Politechnika Lubelska Wydział Mechaniczny |
Temat: Drgania |
Wykonali: Bartłomiej Kadłubek Szymon Kamiński |
|
|
|
Grupa: GL04 |
Data: 09.03.2015r |
|
|
1.Wstęp teoretyczny
Drganiami- nazywa się zmiany wielkości fizycznej występujące w funkcji czasu i polegające na tym, że jej wartości są na przemian rosnące i malejące względem pewnego poziomu odniesienia. Wibracje (drgania mechaniczne) to niskoczęstotliwościowe drgania akustyczne rozprzestrzeniające się w ośrodkach stałych.
Wibracje w wielu przypadkach są czynnikiem roboczym, celowo wprowadzanym przez konstruktorów do maszyn czy urządzeń jako niezbędny element do realizacji zadanych procesów technologicznych jak np. wibrorozdrabnianie, czyszczenie i mielenie wibracyjne oraz także do :kruszenia, wiercenia, drążenia, szlifowania. Wibracje są również często źródłem informacji odnośnie stanu technicznego maszyny i jakości jej wykonywania, jak również mogą powodować zakłócenia w prawidłowym działaniu maszyn i innych urządzeń, zmniejszać ich trwałość i niezawodność oraz niekorzystnie wpływać na konstrukcje i budowle. Przenoszone drogą bezpośredniego kontaktu z drgającym źródłem do organizmu człowieka mogą też wywierać ujemny wpływ na zdrowie pracowników i doprowadzić niejednokrotnie do trwałych zmian chorobowych. W punktu ochrony i bezpieczeństwa człowieka w środowisku pracy, wibracje są szkodliwym czynnikiem fizycznym, który należy eliminować lub przynajmniej ograniczać.

Częstotliwość (częstość) - wielkość fizyczna określająca liczbę cykli zjawiskaokresowego występujących w jednostce czasu. W układzie SI jednostką częstotliwości jest herc (Hz). Częstotliwość 1 herca odpowiada występowaniu jednego zdarzenia (cyklu) w ciągu 1 sekundy. Najczęściej rozważa się częstotliwość w ruchu obrotowym, częstotliwość drgań, napięcia, fali.
W fizyce częstotliwość oznacza się literą f lub grecką literą ν. Z definicji wynika wzór:
gdzie: f- częstotliwość, n - liczba drgań, t- czas, w którym te drgania zostały wykonane.
Przy pomiarach ruchu drgającego może nas interesować przebieg przemieszczenia x, prędkości v lub przyspieszenia a w funkcji czasu. Wielkości te są ze sobą związane następującymi zależnościami:
Przyspieszenie:
Wartość średnia:
Wartość skuteczna:
Wartość skuteczna - określa parametry energetyczne sygnału. W elektrotechnice najczęściej podajemy tę właśnie wartość (jeżeli mowa jest o prądzie lub napięciu zmiennym bez dodania określeń: średnie, chwilowe, maksymalne itp. - oznacza to, że mowa jest o wartości skutecznej).
Materiały piezoelektryczne - kryształy, w których obserwowane jest zjawisko piezoelektryczne, polegające na pojawieniu się pod wpływem naprężeń mechanicznych ładunków elektrycznych na ich powierzchni.
Piezoelektryki przejawiają również odwrotne zjawisko piezoelektryczne, polegające na zmianie wymiarów kryształu pod wpływem przyłożonego pola elektrycznego.
Czujnik piezoelektryczny - zwany też przetwornikiem piezoelektrycznym - czujnik wykorzystujący zjawisko piezoelektryczne dla przetworzenia zmian kształtu lub sił nań działających na napięcie elektryczne. Znajduje zastosowanie w układach zamiany i pomiaru sił, ciśnienia, prędkości i drgań.
Działanie opiera on się na zjawisku piezoelektrycznym, gdzie ładunek elektryczny usytuowany jest na ściankach kryształu przy deformacji, natomiast zmiana odkształcenia kryształu powoduje zmianę znaku ładunku na przeciwny. Jest to jedno ze zjawisk wykorzystanych w tych czujnikach, drugim zjawiskiem jest tzw. „zjawisko odwrotne” czyli jeśli przyłożymy napięcie do kryształu nastąpi odkształcenie-zmiana wymiaru.
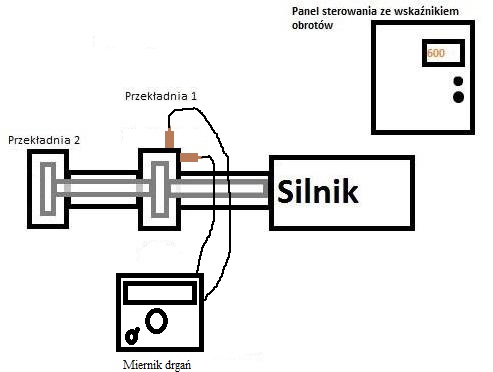
2. Schemat stanowiska
3. Przebieg wykonywanego ćwiczenia
Ćwiczenie polegało na pomiarze drgań przenoszonych przez wewnętrzną przekładnię. Silnik pracował z ustaloną ilością obrotów na minutę wykonując ruch obrotowy.
Pomiaru drgań dokonywało się miernikiem podłączonym do czujnika który podczas pierwszego pomiaru znajdował się w położeniu poziomym zaś podczas drugiego pomiaru w położeniu pionowym. . Celem tego ćwiczenia było sprawdzenie czy położenie czujnika znacząco wpływa na wyniki oraz czy emitowany hałas ma jakiś związek z drganiami.
Tabela wyników
Lp. |
n[min-1] |
aPK [G] |
aRMS [G] |
vPK [inch / s] |
hPK-PK [mm] |
aPK[m/s2] |
aRMS[m/s2] |
VPK[m/s] |
1 |
275 |
0,25 |
0,18 |
0,081 |
1,82 |
2,45 |
1,77 |
0,0020574 |
2 |
300 |
0,26 |
0,19 |
0,087 |
2,08 |
2,55 |
1,86 |
0,0022098 |
3 |
400 |
0,31 |
0,22 |
0,105 |
3,01 |
3,04 |
2,16 |
0,0026670 |
4 |
500 |
0,44 |
0,31 |
0,200 |
6,06 |
4,32 |
3,04 |
0,0050800 |
5 |
600 |
0,63 |
0,44 |
0,095 |
2,25 |
6,18 |
4,32 |
0,0024130 |
6 |
700 |
0,79 |
0,57 |
0,150 |
4,02 |
7,75 |
5,59 |
0,0038100 |
7 |
800 |
1,09 |
0,77 |
0,377 |
8,79 |
10,69 |
7,55 |
0,0095758 |
8 |
900 |
1,28 |
0,92 |
0,246 |
5,66 |
12,56 |
9,03 |
0,0062484 |
9 |
1000 |
1,43 |
1,01 |
0,229 |
6,56 |
14,03 |
9,91 |
0,0058166 |
10 |
1100 |
2,03 |
1,43 |
0,160 |
2,43 |
19,92 |
14,03 |
0,0040640 |
11 |
1200 |
2,15 |
1,54 |
0,187 |
1,27 |
21,09 |
15,11 |
0,0047498 |
Tabela 1 - czujnik w położeniu poziomym
Lp. |
n[min-1] |
aPK [G] |
aRMS [G] |
vPK [inch / s] |
hPK-PK [mm] |
aPK[m/s2] |
aRMS[m/s2] |
VPK[m/s] |
1 |
275 |
0,19 |
0,13 |
0,032 |
0,19 |
1,86 |
1,28 |
0,0008128 |
2 |
300 |
0,20 |
0,15 |
0,034 |
0,28 |
1,96 |
1,47 |
0,0008636 |
3 |
400 |
0,29 |
0,20 |
0,037 |
0,28 |
2,84 |
1,96 |
0,0009398 |
4 |
500 |
0,36 |
0,27 |
0,034 |
0,29 |
3,53 |
2,65 |
0,0008636 |
5 |
600 |
0,45 |
0,32 |
0,051 |
0,41 |
4,41 |
3,14 |
0,0012954 |
6 |
700 |
0,64 |
0,45 |
0,083 |
0,46 |
6,28 |
4,41 |
0,0021082 |
7 |
800 |
0,87 |
0,62 |
0,079 |
0,36 |
8,53 |
6,08 |
0,0020066 |
8 |
900 |
0,91 |
0,63 |
0,065 |
0,36 |
8,93 |
6,18 |
0,0016510 |
9 |
1000 |
1,32 |
0,90 |
0,084 |
0,57 |
12,95 |
8,83 |
0,0021336 |
10 |
1100 |
1,35 |
0,95 |
0,108 |
1,11 |
13,24 |
9,32 |
0,0027432 |
11 |
1200 |
1,67 |
1,18 |
0,130 |
1,14 |
16,38 |
11,57 |
0,0033020 |
Tabela 2 - czujnik w położeniu pionowym
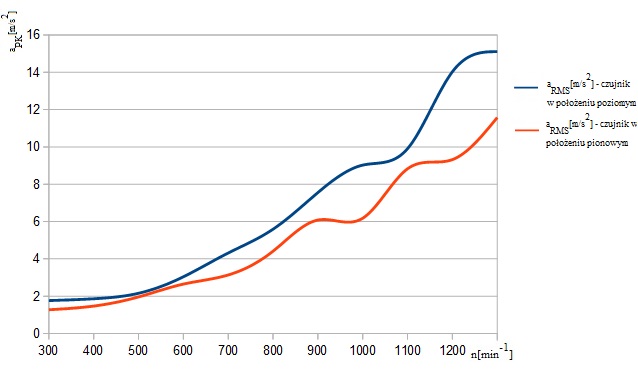
5. Wnioski
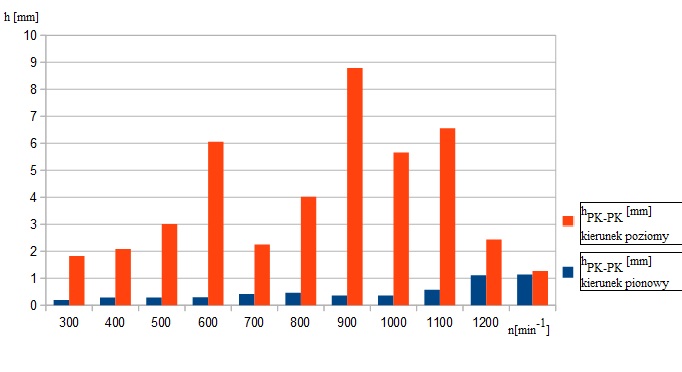
Na podstawie otrzymanych wyników zauważamy, że wysokość drgań była znacznie większa w całym zakresie obrotów gdy czujnik znajdował się w położeniu poziomym. Wynika to z tego, że obracająca się przekładnia ma większą tendencję do odchyleń na boki niż góra-dół.
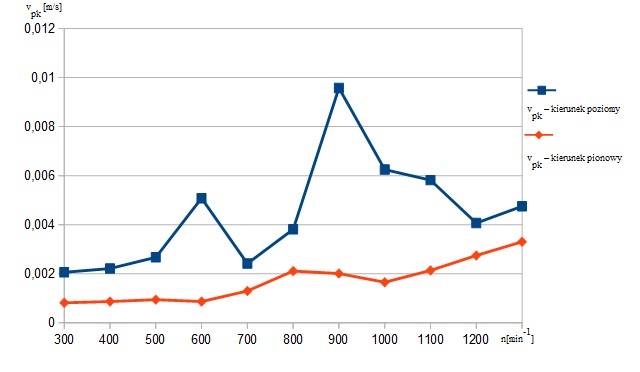
Potwierdza to także zbadana przez nas prędkość drgań. Jest ona wyższa w całym zakresie obrotów dla czujnika w położeniu poziomym.
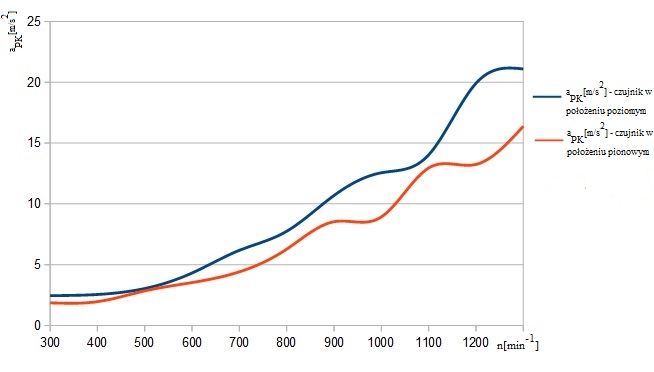
Przyspieszenia również były w wyższe gdy mierzyliśmy je w położeniu poziomym, ale w tym przypadku wartości były już o wiele bardziej zbliżone do pomiarów wykonanych w pionowym położeniu czujnika.
Wyszukiwarka
Podobne podstrony:
293
Hs-293, DOC
2 (293)
2015 07 21 Dec nr 293 MON WKU Ostrołęka odznaka pamiątkowa
293 , Praca zaliczeniowa z Psychologii i Socjologii Zarządzania
highwaycode pol c15 roboty drogowe (s 96 97, r 288 293)
293 a
GN SPR 3, 2.uchwała-w-sprawie-przystapienia, UCHWAŁA NR XXIII/293/16
293
293
292 293 id 32246 Nieznany
292 i 293, AP
293
KSH, ART 293 KSH, II CSK 118/08 - wyrok z dnia 24 września 2008 r
293
293
293 Manuskrypt przetrwania
293
plik (293)
więcej podobnych podstron