(8.46)
Z wyrażeń (8.41), (8.42), (8.44) i (8.46) wynika, że:
![]()
Uporządkowane postacie wzorów (8.44), kolejno dla konturów A1-1-3-A3 oraz B2-2-4-B4, według oznaczeń podanych na rysunku 8.12, są następujące:
(8.47a)
gdzie:
![]()
(8.47b)
przy czym, ogólnie, S < T.
Na mocy (8.46), otrzymujemy więc następujący zapis sztywności odsuwnej sprzęgła:

(8.48)
Masa zredukowana sprzęgła.
Jeżeli sprzęgło w jego ruchu obrotowym zostanie, na pewien czas, chwilowo "zamrożone" w dowolnym położeniu kątowym, jak to - na przykład - pokazano na rysunku 8.12, zaś na wał B zostanie narzucona prędkość odsuwna de/dt=dz/dt względem wału A, to w takich warunkach energia kinetyczna ruchomych członów sprzęgła wyniesie:

(8.49)
gdzie: MJ - masa jarzma,
JL - masowy moment bezwładności łącznika względem osi tulejki metalowo - gumowej:
![]()
JL - masowy centralny moment bezwładności łącznika w płaszczyźnie rysunku,
ML - masa łącznika,
mB - masa zredukowana sprzęgła przy potraktowaniu wału A jako elementu odniesienia; jest to masa (w sensie zredukowanym) poruszająca się wraz z elementem B.
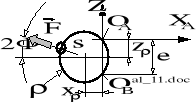
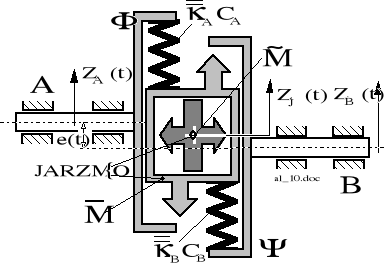
Rysunek 8.16. Położenie wektora siły niewyrównoważenia jarzma sprzęgła.
Zgodnie z rysunkiem 8.16 składowe ![]()
prędkości punktu S, wynoszą:
![]()
(8.50)
Zgodnie więc z (8.37), (8.49) i (8.50), otrzymujemy:
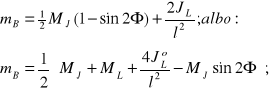
(8.51a)
Jeżeli elementem odniesienia będzie wał B, to zgodnie z [4] otrzymamy:
![]()
W tym przypadku, w dolnym wyrażeniu (8.51) należy zmienić znak "-" na "+". Dla obydwóch wariantów odniesienia masy zredukowanej sprzęgła możemy napisać:

(8.51b)
gdzie znak górny odnosi się do indeksu "B"; dolny - do indeksu "A".
Masa zastępcza łączna, wszystkich członów sprzęgła, zredukowana do środka S jarzma, wyniesie więc:
![]()
(8.52)
Siły niewyrównoważenia
Zgodnie z rysunkami 8.12 i 8.16, wektor ![]()
siły niewyrównoważenia jarzma ma następujący argument względem osi OZ:
![]()
(8.53)
Moduł tego wektora wyraża się następująco:
![]()
(8.54)
Składowa Fza wektora ![]()
zgodnie z rysunkiem 8.16, opisana jest następującym związkiem:
(8.55)
Indeks "a" w powyższym wyrażeniu oznacza przypadek eksploatacyjny, według rysunku 8.12, w którym elementy "A1,3" w ruchu obrotowym poruszają się przed elementami "B2,4". Dla przypadku odwrotnego "b", możemy napisać podobną zależność:
(8.56)
W celu pominięcia indeksów "a" i "b", w dalszym ciągu rozdziału będziemy się posługiwać symbolem (signFz).
Model dynamiczny sprzęgła
Rysunek 8.17. Model fizyczny odsuwnego sprzęgła Alsthom, gdzie odpowiednio oznaczono stałą składową masy sprzęgła oraz składową "przepompowywaną" pomiędzy wałami A i B:
![]()
(8.57)
Na rysunku 8.17 przedstawiono jedynie model fizyczny omawianego mechanizmu sprzęgła. Natomiast obrazy graficzne zmiennych okresowych:
![]()
przedstawiono odpowiednio parami na rysunkach 8.18a, 8.18b i 8.18c, gdzie przyjęto następujące oznaczenia:
mA oraz mB - wypadkowa składowa masy przemieszczającej się względem wału A lub wału B.
![]()
![]()
- sztywność połówki sprzęgła na przemieszczeniach środka S jarzma w stosunku do wału A, według (8.47), zgodnie z rysunkiem 8.15.
![]()
- sztywność na przemieszczeniach środka jarzma w stosunku do wału B.
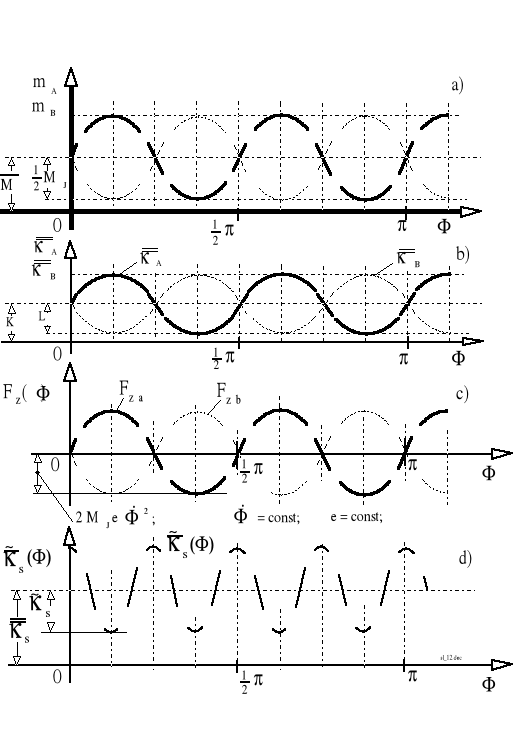
Rysunek 8.18. Obrazy wielkości zmiennych w funkcji kąta obrotu wału A.
Na rysunku 8.18, poszczególne wykresy dotyczą kolejno:
a) - mas zredukowanych;
b) - sztywności odsuwnych;
c) - sił niewyrównoważenia;
d) - sztywności kompletnego sprzęgła mierzonej na przemieszczeniu odsuwnym "e" pomiędzy wałami A i B.
Poszczególne składowe sztywności na wykresach wyrażają się następująco:
K = T + S; L = T - S; według wzorów (8.47b);
Stała składowa sztywności odsuwnej sprzęgła, mierzona pomiędzy wałami A i B, oraz okresowo zmienna składowa tej sztywności, zgodnie z wzorami (8.48), kolejno wyrażają się następująco:
Współczynniki tłumienia drgań w sprzęgle, według oznaczeń przyjętych na rysunku 8.17, można traktować jako stałe: CA + CB = 2C = const;
W tym miejscu należy zwrócić uwagę na zawsze przeciwny w fazie przebieg tętna masy, sztywności i sił niewyrównoważenia (rysunek 8.18, oraz wzory (8.47a) przypadających na poszczególne odcinki wału.
![]()
(8.58)
Traktując układ wirujących wałów niewspółosiowych wraz z łożyskami i obudową (rys. 8.17) jako wyizolowany obiekt widzimy, że pozostaje on - jako całość - wyrównoważony statycznie i dynamicznie.
Jednakże w poruszającym się po lądowej nawierzchni pojeździe, następstwa tętna sztywności sprzęgła pomiędzy odcinkami wałów A i B, nie mogą być zbilansowane obciążeniami panującymi w obudowie. Zmienna w funkcji kąta obrotu wału czynnego A sztywność odsuwna sprzęgła Alsthom, przy trakcyjnym napędzie zestawu kół pojazdu szynowego, może więc stanowić przyczynę niebezpiecznych drgań parametrycznych ramy wózka oraz całej lokomotywy. W pojeździe szynowym bowiem sztywność odsuwna zespołu napędu osi jest (nieuchronnie) włączona równolegle do struktury usprężynowania wózka i nadwozia.
Niewspółosiowość e = e(t), mierzona pomiędzy osiami wałów: aktywnego A i biernego B, w pojeździe odpowiada różnicy współrzędnych pionowego położenia osi koła ZB(t) i położenia ZA(t) ramy (wraz z przekładnią) nad tą osią. Przy badaniu właściwości dynamicznych sprzęgła, niewspółosiowość e(t) powinna więc być traktowana jako narzucona i znana.
Model dynamiczny drgań środka S masy sprzęgła, przy potraktowaniu ZA(t) i ZB(t) jako znane sygnały w dziedzinie czasu, jest następujący:
![]()
(8.59)
Znak siły ![]()
zgodnie z (8.55) i (8.56), należy odpowiednio przyporządkować do konfiguracji roboczej sprzęgła według rysunku 8.19, sporządzonego dla przypadków eksploatacyjnych zebranych w tabeli 8.4.
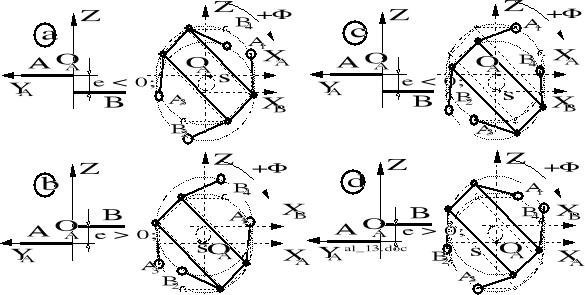
Rysunek 8.19. Przypadki położenia jarzma w zależności od kierunku przesunięcia odsuwnego e w skojarzeniu z kierunkiem roboczej prędkości obrotowej sprzęgła.
Tabela 8.4
Znak funkcji Fz w zależności od konfiguracji roboczej sprzęgła.
Przypadek wg. rys. 8. 19 |
SIGNUM Fz |
SIGNUM d/dt |
OPIS KONFIGURACJI |
a), d); |
+ |
+ |
A1,3 porusza się przed B4,2 XA leży ponad XB oraz: B4,2 porusza się przed A1,3 XB leży ponad XA |
b), c); |
- |
+ |
A1,3 porusza się przed B4,2 XB leży ponad XA oraz: B4,2 porusza się przed A1,3 XA leży ponad XB |
a), d); zmiana kierunku |
+ |
- |
A1,3 porusza się przed B4,2 XB leży ponad XA oraz: B4,2 porusza się przed A1,3 XA leży ponad XB |
b), c); zmiana kierunku |
- |
- |
A1,3 porusza się przed B4,2 XA leży ponad XB oraz: B4,2 porusza się przed A1,3 XB leży ponad XA |
196
Wyszukiwarka
Podobne podstrony:
ROZDZ 8U, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8K, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8C, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10B, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 5A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8G, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8O, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 7A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8P, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8T, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
COVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL891, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL871, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL872, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ACOVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-rys1-10, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-Rzdz3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
więcej podobnych podstron