięcia w chwili jego skompensowania napięciem wzorcowym zmieniającym się liniowo. Wobec tego, w przypadku, gdy chwilowa wartość napięcia zmienia się w czasie trwania pomiaru, np. wskutek przypadkowych zakłóceń, powstaje dodatkowy błąd pomiaru. Wady tej nie posiadają woltomierze całkujące, które mierzą średnią wartość napięcia w określonym przedziale czasowym.
W woltomierzu całkującym z przetwarzaniem napięcie-częstotliwość przedstawionym na rys.4 układ przetwarzania składa się z integratora (układu całkującego), układu porównującego i generatora ładunku kompensacyjnego. Działanie układu jest następujące: napięcie mierzone Ux doprowadzone do wejścia integratora wywołuje na jego wyjściu przebieg napięcia narastającego liniowo o szybkości narastania proporcjonalnej do wartości Ux. Gdy napięcie liniowe osiągnie wartość napięcia odniesienia Up=const, układ porównujący wysyła impuls uruchamiający generator ładunku kompensacyjnego, który powoduje szybkie rozładowanie kondensatora C i powrót integratora do stanu początkowego. Od tej chwili następuje ponowne całkowanie napięcia wejściowego i cykl się powtarza. Każdorazowemu rozładowaniu kondensatora towarzyszy wytworzenie impulsu u1, który poprzez bramkę elektroniczną jest przekazywany do licznika. Im większą wartość ma napięcie mierzone Ux, tym wyższa jest szybkość narastania napięcia liniowego, a zatem większa częstotliwość zliczanych impulsów ![]()
. Pomiar częstotliwości odbywa się metodą opisaną w p.1.2 przez zliczanie impulsów w określonym przedziale czasowym Tp. Przedział czasowy Tp zadaje generator czasu pomiaru, sterując otwieranie bramki.
Uśrednianie napięcia mierzonego w woltomierzu całkującym powoduje wydatne zmniejszenie wpływu zakłóceń na dokładność pomiaru. I tak przykładowo, dla przypadku zakłócenia napięcia mierzonego napięciem przemiennym np. sinusoidalnym, wartość średnia napięcia mierzonego będzie wynosiła:
Uxśr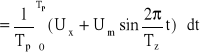
(7)
Jeżeli czas pomiaru Tp będzie równy okresowi przebiegu zakłócającego Tz, to Uxśr=Ux, co oznacza, że chwilowa wartość napięcia stałego mierzonego może ulec zmianie, lecz zmiany te nie wpływają na wynik pomiaru.
Osobną grupę woltomierzy całkujących stanowią woltomierze o podwójnym całkowaniu. Zasadę działania woltomierza tego typu ilustruje rys.5. pomiar składa się z dwóch cykli. Pierwszy, zwany pierwszym całkowaniem, rozpoczyna się z chwilą doprowadzenia do wejścia integratora napięcia mierzonego Ux. Napięcie na wyjściu integratora narasta wtedy liniowo z szybkością proporcjonalną do wartości Ux, a jednocześnie startuje generator częstotliwości wzorcowej, który odmierza czas całkowania Tp. Czas jest stały (Tp=const) niezależnie od wartości mierzonego napięcia. po upływie czasu Tp rozpoczyna się drugi cykl pomiaru (drugie całkowanie). Układ sterujący wysyła impuls przełączający wejście integratora na źródło napięcia wzorcowego o stałej wartości Up=const lecz o przeciwnej do napięcia Ux biegunowości. Jednocześnie otwiera się bramka, przez którą impulsy z generatora częstotliwości wzorcowej fw doprowadzane są do licznika, gdzie rozpoczyna się ich zliczanie. Napięcie na wyjściu integratora maleje z szybkością proporcjonalną do wartości napięcia Up wskutek rozładowywania się kondensatora C. W chwili, w której napięcie wyjściowe osiąga wartość zerową, kończy się drugi cykl pomiarowy. Chwila ta jest wykrywana w układzie porównującym, który wysyła impuls zamykający bramkę. Pomiar napięcia omawianą metodą sprowadza więc do porównania dwu całek:
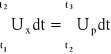
(8)
czyli dwu wyrażeń:
![]()
(9)
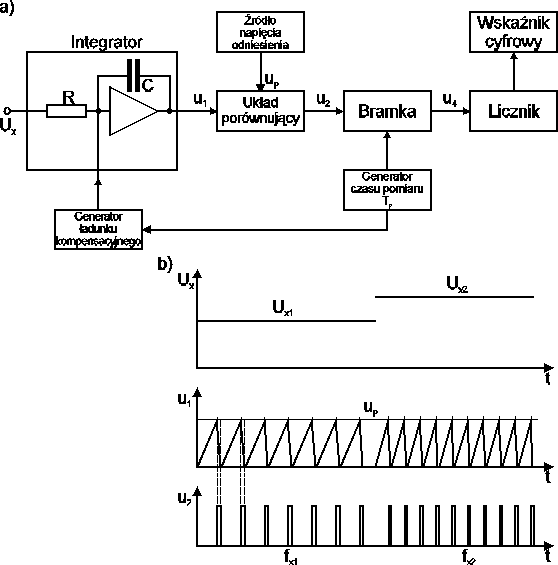
Rys.4.Woltomierz cyfrowy całkujący z przetwarzaniem napięcie-częstotliwość
a) schemat blokowy
b) przebiegi
Ze wzoru (9) wynika, że:

(10)
Tak więc czas zliczania impulsów Tx, a więc i liczba zliczonych impulsów n=fxTx są wprost proporcjonalne do wartości mierzonego napięcia Ux. Wynik pomiaru jest wyświetlany na wskaźniku cyfrowym.Metoda podwójnego całkowania ma w porównaniu z innymi metodami jedną poważną zaletę: otóż oba napięcia Ux i Up porównywane są tym samym zestawem bloków. Stąd dokładność wykonania tych bloków oraz stałość ich parametrów w czasie nie grają już tak ważnej roli jak w układzie o całkowaniu pojedynczym.
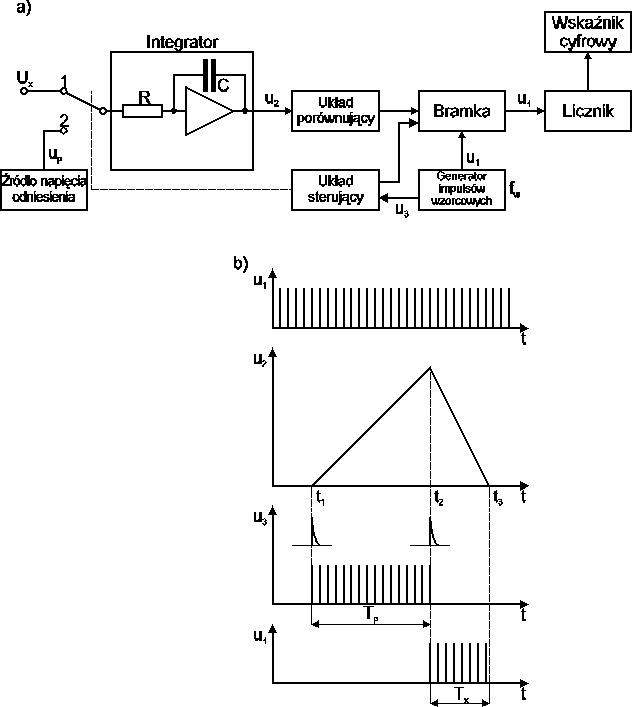
Rys.5. Woltomierz cyfrowy o podwójnym całkowaniu
a) schemat blokowy
b) przebiegi wyjaśniające zasadę pomiaru
1.4. Pomiar napięcia zmiennego
Woltomierze cyfrowe do pomiaru napięć zmiennych mają dodatkowe układy przetwarzające napięcie zmienne na napięcie stałe. Ze względu na trudności w opracowaniu wysokiej klasy przetworników wartości skutecznej napięcia zmiennego na stałe, znaczna część produkowanych woltomierzy cyfrowych przystosowana jest do pomiaru wartości średniej lub szczytowej napięcia. Problem pomiarów napięć zmiennych woltomierzami cyfrowymi sprowadza się zatem do budowy określonego typu przetworników i ich współpracy z woltomierzami napięć stałych.
ze względu na dużą dokładność metod cyfrowych w porównaniu z metodami analogowymi, układy prostowania stosowane w woltomierzach analogowych są niewystarczające z powodu silnej nieliniowości charakterystyki przejściowej dla małych napięć. W pomiarach cyfrowych wymaga się, aby charakterystyka prostowania była ściśle liniowa od napięć rzędu kilku miliwoltów.
Wymagania stawiane przetwornikom wartości średniej przeznaczonych do współpracy z miernikami cyfrowymi spełniają układy wzmacniaczy operacyjnych, które w pętli sprzężenia zwrotnego mają włączone diody półprzewodnikowe. Przykładowy schemat prostownika jednopołówkowego zbudowanego na tej zasadzie przedstawiono na rys.6. Układ ten dla ujemnej połówki napięcia wejściowego pracuje jako wzmacniacz odwracający o wzmocnieniu wyznaczonym przez stosunek rezystorów R2/R1. Dioda D1 wówczas przewodzi, D2 jest zablokowana. Spadek napięcia na przewodzącej diodzie jest zredukowany w stosunku wynikającym ze wzmocnienia układu z otwartą pętlą. Dla dodatniej połówki napięcia wejściowego dioda D1 przestaje przewodzić, przewodzi natomiast dioda D2. Napięcie wyjściowe bliskie jest wówczas zeru (z dokładnością lepszą niż 12mV). Układ realizuje więc funkcję diody idealnej.
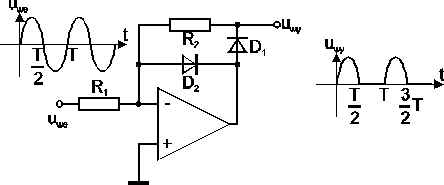
Rys.6. Jednopołówkowy prostownik idealny.
Z wyjątkiem wymagań specjalnych, ogólnie przyjętą zasadą jest pomiar wartości skutecznej przebiegów zmiennych. Rzeczywiste układy pomiarowe działają na zasadzie przetwarzania wartości średniej bądź szczytowej napięcia zmiennego, skalowane są natomiast w wartości skutecznej, przeliczanej dla sygnału sinusoidalnego. Praktycznie więc właściwa dokładność wskazań mierników cyfrowych - w odniesieniu do wartości skutecznej - jest zapewniona przy pomiarach nie zniekształconego napięcia sinusoidalnego. Przykładowo rozpatrzmy przypadek, gdy na wejście cyfrowego woltomierza napięcia zmiennego z przetwornikiem wartości średniej, wyskalowanego w wartości skutecznej dla sygnału sinusoidalnego, podamy napięcia o przebiegach jak na rys.7.
Wskazanie woltomierza wynosi:
![]()
(11)
gdzie współczynnik równy 1,11 odpowiada wartości współczynnika kształtu dla przebiegu sinusoidalnego. Wskazania woltomierza dla przykładowych przebiegów będą więc równe UV=0,555Um dla przebiegu trójkątnego oraz UV=0,666Um dla przebiegu prostokątnego. Ze wzoru (11) wynika, że dla napięcia odkształconego możliwe jest tylko określenie jego wartości średniej równej Uśr=UV/1,11.
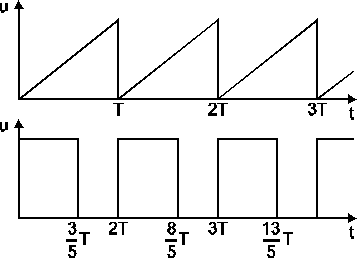
Rys.7. Przebiegi napięć zmiennych do przykładu w tekście
1.5. Pomiar prądu stałego i zmiennego
Pomiar prądu stałego i zmiennego metodami cyfrowymi polega na pomiarze spadku napięcia na wzorcowej rezystancji, a więc tak samo jak w przypadku metod analogowych. Typowy przykład rozwiązania dzielnika wejściowego do pomiaru prądu, przedstawiona na rys.8. Zespół połączonych rezystorów wzorcowych współpracuje z woltomierzem cyfrowym o dużej rezystancji wejściowej. Z punktu widzenia walorów użytkowych miernika, jest istotne aby spadek napięcia na rezystancji był możliwie mały. Wartość tego spadku wynika z podstawowego zakresu pomiarowego woltomierza. Dla przykładu przedstawionego na rys.8 wynosi ona 100mV.
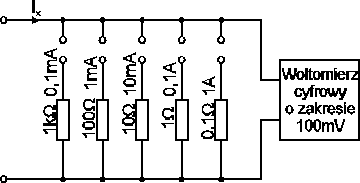
Rys.8. Zasada pomiaru natężenia prądu metodą cyfrową.
1.6. Pomiar rezystancji
Spośród wielu metod stosowanych przy pomiarze rezystancji, w miernikach cyfrowych spotykana jest zasadniczo jedna, polegająca na przetwarzaniu rezystancji na proporcjonalne do niej napięcie stałe, mierzone następnie za pomocą woltomierza cyfrowego. Zasada przetwarzania rezystancji na napięcie (R/U) opiera się na prawie Ohma. Oznacza to, że jest mierzony spadek napięcia na nieznanej rezystancji, wymuszony przepływem prądu o dokładnie znanej wartości (rys.9). Zasadniczym problemem jest przy tym uzyskanie stałego prądu o wartości niezależnej od zmian obciążenia i czynników zakłócających. Najczęściej do budowy źródeł prądowych wykorzystuje się wzmacniacze operacyjne, na których wejścia podawane jest stabilizowane napięcie odniesienia UR. Przykładowe układy źródeł prądowych tego typu podano na rys.10.
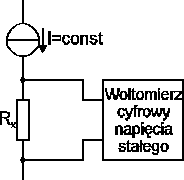
Rys.9. Zasada pomiaru rezystancji metodą przetwarzania R/U
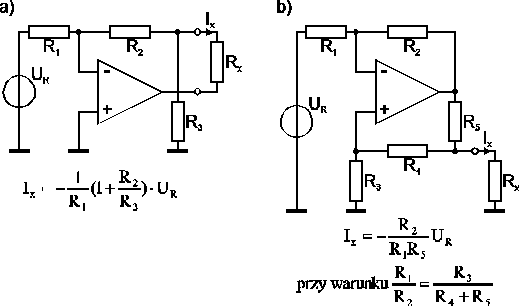
Rys.10. Podstawowe układy źródeł prądowych ze wzmacniaczami operacyjnymi
1.7. Błędy mierników cyfrowych
W przyrządach cyfrowych dokładność pomiaru określona jest przez:
błąd wielkości wzorcowej - wynika on np. w woltomierzu impulsowo-czasowym z nieliniowości i niestałości szybkości zmian napięcia narastającego liniowo oraz niestabilność częstotliwości generatora impulsów,
błąd porównania - wynika on ze skończonej czułości układów porównujących i określany jest progiem czułości,
błąd dyskretyzacji - przyjmuje się równy 1 najmniej wartościowej pozycji cyfrowego wyniku pomiaru.
W związku z tym dla mierników cyfrowych o dużej dokładności określa się niedokładność podając trzy liczby:
procentowy błąd graniczny liczony od wartości końca zakresu (wynika z błędu wielkości wzorcowej)
procentowy błąd graniczny liczony od wartości aktualnej (odpowiada błędowi porównania)
bezwzględny błąd dyskretyzacji (1 jednostka na ostatniej pozycji wyniku)
W miernikach o mniejszej dokładności i rozdzielczości wzorzec wewnętrzny jest zwykle o tyle dokładniejszy od wskazań przyrządu, że wystarcza podanie granicznego błędu procentowego liczonego względem aktualnych wskazań i błędu dyskretyzacji. Rozpatrzmy przykładowo woltomierz o zakresie 3,999V i niedokładności równej: 0,1% wartości mierzonej 1 jednostka. Obliczmy błąd graniczny pomiaru dla wskazania woltomierza wynoszącego U=0,585V. Błąd względny dyskretyzacji wynosi więc:
![]()
Tak więc łączny błąd graniczny ma wartość:
![]()
Przy pomiarach wielkości ziarnistych (częstościomierze, czasomierze) na niedokładność pomiaru mają wpływ: błąd częstotliwości generatora kwarcowego w czasie i przy zmianach temperatury 
oraz czas pomiaru (tp) przy czym procentowy błąd określa wzór:
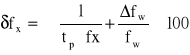
gdzie: 1[tp]=1s, 1[fx]=1Hz
2. Wykonanie pomiarów
2.1. Multimetr cyfrowy
2.1.1. Przygotowanie przyrządu do pracy
Po włączeniu przyrządu do sieci należy:
sprawdzić wskazanie przyrządu przy zwartych gniazdach wejściowych (błąd zera),
sprawdzić cechowanie przetwornika A/C (kalibracja przyrządu),
wyznaczyć czas powtarzania pomiaru.
2.1.2. Pomiar napięcia stałego
Pomierzyć napięcia wyjściowe zasilacza stabilizowanego. Wyniki pomiarów zestawić w tablicy1.
Tablica 1
Napięcie znamionowe |
V |
+5 |
-5 |
+12 |
-12 |
+15 |
-15 |
Napięcie pomierzone |
V |
|
|
|
|
|
|
2.1.3. Pomiar prądu stałego
Połączyć układ jak na rys.11.
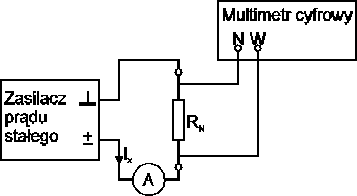
Rys.11. Układ do pomiaru prądu stałego
A - amperomierz elektrodynamiczny
RN - rezystor wzorcowy
Wartość prądu mierzonego należy obliczyć ze wzoru:

gdzie: UV - wskazanie woltomierza cyfrowego
RN - rezystancja rezystora wzorcowego
Należy obliczyć graniczną wartość błędu pomiaru prądu na podstawie wzoru:
![]()
gdzie: δIx - procentowy błąd pomiaru prądu
δUV - procentowy błąd woltomierza cyfrowego
δRN - klasa rezystora wzorcowego
2.1.4. Pomiar wartości średniej napięcia zmiennego
Badany multimetr przetwarza wartość średnią modułu mierzonego napięcia. Należy sprawdzić współczynnik skalowania wyniku tzn. stosunek wskazania woltomierza do wartości średniej. W tym celu należy połączyć układ jak na rys.12.
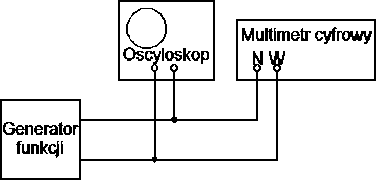
Rys.12. Układ do pomiaru wartości średniej napięcia zmiennego
Sprawdzenie przeprowadzić dla dwu typów przebiegów napięcia:
a) trójkątnego i b) prostokątnego. Dla każdego z przebiegów ustawić składową stałą równą zero i wartość międzyszczytową równą Upp=.....V. Obliczyć współczynnik skali ze wzorów:

dla przebiegu trójkątnego

dla przebiegu prostokątnego
2.1.5. Pomiar współczynnika kształtu prądu zmiennego
Połączyć układ jak na rys.13.
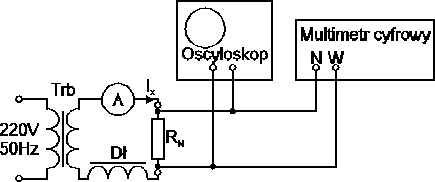
Rys.13. Układ do pomiaru wartości średniej i współczynnika kształtu prądu
Trb - transformator bezpieczeństwa
A - amperomierz elektrodynamiczny
Dł - dławik
RN - rezystor wzorcowy
Pomierzyć wartość skuteczną prądu Ix amperomierzem oraz wartość średnią Ixśr za pomocą układu: rezystor wzorcowy - woltomierz cyfrowy. Współczynnik kształtu obliczyć ze wzoru:
![]()
Narysować, zaobserwowany na ekranie oscyloskopu, przebieg chwilowy prądu mierzonego.
2.1.6. Pomiar rezystancji
Pomierzyć multimetrem cyfrowym rezystancję rezystora dekadowego w zakresie od Rmin=.....k do Rmax=.....k.
Wyniki zestawić w tablicy 2.
Tablica 2
Rezystancja nastawiona |
k |
|
|
|
|
|
|
|
|
|
Rezystancja pomierzona |
k |
|
|
|
|
|
|
|
|
|
2.2. Częstościomierz cyfrowy
2.2.1. Sprawdzanie przyrządu
Sprawdzanie przyrządu polega na pomiarze jego własnych częstotliwości wzorcowych. Przełącznik KONTROLA-POMIAR ustawić w pozycji KONTROLA (klawisz wciśnięty). Następnie należy dla poszczególnych nastaw czasu pomiaru (0,01s, 0,1s, 1s i 10s) wybierać przełącznikiem częstotliwości (płyta tylna przyrządu) częstotliwości wzorcowe od 1Hz do 10MHz i sprawdzić, czy przyrząd mierzy poprawnie te częstotliwości.
2.2.2. Pomiar częstotliwości
Przełącznik KONTROLA-POMIAR ustawić w położeniu POMIAR (klawisz wciśnięty). Przeprowadzić pomiar częstotliwości generatora funkcji dla częstotliwości od fmin=.....kHz do fmax=.....kHz. Wyniki pomiaru zestawić w tablicy 3.
Tablica 3
Częstotliwość nastawiona |
kHz |
|
|
|
|
|
|
|
|
|
Częstotliwość pomierzona |
kHz |
|
|
|
|
|
|
|
|
|
2.2.3. Wykorzystanie częstościomierza jako źródła częstotliwości wzorcowych
Połączyć gniazdo wejściowe oscyloskopu z gniazdem CZĘSTOTLIWOŚCI WZORCOWE - WYJŚCIE umieszczonym na płycie tylnej częstościomierza. Pomierzyć amplitudę impulsów dla różnych nastaw przełącznika służącego do wyboru częstotliwości, umieszczonego również na tylnej płycie przyrządu.
Narysować przykładowy przebieg impulsów.
3. Uwagi i wnioski
5
Wyszukiwarka
Podobne podstrony:
mierniki zastosowane w ćwiczeniu 2 PEWN, Elektrotechnika-materiały do szkoły, Pomiary elektryczne wi
Ćwiczenia1 Elektroforeza
Corel Paint Shop Pro X Obrobka zdjec cyfrowych cwiczenia
Lab miernictw lektryczne LME miernik cyfrowy
Instrukca obsl ELECTRA(Piłat-korekta 26 09), Instrukcje w wersji elektronicznej
Miernictwo cyfrowe 1
SPRAWOZDANIE ĆWICZENIE 6 elektronika na 8 05
POLITECHNIKA ŽWI¦TOKRZYSKA, Miernictwo Cyfrowe
Cwiczenie5 elektroliza
Miernictwo cyfrowe1 1, Materialy na uczelnie
Technika cyfrowa 2 ćwiczenie 6 (licznik synchorniczny,?tektor sekwencji)
fotografia cyfrowa cwiczenia praktyczne cwfotc
Cw Materialy do cwiczen z elektrot
zad5, Politechnika Poznańska, Mechatronika, Semestr 03, Elektrotechnika - ćwiczenia, Elektrotechnika
corel paint shop pro x obrobka zdjec cyfrowych cwiczenia praktyczne cwpspx
Zadania - ćwiczenia, Elektrostatyka, Zad
Nr ćwiczenia, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, 10 Badanie
Konspekt do cwiczenia 2, Elektronika i Telekomunikacja, z PENDRIVE, Politechnika - EiT, 2011 2012 -
więcej podobnych podstron