Dr hab. inż. Z. Kudźma do wykładu Sterowanie maszyn i urządzeń - MBM
1. Układy sterowania i regulacji prędkością odbiornika.
Sterowaniem nazywamy proces, w którym przez zmianę wielkości wejściowej (sterującej) wpływa się na wielkość wyjściową (sterowaną) zgodnie z określoną dla układu sterującego prawidłowością.
Układem regulacji nazywamy układ sterowania wyposażony w dodatkowy człon, umożliwiający mierzenie wielkości wyjściowej i porównanie jej z zadaną wielkością wejściową oraz wprowadzenie poprawki, w przypadku gdy występują między nimi różnice.
Prędkość robocza dowolnego typu odbiornika , silnika lub siłownika zależy od natężenia przepływu strumienia zasilającego . Sterowanie lub regulacja jest realizowana przez zmianę natężenia przepływu strumienia cieczy doprowadzonego do lub odprowadzonego z odbiornika , przy czym są dwie możliwości dokonywania tej zmiany :
pierwsza , nazywana sterowaniem lub regulacją dławieniową , polegającą na dławieniu strumienia dopływającego lub odpływającego z silnika bądź też strumienia równoległego do przepływającego przez silnik
druga , która nazywa się sterowaniem lub regulacją objętościową , polegającą na zmianie wydajności pompy lub chłonności silnika
1.1. Układy dławieniowe.
W układach dławieniowych stosuje się pompy o stałej wydajności natomiast zmianę prędkości odbiornika uzyskuje się przez odpowiednie dławienie strumienia oleju w określonej gałęzi układu hydraulicznego. Zmiana natężenia przepływu strumienia doprowadzonego do silnika dokonuje się kosztem zwiększonych strat mocy , związanych z celowo bezużytecznie odprowadzoną do zbiornika częścią generowanego strumienia.
1.1.1 Sterowanie dławieniowe szeregowe
W sterowaniu dławieniowym szeregowym zawór dławiący lub dwudrogowy regulator przepływu jest umieszczony na linii pompa - silnik - zbiornik. Zawór dławiący może znajdować się za równo na dopływie do silnika jak i na odpływie z silnika.
1.1.1.1 Układ z dławieniem na dopływie
W układzie tym układ napędowy z odbiornikiem dowolnego typu (silnik , siłownik) jest sterowany za pomocą nastawnego zaworu dławiącego umiejscowionego na dopływie do odbiornika.
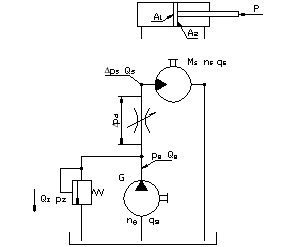
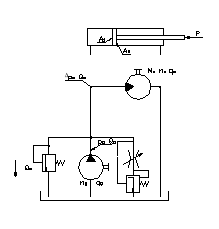
Rys. 1. Schemat układu sterowania dławieniowego szeregowego z dławieniem na dopływie
Pompa G o stałej wydajności tłoczy czynnik roboczy przez nastawny zawór dławiący do odbiornika. Zmiana prędkości odbiornika przy stałej jego chłonności właściwej oraz przy stałej wydajności generatora ( pompy ) Qg uzyskuje się przez odpowiednią nastawę spadku ciśnienia Δpd na zaworze dławiącym który wymusza określone natężenie przepływu Qz przez zawór przelewowy do zbiornika.
Zjawisko to można wyjaśnić za pomocą charakterystyk przepływowych elementów w układzie współrzędnych Q , p.
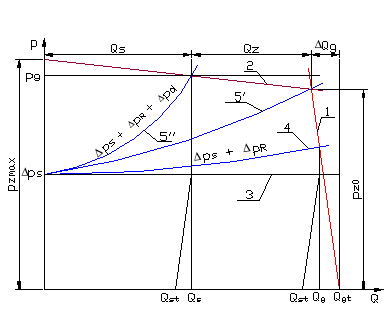
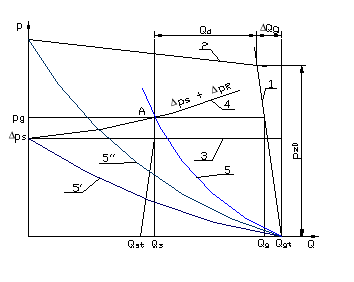
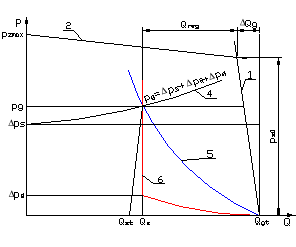
Wykres 1. Charakterystyki przepływowe układu ze sterowaniem dławieniowym szeregowym
Prosta 1 i 2 przedstawia odpowiednio zlinearyzowane charakterystyki generatora i zaworu przelewowego. Otwarcie zaworu przelewowego następuje przy ciśnieniu pz0 i osiąga wartość maksymalną przy ciśnieniu pz max , przy którym cały strumień wytworzony przez pompę wraca z powrotem do zbiornika.
Prosta 3 przedstawia efektywny spadek ciśnienia Δps niezbędny do pokonania obciążenia zewnętrznego w postaci momentu Ms ( silnik ) lub siły P ( siłownik ) . Jeśli obciążenie to nie zmienia się to spadek ciśnienia Δps jest stały.
Krzywa 4 przedstawia wypadkową charakterystykę przepływu Δps + ΔpR = f(Q) silnika i przewodów stanowiących szeregowy układ połączeń.
Punkt przecięcia się charakterystyki Δps + ΔpR = f(Q) (krzywa 4) z charakterystyką generatora (krzywa 1) wyznacza rzeczywistą wydajność generatora doprowadzoną do odbiornika
![]()
Prędkość obrotową silnika można obliczyć z zależności
![]()
Chłonność teoretyczna silnika Qst wyznacz punkt przecięcia się charakterystyki silnika 6 z osią odciętych.
Prędkość ruchu postępowo - zwrotnego tłoka można obliczyć z chłonności Qs = Qg ponieważ straty objętościowe siłownika są bardzo małe.
![]()
Jeśli ciśnienie zasilania będzie mniejsze od ciśnienia otwarcia zaworu przelewowego ( pg = Δps + ΔpR < pz0 ) tzn. charakterystyka 4 będzie leżała poniżej charakterystyki granicznej 5' ,to zawór przelewowy pozostaje zamknięty , a zmienność prędkości odbiornika będzie określona tylko sprawnościami objętościowymi generatora i silnika.
Dławieniowe sterowanie prędkością odbiornika będzie występować wówczas gdy pg > pz0 .W tym celu należy zamknąć zawór dławiący tak aby obciążenie generatora pg = Δps + ΔpR + Δpd >pz0 przecinało charakterystykę zaworu przelewowego 2 (krzywa 5'').
1.1.1.2 Układ z dławieniem na odpływie
W układzie tym układ napędowy z odbiornikiem dowolnego typu ( silnik , siłownik ) jest sterowany za pomocą nastawnego zaworu dławiącego umieszczonego na odpływie z odbiornika.
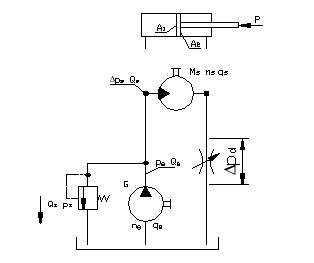
Rys. 2. Schemat układu dławieniowego szeregowego z dławieniem na odpływie
Pompa G o stałej wydajności tłoczy olej bezpośrednio do odbiornika i wprawia go w ruch. Prędkość odbiornika jest ograniczona zdolnością przepustową nastawnego zaworu dławiącego , usytuowanego na przewodzie odpływowym z odbiornika. Nadmiar wydajności pompy jest odprowadzany za pomocą zaworu przelewowego do zbiornika. Zawór ten stabilizuje ciśnienie panujące w całej gałęzi. Zmienne , zależne od obciążenia zewnętrznego jest ciśnienie między odbiornikiem a zaworem dławiącym.
Wypadkowe charakterystyki przepływowe , będące sumą zależności Δp = f(Q) wszystkich połączonych szeregowo elementów silnika, zaworu dławiącego i przewodów są identyczne jak w układzie z dławieniem na dopływie ponieważ wartość sumy nie zależy od kolejności składników. Pod względem strat mocy oraz sprawności oba układy są równoważne.
Powyższe stwierdzenie, że charakterystyki obu układów są równoważne nie oznacza, że w praktyce układy te są identyczne. Oba układy mają swoje zalety i wady.
Podstawową zaletą sterowania dławieniowego na wejściu do odbiornika jest mniejsze jego obciążenie, zależne od obciążenia zewnętrznego. Drugą zaletą jest mniejsza objętość cieczy poddanej działaniu ciśnienia. Podstawową wadą tego układu jest to, że ciśnienie po stronie tłocznej siłownika jest bliskie zeru. Przy skokowej zmianie wartości obciążenia zewnętrznego , tłok zostanie wprawiony w ruch drgający, co jest szkodliwe przy małych prędkościach jego ruchu. Kolejną wadą jest to ,że w niektórych układach odciążenie zewnętrzne może zmieniać kierunek oddziaływania na tłoczysko. Obciążenie zgodne z ruchem tłoka jest niebezpieczne gdyż w skutek zjawisk kawitacyjnych może spowodować oderwanie tłoka od lustra cieczy i niekontrolowany ruch wysuwowy tłoka. Dlatego w tych układach umieszcza się po stronie spływowej sterowany zawór zwrotny. Wady tej nie mają układy sterowane zaworem znajdującym się po stronie spływowej do zbiornika w której panuje ciśnienie wynikające z nastawy zaworu dławiącego. Tłok w siłowniku jest obciążony obustronnie i mniej wrażliwy na zmianę obciążenia zewnętrznego zarówno pod względem wartości, jak i kierunku działania.
1.1.2. Sterowanie dławieniowe równoległe
W sterowaniu dławieniowym równoległym zawór dławiący jest usytuowany na przewodzie przez który przepływa strumień równoległy do strumienia przepływającego przez odbiornik [2]
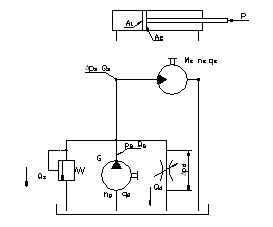
Rys. 3 Schemat układu dławieniowego równoległego
Strumień cieczy generowany przez pompę o stałej wydajności rozgałęzia się na strumień Qs zasilający odbiornik i na strumień Qd przepływający przez zawór dławiący z powrotem do zbiornika. Trzecie odgałęzienie z zaworem maksymalnym spełniającym rolę zaworu bezpieczeństwa w odróżnieniu od sterowania dławieniowego szeregowego jest normalnie nieczynne gdyż w układzie nie ma nadmiaru czynnika roboczego, który musi być odprowadzony do zbiornika. Zawór bezpieczeństwa zabezpiecza układ przed przeciążeniem. Otwiera się, gdy ciśnienie wzrośnie ponad dopuszczalną normę, osiągając wartość nastawy zaworu.
Przymykając zawór dławiący zmniejsza się natężenie przepływu przez niego, co powoduje wzrost natężenia przepływu w przewodzie dopływowym do odbiornika i wzrost prędkości tego odbiornika.
Zmianę prędkości odbiornika można wyjaśnić za pomocą charakterystyk przepływowych elementów w układzie współrzędnych Q , p .
Rys. charakterystyki
Wykres 2. Charakterystyki przepływowe układu ze sterowaniem dławieniowym równoległym
Proste 1 i 2 przedstawiają odpowiednio zlinearyzowane charakterystyki generatora i zaworu przelewowego. Proste te ograniczają pole pracy źródła zasilającego. Na te charakterystyki naniesiono charakterystyki obciążenia zewnętrznego silnika Δps ( prosta 3 ), która przedstawia efektywny spadek ciśnienia niezbędnego do pokonania obciążenia zewnętrznego w postaci momentu Ms lub siły [ ]. Jeżeli obciążenie to nie zmienia się to spadek ciśnienia Δps jest stały. Krzywa 4 przedstawia charakterystykę przepływową układu silnik - przewody. Natomiast krzywe 5, 5', 5'' przedstawiają charakterystyki przepływowe zaworu dławiącego dla różnych wartości pola powierzchni szczeliny dławiącej. Są one wyprowadzone z punktu o współrzędnych Qg = Qgt , p=0. Jest to uzasadnione tym, że przepływ przez równolegle z silnikiem usytuowany zawór dławiący jest ujemny w stosunku do strumienia zasilającego silnik. Co oznacza, że generowany przez pompę strumień cieczy wraca z powrotem do zbiornika i silnik nie obraca się. Silnik będzie mógł ruszyć dopiero gdy charakterystyka 5 zaworu dławiącego przetnie się z charakterystyką obciążenia Δps + ΔpR =f (Q) (krzywa 4), a więc wtedy gdy charakterystyka 5 będzie leżała ponad charakterystyką graniczną 5' . Punkt przecięcia się obu charakterystyk może być dowolnie położony w całym polu zasilania. Jego położenie jest uzależnione z jednej strony położeniem charakterystyki obciążenia względem osi Q i nastawą pola powierzchni szczeliny dławiącej zaworu. Punkt A , wyznaczający wartość ciśnienia w przewodzie tłocznym generatora, ustala bieżącą wartość chłonności rzeczywistej silnika Qs
![]()
Przy zamkniętym zaworze dławiącym odbiornik jest zasilany pełną wydajnością pompy, a zatem jego prędkość jest maksymalna. Obciążenie generatora oraz natężenie przepływu strumienia zasilającego silnik (Qg = Qs) wyznacza wówczas punkt przecięcia się charakterystyki obciążenia Δps + ΔpR =f (Q) z charakterystyką pompy.
3. Regulacja dławieniowa szeregowa
W rzeczywistych układach napędowych obciążenie Δps odbiornika często jest zmienne. Zmiana obciążenia zewnętrznego powoduje zmianę efektywnego spadku ciśnienia Δps .
W układach regulacji dławieniowej szeregowej zawór dławiący zastępuje się dwudrogowym regulatorem przepływu. Regulator w dużej mierze eliminuje nierównomierność prędkości wywołaną zmianami obciążenia oraz podnosi sprawność układu.
Działanie regulatora przepływu polega na tym, że utrzymuje on automatycznie stałe natężenie przepływu w gałęzi, na której jest ustawiony, niezależnie od zmian obciążenia odbiornika i wywołanych tym zmian ciśnienia w układzie [2].
Dwudrogowy regulator przepływu
Regulator dwudrogowy powstał w wyniku połączenia szeregowego zaworu dławiącego , od którego zależy wartość natężenia przepływu w danej gałęzi i z połączonego w odpowiedni sposób zaworu różnicowego. Zadaniem zaworu różnicowego jest utrzymywanie stałego spadku ciśnienia na zaworze dławiącym i przez to stałego niezależnego od obciążenia odbiornika natężenia przepływu przez zawór dławiący.
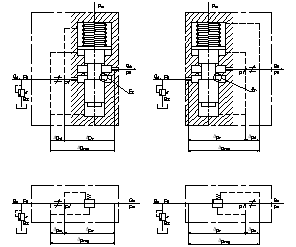
Rys. 4 .Schematy konstrukcyjne i symbole graficzne dwudrogowych regulatorów przepływu
Istnieje wiele możliwości rozwiązania schematycznego samych regulatorów przepływu. W praktyce realizowane są dwa rozwiązania wzajemnego usytuowania zaworu dławiącego i różnicowego. W pierwszym rozwiązaniu zawór dławiący znajduje się przed zaworem różnicowym natomiast w drugim rozwiązaniu jest usytuowany za nim.
W regulatorze dwudrogowym wzajemne usytuowanie obu zaworów nie ma wpływu na zasadę działania ponieważ są połączone szeregowo. Przy szeregowym łączeniu oporów ich suma nie zależy od kolejności składników.
Istnieje wiele możliwości umieszczenia dwudrogowego regulatora przepływu w układach regulacji dławieniowej szeregowej.
Regulator przepływu może znajdować się na dopływie do odbiornika zarówno, w wersji, w której zawór dławiący znajduje się przed zaworem różnicowym jak i w wersji za zaworem różnicowym, a także na odpływie z odbiornika także w dwóch rozwiązaniach wzajemnego usytuowania tych zaworów.
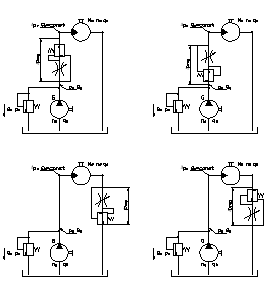
Rys. 5. Schematy układów regulacji dławieniowej szeregowej
Zasadę działania regulacji dławieniowej szeregowej można wyjaśnić za pomocą charakterystyk przepływowych.
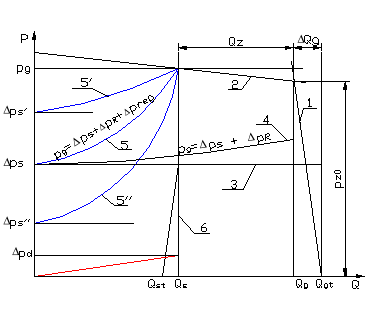
Wykres 3 Charakterystyki przepływowe układu z regulacją dławieniową szeregową
Regulator przepływu dostosowuje sumaryczne spadki ciśnienia Δpreg do zmiennego obciążenia Δps , w ten sposób, aby wypadkowa charakterystyka Δps + ΔpR + Δpreg = f(Q) (krzywa 5) przecinała charakterystykę zaworu przelewowego (krzywa 2) zawsze w tym samym punkcie. Punkt ten jest w miejscu przecięcia charakterystyki zaworu przelewowego z charakterystyką regulatora 6, dla odpowiedniej nastawy zaworu dławiącego.
Z zasady działania regulatora wynika, że spadek ciśnienia w zaworze dławiącym Δpd jest stały, a dostosowanie się całkowitego spadku ciśnienia w regulatorze do wartości obciążenia Δps dokonuje się przez zmianę spadku ciśnienia w zaworze różnicowym, stanowiącym drugi stopień kaskady dławiącej . Jeśli np. obciążenie silnika wzrośnie do wartości Δps', to musi zmaleć odpowiednio ciśnienie Δpreg (krzywa 5') w wyniku zwiększenia się pola powierzchni szczeliny dławiącej zaworu różnicowego. Przy spadku obciążenia do wartości Δps'' szczelina zaworu różnicowego będzie przymykana, przez co zwiększy się spadek Δpreg (krzywa 5'') tak aby był spełniony warunek pg ≈ pz = Δps + ΔpR + Δpreg = const.
Zakres działania regulatora jest od dołu ograniczony wartością spadku ciśnienia Δpd w otworze zaworu dławiącego, niezbędną do tego, aby zawór różnicowy mógł automatycznie dostosować wartość Δpr do bieżących warunków obciążenia silnika. Zmianę nastawy wartości Qs , a przez to prędkość silnika lub siłownika, uzyskuje się przez zmianę pola powierzchni otworu przepływowego w zaworze dławiącym. Jest to oczywiście możliwe tylko w przypadku regulatorów nastawnych.
W regulacji dławieniowej szeregowej pompa pracuje pod maksymalnym ciśnieniem, co wpływa ujemnie na sprawność układu, trwałość pompy i powoduje nagrzewanie się cieczy.
1.1.4 Regulacja dławieniowa równoległa
W regulacji dławieniowej równoległej można zastosować dwudrogowy regulator przepływu, który jest usytuowany w przewodzie przez który przepływa strumień równoległy do strumienia przepływającego przez odbiornik.
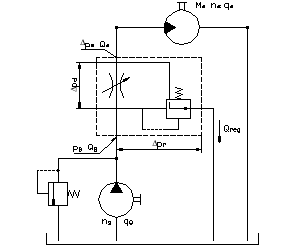
Rys. 6. Schemat układu regulacji dławieniowej równoległej z regulatorem dwudrogowym
W tym rozwiązaniu oprócz stałej prędkości odbiornika, niezależnej od obciążenia uzyskuje się możliwość sterowania w rozległym zakresie.
Pompa nie pracuje pod maksymalnym ciśnieniem lecz pod ciśnieniem wynikającym z aktualnego obciążenia. Niestety wadą tego układu jest zdolność do pokonywania obciążeń skierowanych zawsze przeciwnie do ruchu tłoka oraz to, że wpływ przecieków w pompie może być powodem znacznych spadków prędkości pod obciążeniem. Stabilizacja prędkości odbiornika będzie więc obarczona znacznym błędem.
Pod względem dokładności stabilizacji korzystniejszym rozwiązaniem jest wprowadzenie do układu między pompę a silnik regulator trójdrogowy.
Rys. 7. Schemat układu regulacji dławieniowej równoległej z regulatorem trójdrogowym
Regulator trójdrogowy
Regulator trójdrogowy składa się z zaworu dławiącego i zaworu różnicowego , które są połączone równolegle .
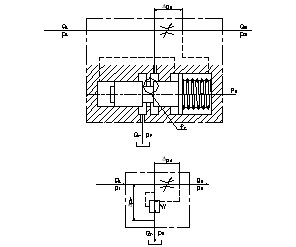
Rys. 8. Schemat konstrukcyjny i symbol graficzny trójdrogowego regulatora przepływu
Generowany przez pompę strumień cieczy Q1 zastaje w regulatorze podzielony na strumień Q2 dochodzący do odbiornika, oraz strumień Qr odprowadzany przez szczelinę zaworu różnicowego do zbiornika. Zawór różnicowy spełnia również rolę zaworu przelewowego.
Warunkiem działania regulatora jest spełnienie zależności Q1 > Q2 Qr = Q1 - Q2 > 0.
Jeśli Δpd będzie wartością stałą, to strumień użyteczny będzie miał stałe niezależne od obciążenia p2 natężenie przepływu Q2. Utrzymanie stałej wartości spadku ciśnienia na zaworze dławiącym Δpd = const. , zapewnia zawór różnicowy.
Przy małych obciążeniach straty całkowite regulatorów trójdrogowych są w porównaniu ze stratami regulatorów dwudrogowych bardzo małe. Regulatory trójdrogowe mogą pracować tylko na dopływie do odbiornika podczas gdy regulatory dwudrogowe można instalować zarówno po stronie dopływu jak i odpływu z odbiornika. [1] Jeśli regulator trójdrogowy ma pracować w linii o zmiennym kierunku przepływu to powinien być wyposażony w zawór zwrotny.
Wykres 4 Charakterystyki przepływowe układu z regulatorem trójdrogowym
Rola regulatora trójdrogowego w układach regulacji dławieniowej równoległej polega na automatycznym dostosowaniu otwarcia zaworu różnicowego w zależności od obciążenia pg tak aby charakterystyka przepływowa 5 przechodziła przez punkt przecięcia się charakterystyki obciążenia 4 z charakterystyką regulatora 6. Zakres działania regulatora jest ograniczony od dołu wartością spadku ciśnienia Δpd w zaworze dławiącym, niezbędną do tego, aby zawór różnicowy mógł dostosowywać Δpr do zmieniającego się obciążenia pg.
Zmiana wydajności pompy związana z jej stratami objętościowymi nie ma wpływu na natężenie Qs strumienia zasilającego silnik. Jego prędkość jest stabilizowana z większą dokładnością niż w układzie z regulatorem dwudrogowym w odgałęzieniu. Pompa także pracuje pod obciążeniem wynikającym z obecnego obciążenia zwiększonego o stały spadek ciśnienia na zaworze dławiącym.
Układy objętościowe.
W układzie hydrostatycznym objętościowym jedna z maszyn wchodzących w skład układu ( pompa , silnik ) , lub obie równocześnie , charakteryzuje się zmienną objętością roboczą. Sterowanie objętościowe charakteryzuje się wysoką sprawnością lecz jest dość kosztowne , ponieważ wymaga zastosowania drogiej maszyny hydraulicznej o zmiennej objętości roboczej i towarzyszących jej urządzeń pomocniczych.
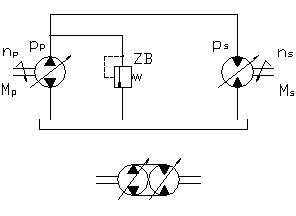
1.2.1 Sterowanie objętościowe z pompą o zmiennej wydajności.
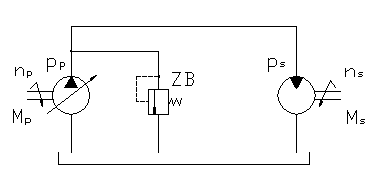
Rys. 9 Schemat układu objętościowego z pompą o zmiennej wydajności.
W tym układzie zawór bezpieczeństwa zabezpiecza układ przed przeciążeniem, ograniczając wysokość ciśnienia w przewodzie tłocznym pompy. Podczas normalnej pracy układu zawór ten jest zamknięty, a otwiera się tylko wówczas, gdy ciśnienie w przewodzie tłocznym pompy przekroczy dopuszczalną, ze względów wytrzymałościowych lub innych, wartość, na którą jest nastawiony. Gdy założymy, że układ pracuje bez strat energetycznych wówczas cały strumień wytworzony przez pompę dochodzi do silnika. Wydajność rzeczywista pompy Qp będzie iloczynem wydajności teoretycznej Qp th i parametru Xp , charakteryzującego nastawę organu sterującego wydajnością pompy (np. wartości mimośrodowości w pompie łopatkowej lub kąta nachylenia tarczy oporowej w pompie wielotłoczkowej osiowej). Parametr Xp - współczynnik wydajności pompy - przyjmuje wartości w granicach od 0 do 1.
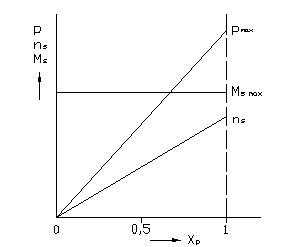
Wykres 5 Charakterystyka układu objętościowego z pompą o zmiennej wydajności
W układzie z pompą o zmiennej wydajności charakterystyczne jest utrzymanie maksymalnego momentu na wale silnika MSmax na stałym poziomie w pełnym zakresie wydajności pompy. Układ ten jest również nazywany układem stałego momentu.
Układ objętościowy z silnikiem o zmiennej chłonności
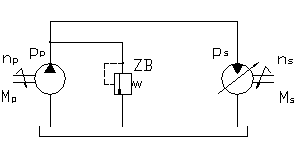
Rys. 10. Schemat układu objętościowego z silnikiem o zmiennej chłonności
Przy założeniu stałej prędkości obrotowej pompy jej wydajność jest stała i wynosi
![]()
Chłonność silnika Qs w rozważanym układzie jest funkcją teoretycznej objętości roboczej qsth , prędkości obrotowej ns i współczynnika chłonności silnika Xs , którego wartość zmienia się od 1 do 0.
![]()
Jeśli pompa jest napędzana ze stałą prędkością obrotową , to minimalną prędkość obrotową osiąga silnik przy maksymalnej objętości jego komór roboczych ( Xs = 1 ), a przy zmniejszeniu się chłonności silnika ( Xs → 0) ns rośnie do nieskończoności według zależności hiperbolicznej.
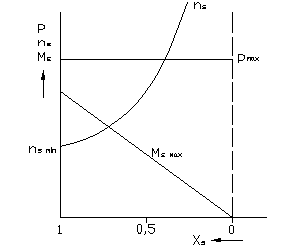
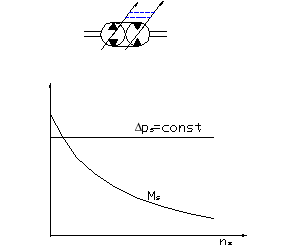
Wykres 6 Charakterystyka układu objętościowego z silnikiem o zmiennej chłonności
W układzie z silnikiem o zmiennej chłonności charakterystyczne jest utrzymanie stałej mocy , stąd układ bywa nazywany układem stałej mocy. Układ ten jest jednak niewygodny ze względu na ograniczony zakres prędkości obrotowych silnika. Dolna wartość ns jest ograniczona teoretyczną objętością roboczą silnika i zawsze jest większa od zera, górna zaś nie może rosnąć do nieskończoności , bo jest ograniczona właściwościami wytrzymałościowymi i dynamicznymi silnika.
Układ objętościowy o zmiennej objętości roboczej pompy i silnika.
W tego typu układach hydrostatycznych rozróżniamy dwie metody regulacji prędkości odbiornika.
z jednostkami nastawialnymi sekwencyjnie
z jednostkami nastawialnymi równocześnie
Sterowanie w taki sposób jest możliwe przy zastosowaniu mechanizmów dźwigniowych , krzywkowych lub elektronicznie.
Układ objętościowy z jednostkami nastawialnymi sekwencyjnie
Rys.11 Schemat i symbol graficzny układu z jednostkami nastawialnymi sekwencyjnie
\
Sterowanie odbywa się w następujący sposób, najpierw zmienia się nastawa generatora od wartości Xp=0 do wartości Xp=1 przy stałej wartości nastawy silnika Xs=1 a następnie reguluje się nastawę silnika od wartości Xs = 1 do wartości Xs = Xs min .
Charakterystyka tego układu jest zestawieniem charakterystyki układu z nastawnym generatorem i charakterystyki układu z nastawnym silnikiem.
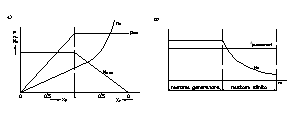
Wykres.7 Układ z obiema jednostkami nastawialnymi sekwencyjnie a) charakterystyka zewnętrzna b) charakterystyka regulacyjna
Do zalet tego układu hydrostatycznego można zaliczyć dobre własności rozruchowe wyrażające się tym, że moment rozruchowy na wałku wyjściowym ma maksymalną wartość przy małej jego prędkości obrotowej wyjściowej. Drugą zaletą układu jest znacznie większy, w porównaniu z układami o zmiennej objętości roboczej generatora lub silnika zakres zmienności przełożeń. Prędkość obrotowa wałka wyjściowego może się zmieniać w przedziale od ns=0 do ns max , określonej wartością momentu Ms min - niezbędną do pokonania oporów ruchu z nim związanych. W układzie tym również łatwo zmienia się kierunek obrotów wałka wyjściowego za pomocą zmiany znaku nastawy generatora Xp przy jednostronnie tylko zmiennej nastawie silnika Xs.
Układ objętościowy z jednostkami nastawialnymi równocześnie
Zmiany parametrów obu jednostek wyporowych można dokonywać równocześnie. Zmieniając nastawę wydajności generatora Xp dokonuje się również zmianę nastawy chłonności silnika Xs .Relacja, jaką spełniają oba sprzężone ze sobą parametry, może być dowolna i zależy tylko od konstrukcji mechanizmu nastawczego, realizującego określony program. Najczęściej spotykana współzależność obu parametrów ma postać Xp + Xs = 1. Z relacji tej wynika , że zwiększając parametr Xp dokonuje się równoczesnego zmniejszenia parametru Xs o tę samą wartość, o jaką wzrósł parametr Xp . Rozruch układu rozpoczyna się przy stanie określonym wartościami Xp = 0 i Xs = 1 , przy których wałek wyjściowy pozostaje w spoczynku. W miarę zwiększania wartości Xp i związanego z tym równoczesnego zmniejszania wartości Xs prędkość obrotowa wałka wyjściowego ns wzrasta.
Rys. 12. Symbol graficzny i charakterystyka regulacyjna układu z obiema jednostkami nastawialnymi równocześnie
Maksymalna wartość prędkości obrotowej ns max podobnie jak w układzie sterowanym sekwencyjnie, jest ograniczona wartością momentu Ms min niezbędną do pokonania oporów wynikających z obciążeń zewnętrznych wałka silnika. Układ równoczesnego sterowania jednostkami nie może pracować w pełnym zakresie zmian parametru Xp. Zakres ten jest ograniczony od góry wartością Xs max , przy której występuje minimalna wartość momentu Msmin na wałku wyjściowym i od dołu wartością Xp min niezbędną do wygenerowania odpowiedniego ciśnienia wynikającego z obciążenia zewnętrznego.
1
Wyszukiwarka
Podobne podstrony:
Pytania na drugi stopień MBM Sterowanie Maszyn i Urządzeń, Komp, Maszyny, Sterowanie maszyn i urządz
elementy hydrauliczne symbole, Komp, Maszyny, Sterowanie maszyn i urządzeń
napęd hydrostatyczny podstawy, Komp, Maszyny, Sterowanie maszyn i urządzeń
12 Podstawy automatyki Układy sterowania logicznego
Politechnika Białostocka 03 Układy sterowania umożliwiające zmianę parametrów ruchu tłoka
Układy sterowania silnikami elektrycznymi
KARTA OCENY RYZYKA Automatyk montujący szafy sterownicze do maszyn i urządzeń technicznych
Politechnika Białostocka 02 Podstawowe pneumatyczne układy sterowania ręcznego
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
209 układy sterowania silnikami JBZ2Z2BZ7CS6T5ZAF22SVX5BZP2W7C2D763IN7A
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Instrukcja 11 Uklady sterowania posredniego s
sprawko robotyka, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Elektro-Pneumatyczne układy sterowania, Technikum, Technik Mechatronik, PUM, Sprawozdania
Projekt3, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt góra, R
projekt1hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt g
więcej podobnych podstron