INSTYTUT ELEKTROENERGETYKI zakład układów i sieci elektroenergetycznych |
|
|||||||
nazwa laboratorium |
||||||||
Prowadzący: |
dr inż. Andrzej KWAPISZ |
|
|
|||||
Temat: |
Podstawy modelowania układów automatyki w programach PSCAD, SciLab i Octave |
|||||||
Nr ćwiczenia: |
01 |
Data wykonania ćwiczenia: |
2005-11-30 |
|||||
Nr stanowiska: |
02 |
Data oddania sprawozdania: |
2009-12-09 |
|||||
Grupa: |
E5 - 1 |
|||||||
Wykonał: |
Rusek Mieczysław |
Uwagi: |
||||||
Ocena: |
|
|
||||||
|
|
|
||||||
|
|
|
||||||
|
|
|
||||||
|
|
|
||||||
|
|
|
||||||
|
|
|
||||||
Cel ćwiczenia
Celem ćwiczenia jest zbadanie wpływy konstrukcji regulatora typu PID oraz metody doboru jego współczynników na jakość regulacji, czyli uchyb i czas stabilizacji sygnału wyjściowego.
Schemat układu:
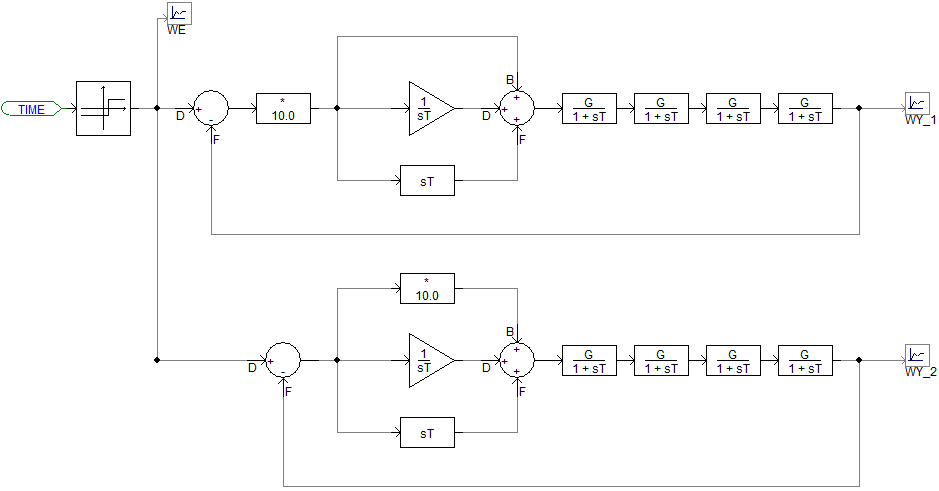
Po około 0,2s można zauważyć skok na wejściu, który początkowo ma niestabilną amplitudę, jednak ta amplituda stabilizuje się wraz z upływem czasu.
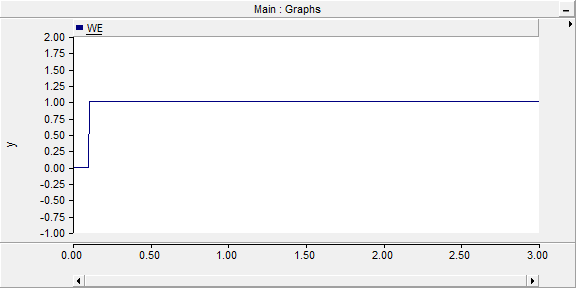
Przebieg sygnału WE na wejściu:
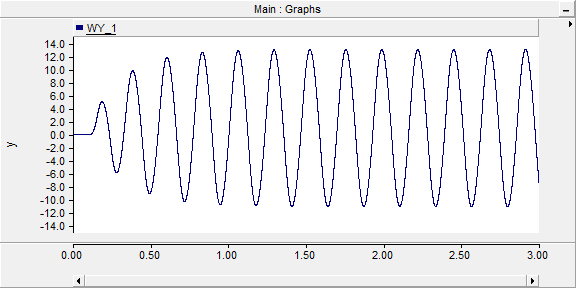
Przebieg sygnału WY_1 przy wzmocnieniu Kosc:
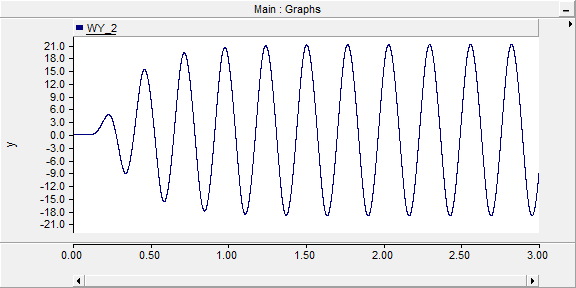
Przebieg sygnału WY_2 przy wzmocnieniu Kosc:
Dobrze dobrane wartości wzmocnienia powodują wyrównanie się amplitudy na wyjściach WY_1 i WY_2. Otrzymujemy zatem regulator stabilny. Wartości nastawy można obliczyć stosując metodę Ziegler'a-Nichols'a.
Schemat układu

Przebieg sygnału wyjściowego ZN_2 przy wzmocnieniu Kosc:
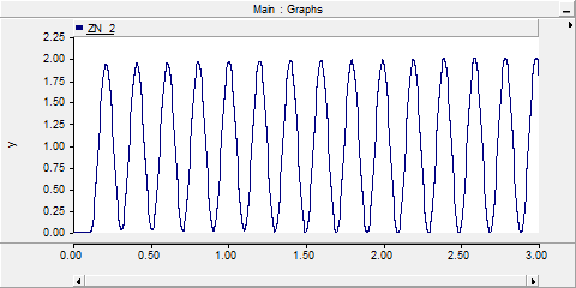
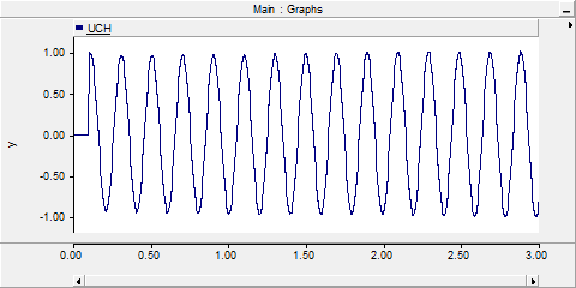
Przebieg sygnału uchybu
Z wykresu ZN_2 możemy odczytać wartości
oraz
Tenat ćwiczenia
Nazwa laboratorium - sprawozdanie |
strona 2/5 |
Nazwa laboratorium - sprawozdanie |
strona 1/5 |
Wyszukiwarka
Podobne podstrony:
Sprawozdanie z automatyki stolarek, MiBM Politechnika Poznanska, IV semestr, automatyka, Automatyka
automaty-, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automatyka, Autom
12 - Przekszt sch blok, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Auto
kryterium Hurwitza, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automaty
14 Stabilnosc, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automatyka, A
Zagadnienia na egzam z automatyki, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pie
automatyka lab cw 4, MiBM Politechnika Poznanska, IV semestr, automatyka, Automatyka
01 Transmitancja op, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automat
4[1]. elementy bezinercyjne, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly,
05 El inercyjne, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automatyka,
09 Transmitancja widmowa, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Au
03[1]. Typowe wymuszenia, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Au
Elementy calkujace, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automaty
17 Kryterium Nyquista, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Autom
02 Przeksztalcenie Laplace, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly,
18 log kryterium Nyquista, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, A
03 - Pomiar twardości sposobem Brinella, MiBM Politechnika Poznanska, IV semestr, labolatorium wydym
02 - Statyczna próba skręcania, MiBM Politechnika Poznanska, IV semestr, labolatorium wydyma, sprawk
spis tresci, MiBM Politechnika Poznanska, IV semestr, PKM, sciaga PKM
więcej podobnych podstron