|
WEKTORY I PRZESTRZENIE WEKTOROWE
|
W wykładzie omówimy definicję przestrzeni wektorowej. Przedstawimy jej podstawowe własności i przykłady, w tym przestrzenie Rn. Zdefiniujemy pojęcie liniowej niezależności wektorów oraz metody jej sprawdzania.
Definicja-1 Niepusty zbiór V nazywamy rzeczywistą przestrzenią wektorową (liniową) jeśli:
|
|
|
dla każdych 
określona jest ich suma taka że 
;
|
|
dla każdej liczby rzeczywistej 
i 
określony jest iloczyn taki że 
|
Powyższe działania spełniają następujące warunki
dla dowolnych 
|
|
przemienność dodawania: 
|
|
łączność dodawania: 
|
|
istnienie elementu neutralnego dodawania,
|
|
|
|

dla dowolnych 
|
|

dla dowolnego 
|
|

dla dowolnych 
|
|

dla dowolnego 
|
Zastępując w definicji rzeczywistej przestrzeni wektorowej liczby rzeczywiste α i β przez liczby zespolone otrzymamy definicję
zespolonej przestrzeni wektorowej.
Elementy przestrzeni V nazywamy wektorami oznaczamy je strzałkami.
Element neutralny 
nazywamy wektorem zerowym przestrzeni V.
Dla operacji wprowadzonych w przestrzeni liniowej łatwo uzasadnić następujące własności:
|
|

dla każdego 
;
|
|

dla każdego 
;
|
|

, gdy 
;
|
|

, gdy 
|
|
|
|
|
Definicja-2 (ogólniejsza)
Przestrzeń liniowa (wektorowa) V nad ciałem K to struktura 
składająca się ze zbioru V którego elementy nazywamy wektorami
oraz z ciała liczbowego (K,+,•) i działań 
oraz 
gdzie :

nazywamy dodawaniem wektorów ze zbioru V

nazywamy mnożeniem wektora ze zbioru V przez liczbę z ciała K
|
Działania te mają następujące własności:
Struktura 
jest grupą przemienną (abelową)
|
|
|
|
|
|
|
|
|
|
|
|
istnienie elementu neutralnego
|
|
|
|
istnienie elementu symetrycznego
|
|
|
|
|
W strukturze 
okreslono mnożenie wektora przez liczbę z ciała K
|
|
|

działanie wewnętrzne
|
III. Działania 
spełniają warunki zgodności
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wprowadzimy jeszcze pojęcie podprzestrzeni wektorowej czyli przestrzeni wektorowej zanurzonej w danej przestrzeni wektorowej.
|
|
Niepusty podzbiór W 
V jest podprzestrzenią liniową,
jeśli spełnione są 2 warunki:
|
|
|
|
|
Innymi słowami działania:
mnożenia wektora przez liczbę
są wewnętrzne w podzbiorze W
(nie wyprowadzają poza podzbiór W)
Przykłady przestrzeni wektorowych
|
Podstawowym przykładem przestrzeni liniowej jest
rzeczywista przestrzeń n-wymiarowa Rn :
Działania w 
są określone następująco:
gdzie: 
i 
W szczególności przestrzeń R3 możemy utożsamiać ze zbiorem trójek liczb rzeczywistych [x1,x2,x3], które odpowiadają współrzędnym wektorów
w pewnym wybranym układzie współrzędnych.
Kartezjański układ współrzędnych w 
Początek układu, np. punkt 
.
Trzy wzajemnie prostopadłe proste poprowadzone przez punkt 
- osie x, y, z układu.
Jednostki długości określone na każdej osi.
Współrzędne 
punktu P - rzuty punktu P kolejno na osie x, y, z.

y
Wektory przestrzeni wektorowej R3 zadane za pomocą trójek liczb 
możemy również utożsamiać ze skierowanym odcinkiem o początku w punkcie 
i końcu w punkcie 
.
Podobnego utożsamienia możemy dokonać w dowolnej przestrzeni Rn.
Przykłady innych przestrzeni liniowych:
Przestrzeń Amxn macierzy o m wierszach i n kolumnach. Operacje dodawania i mnożenia w tej przestrzeni pokrywają się z poznanymi przez nas poprzednio operacjami na

, 

,
zbiór wszystkich wielomianów rzeczywistych
3. Przestrzeń 
zbiór wielomianów rzeczywistych stopnia ≤ n
Przestrzeń funkcji T(I) określonych na przedziale 
. Działania w przestrzeni T(I) wprowadzamy w sposób naturalny:
0 1
Kombinacja liniowa wektorów
|
Kombinacją liniową wektorów 
, i = 1, 2, ...,n nazywamy wektor postaci
gdzie 
, i =1, 2, ... , n są liczbami rzeczywistymi
|
Przykład (przestrzeń 
)
[4, 5, -8] = 1∙[0, 1, 0] + 2[2, 2, -4]
4[1, 2, 3] + 5[-3, 4, 2] - 4[1, 0, 1] =[-15, 28, 18]
|
|
przez symbol lin{ 
}.
Wektory 
nazywamy wektorami generującymi
lub generatorami przestrzeni lin{ 
}.
|
Podprzestrzeń rozpięta na wektorach 
i 
ma postać kombinacji wektorów o współczynnikach rzeczywistych:
i wyznacza płaszczyznę w przestrzeni przechodzącą przez punkt 
w której wektory [4,3,1] i [1,2,0] są zawarte.
Przestrzeń liniowa rozpięta na zbiorze wektorów jest przykładem podprzestrzeni liniowej.
|
Skończony ciąg wektorów 
jest liniowo niezależny wtedy i tylko wtedy gdy :
dla każdego układu 
liczb rzeczywistych takich że:

zachodzi: 
albo mówiąc krócej - zachodzi implikacja:
|
Nieskończony ciąg wektorów 
jest liniowo niezależny, gdy każdy jego skończony podzbiór jest liniowo niezależny.
|
Jeżeli wektory 
nie są liniowo niezależne, to mówimy, że są one liniowo zależne
|
czyli 
jest wektorem zerowym
|
Jeżeli dwa wektory 
są liniowo zależne,
to istnieją liczby 
gdzie
,
takie, że 
Jeśli np. 
to wtedy: 
czyli 
jest proporcjonalny do 
(wektory te są wpółliniowe)
|
oraz 
Jeżeli np. 
to 
czyli wektor 
jest liniową kombinacją pozostałych wektorów.
(wektory te są współpłaszczyznowe)
|
|
Dwa wektory w przestrzeni R2 są liniowo niezależne wtedy i tylko wtedy gdy nie są współliniowe
|
Trzy wektory w przestrzeni R3 są liniowo niezależne wtedy i tylko wtedy gdy nie są współpłaszczyznowe.
|
Układ wektorów 
jest liniowo zależny
wtedy i tylko wtedy, gdy jeden spośród wektorów
jest liniową kombinacją pozostałych
|
Wektory [1, 2, 3], [-3, 4, 2], [1, 0, 1] , [-15, 28, 18]
są liniowo zależne, można bowiem zauważyć że:
4[1, 2, 3] + 5[-3, 4, 2] - 4[1, 0, 1] = [-15, 28, 18]
Przykład - Przestrzeń T(I)
gdyż 
dla x
[0,2π]
Z definicji liniowej niezależności wynikają następujące fakty:
|
|
wektor 
jest liniowo niezależny wtedy i tylko wtedy gdy 
|
|
podzbiór zbioru liniowo niezależnych wektorów jest liniowo niezależny
|
|
jeśli wektory 
są liniowo zależne
to zbiór wektorów 
jest również liniowo zależny dla dowolnego 
;
|
|
Zbiór 
jest zawsze liniowo zależny dla dowolnych 
|
Liniowa niezależność wektorów w Rn
Przypomnijmy, że wektory 
są liniowo niezależne wtedy i tylko wtedy, gdy macierz A o kolumnach 
wymiaru n x k ma rząd k.
Zauważmy, że wówczas z tw. Kroneckera-Capelli wynika, że równanie 
ma dokładnie jedno
rozwiązanie i jest to rozwiązanie zerowe 
.
Ostatnie stwierdzenie jest niczym innym tylko
definicją liniowej niezależności!
Wykorzystując jeszcze raz tw. Kroneckera-Capelli możemy stwierdzić, że maksymalna liczba liniowo niezależnych wektorów w przestrzeni 
wynosi n.
Żaden układ 
wektorów z 
nie jest liniowo niezależny.
Macierz 
ma wymiar (n)
(n+1),
a zatem nie może mieć rzędu równego n+1.
Układ wektorów 
o wymiarze n jest liniowo niezależny wtedy i tylko wtedy gdy:
Sprawdzić, czy wektory są liniowo niezależne:
[1, 2, 3], [2, 3, 4], [3, 4, 5]
Wektory dane układamy jako wiersze macierzy A
i badamy czy rząd macierzy A jest równy 3.
A = 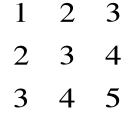
Det A = 0 
R(A) ≠ 3 tzn. wektory są liniowo zależne.
Wektory postaci: 
i=1,2,...,n
gdzie jedynie i- ta współrzędna ≠0, są liniowo niezależne.
Oczywiście, w tym przypadku A=I a zatem 
.
Wprowadzimy teraz definicję bazy przestrzeni wektorowej.
Bazą przestrzeni wektorowej V nazywamy zbiór
wektorów tej przestrzeni, taki że:
(1) B generuje całą przestrzeń V tj. lin{ B} = V
(2) B składa się z wektorów liniowo niezależnych
|
Sprawdzić, że układ wektorów
jest bazą w przestrzeni R2.
Warunek (1) jest spełniony, gdyż dla dowolnego 
istnieje rozwiązanie równania:
mającego postać równoważną
Wynika to oczywiście z faktu, że wyznacznik macierzy współczynników równania jest różny od 0.
Podobnie, aby sprawdzić warunek (2) wystarczy rozpatrzeć wektor 
.Wówczas jedynym rozwiązaniem układu równań jest [c1,c2ၝ = ၛ0,0ၝ, a zatem układ 
jest układem wektorów liniowo niezależnych.
Spełnione są warunki (1) (2) - rozpatrywany układ jest bazą.
Z przykładu wynika następujące ważne stwierdzenie:
Niech 
oznacza macierz nxn
taką, że j-tą kolumną tej macierzy jest wektor 
.
Jeśli wyznacznik macierzy jest niezerowy tzn. det A≠0,
to układ 
jest bazą przestrzeni Rn.
|
Udowodnimy teraz ważne twierdzenie o jednoznaczności przedstawienia wektora w bazie
współczynniki 
kombinacji liniowej
są wyznaczone jednoznacznie i nazywają się
współrzędnymi wektora 
w bazie 
|
Reprezentację 
wektora w bazie B zapisujemy:
Z definicji bazy wynika, że wektor 
jest pewną kombinacją liniowa wektorów
.
Załóżmy, że wektor 
posiada dwie różne reprezentacje w tej samej bazie, tzn.:
gdzie 
i nie wszystkie współczynniki są zerowe, co przeczy liniowej niezależności wektorów
.
Zauważmy, że dla przestrzeni Rn możemy podać inny dowód tego twierdzenia.
Z twierdzenia Cramera wynika bowiem, że układ równań:
ma dokładnie jedno rozwiązanie.
Baza w przestrzeni 
- układ n wektorów liniowo niezależnych.
Baza kanoniczna w przestrzeni 
:
gdzie:
y
x 
Każdy wektor 
jest reprezentowany w bazie kanonicznej jako:
[-15, 28, 18] = 4[1, 2, 3] + 5 [-3, 4, 2] - 4[1, 0, 1] zatem wektor [-15, 28, 18] ma współrzędne 
w bazie B={ [1, 2, 3], [-3, 4, 2], [1, 0, 1]}
Znaleźć współrzędne wektora: 
w bazie złożonej z wektorów:
Oznaczamy szukane współrzędne przez x, y, z;
muszą one spełniać równanie:
x[1, 1, 0] + y[1, 0, 1] + z [0, 1, 1] = [-1, -2, 3]
a zatem: x + y = -1; x + z = -2; y + z = 3
skąd: x = -3, y = 2, z = 1
Wektor 
ma współrzędne [2, 1, -3] w bazie złożonej
z wektorów [2, 3, 0], [4, 2, 3], [1, 1, 1].
Obliczyć współrzędne wektora 
w bazie
[4, 0, 1], [0, 2, 3], [2, 1, 0].
Oznaczamy szukane współrzędne przez x, y, z
2[2, 3, 0] + [4, 2, 3] -3 [1, 1, 1] =
= x [4, 0, 1] + y[0, 2, 3] + z[2, 1, 0]
Otrzymujemy układ trzech równań z 3 niewiadomymi:
Postać macierzowa układu:
Jest to układ Cramera, gdyż wyznacznik macierzy głównej układu jest różny od zera, a zatem z twierdzenia Cramera rozwiązanie jest postaci
Jeżeli współrzędne wektora 
∈ R3 w kolejnych bazach wynoszą odpowiednio:
[x1, x2, x3] w bazie 
[y1, y2, y3] w bazie 
[z1, z2, z3] w bazie 
Przytoczymy jeszcze twierdzenie o równoliczności baz.
Jeśli jakakolwiek baza przestrzeni liniowej V
składa się z n wektorów to
każda inna baza v składa się również z n wektorów
|
Twierdzenie to pozwala zdefiniować wymiar przestrzeni liniowej ( ilość wektorów bazy ).
Niech zbiór wektorów 
będzie bazą przestrzeni V. Wówczas mówimy, że wymiar przestrzeni V wynosi n i piszemy dim( V )=n.
|
Wymiar jednoelementowej przestrzeni wektorowej zawierającej tylko wektor zerowy jest równy zero
tzn. 
Wymiar przestrzeni Rn wynosi n tzn. 
Podprzestrzeń liniowa R2 składająca się z wektorów [x,y] dla których y= -x ma wymiar 1.
Wymiar przestrzeni macierzy M3x4 wynosi 12.
Istnieją przestrzenie liniowe nieskończenie wymiarowe. Na przykład w przestrzeni B(I) funkcje fi(x) = xi są liniowo niezależne dla i=0,1,2,... , zatem przestrzeń ta nie jest skończenie wymiarowa.
Wówczas piszemy 
Dysponując współrzędnymi układu wektorów 
w dowolnej bazie 
możemy łatwo sprawdzić ich liniową niezależność.
Wówczas 
są liniowo niezależne 
R(A) = k
|
Współrzędne wektorów 
w bazie
B={ၛ1,0,0ၝ, ၛ1,1,0ၝ, ၛ1,1,1ၝ} wynoszą odpowiednio:
[2, 5, -1] [-1, 2, 3] [-5,-1, 2]
Sprawdzić, czy wektory 
są liniowo niezależne.
Macierz współrzędnych wektorów ma postać:
Stwierdzamy, że detA = - 62 ≠ 0 zatem R(A)=3
A więc wektory 
są liniowo niezależne.
Rozpatrzmy przestrzeń liniową V wymiaru n i niech:
będą dwiema różnymi bazami przestrzeni V.
Zapiszmy wektory nowej bazy B' jako kombinacje liniowe wektorów starej bazy B o współczynnikach pij:
...................................................
|
|
Macierzą przejścia od bazy B do bazy B' nazywamy macierz P= [pij], której kolejnymi kolumnami są współrzędne kolejnych wektorów bazy B' w bazie B.

jest bazą kanoniczną
B' = 
={[1,0,0],[1,1,0],[1,1,1]}
Wówczas macierz przejścia od bazy B do B' ma postać
Zatem w przypadku gdy B jest bazą kanoniczną w przestrzeni Rn, macierz przejścia od bazy kanonicznej do dowolnej bazy B' składa się z wektorów tej bazy ustawionych w kolumnach.
Wyraźmy teraz wektory bazy kanonicznej przez wektory 
:
Zatem odpowiednia macierz przejścia od bazy B' do bazy B
i jak łatwo sprawdzić: 
.
Jest to przypadek szczególny następującego stwierdzenia.
Jeśli P jest macierzą przejścia od bazy B do bazy B', to:
P jest macierzą odwracalną tzn. istnieje P -1
P -1 jest macierzą przejścia od bazy B' do bazy B.
|
Jeśli współrzędne wektora 
w bazie B są równe w1,...,wn to jego współrzędne w1',...,wn' w bazie B' spełniają równanie: 
gdzie P jest macierzą przejścia od bazy B do bazy B'.
|
Współrzędne wektora 
w bazie B' mają postać
Zatem 
Przestrzeń rozwiązań układu równań jednorodnych
Niech A=[aij] będzie macierzą mxn rzędu k i rozpatrzmy układ jednorodny równań liniowych
Niech S⊂ Rn będzie zbiorem wszystkich wektorów 
będących rozwiązaniem układu jednorodnego.
S jest podprzestrzenią liniową wymiaru n-k
|
Podobnie, dla układu niejednorodnego
Niech T będzie zbiorem rozwiązań tego układu i niech 
będzie dowolnym wektorem z T.
Dla każdego 
∈ T zachodzi 
|
Ze stwierdzenia wynika zatem, że wszystkie rozwiązania układu niejednorodnego otrzymujemy dodając do szczególnego rozwiązania tego układu wszystkie rozwiązania układu jednorodnego.
W szczególności, dla układu trzech równań zbiór rozwiązań może być zbiorem pustym, punktem, prostą lub płaszczyzną.
Stosując metodę eliminacji Gaussa stwierdzamy, że zbiorem rozwiązań układu jednorodnego są wektory postaci:
Łatwo sprawdzić, że wektor [1,1,1] jest rozwiązaniem układu niejednorodnego. Zatem ogólne rozwiązanie układu niejednorodnego ma postać:
[-4z + 1, 2z + 1, z + 1] dla z ∈ Rn.
Algebra Liniowa z Geometrią