Podstawy Automatyki - zaliczenie wykładu
Wiadomości wstępne
1. Co to jest obiekt sterowania?
Obiekt sterowania to jakiekolwiek urządzenie, układ lub element, na który chcemy oddziaływać lub chcemy nim sterować.
2. Wymień przynajmniej 4 podziały obiektów sterowania.
a) Zdeterminowane i stochastyczne
b) Stacjonarne i niestacjonarne
c) Liniowe i nieliniowe
d) Ciągłe i dyskretne
e) O stałych skupionych i o stałych rozłożonych
3. Co to jest skok jednostkowy? Sporządź rysunek.
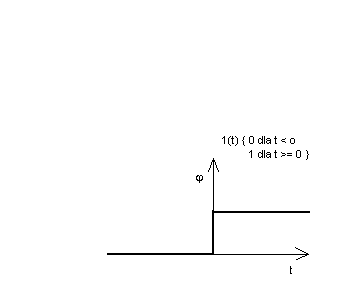
Skok jednostkowy jest gwałtowną zmianą jednej wartości na drugą.
4. Co to są zakłócenia?
Zakłócenia możemy podzielić na dwie grupy:
a) addytywne - takie, których skutki działania można zastąpić dodatkowym sztucznym sygnałem sterowania.
b) multiplikatywne - takie, które zmieniają właściowości układu, np. zmiana masy.
5. Co to jest model matematyczny obiektu?
Jest to zbiór zależności matematycznych ( układów równań i/lub nierówności) opisujących zachowanie się badanego obiektu z pominięciem zbędnych dla rozpatrywanego problemu szczegółów.
6. Narysuj otwartą strukturę sterowania. Opisz występujące bloki i sygnały.
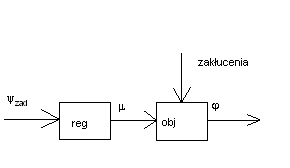
Ψ zad - sygnał zadany
μ - sygnał sterujący
φ - sygnał wyjściowy
7. Narysuj zamkniętą strukturę sterowania. Opisz występujące bloki i sygnały.
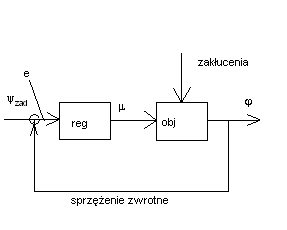
Ψ zad - sygnał zadany
μ - sygnał sterujący
φ - sygnał wyjściowy
e - uchyb regulacji
Modele obiektów sterowania
8. Wymień analityczne sposoby opisu własności obiektu dynamicznego.
a) równania różniczkowe
b) transmitancje:
- La Place'a (operatorowa)
- Fouriera (widmowa)
c) zmienne stanu
9. Wymień graficzne sposoby opisu własności obiektu dynamicznego.
a) charakterystyka skokowa (czasowa)
b) charakterystyki częstotliwościowe
c) rozkład zer i biegunów
10. Co to jest transmitancja operatorowa?
Jest to stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego, przy zerowych warunkach początkowych.
11. Jaki sens fizyczny mają zerowe warunki początkowe w definicji transminancji?
Jest to brak energii wewnętrznej w obwodzie przed załączeniem zasilania.
12. Jak można uzyskać transmitancję widmową mając transmitancję La Place'a?
Jest to możliwe za pomocą równania: s=jw
13. Co to oznacza, że transmitancja jest opisem obiektu typu „wejście-wyjście”?
Oznacza to, że znamy sygnały na wejściu-wyjściu układu, ale nie wiemy, co dzieje się wewnątrz tego układu (opis typu black box). Jest to bardzo prosty opis, ale nie daje pełnych informacji o układzie.
14. Co to są zmienne stanu? Podaj Podstawowe równania.
Zmienne stanu to zbiór wielkości fizycznych, które w pełni charakteryzują zachowanie badanego układu. Nie może być ich za mało, muszą w pełni opisywać układ.
x = Ax + Bu
y = Cx + Du
15. Czy opis obiektu za pomocą zmiennych stanu jest także opisem typu „wejście-wyjście”? Uzasadnij opowiedź.
Tak, opis objektu za pomocą zmiennych stanu jest opisem typu „wejście-wyjście”, ponieważ na wejściu układu podajemy sygnał i obserwujemy interesujące nas zmienne na wyjściu układu.
16. Który opis obiektu sterowania jest opisem najbardziej uniwersalnym i najpełniejszym? Uzasadnij odpowiedź.
Najbardziej uniwersalnym i najpełniejszym opisem obiektu sterowanie jest opis za pomocą zmiennych stanu, gdyż umożliwia nam wprowadzenie dużej ilości zmiennych, które pozwalają na znalezienie historii układu oraz opisanie układu w dowolnej chwili czasowej.
17. Czy jeden obiekt może mieć wiele róznych modeli w postaci macierzy stanu?
Uzasadnij odpowiedź.
Tak, gdyż opis za pomocą macierzy stanu nie jest jednoznaczny i zależy od wybranych zmiennych stanu.
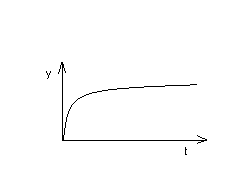
18. Co to jest charakterystyka skokowa?
Jest to odpowiedź układu na pobudzenie w postaci skoku jednostkowego.
19. Ile rodzajów charakterystyk częstotliwościowych występuje w opisie obiektów sterowania?
a) amplitudowa
b) fazowa
c) Nyquista
d) logarytmiczna
20. Jakie informacje można uzyskać z charakterystyki częstotliowściowej?
Charakterystyki częstotliowściowe mówią o tym, na jakie sygnały (z jakiego pasma f) badany obiekt będzie reagował a dla jakich nie. Mówią one też o o charakterystyce układu względem pasma przenoszenia sygnału.
21. Co to są charakterystyki logarytmiczne obiektu? Wyjaśnić przyczynę użycia słowa ”logarytmiczna”.
Charakterystyki logarytmiczne obiektu to charakterystyki Bodego tzn. zależność amplitudy od częstotliwości i fazy od częstotliwości. Słowa logarytmiczne używa się, ponieważ oś X (częstotliwość) wyskalowana jest logarytmicznie.
22. Co to jest rozkład zer i biegunów? Czy można z niego uzyskać transmitancje operatorową?
Jest to rozmieszczenie zer i biegunów na płaszczyźnie liczb zespolonych lub płaszczyźnie „s” gdzie: zero to miejsce zerowe licznika transmitancji, a biegun to miejsce zerowe mianownika transmitancji. W związku z powyższym, z rozkładu tego można uzyskać transmitancje operatorową.
23. Wymienić podstawowe człony dynamiczne.
a) proporcjonalny
b) całkujący idealny
c) różniczkujący idealny
d) inercyjny
e) całkujący rzeczywisty
f) różniczkujący rzeczywisty
g) oscylacyjny
h) opóźniający
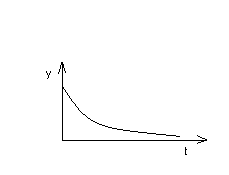
24. Podać transmitancję La Place'a i charakterystykę skokową członu inercyjnego.
![]()
gdzie: k - współczynnik wzmocnienia
T - stała czasowa
25. Podać transmitancję La Place'a i charakterystykę skokową członu różniczkującego rzeczywistego.
![]()
gdzie: ![]()
- stała czasowa różniczkowania
T - stała czasowa
26. Podać transmitancję La Place'a i charakterystykę skokową członu oscylacyjnego.
![]()
gdzie: k - współczynnik wzmocnienia
ξ - współczynnik tłumienia
![]()
- stała czasowa
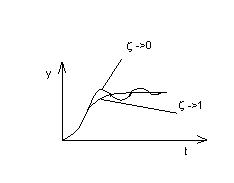
0 ≤ ζ ≤ 1
27. Jaka jest główna różnica pomiędzy członem oscylacyjnym a pozostałymi, podstawowymi członami dynamicznymi? Rozważ rolę współczynnika tłumienia.
Głowną różnicą jest to, że człon oscylacyjny ma transmitancję drugiego rzędu. Współczynnik tłumienia zawiera się w przedziale: 0 ≤ ζ ≤ 1. Dla 1 otrzymamy charakterystykę skokową jak dla członu inercyjnego, natomiast dla 0 charakterystyka skokowa jest falą sinusoidalną.
28. Co to jest stabilność obiektu? Czy zależy ona od zewnętrznych sygnałów działających na obiekt?
Stabilność to zdolność układu do powracania do stanu równowagi po ustaniu przyczyny, która go ze stanu równowagi wytrąciła.
Stabilność jest cechą wewnętrzną układu, nie zależy od sygnałów działających na układ.
Wyróżniamy 3 stany:
a) asymptotycznie statyczny
b) na granicy stabilności
c) niestabilny
29. Jaki jest podstawowy warunek asymptotycznej stabilności obiektu?
Warunkiem koniecznym i dostatecznym asymptotycznej stabilności obiektu jest położenie biegunów transmitancji w lewej, otwartej półpłaszczyźnie liczb zespolonych.
30. Które pierwiastki: licznika czy mianownika transmitancji decydują o stabilności obiektu ? Uzasadnij odpowiedź.
O stabilności obiektu decydują pierwiastki mianownika transmitancji, ponieważ są to bieguny transmitancji, a to od ich położenia w płaszczyźnie zespolonej zależy stabilność układu.
31. Co to jest kryterium stabilności? Wymień przykładowe.
Kryterium stabilności jest to metoda pozwalająca rozstrzygnąć o tym czy układ jest stabilny czy też nie. Przykłady:
a) analityczne: - Hurwitza
- Routha
b) graficzne: - Nyquista
32. Jeżeli stabilność możemy wnioskować na podstawie położenia biegunów transmitancji to, po co potrzebne są kryteria stabilności?
Kryteria stabilności są potrzebne, gdy nie potrafimy wyznaczyć biegunów transmitancji, oraz gdy chcemy znać więcej informacji na temat układu, niż tylko jego stabilność.
33. Do jakich układów nie możemy stosować kryterium Nyquista?
Kryterium to nie może być stosowane do układów otwartych.
34. Co to jest zapas modułu i zapas fazy? Do czego może być przydatny?
Zapas modułu - to krotność współczynnika wzmocnienia, która przy niezmienianym argumencie (fazie), doprowadza układ do granicy stabilności.
Zapas fazy - jest to przyrost argumentu (fazy), który przy niezmienianym współczynniku wzmocnienia doprowadza układ zamknięty do granicy stabilności.
Oba zapasy są bardzo przydatne, ponieważ informują nas jak bardzo możemy zmodyfikować układ, aby znalazł się na granicy stabilności.
35. Jak objawia się niestabilność w sygnale wyjściowym obiektu?
Sygnał wyjściowy układów niestabilnych rośnie wraz z czasem do nieskończoności.
Identyfikacja
36. Czym zajmuje się dział automatyki zwany identyfikacją?
Identyfikacja to droga pozwalająca zbudować model układu w wyniku eksperymentów na tym układzie.
37. Czy proces identyfikacji kończy się na znalezieniu wartości parametrów modelu obiektu? Uzasadnij odpowiedź.
Nie, proces identyfikacji składa się z dwuch części. Pierwszą z nich jest znalezienie współczynników, a drugą weryfikacja otrzymanych danych.
38. Co to są metody podstawowe identyfikacji własności dynamicznych obiektu? Co do nich zaliczamy?
Są to metody pozwalające określić dynamiczne parametry obiektu, zaliczamy do nich:
a) metoda charakterystyki skokowej
b) metoda charakterystyk częstotliwościowych
c) metoda korelacyjna
39. Czy w metodzie charakterystyki skokowej można wyznaczyć parametry dowolnej transmitancji, czy tylko niektórych? Uzasadnij odpowiedź.
Nie można wyznaczyć bezpośrednio parametrów transmitancji kilku połączonych członów inercyjnych oraz parametrów transmitancji członu oscylacyjnego, ponieważ te transmitancje są pierwszego rzędu.
*40. Pokaż na rysunku sposób wyznaczania parametrów transmitancji członu inercyjnego z opóźnieniem.
Sterowanie ciągłe
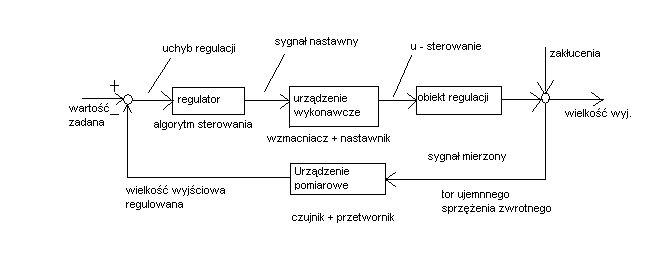
41. Narysować podstawowy schemat blokowy zamkniętego układu regulacji. Opisać występujące w nim bloki i sygnały (przyjąć, że występują w układzie, co najmniej cztery bloki).
42. Podać wzór określający uchyb regulacji.
e = r - y
e - uchyb
r - sygnał zadany
y - sygnał wyjściowy
43. Co to są zakłucenia addytywne ? Podać przykład.
Są to zakłucenia, których skutki możemy zastąpić dodatkowym, sztucznym sygnałem sterowania. Są łatwe do eliminacji.
44. Co to są zakłucenia multiplikatywne ? Podać przykład.
Są to zakłucenia zmieniające właściwości układu. Są trudne do eliminacji.
45. Co to jest kryterium jakości sterowania ? Podać przykład.
Jest to pewien wskaźnik, którego wartość mówi nam w jakim stopniu układ regulacji spełnił swoje zadanie, np. kryterium minimalnoczasowe,
46. Co to jest sterowanie minimalnoczasowe ? Jaka jest postać kryterium jakości sterowania w tym przypadku ?
Jest to sterowanie w którym zależy nam na szybkości regulacji. Kryterium sterowania ma postać:

*47. Czy obecność dynamiki członów wykonawczych i pomiarowych w układzie sterowania ułatwia czy utrudnia pracę regulatora ?
Utrudnia pracę, gdyż układ robi się bardziej skomplikowany. Pogarsza się regulacja i sterowanie, poprzez fizyczne opóźnienia każdego członu.
48. Wymienić główne klasy (rodzaje) sterowania.
- stabilizacja
- sterowanie programowe
- sterowanie nadążne (śledzenie)
- sterowanie ekstremalne
49. Czym charakteryzuje się stabilizacja ?
Sygnał zadany jest stały. Jest to utrzymanie pewnej wielkości na określonym zadanym poziomie niezależnie od zakłuceń.
50. Czym charakteryzuje się sterowanie programowe ?
Tym, że zanim przystąpimy do procesu regulacji, z góry wiemy jak układ będzie się zachowywał ( jak się będzie zmianiał sygnał zadany w czasie).
51. Czym charakteryzuje się sterowanie nadążne, zwane także śledzącym ?
Nie wiemy nic na temat zadanego sygnału ( jak będzie się ten sygnał zmieniał).
52. Czym charakteryzuje się sterowanie ekstremalne ?
Jest to rodzaj sterowania, w którym regulator utrzymuje wartość wyjściową obiektu na wartości ekstremalnej (max lub min).
53. Do jakich układów można stosować sterowanie ekstremalne ?
Może być stosowane do obiektów mających ściśle określoną zalżność między sygnałem sterującym a wyjściowym.
54. Co to jest transmitancja uchybowa ?
Transmitancja uchybowa mówi nam jak zależy uchyb od sygnału zadanego.
![]()
Gp - transmitancja obiektu
Gr - transmitancja regulatora
55. Jaka jest różnica pomiędzy układem statycznym i astatycznym ?
Układ astatyczny ma przynajmniej jeden pierwiastek mianownika transmitancji w zerze. W układach statycznych przebieg y(t) się ustala, natomiast w astatycznych sygnał rośnie do nieskończoności.
56. Co to jest stan przejściowy w procesie regulacji ?
Jest to okres czasu, w którym wartość uchybu oscyluje w okolicach uchybu ustalonego (+/- 5 %) i nie przekracza tej wartości.
57. Co to jest stan ustalony w procesie regulacji ?
To to czas po którym uchyb ma stały poziom.
58. Czym różni się dokładność statyczna regulacji od dokładności dynamicznej ?
Charakteryzując dokładność statyczną bierzemy pod uwagę jakość procesów regulacji w stanie ustalonym, przy różnych typowych wymuszeniach.
Dokładność dynamiczna charakteryzowana jest dla stanów przejściowych.
59. Czym charakteryzują się układy, w których regulatory dobiera się przy założeniu skokowych zmian sygnałów wejściowych (zadanych i zakłócających) ?
W układach tych występują stany ustalone i przejściowe.
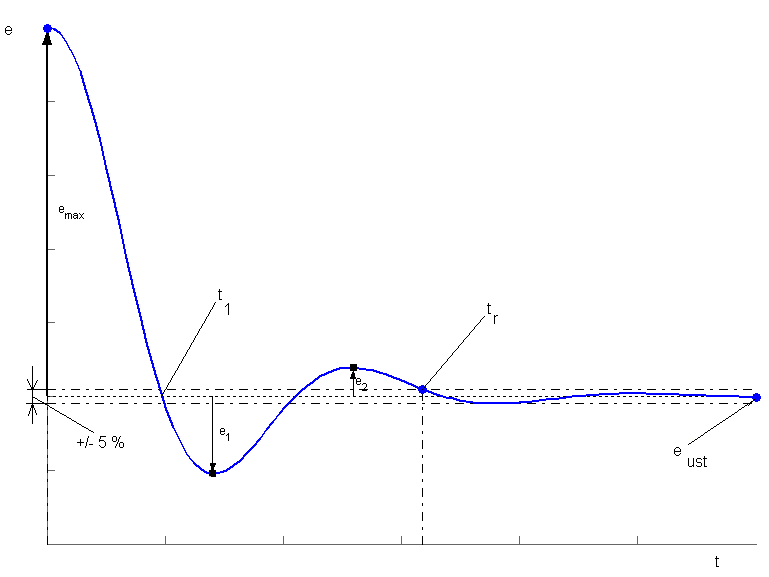
60/61. Narysować przebieg uchybu regulacji w czasie przy wymuszaniu w postaci skoku jednostkowego. Zaznaczyć na rysunku sposób określenia uchybu ustalonego i przeregulowania.
![]()
![]()
emax - uchyb maksymalny
eust - uchyb ustalony
t1 - czas po którym układ po raz pierwszy osiąga wartość ustaloną
tr - czas regulacji, po którym uchyb wchodzi w pasek +/- 5 % i już z niego nie wychodzi.
przeregulowanie
δ oscylacyjność
62. Jaki parametr charakteryzuje dokładność styczną ?
eust - uchyb ustalony
63. Od czego zależy 100 % dokładność statyczna w układzie regulacji ?
Dokładność statyczna dotyczy stanu ustalonego. Określa zdolność układu regulacji do utrzymania wartości regulowanej. Miarą dokładności statycznej układu są wartości uchybu regulacji w stanie ustalonym, a więc 100 % dokładność jest gdy wartość uchybu ustalonego jest równa 0.
64. Co to jest regulator konwencjonalny PID ? Wyjaśnić ten skrót.
Regulator konwencjonalny PID (Proporcjonalno-całkująco-różniczkujący) zwany klasycznym. W skład jego wchodzą człony: proporcjonalny, całkujący oraz różniczkujący.
65. Jakiego rodzaju zakłucenia jest w stanie kompensować regulator PID ?
Kompensuje zakłucenia addytywne.
66. Jakie są wady i zalety regulatora konwencjonalnego zawierającego człon całkujący ?
Zaletą jest uchyb ustalony równy 0, natomiast wadą jest to, żę układ zbliża się do granicy stabilności.
67. Co nam daje zastosowanie w regulatorze PID członu różniczkującego ?
Człon różniczkujący przyspiesza reakcję układu w pierwszej chwili, ale generuje duże sygnały na wyjściu regulatora. Układ taki jest stabilny.
68. Na czym polega metoda Zieglera-Nicholsa doboru nastaw regulatora PID ?
Metoda ta polega na wykonaniu na objekcie eksperymentu i obliczeniu nastaw regulatora na podstawie wyników tego eksperymentu.
69. Jakie są wady i zalety tej metody ?
Zaletą jest to, ża mamy szybki układ i nie musimy nic wiedzieć o objekcie. Wadą natomiast jest to, że mamy duże oscylacje.
70. Na czym polega metoda tablicowa doboru nastaw regulatora PID ?
Metoda ta polega na wyznaczeniu nastaw regulatora na podstawie parametrów podanych w tablicach.
71. Która z metod: Zieglera-Nicholsa czy tablicowa daje przebiegi uchybu regulacji o większej oscylacyjności ?
Metoda Zieglera-Nicholsa.
Elementy automatyki
72. Jakie są wady i zalety układów pneumatycznych stosowanych w automatyce ?
Zalety:
- brak zagrożenia pożarowego
- odporność na zakłucenia i zanieczyszczenia
- prostota i niska cena
Wady:
- ograniczony stopień komplikacji regulatora (max PID)
- ograniczony dystans przesyłu sygnału ( do 100 m )
- konieczność stosowania stacji uzdatniania powietrza
73. Jakie są wady wady i zalety układów hydraulicznych stosowanych w automatyce ?
Zalety:
- duże siły i momenty uzyskiwane z małej masy
- duża trwałość
Wady:
- duży koszt
- ograniczony stopień komplikacji regulatora (max PID)
74. Określić z punktu widzenia automatyki, niepożądane własności urządzeń wykonawczych na przykładzie maszyny sterowej ?
Bezwładność siłowników oraz zapowietrzanie się pomp siłowników.
75. Co to są regulatory dwustawne ? Podać przykład.
O charakterystyce przekaźnikowej, którego wyjście może przybrać tylko dwie wartości (0 lub 1 ). Stosuje się je tam gdzie występuje ubytek sygnału wyjścia. Regulatory dwustawne służa do stabilizacji (np. ciśnienia, temperatury). Działanie można śledzić na wykresach czasowych (np. „ubytek” malenie temp.) Przykład: zamykanie włącznika lub zaworu.
76. Od czego zależy jakość sterowania przy zastosowaniu regulatora dwustawnego ? Jak ją można poprawić ?
Dokładnośc regulacji mierzy się amplitudą, która zależy od szerokości pętli histerezy, jednak nie zawsze stabilizuje tę wartość, o którą nam chodzi. Próby poprawy regulacji dwustanowej polegają na działaniu w kierunku zmniejszania amplitudy oscylacji.
77. Co to jest regulator krokowy ?
Jest to regulator trójpołożeniowy, w którym członem wykonawczym jest człon całkujący.
Układy dyskretne
78. Jakie są główne grupy (rodzaje) sterowań dyskretnych ?
Sterowanie asynchroniczne - logiczne
Sterowanie synchroniczne - cyfrowe
79. Co to jest sterowanie logiczne ? Podaj przykład okrętowy.
Jest to sterowanie polegające na włączaniu i wyłączaniu określonych urządzeń, poprzez podejmowanie decyzji na podstawie praw logiki matematycznej. Jest ono realizowane za pomocą programowalnych sterowników logicznych PLC. Na przykład: utrzymywanie statku w dokładnych położeniu; reakcja na zmiany stanu morza.
80. Podaj podstawowe zadania sterowania logicznego.
- sterowanie procesami
- zbieranie i obróbka pomiarów
- przesyłanie informacji do innych sterowników
- diagnostyka(sprawdzanie drożności kanałów),samotestowanie(sprawdzanie przy włączeniu)
81. Opisz główne cechy sterowania logicznego, dzięki którym jest ono tak popularne.
Podstawową cechą sterowania logicznego jest włączanie i wyłączanie określonych urządzeń. Działanie wynika ze sprawdzenia pewnych określonych warunków logicznych.
82. Co to są sterowniki PLC ?
Są to programowalne sterowniki logiczne, zawierające mikroprocesor, układ wejścia - wyjścia oraz pamięć ROM do której wprowadzamy program.
83. Co to są układy SCADA ?
Są to systemy sterujące nadrzędnie i zbierające dane. Służą do obróbki informacji (bazy danych, archiwizatory). Układy te są w stanie pobrać dane dla użytkownika ( np. zużycie energii ) oraz umożliwiają wskazanie procesów awaryjnych.
84. Do czego służą sieci przemysłowe typu PROFIBUS lub MODBUS.
Wyszukiwarka
Podobne podstrony:
automatyka-opracownie v0.8, mechatronika, II rok, automatyka
Podstawy pielęgniarstwa II rok tematy ćw od rocznika 12 15 ` h
Automaty 2 by Endrju i Falu, AGH IMIR Mechanika i budowa maszyn, II ROK, Automatyka, Automaty
podstawy immunologii, II rok, Immunologia
podstawy, studia - mechatronika UWM, rok I sm I i II, podstawy mechatroniki
SPRAWKO 1, AGH WIMIR Mechanika i Budowa Maszyn, Rok II, II semestr, Automatyka [Gladiator Jacek Snam
automatylab1, AGH WIMIR Mechanika i Budowa Maszyn, Rok II, II semestr, Automatyka [Gladiator Jacek S
Zagadnienia Podstawy Biotechnologii Środowiska, II rok, II semestr
inż, administracja, II ROK, III Semestr, podstawy budownictwa + inżynieria komunikacyjna
Ustanie stosunku pracy, Wojskowa Akademia Techniczna - Zarządzanie i Marketing, Licencjat, II Rok, S
Podstawy Prawa Karnego, Administracja II rok, Prawo karne
pytania1, administracja, II ROK, III Semestr, podstawy budownictwa + inżynieria komunikacyjna, od Da
Czas pracy, Wojskowa Akademia Techniczna - Zarządzanie i Marketing, Licencjat, II Rok, Semestr 3, Po
pytania&odp teoretyczne, administracja, II ROK, III Semestr, podstawy budownictwa + inżynieria komun
Podstawy animacji społeczno-kulturalnej, Pedagogika w zakresie edukacji dorosłych z gerontologią, II
2008 2009. Podstawy Ekonomii. Program wykładów .WYDZ. PRAWA.. 30 h, Administracja II rok, Ekonomia
więcej podobnych podstron