ZADANIE
O AUTOMATYCZNEJ STABILIZACJI
KURSU STATKU
UPROSZCZONY MODEL NEUTRALNIE STABILNEGO STATKU
![]()
dla J>0, h>0, k>0
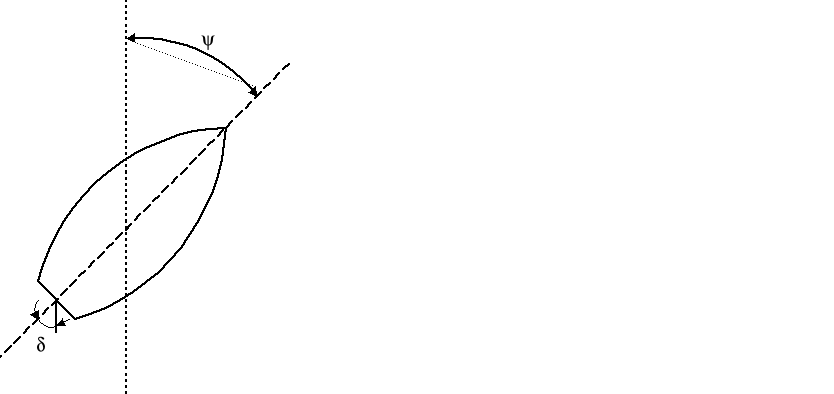
ψ - kąt odchylenia od kursu
δ - kąt wychylenia steru
J - moment inercji względem osi pionowej przechodzącej przez środek fgfgfciężkości; (biegunowy moment bezwładności)
h - współczynnik tarcia lepkiego
k - współczynnik efektywności steru

UPROSZCZONE RÓWNANIE UKŁADU
AUTOPILOT-MASZYNA STEROWA
![]()
T>0
T - stała czasowa układu
α, β - parametry, którymi stroimy układ
![]()
- pomiar odchylenia od kursu ψ
POMIAR KATA ODCHYLENIA
![]()
τ >0
Pomiar kąta odchylenia nie zachodzi natychmiast i opisany jest powyższym równaniem :
τ- stała czasowa urządzenia pomiarowego
ZADANIE
W przestrzeni parametrów (α,β) charakteryzujących układ autopilot-maszyna sterowa znaleźć obszar, w którym system ze sprzężeniem zwrotnym składający się ze statku oraz układu autopilot-maszyna sterowa jest asymptotycznie stabilny, przy następujących wartościach parametrów:
J=103, h=102, k=1, T=102, τ=10-1.
ROZWIĄZANIE
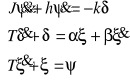
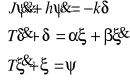
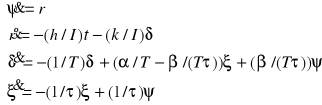
Układ równań opisujący rozważany system ma postać:
|
- model statku
- autopilot i maszyna sterowa
- pomiar kata odchylenia od kursu |
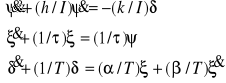
lub
|
- model statku
- pomiar kata odchylenia od kursu
- autopilot i maszyna sterowa |
ALGORYTM STEROWANIA (PD)
W automatycznej stabilizacji kursu statku w układzie autopilot - maszyna sterowa wykorzystuje się regulator typu PD, proporcjonalno - różniczkujący.
![]()
Regulator PD - posiada czas różniczkowania Td, który określa intensywność działania różniczkującego regulatora. Dzięki działaniu różniczkującemu regulator może bardzo silnie i szybko reagować już na małe zmiany odchylenia regulacji e - uchyb. Jeżeli czas jest szybki to regulator uprzedza wzrost odchylenia przez odpowiednie oddziaływanie na obiekt regulacji. Zmiana wielkości wyjściowej w regulatorze PD wyprzedza o czas Td odpowiedź regulatora P przy wymuszeniu liniowo narastającym.
Podstawiając:
![]()
Uzyskujemy:
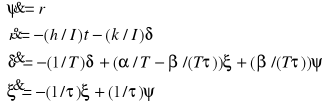
Układ liniowy stacjonarny opisany jest równaniem:
![]()
Zapisując w postaci macierzowej:
Ψ r δ ξ
![]()
= 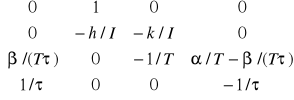
![]()
gdzie ![]()
= ![]()
jest wektorem stanu
Układ jest asymptotycznie stabilny wtedy i tylko wtedy jeżeli części rzeczywiste wartości własnych macierzy A są mniejsze od zera; Re λi < 0, takie wartości rzeczywiste macierzy A, że wyznacznik charakterystyczny macierzy A jest różny zero det(A- λI) = 0.
Gdzie: λi - wartości własne (pierwiastki wyznacznika charakterystycznego det(A- λI) = 0) macierzy A tzn. takie λi , że det(A- λI) = 0
Wstawiając do macierzy A za k, J, h, T, ![]()
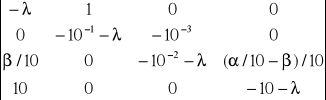
podane wartości liczbowe napiszemy równanie charakterystyczne macierzy A, czyli det(A- λI) = 0
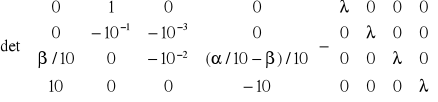
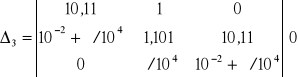
=
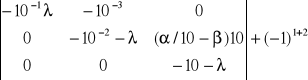
=
=![]()
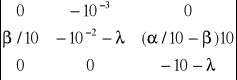
=
![]()
![]()

a4 a3 a2 a1 a0
Na podstawie badanie współczynników równania charakterystycznego badamy stabilność układu.
Wielomian charakterystyczny takiego układu przyjmuje postać:
Pn(λ) = annn + an-1λn-1 + ... + a1λ + a0
W naszym przypadku:
P4(λ) = a4λ4 + a3λ3 + a2λ2 + a1λ + a0
P4(λ) = 1λ4 + 10,11λ3 + 1,101λ2 + (10-2 + β/104)λ + α/104
Wyznacznik Hurwitza przyjmuje postać:
=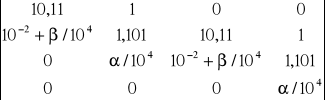
Aby układ był stabilny każdy z minorów diagonalnych tego wyznacznika musi być większy od zera więc :
Δ1 > 0
Δ2 > 0
Δ3 > 0
Δ4 > 0
Δ1= 10,11 >0
Δ2= 11,1211 - 0,0001β > 0 dla β < 1112111
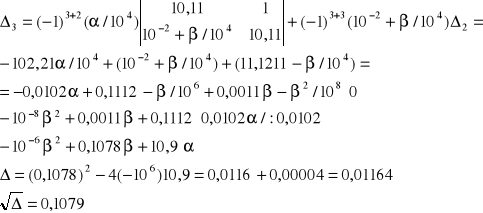
Miejsca zerowe:
β1,2 = (-b ± Δ)/2a
β1 = -50 i β2 = 107850
Współrzędne wierzchołka:
W = (α, β)= (-b/2a, -Δ/4a)
βw = 53900 i αw = 26975
Δ4 = α/104 * Δ3 ⇒ α >0 (gdyż Δ3 > 0 )
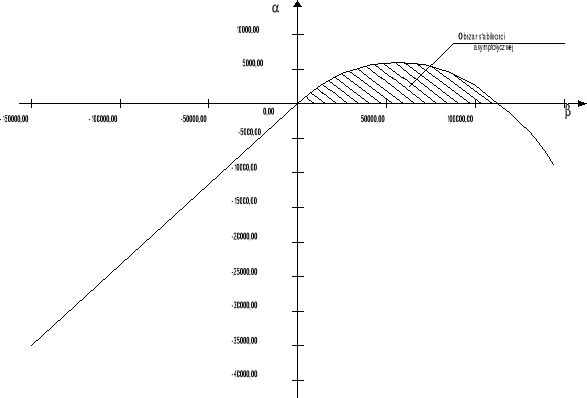
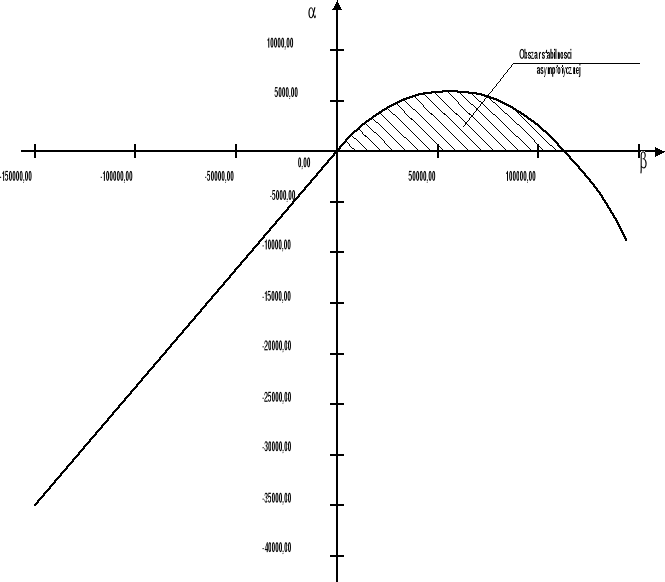
Zatem kryterium Hurwitza prowadzi do jednoczesnego spełnienia następujących nierówności:
α > 0
β < 1112111
-10-6β2 + 0,1078β + 10,9 > α
ODPOWIEDŹ
Zbiór par (α, β) spełniających układ trzech nierówności, którego interpretację geometryczną stanowi obszar zakreskowany zapewnia stabilność asymptotyczną układu .
MODEL ANALOGOWY UKŁADU
AUTOMATYCZNEJ STABILIZACJI KURSU STATKU
|
- model statku
- autopilot i maszyna sterowa
- pomiar kata odchylenia od kursu |
Korban Mariusz 6-10-2004
Kwiatkowski Bartosz
V MECH ESO mgr
8
Wyszukiwarka
Podobne podstrony:
spraw.autom.ćw.12, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUTOMATYLLL,
spraw.autom.ćw.4, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUTOMATYLLL,
spraw.autom.ćw.ś, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, AM2, Prace i sprawozd
Zaliczenie wykładów automaty duze, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szk
spraw.autom.ćw.6, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, AM2, Prace i sprawozd
AKCELE~2, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, wsm1, FIZA, FIZAII
AOL2, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do obliczeń
Diesel engine, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, Szkoła moje
MP, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, kwity, SEMESTR II, EPEC
A4, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do obliczeń P
sterówka, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, aytomaty,
Badanie tyrystorów, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
Praca Piotra, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola1, III
Zabezpieczenia, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
BADANI~4, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA, ELEKTRA
SWIAT~42, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola1, III, AUTO
więcej podobnych podstron