Rozdział 4
Czwórniki
4.1. Równania i parametry czwórników - pojęcia podstawowe
4.1.1. Podstawowe określenia
Czwórniki to obwody elektryczne mające dostępne cztery zaciski: zaciski (pierwotne) wejściowe (oznaczone 1, 1', Rys. IV.1) oraz dwa zaciski (wtórne) wyjściowe - (oznaczone 2, 2'). Jeśli nie zawierają źródeł energii to nazywane są pasywnymi. Prąd i1 oraz napięcie u1 są parametrami wejściowymi, a prąd i2 i napięcie u2 - wyjściowymi.
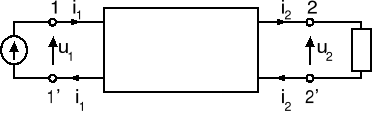
Rys. IV.1. Czwórnik elektryczny
Przykładem czwórników pasywnych są dwuprzewodowe linie przesyłowe, transformatory itp., które można przedstawiać w postaci czwórników typu Γ, T, Π lub X. Nazwy te wynikają z połączeń elementów czwórnika do odpowiednich liter.


Rys. IV.2. Czwórniki typu: a) Γ; b) T, c) Π, d) X
4.1.2. Równania czwórnika pasywnego
Równanie łańcuchowe
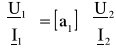
Równanie zwane łańcuchowym przedstawia się w postaci macierzowej,
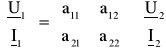
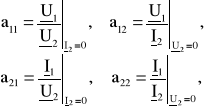
Macierz kwadratowa [a] czwórnika nazywa się macierzą łańcuchową, lub typu „a”. Jej elementy wyznacza się, rozpatrując stan jałowy ![]()
oraz stan zwarcia ![]()
czwórnika, a mianowicie
Połączenie łańcuchowe
Połączenie łańcuchowe czwórników to takie, w którym zaciski wyjściowe jednego czwórnika dołączone są do zacisków wejściowych czwórnika następnego. Poniższy rysunek przedstawia połączenie łańcuchowe trzech czwórników
Rys. IV.3. Połączenie łańcuchowe trzech czwórników
Dla powyższego połączenia obowiązują równania:
,
, 
,
skąd otrzymuje się macierz łańcuchową zastępczą dla połączenia łańcuchowego ![]()

Równanie impedancyjne
Równanie to można przedstawić w postaci macierzowej następująco:
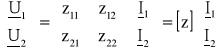
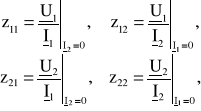
Współczynniki macierzy [z] zwanej impedancyjną, oblicza się rozpatrując stan jałowy przy zasilaniu strony pierwotnej ![]()
oraz stan jałowy przy zasilaniu strony wtórnej ![]()
:
Równanie admitancyjne
Równanie to można przedstawić w postaci macierzowej następująco:
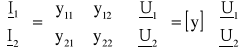
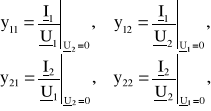
Elementy macierzy admitancyjnej [y] wyznacza się, rozpatrując stan zwarcia strony wyjściowej ![]()
oraz strony wejściowej ![]()
czwórnika:
W/w elementy y mają wymiar admitancji. Z tego powodu macierz admitancyjną nazywa się macierzą „y”.
Równanie mieszane
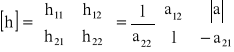
Czasami do opisu czwórników stosuje macierz mieszaną [h]. Elementy tej macierzy określa się, rozpatrując stan zwarcia strony wyjściowej (U2=0) oraz stan jałowy strony wejściowej (I1=0), a mianowicie
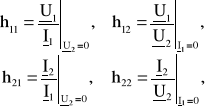
![]()
Wówczas równanie mieszane dla czwórnika można zapisać następująco
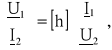
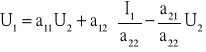
gdzie macierz kwadratowa [h] może być obliczona na podstawie znajomości parametrów macierzy łańcuchowej:
4.1.3. Zależności między parametrami macierzy [a] [z] [y] [h]
Często podawane są parametry jednej macierzy czwórnika, należy określić inne parametry. Wówczas korzysta się z równań definicyjnych lub (jak w przypadku macierzy [z] oraz [y]) oblicza się macierz odwrotne ![]()
oraz ![]()
. W większości przypadków należy wyznaczyć wyznaczniki ![]()
, ![]()
, ![]()
, ![]()
, macierzy czwórnika.
|
a |
z |
y |
h
|
a |
|
|
|
|
z |
|
|
|
|
y |
|
|
|
|
h |
|
|
|
|
4.1.4. Przekładnia napięciowa, prądowa i mocy
Przekładnia napięciową i prądowa czwórnika zdefiniowane są jako ilorazy wartości zespolonych napięć U1/U2 i prądów I1/12 . W przypadku obciążenia falowego czwórnika symetrycznego przekładnie: napięciowa i prądowa czwórnika są sobie równe.
Przekładnią mocy czwórnika nazywamy iloraz S1/S2 mocy zespolonych na wejściu i na wyjściu czwórnika.
156
![]()
![]()
![]()
![]()
![]()
![]()
2
2'
![]()
1
![]()
1'
[a3]
[a2]
[a1]
Wyszukiwarka
Podobne podstrony:
Rozdzial 5 ObwodyTrojfazowe teoria2, Elektra
Rozdzial 5 ObwodyTrojfazowe teoria1, Elektra
Rozdzial 5 ObwodyTrojfazowe teoria3, Elektra
Rozdzial 1 ObwodyPraduStalego teoria, Elektra
Rozdzial 7 PradniceSilniki teoria, Elektra
Rozdzial 3 ObwodyZawCewMagnSprzez teoria, Elektra
Teoria(3), elektronika
Teoria z Elektrotechniki, Teoria 3
Teoria z Elektrotechniki, 2 Kanały Radiowe, Kanały Radiowe (cyfrowe)
04 Rozdział 03 Teoria mocy
Teoria z Elektrotechniki, Teoria 2
Teoria z Elektrotechniki, 5 Kanały przewodowe, Przewody Telekomunikacyjne
elektronika teoria, elektronika
Czwórniki v5, Elektrotechnika
CZWÓRNIK, Automatyka i elektronika, Elektrotechnika - semestr 4
Teoria(6), elektronika
Teoria(9), elektronika
więcej podobnych podstron