1. Modelowanie - cele, etapy, zasady.
SFORMUŁOWANIE CELÓW
Pytanie po co to robię? Co chce zbadać, wykryć? Do czego będzie mi to służyć?
1.Opis i wyjaśnienie działania mechanizmu systemu - model FENOMELOGICZNY
2.Przewidywanie zachowania systemu w przyszłości i przy różnych warunkach, oddziaływanie na system - model PROGNOSTYCZNY.
3.Wybór właściwych oddziaływań WE spełniających określone warunki - model DECYZYJNY.
4.Wybór struktur, lub parametrów spełniającego określone zadania - model NORMATYWNY.
Ad1. Tworzenie Modeli i modelowanie.
Badamy system po to, żeby na niego oddziaływać. Musimy stworzyć opis/model takiego urządzenia, aby z niego korzystać.
Modelowanie: Przebadać model empirycznie, jak coś nie gra zmienić program, uprościć, skomplikować model. Im więcej powiązań z otoczeniem, z jakim dany obiekt funkcjonuje, tym bardziej skomplikowany (skomplikowane algorytmy itp.).
Tworzenie modeli:
I Przykład(hipotetyczny.)
x- ilość produkcji y- koszt
y = F(x) - model tego systemu (ekonomicznego)
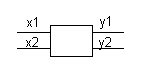
II Przykład: y1 = F(x1,x2)
2 wierze destylacyjne, y2 = F(x1,x2)
które mogą robić Podanie takiej
to samo zależności WE/WY
tj. podanie modelu
y1=a11x1 + a12x2
y2=a11x1 + a22x2
Czy jest to model dobry?
Nie wiem, będę musiał sprawdzić: weryfikacje, modulacje.
Ale uznaje, że ten model jest dobry. Jest to model liniowy. Jest to macierz kwadratowa, lub prostokątna w zależności od ilości WE i WY.
Model Statyczny - nie występuje czas, interesuje mnie obserwacja w danym momencie, jak stany znikną podczas badania, to efekt nas interesuje.
Y=Ax
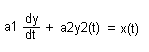
Model dynamiczny - występuje czas, stan aktualny zależy od stanów poprzednich.(np. wzrost produkcji i dynamika wzrostu)
a1,a2 > 0
Przykład : Model matematyczny opisujący prąd przemienny.
Do opisów modeli dynamicznych zawsze będzie potrzebne równanie różniczkowe
2. Sformułuj zadanie identyfikacji.
IDENTYFIKACJA, ROZPOZNAWANIE
(b. Specyficzna identyfikacja)
y1 = a11x1 + a12x2
y2 = a21x1 + a22x2
Mamy nieznane parametry:
a11=? a12=? a21=? a22=?
Algorytm identyfikacji - sposób na wyznaczenie tych parametrów.
Eksperyment:
BIERNY |
AKTYWNY |
W układzie krwionośnym nie można np. podwyższyć ciśnienia u pacjenta, bo umrze, Można u pacjenta zaobserwować ciśnienie np. dziś i jutro, mam 2 wyniki i je przetwarzam. |
Jeżeli sami możemy ustalić, zaplanować wejścia. Wykonuje doświadczenie. Np. Sam ustawiam WE. |
Identyfikacje przeprowadzamy w przypadku, kiedy znamy dokładny model systemu.
Przykład:
y1 = a11x1 + a21x2 X1,X2 - ilość surowców przerabianych w 2 agregatach
y2 = a21x1 + a22x2 Y1,Y2 - ilość produktu i kosztu produkcji
Y = AX
A = YX-1 - algorytm identyfikacji
A = Ψ (x1,x2,y1,y2)
_
y = Ø (x, a) zakładam sobie model z dokładnością parametrów
Ilość obserwacji WY zew. obiektu
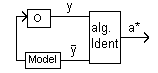
↓ ↓
n _ n
QI =∑ ( yi - yi )2 =(mają nie być różne od siebie)= ∑ ( yi - Ø(a1 xi ))2
i=1 i=1
↑
WY modelu (wylicze sobie)
Min Q(a) → a*
a
Obliczam I pochodną i sprawdzam I lub II warunek wystarczający istnienia min funkcji.
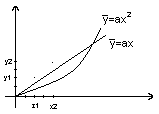
_
y = ax
_
y = ax2 - klasa modeli kwadratowa Obliczanie sumy
odl. od prostej
pomiary i-tego a
n n
QI = ∑ (y1 - Ø(a1xi))2 = ∑ (y1 - ax1)2
i=1 i=1
dQ n
― = ∑ 2(y1 - ax1) (-xi) = 0
da i=1
n
∑ (axi2 - xiyi) = 0
i=1
n n
a ∑ xi2 - ∑ xiyi = 0
i=1 i=1
n
∑ xiyi Algorytm identyfikacji wygląda dokładnie tak.
i=1 Model statyczny, liniowy.
a = ------------- Najlepsze rozwiązanie w miare minimalizacji danego kryterium
n
∑ xi2
i=1
3. Opisz zadanie analizy w sterowaniu systemem.
Analiza (Systemu) ilościowa:
Pytanie: Jak zachowuje się WE, kiedy zmieni się WE?
Dokonuje analizy działania systemu. Jak zachowuje się WY dla różnych WE, tj. zadanie ANALIZY.
W przypadku prostych układów wyliczenie y znając konkretne wartości parametrów.
DEF.
„Jeżeli znamy wartości liczb parametrów a11,a12,a21,a22 to wstawiamy dane x1,x2 do modelu i wyliczamy y1,y2.”
Analiza jakościowa:
Czy system ma pewne własności np. czy jest stabilny(pewne wielkości nie będą dążyć do nieskończoności).
5. Scharakteryzuj przyczyny właściwości dynamicznych systemów.
Model dynamiczny - występuje czas, stan aktualny zależy od stanów poprzednich.(np. wzrost produkcji i dynamika wzrostu)
a1,a2 > 0
Przykład : Model matematyczny opisujący prąd przemienny.
Do opisów modeli dynamicznych zawsze będzie potrzebne równanie różniczkowe
6. Omów pojęcie stanu układu dynamicznego
Stan systemu dynamicznego :
Jest to najmniejsza liczba danych(wektor stanu), których znajomość danej chwili, przy znajomości wielkości WE, począwszy od tej chwili pozwala jednoznacznie określić stan i wielkości WY systemu w przyszłości.
Zdeterminowanie systemu wynika z postulatów: przyczynowości, zupełności.
Ilość zmiennych stałych, które określają położenie danego
Obiektu jest różna.
1 i 2 wpływa na 3 i 4
Więc systemy są zdeterminowane, znając stan WE można
Obliczyć WY.
Postulat przyczynowości:
Not: Dopóki WE stanu jest takie same, to sterowanie tez takie
same => przyczyna zmiany stanu.
Postulat zupełności:
Not: Zmian jest jednoznaczna w odwrotną stronę. Kiedy WE stanu jest takie same, to sterowanie różne, natomiast jak sterowanie takie same, to WE stanu też
Przykład:
Zbiornik wody - stopień zapełnienia:
Dx(t)
------ = u(t) - y(t)
dt
↑ ↑ ↑
WE WY
prędkość zmiany co wpływa do to co wypłynęło, już
stanu(pochodna) wykonania wypływa
(tutaj woda,
deszcz)
y(y) = y(x(t))
wyznaczam x(t):
t t
x(t) = ∫ u(t)dt - ∫ y(t)dt
0
Całka oznaczona - suma wielkości, sumowanie przebiegu, który zmienia się w czasie
Całka - sumowanie, czyli uwzględnienie tego , co było po drodze.
8. Omów na przykładzie opis w postaci transmitancji.
Transmisją operatorową:
G(s) liniowym układu (Obiektu) liniowego stacjonarnego nazywać będziemy wartość określoną jako stosunek transformaty wymuszenia U(s) tego układu przy zerowych warunkach początkowych. G(s) =Y(s) / U(s)
9. Omów na przykładzie odpowiedź skokową układu.
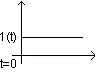
Charakterystyką(Odpowiedzią) skokową:
H(t) jednowymiarowego układu (obiektu) liniowego stacjonarnego, nazywać będziemy odpowiedź tego układu na wymuszenie w postaci jednostkowej funkcji skokowej 1(t), przy zerowych warunkach początkowych.
←impuls
10. Omów na przykładzie odpowiedź impulsową układu.
Charakterystyką( Odpowiedzią) Impulsową
G(t)liniowym układu( Obiektu) liniowego, stacjonarnego nazywać będziemy odpowiedź tego układu na wymuszenie w postaci funkcji Diraca (t), przy zerowych warunkach początkowych.

δ(t) ←impuls o nieskończonej amplitudzie, duży impuls,
o dużym czasie trwania.
11. Człon inercyjny
CZŁON INERCYJNY:
(piec)
(Jak funkcja określona w czasie
I - pochodna mówi o prędkości zmian
II - pochodna o przyspieszeniu)
.
Równanie różniczkowe WE/WY: Ty + y = ku
k - współczynnik wzmocnienia określany jako stosunek odpowiedzi y do wymuszenia u w stanie ustalonym.

T - stała czasowa.
Charakterystyka skokowa:
h(t) = k( 1 - ex [(-1)/T]) 1(t)
Odpowiedź impulsowa:

g(t) = K/T ex [(-1)/T] 1(t)
Transmitacja:
k
Gs =
1 + sT
kierunek przepływu prądu
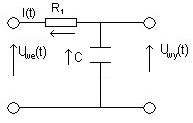
**Przykład 1:
CZWÓRNIK RC
Nieobciążony.
Uwe(t) = RI(t) + 1/C ∫ I(t) dt
Uwe(t) = RI(t) + Uwy(t)
Uwy(t) = 1/C ∫ I(t) dt
d Uwy(t) 1
= * I(t) tj. funkcja czasu
dt C
RC d Uwy
Uwe(t) = . * + Uwy
T y + y dt
Oznacza to, że jak włącze napięcie na WY nie pojawi się niezwłocznie, tylko będzie narastać.
Im stała czasowa mniejsza, tym szybciej zostanie osiągnięty stan przez WY.
**Przykład 2:
ELEMENT GRZEWCZY:
P - moc jest funkcją czasu P(t); energia dostarczana do grzejnika
dt - mały czas (delta t) energia ta rozkłada się na ciepło
dodawane i wydalane
P(t)dt = c*m *d Θ(t) + α
S Θ dt α - stała
S - powierzchnia grzejnika
Θ - ilość ciepła proporcjonalna do
To co się kumuluje to co się rozprasza temp, zmienia się w czasie
w grzejniku
Mamy bilans cieplny:
P(t)dt = c*m*d Θ(t) + αS*Θ(t) dt
1 c*m d*Θ(t) .
* P(t) = * + Θ(t) k*u(t) = T * y + y
α*S α * S dt
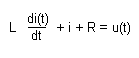
**Przykład 3:
GENERATOR
PRĄDU STAŁEGO
Nieobciążony
Iu(t) - prąd wzbudzenia
d*I*w(t)
L + R*I*w(t) = Uw(t)
dt
d*E(t) d*I(t)
= K
dt dt
L d*e(t) R
* + E(t) = Uw(t)
K dt K
Podsumowanie:
Co uzyskujemy?
Układy o różnych naturach podlegają pod te same równania jak odrzuce skale i jednostkę MATEMATYKA jest wszędzie.
12. Człon całkujący z inercją,
CZŁON CAŁKUJĄCY Z INERCJĄ
.. .
Równanie różniczkowe WE - WY: Ty + y = ku
K - współczynnik wzmocnienia prędkościowego określany jako stosunek pochodnej odpowiedzi y do wymuszenia u w stanie ustalonym
T - stała czasowa
Charakterystyka skokowa:
t
h(t) = (kt - kT ( 1-exp [- ] ) ) 1(t) układ będzie dążył do całki
idealnej.
T
Odpowiedź impulsowa:
t
h(t) = k [ 1-exp [- ] ] 1(t)
T
K
Transmitacja: g(s) =
S(1+sT)
Przykłady:
1. OBCOWZBUDNY SILNIK PRĄDU STAŁEGO
Założenia: silnik nieobciążony, uwzględniamy tylko bezwładność
We - napięcie twornika
Wy - kąt położenia wału silnika
Ω(t) (WY - położenie kątowe)
α(t)
Ø - strumień jednego z uzwojeń
Const
DI(t)
U(t) = Rt * I(t) + Lt E(t)
dt
pomijam(małe)
dΩ(t)
Mn(t) - Mz(t) = I Mn(t) = Cm * Ø * I(t)
dt
Chcemy powiązać 2 wielkości: α(t) i U(t)
d α(t)
= Ω(t) No i manipulujemy, aby była zależność α(t) do U(t)
dt
dΩ(t)
Cm Ø Ω(t) * I(t) = J
dt
U(t) = Rt * I(t) + CE Ø Ω(t)
J dΩ(t)
I(t) = *
CM Ø dt
Rt * J d2 α dα
U(t) = * + CEØ
CmØ dt2 dt
13. Człon różniczkujący z inercją
CZŁON RÓŻNICZKUJĄCY Z INERCJĄ
(rzeczywisty człon różniczkujący)
. .
Równanie różniczkujące WE-WY: Ty + y = ku
K - współczynnik wzmocnienia określany jako odpowiedź y do pochodnej wymuszenia u w stanie ustalonym
T - stała czasowa
k 1
Charakterystyka skokowa: h(t)= exp ( - ) 1(t)
T T
Odpowiedź impulsowa: k k 1
g(t)= δ(t) - exp( - ) 1(t)
T T2 T
ks
Transmitacja: g(s) =
1+sT
Przykład:
CZWÓRNIK R,L d I(t)
Uwe(t) = R * I(t) + L =
dt
= R I(t) + Uwy(t)
dI(t)
Uwy(t) = L
dt
d Uwe(t) d I(t) d Uwy(t)
= R +
dt dt dt
Równanie końcowe:
d Uwe R d Uwy . .
= * Uwy(t) + => u = k * y + y
dt L dt
Przykład **:
TRANSFORMATOR :
d I1
U1 = RI1 + L1
dt .
I
d I1
U2 = M
dt
. . ..
U1 = R1 I1 + L1 I
. R L1 .
U1 = U2 + U2 / M/R
M M
M . L1 .
U1 = U2 + U2
R R1
K T
14. Człon oscylacyjny,
CZŁON OSCYLACYJNY
Odpowiada na wymuszenie
1. Tłumione
2.Nie Tłumione
3. Narastanie.
DOPISAC PRZYKŁAD
15. Człon opóźniający
CZŁON OPÓŹNIAJĄCY
Równanie różniczkowe: y(t) = ku( t - T0)
K - współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u dla
t >T0
T0 - czas opóźnienia
Charakterystyka skokowa: h(t) = k 1(t - T0)
Odpowiedź impulsowa: g(t) = kδ(t - T0)
Transmitacja: g(s) = ex (-sT0)
Wyszukiwarka
Podobne podstrony:
wyklad(1), Politechnika Wrocławska - Materiały, teoria systemow
wyklad(1), Politechnika Wrocławska - Materiały, teoria systemow
sciaga(1), Politechnika Wrocławska - Materiały, teoria systemow
sciaga2(1), Politechnika Wrocławska - Materiały, teoria systemow
sciaga(1), Politechnika Wrocławska - Materiały, teoria systemow
tits(1), Politechnika Wrocławska - Materiały, teoria systemow
SYS8 Opis Systemu(1), Politechnika Wrocławska - Materiały, teoria systemow
czlon rozniczkujacy(1), Politechnika Wrocławska - Materiały, teoria systemow
lista pytan(1), Politechnika Wrocławska - Materiały, teoria systemow
203 rejestry, Politechnika Wrocławska - Materiały, logika ukladow cyfrowych, sprawozdania
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
Spraw1(1), Politechnika Wrocławska - Materiały, fizyka 2, paczka 1, piknometr
sprawko8dobre(1), Politechnika Wrocławska - Materiały, fizyka 2, paczka 2, sprawko 8
Fizyka lab. cw77(1), Politechnika Wrocławska - Materiały, fizyka 2, paczka 1, fizyka-lab
gulczas 2001 opracowanie, Politechnika Wrocławska - Materiały, architektura komputerow 2, egzamin, o
więcej podobnych podstron