POLITECHNIKA LUBELSKA |
Laboratorium napędu elektrycznego |
||||
|
Ćwiczenie nr 20 |
||||
Nazwisko:
|
Imię:
|
Semestr: VI |
Grupa: ED 6.3 |
Rok akademicki: 2009/2010 |
|
Temat ćwiczenia: |
Regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego. |
Data wykonania: 9.03.2010r |
Ocena: |
||
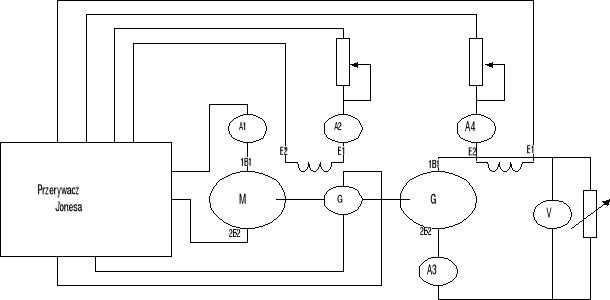
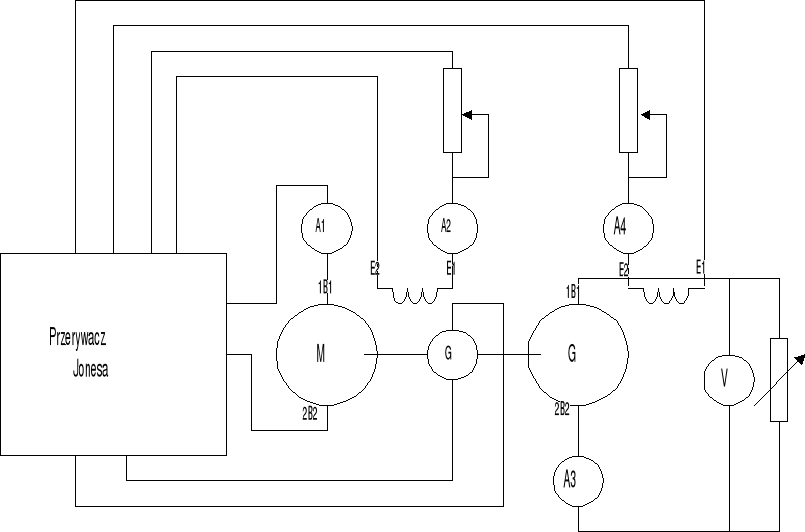
Rys.1 Schemat układu pomiarowego
Dane znamionowe elementów układu:
Prądnica: Silnik:
IN =6,25A IN =6,15A
PN =1,1kW PN =1,1kW
n = 1500obr/min n = 1500obr/min
IW = 0,29A IW =0,23A
UN =220V UN =220V
1.Wyznaczanie charakterystyk mechanicznych silnika obcowzbudnego zasilanego impulsowo.
a) układ otwarty
Tabela 1 a = 0,2
Lp. |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
Rrt |
ΔP0 |
ΔPobc |
n |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
Ω |
W |
W |
Obr/min |
1 |
1 |
200 |
0,7 |
195 |
0,0 |
0,0 |
84,00 |
140 |
134,4 |
0,63 |
10,00 |
84,00 |
0,00 |
1284 |
2 |
|
190 |
1,2 |
175 |
0,5 |
87,5 |
64,48 |
130 |
124,8 |
1,22 |
5,90 |
63,00 |
1,48 |
1192 |
3 |
|
160 |
1,6 |
150 |
1,0 |
150,0 |
65,73 |
110 |
105,6 |
2,04 |
4,73 |
61,00 |
4,73 |
1009 |
4 |
|
150 |
2,1 |
130 |
1,5 |
195,0 |
62,11 |
100 |
96,0 |
2,68 |
4,05 |
53,00 |
9,11 |
917 |
5 |
|
140 |
2,5 |
120 |
2,0 |
240,0 |
60,72 |
90 |
86,4 |
3,48 |
3,68 |
46,00 |
14,72 |
825 |
6 |
|
130 |
3 |
105 |
2,5 |
262,5 |
65,88 |
85 |
81,6 |
4,02 |
3,50 |
44,00 |
21,88 |
780 |
7 |
|
125 |
3,5 |
95 |
3,0 |
285,0 |
72,42 |
80 |
76,8 |
4,65 |
3,38 |
42,00 |
30,42 |
734 |
8 |
|
110 |
4,4 |
75 |
4,0 |
300,0 |
85,00 |
70 |
67,2 |
5,73 |
3,25 |
33,00 |
52,00 |
642 |
9 |
|
100 |
5,3 |
60 |
5,0 |
300,0 |
105,00 |
60 |
57,6 |
7,03 |
3,20 |
25,00 |
80,00 |
550 |
10 |
|
100 |
5,5 |
60 |
5,2 |
312,0 |
110,99 |
60 |
57,6 |
7,34 |
3,18 |
25,00 |
85,99 |
550 |
Tabela 2 a = 1,13
Lp. |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
Rrt |
ΔP0 |
ΔPobc |
n |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
Ω |
W |
W |
Obr/min |
1 |
3 |
230 |
0,8 |
220 |
0 |
0 |
100,00 |
160 |
153,6 |
0,65 |
10,00 |
100,00 |
0,00 |
1468 |
2 |
|
230 |
1,3 |
215 |
0,5 |
107,5 |
101,48 |
160 |
153,6 |
1,36 |
5,90 |
100 |
1,48 |
1468 |
3 |
|
230 |
1,75 |
210 |
1 |
210 |
101,73 |
155 |
148,8 |
2,09 |
4,73 |
97 |
4,73 |
1422 |
4 |
|
230 |
2,2 |
205 |
1,5 |
307,5 |
106,11 |
155 |
148,8 |
2,78 |
4,05 |
97 |
9,11 |
1422 |
5 |
|
230 |
2,7 |
200 |
2 |
400 |
111,72 |
155 |
148,8 |
3,44 |
3,68 |
97 |
14,72 |
1422 |
6 |
|
230 |
3,2 |
200 |
2,5 |
500 |
107,88 |
150 |
144 |
4,22 |
3,50 |
86 |
21,88 |
1376 |
7 |
|
230 |
3,6 |
195 |
3 |
585 |
116,42 |
150 |
144 |
4,87 |
3,38 |
86 |
30,42 |
1376 |
8 |
|
225 |
4,6 |
185 |
4 |
740 |
138,00 |
150 |
144 |
6,10 |
3,25 |
86 |
52,00 |
1376 |
9 |
|
225 |
5,6 |
180 |
5 |
900 |
166,00 |
150 |
144 |
7,40 |
3,20 |
86 |
80,00 |
1376 |
10 |
|
225 |
6,6 |
170 |
6 |
1020 |
200,48 |
150 |
144 |
8,48 |
3,18 |
86 |
114,48 |
1376 |
Tabela 3 a = 1,5
Lp. |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
Rrt |
ΔP0 |
ΔPobc |
n |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
Ω |
W |
W |
Obr/min |
1 |
5 |
230 |
0,8 |
220 |
0 |
0 |
100,00 |
160 |
153,6 |
0,65 |
10,00 |
100,00 |
0,00 |
1468 |
2 |
|
230 |
1,3 |
215 |
0,5 |
107,5 |
101,48 |
160 |
153,6 |
1,36 |
5,90 |
100 |
1,48 |
1468 |
3 |
|
230 |
1,7 |
210 |
1 |
210 |
102,73 |
158 |
151,68 |
2,06 |
4,73 |
98 |
4,73 |
1449 |
4 |
|
230 |
2,2 |
205 |
1,5 |
307,5 |
106,11 |
155 |
148,8 |
2,78 |
4,05 |
97 |
9,11 |
1422 |
5 |
|
230 |
2,7 |
200 |
2 |
400 |
111,72 |
155 |
148,8 |
3,44 |
3,68 |
97 |
14,72 |
1422 |
6 |
|
230 |
3,2 |
200 |
2,5 |
500 |
109,88 |
152 |
145,92 |
4,18 |
3,50 |
88 |
21,88 |
1394 |
7 |
|
226 |
3,6 |
195 |
3 |
585 |
117,42 |
151 |
144,96 |
4,85 |
3,38 |
87 |
30,42 |
1385 |
8 |
|
225 |
4,5 |
185 |
4 |
740 |
138,00 |
150 |
144 |
6,10 |
3,25 |
86 |
52,00 |
1376 |
9 |
|
225 |
5,6 |
180 |
5 |
900 |
166,00 |
150 |
144 |
7,40 |
3,20 |
86 |
80,00 |
1376 |
10 |
|
223 |
6,6 |
170 |
6 |
1020 |
200,48 |
150 |
144 |
8,48 |
3,18 |
86 |
114,48 |
1376 |
b) układ zamknięty
Tabela 4 a = 0,2
Lp. |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
Rrt |
ΔP0 |
ΔPobc |
n |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
Ω |
W |
W |
Obr/min |
1 |
1 |
185 |
1,3 |
175 |
0,5 |
87,5 |
65,50 |
130 |
124,8 |
1,23 |
10,00 |
63,00 |
2,50 |
1192,36 |
2 |
|
150 |
1,7 |
140 |
1 |
140,0 |
60,73 |
105 |
100,8 |
1,99 |
4,73 |
56,00 |
4,73 |
963,06 |
3 |
|
130 |
2,1 |
110 |
1,5 |
165,0 |
53,11 |
85 |
81,6 |
2,67 |
4,05 |
44,00 |
9,11 |
779,62 |
4 |
|
115 |
2,5 |
95 |
2 |
190,0 |
48,72 |
75 |
72,0 |
3,32 |
3,68 |
34,00 |
14,72 |
687,90 |
5 |
|
105 |
3 |
80 |
2,5 |
200,0 |
51,88 |
65 |
62,4 |
4,04 |
3,50 |
30,00 |
21,88 |
596,18 |
6 |
|
105 |
3,4 |
75 |
3 |
225,0 |
60,42 |
65 |
62,4 |
4,57 |
3,38 |
30,00 |
30,42 |
596,18 |
7 |
|
105 |
4,4 |
70 |
4 |
280,0 |
82,00 |
65 |
62,4 |
5,80 |
3,25 |
30,00 |
52,00 |
596,18 |
8 |
|
105 |
5,3 |
65 |
5 |
325,0 |
105,00 |
60 |
57,6 |
7,47 |
3,20 |
25,00 |
80,00 |
550,32 |
9 |
|
100 |
5,7 |
55 |
5,5 |
302,5 |
121,20 |
60 |
57,6 |
7,36 |
3,18 |
25,00 |
96,20 |
550,32 |
Tabela 5 a = 0,48
Lp. |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
Rrt |
ΔP0 |
ΔPobc |
n |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
Ω |
W |
W |
Obr/min |
1 |
3 |
180 |
3,1 |
150 |
2,5 |
375,0 |
83,88 |
120 |
115,2 |
3,98 |
3,50 |
62,00 |
21,88 |
1100,64 |
2 |
|
180 |
3,6 |
150 |
3 |
450,0 |
92,42 |
120 |
115,2 |
4,71 |
3,38 |
62,00 |
30,42 |
1100,64 |
3 |
|
180 |
4,6 |
140 |
4 |
560,0 |
114,00 |
120 |
115,2 |
5,85 |
3,25 |
62,00 |
52,00 |
1100,64 |
4 |
|
180 |
5,5 |
135 |
5 |
675,0 |
142,00 |
120 |
115,2 |
7,09 |
3,20 |
62,00 |
80,00 |
1100,64 |
5 |
|
175 |
6 |
125 |
5,5 |
687,5 |
157,20 |
115 |
110,4 |
7,65 |
3,18 |
61,00 |
96,20 |
1054,78 |
6 |
|
175 |
6,5 |
125 |
6 |
750,0 |
175,48 |
115 |
110,4 |
8,38 |
3,18 |
61,00 |
114,48 |
1054,78 |
Tabela 6 a = 0,78
Lp. |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
Rrt |
ΔP0 |
ΔPobc |
n |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
Ω |
W |
W |
Obr/min |
1 |
5 |
220 |
2,7 |
195 |
2 |
390,0 |
100,72 |
150 |
144,0 |
3,41 |
3,68 |
86,00 |
14,72 |
1375,80 |
2 |
|
225 |
3,2 |
195 |
2,5 |
487,5 |
107,88 |
150 |
144,0 |
4,13 |
3,50 |
86,00 |
21,88 |
1375,80 |
3 |
|
220 |
3,8 |
190 |
3 |
570,0 |
116,42 |
150 |
144,0 |
4,77 |
3,38 |
86,00 |
30,42 |
1375,80 |
4 |
|
220 |
4,5 |
180 |
4 |
720,0 |
138,00 |
150 |
144,0 |
5,96 |
3,25 |
86,00 |
52,00 |
1375,80 |
5 |
|
220 |
5,6 |
170 |
5 |
850,0 |
163,00 |
145 |
139,2 |
7,28 |
3,20 |
83,00 |
80,00 |
1329,94 |
6 |
|
215 |
6,1 |
165 |
5,5 |
907,5 |
179,20 |
145 |
139,2 |
7,81 |
3,18 |
83,00 |
96,20 |
1329,94 |
7 |
|
215 |
6,6 |
160 |
6 |
960,0 |
197,48 |
145 |
139,2 |
8,32 |
3,18 |
83,00 |
114,48 |
1329,94 |
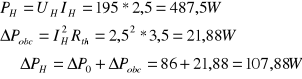
Przykładowe obliczenia (tabela 6 pomiar 2):
Rys. 2 Charakterystyki mechaniczne dla układu otwartego.
Rys. 3 Charakterystyki mechaniczne dla układu zamkniętego.
2.Pomiar charakterystyk regulacyjnych układu napędowego ω = f (a).
Tabela 7 i 8
Lp. |
US |
IM |
Uw |
ၷ |
a |
|
Lp. |
US |
IM |
Uw |
ၷ |
a |
|
V |
A |
V |
rad/s |
- |
|
|
V |
A |
V |
rad/s |
- |
1 |
0,0 |
3,07 |
75 |
72,0 |
0,05 |
|
1 |
0,0 |
4,8 |
45 |
43,2 |
0,05 |
2 |
0,5 |
|
80 |
76,8 |
0,13 |
|
2 |
0,5 |
|
55 |
52,8 |
0,13 |
3 |
1,0 |
|
85 |
81,6 |
0,2 |
|
3 |
1,0 |
|
65 |
62,4 |
0,2 |
4 |
1,5 |
|
95 |
91,2 |
0,26 |
|
4 |
1,5 |
|
70 |
67,2 |
0,26 |
5 |
2,0 |
|
100 |
96,0 |
0,34 |
|
5 |
2,0 |
|
83 |
79,7 |
0,34 |
6 |
2,5 |
|
115 |
110,4 |
0,4 |
|
6 |
2,5 |
|
95 |
91,2 |
0,4 |
7 |
3,0 |
|
125 |
120,0 |
0,48 |
|
7 |
3,0 |
|
100 |
96,0 |
0,48 |
8 |
3,5 |
|
140 |
134,4 |
0,56 |
|
8 |
3,5 |
|
115 |
110,4 |
0,56 |
9 |
4,0 |
|
145 |
139,2 |
0,63 |
|
9 |
4,0 |
|
125 |
120,0 |
0,63 |
10 |
4,5 |
|
150 |
144,0 |
0,72 |
|
10 |
4,5 |
|
140 |
134,4 |
0,72 |
11 |
5,0 |
|
150 |
144,0 |
0,78 |
|
11 |
5,0 |
|
150 |
144,0 |
0,78 |
Rys. 4 Charakterystyki regulacyjne
Wnioski:
. Pracę napędu w układzie otwartym badaliśmy przy różnych współczynnikach wypełnienia, możemy stwierdzić że w przypadku gdy „a” jest zbliżony do jedności to praca przebiega stabilnie i zmiany prędkości kątowej w wyniku zwiększania obciążenia są małe w porównaniu ze zmianami prędkości gdy współczynnik przyjmuje wartości niższe (ok. 0,5 i niższe). Praca w układzie automatycznej regulacji przebiega niestabilnie dla współczynnika „a=0,2” zaś dla reszty praca jest stabilna. W końcowych fazach wszystkich charakterystyk obserwowaliśmy zmniejszenie prędkości podczas wzrostu momentu.
Jak widać z charakterystyk regulacyjnych zwiększanie współczynnika wypełnienia pozwala na wzrost prędkości, w naszym przypadku prędkość była większa dla połowy prądu znamionowego silnika.
1
Wyszukiwarka
Podobne podstrony:
protokół pawkiec, Semestr 6, Sprawozdania, napędy elektryczne, cw 20
moooooooooooje 12, Semestr 6, Sprawozdania, napędy elektryczne, cw 12
Sprawozdanie trójfaz silnika, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
Sprawozdanie 1 Napędy elektryczne
Sprawozdanie napędy elektryczne
MASZYNY, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
Zadanie 1 warianty, AiR WIP, V semestr, NEMAR Napędy elektryczne maszyn i robotów
cw7ne, PWR ETK, Semestr VI, Napędy elektryczne Wykład
Naped hydrauliczny, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, Napędy elektryczne pneumatyczn
test50pytmaszyny, AiR WIP, V semestr, NEMAR Napędy elektryczne maszyn i robotów, nemar teori
Maszyny u napędy elektr 2012 korekta zagadnień, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektrycz
Napędy pneumatyczne, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, Napędy elektryczne pneumatycz
ćw. 6 (sprawozdanie), Semestr IV, Wspólne, Elektrotechnika III
cw 20, chemia w nauce i gospodarce Uł, semestr V, sprawozdania chemia fizyczna i analityczna uł, Che
sprawko olszyna, AGH-IMiR-AiR, IV semestr, Napędy elektryczne, Sprawozdania, Wyznaczanie sprawności
Sprawozdanie 051, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki
Sprawozdanie elektrotechnika ćw.4, Szkoła, Semestr 4, Elektrotechnika III, Ćw 4 u Dzika
więcej podobnych podstron