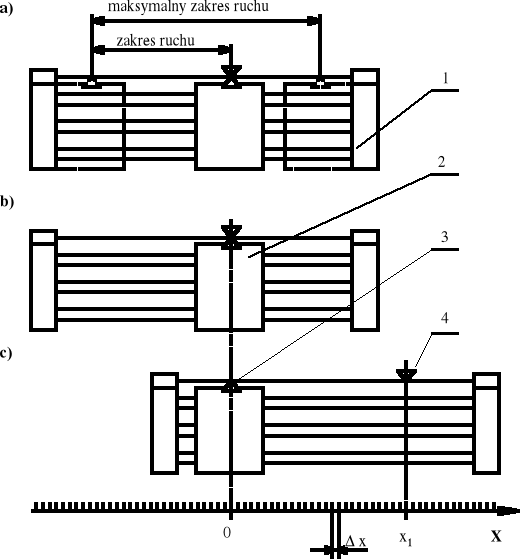
Rys.13. Określanie położenia ramienia manipulatora.
a) zakres ruchu ramienia,
b) ramię w położeniu bazowym,
c) ramię w położeniu o współrzędnej x1
1 - ramię manipulatora, 2 - wózek suportowy, 3 - punkt odniesienia dla czujnika (magnes trwały), 4 - czujnik położenia.
Moduł wejść/wyjść cyfrowych.
Moduł wejść/wyjść cyfrowych (rysunek 14.) umożliwia wprowadzenie do komputera (odczytanie) nie więcej niż 8 i wyprowadzenie z komputera (zapis) nie więcej niż 8 sygnałów logicznych (dwustanowych sygnałów napięciowych). Sygnały wyprowadzane są przez złącze wyjściowe (6) do odbiorników sygnałów, a wprowadzane przez złącze wejściowe (1) z nadajników sygnałów. 8 sygnałów wejściowych stanowi słowo wejściowe, a 8 sygnałów wyjściowych stanowi słowo wyjściowe modułu. Stan logiczny poszczególnych wejść i wyjść można obserwować na wskaźnikach diodowych (7), (8). Dołączanie przewodów sygnałowych do modułu jest ułatwione dzięki zastosowaniu puszki przyłączeniowej. Uporządkowanie sygnałów (numerowanych od 1 do 8) w polu wejściowym i wyjściowym puszki przyłączeniowej jest takie samo, jak uporządkowanie tych sygnałów (numerowanych od 0 do 7) w edytorze programu systemu CCS.
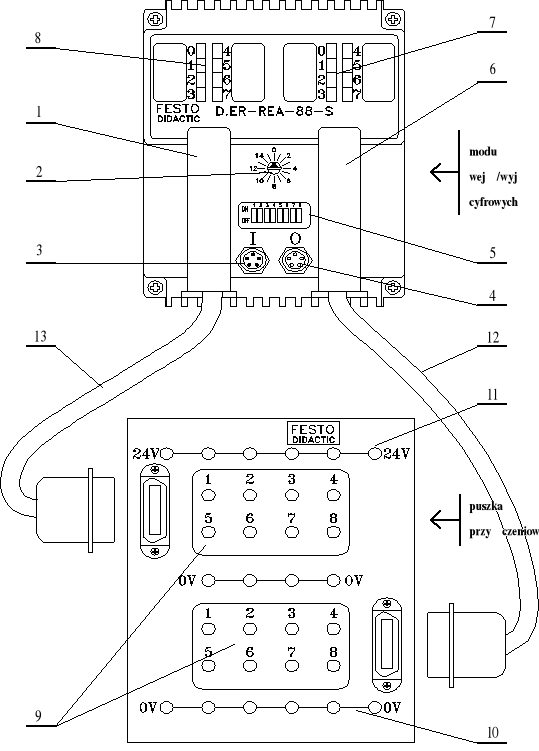
Rys.14. Moduł wejść/wyjść cyfrowych D.ER-REA-88-S z puszką przyłączeniową.
1 - gniazdo wejść logicznych (z włożoną wtyczką), 2 - przełącznik adresu, 3 - gniazdo wejściowe sygnału sterującego z komputera lub innego modułu, 4 - gniazdo wyjściowe sygnału sterującego na inny moduł, 5 - zespół przełączników konfiguracyjnych, 6 - gniazdo wyjść logicznych (z włożoną wtyczką), 7 - sygnalizacja optyczna stanu wyjść logicznych, 8 - sygnalizacja optyczna stanu wejść logicznych, 9 - pola wtykowe do przyłączania sygnałów wejściowych i wyjściowych, 10 - listwa do podłączenia masy zasilania, 11 - listwa do podłączenia 24V zasilania, 12 - kabel kabel doprowadzający sygnały wyjściowe modułu do puszki przyłączeniowej, 13 - kabel doprowadzający sygnały wejściowe z puszki przyłączeniowej do modułu.
Moduł sterowania silnikami skokowymi.
Moduł sterowania silnikami skokowymi jest wyspecjalizowanym modułem wejść/wyjść cyfrowych umożliwiającym sterowanie nie więcej niż dwoma silnikami skokowymi. Sposób dołączania silników skokowych i czujników położenia do modułu pokazuje rysunek 15.
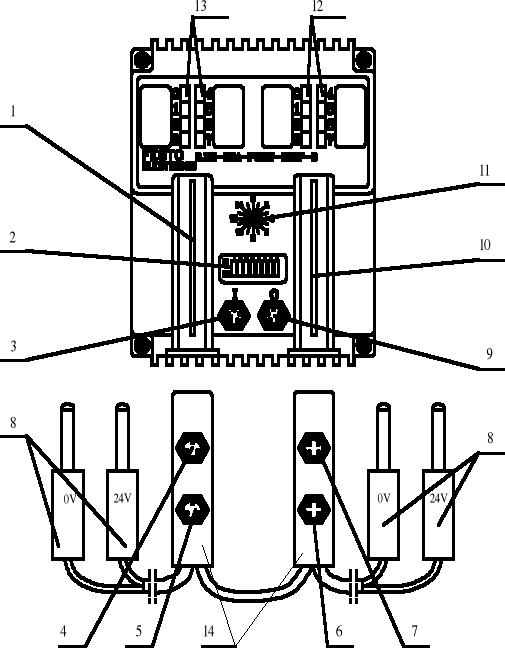
Rys.15. Moduł sterujący silnikami skokowymi D.ER.-REA-STEP-POSIT-2.
1 - gniazdo wejściowe (do podłączenia czujników punktu odniesienia), 2 - zespół przełączników konfiguracyjnych, 3 - gniazdo RS232 do podłączenia z komputerem lub poprzednim modułem, 4 - gniazdo do podłączenia czujnika punktu odniesienia na ramieniu nr 2, 5 - gniazdo do podłączenia czujnika punktu odniesienia na ramieniu nr 1, 6 - gniazdo do podłączenia silnika skokowego nr 1, 7 - gniazdo do podłączenia silnika skokowego nr 2, 8 - wtyczki zasilania (0V i +24V), 9 - gniazdo RS232 do połączenia z następnym modułem, 10 - gniazdo wyjściowe do podłączenia silników skokowych, 11 - przełącznik adresu, 12 - sygnalizacja optyczna stanu wyjść, 13 - sygnalizacja optyczna stanu wejść, 14 - wtyczki umieszczane w gnieździe wejściowym (1) i wyjściowym (10).
Sterowanie ruchem silnika skokowego przy pomocy tego modułu polega na ustawieniu przy pomocy odpowiednich rozkazów języka CCS prędkości początkowej, końcowej, przyspieszenia oraz położenia końcowego lub przemieszczenia, a następnie wydanie rozkazu inicjującego ruch. Nie są to więc operacje na poszczególnych sygnałach logicznych - sygnały bezpośredniego sterowania silnikiem skokowym (CLK, DIR) są generowane przez moduł na podstawie opisanych wyżej danych oraz aktualnego położenia ramienia.
Stan sterowania wzdłuż obu osi manipulatora można obserwować na wskaźnikach diodowych (tabele 6, 7).
Tabela 6.
Tabela stanów wskaźników świetlnych pokazujących stan wejść modułu sterowania silnikami skokowymi D.ER.-REA-STEP-POSIT-2.
oś 1 nr diody |
oś 2 nr diody |
stan diody |
stan sterownika |
0 |
4 |
0 1 |
ruch brak ruchu |
1 |
5 |
0 1 |
oś w położeniu odniesienia oś poza położeniem odniesienia |
2 |
6 |
0 1 |
nie używany
|
3 |
7 |
0 1 |
nie używany |
Tabela 7.
Tabela stanów wskaźników świetlnych pokazujących stan wyjść modułu sterowania silnikami skokowymi D.ER.-REA-STEP-POSIT-2.
oś 1 nr diody |
oś 2 nr diody |
stan diody |
stan sterownika |
0 |
4 |
0 1 |
sygnał taktujący CLK |
1 |
5 |
0 1 |
ruch w kierunku dodatnim ruch w kierunku ujemnym |
2 |
6 |
0 1 |
nie używany |
3 |
7 |
0 1 |
ruch brak ruchu |
Łączenie i konfigurowanie modułów.
W procesie sterowania opisanym wcześniej manipulatorem wykorzystywane są dwa różne moduły: moduł wejść/wyjść cyfrowych D.ER-REA-88-S oraz moduł sterowania silnikami skokowymi D.ER-REA-STEP-POSIT-2. W celu sterowania bardziej rozbudowanym układem wykonawczym (np. kilkoma współpracującymi ze sobą manipulatorami), można z jednym urządzeniem sterującym (komputerem) połączyć jednocześnie do 16 modułów. Sposób łączenia wielu modułów z jednym komputerem przedstawia rysunek 17.
Pierwszy z modułów ma gniazdo Input (3 na rysunkach 14, 15) połączone z komputerem (za pośrednictwem interfejsu prądowego RS232). Każdy następny dołączany moduł ma gniazdo Input połączone z gniazdem Output poprzedniego. W gnieżdzie Output ostatniego modułu jest umieszczony terminator (5) - wtyczka przystosowana do zakończenia łańcucha połączeń. Kolejność łączenia modułów jest dowolna.
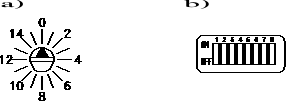
Rys.16. Elementy ustalania konfiguracji modułu.
a) przełącznik adresów, b) zespół przełączników konfiguracyjnych.
Aby uniknąć niejednoznaczności w czasie przesyłania rozkazów do modułów konieczne jest określenie, dla którego modułu przeznaczony jest rozkaz. Z tego powodu każdy moduł wyposażony jest w przełącznik adresu (rys.16a), a ustawiony na nim adres zawarty jest również w każdym rozkazie sterującym przeznaczonym dla tego modułu.
Adres jest liczbą z zakresu od 0 do 15. Oczywiście nie powinno być dwóch lub więcej modułów o tym samym adresie.
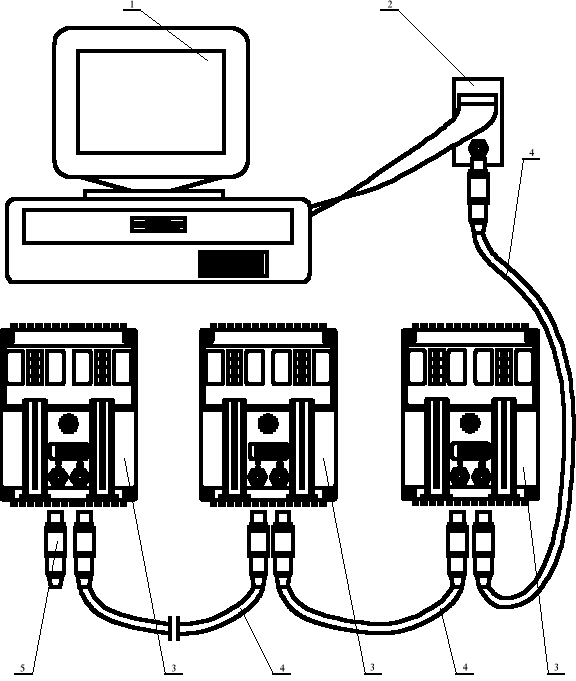
Rys.17. Łączenie modułów z komputerem.
1 - komputer, 2 - przetwornik napięciowego sygnału transmisji szeregowej na sygnał prądowy, 3 - moduły, 4 - kable łączące, 5 - terminator.
Poprawna praca układu wymaga również ustawienia następujących parametrów transmisji szeregowej:
- szybkość transmisji,
- sposób sprawdzania parzystości w bajtach,
- włączenie lub wyłączenie echa.
Ustawienie tych parametrów powinno być jednakowe w każdym module i takie samo, jak w systemie CCS (sposób ustawiania parametrów transmisji w systemie CCS opisany jest na str. Błąd! Nie określono zakładki.)
Parametry te są ustawiane przy pomocy zespołu przełączników konfiguracyjnych (rys.16b.) umieszczonych na płycie czołowej w każdym module. (rys. 14, 15) .
Jednostką szybkości transmisji jest bod - ilość bitów przesyłanych w ciągu sekundy. Sposób ustalenia szybkości transmisji przy pomocy zespołu przełączników konfiguracyjnych przedstawia tabela 8.
Tabela 8.
Ustawianie szybkości transmisji szeregowej przy pomocy przełączników konfiguracyjnych.
stan przełącznika nr 1 |
stan przełącznika nr 2 |
szybkość transmisji [bit/s] |
0 |
1 |
300 |
1 |
0 |
1200 |
0 |
0 |
2400 |
Sprawdzanie parzystości jest metodą wykrywania błędów transmisji. Każdy przesyłany bajt może zawierać (w zapisie dwójkowym) parzystą lub nieparzystą ilość jedynek. Cecha ta jest sprawdzana przed wysłaniem każdego bajtu i w zależności od wyniku sprawdzenia ustawiany jest bit kontrolny w wysyłanym bajcie. Urządzenie odbierające po odebraniu każdego bajtu dokonuje powtórnego sprawdzenia ilości jedynek i wynik porównuje ze stanem bitu kontrolnego w odebranym bajcie. W przypadku niezgodności sygnalizowany jest błąd transmisji.
Stan "1" bitu kontrolnego może oznaczać, w zależności od skonfigurowania układu, parzystą lub nieparzystą ilość jedynek, albo też może być niezależny od parzystości. Określanie sposobu sprawdzania parzystości przy pomocy zespołu przełączników konfiguracyjnych przedstawia tabela 9.
Tabela 9.
Ustawianie sposobu sprawdzania parzystości przy pomocy przełączników konfiguracyjnych.
stan przełącznika nr 3 |
stan przełącznika nr 4 |
sposób sprawdzania parzystości |
odpowiednik w menu systemu CCS |
0 |
1 |
stan "1" bitu kontrolnego wskazuje parzystą ilość jedynek w bajcie |
EVEN |
1 |
0 |
stan "1" bitu kontrolnego wskazuje nieparzystą ilość jedynek w bajcie |
ODD |
0 |
0 |
bit kontrolny ma stałą wartość "1" |
MARK |
Echo jest również metodą wykrywania błędów transmisji. Polega na zwrotnej transmisji każdego przesłanego bajtu w celu porównania go z oryginałem. Sposób włączania echa przy pomocy zespołu przełączników konfiguracyjnych przedstawia tabela 10.
Tabela 10.
Włączanie echa przy pomocy zespołu przełączników konfiguracyjnych.
stan przełącznika nr 5 |
stan przełącznika nr 6 |
stan opcji echo |
odpowiednik w menu systemu CCS |
0 |
1 |
echo włączone |
ECHO ON |
1 |
0 |
echo wyłączone |
ECHO OFF |
Przełączniki o numerach 7 i 8 nie są wykorzystywane.
strona D.
strona 3.
strona 1.
Wyszukiwarka
Podobne podstrony:
man r2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Mani
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
Projekt pkm2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa
Konstruowanie katalogowe manipulatorów, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty,
pkm, Automatyka i Robotyka, Semestr 5, PKM, projekty
pstan, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Manip
Manipulator, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty
Manipulator 3, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty
Pytania z PKM, Automatyka i Robotyka, Semestr 5, PKM, pytania
POLITECHNIKA ŚLĄSKA W GLIWICACH fffffff, Automatyka i Robotyka, Semestr IV, Podstawy Konstrukcji mas
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
Analiza cyklogramu szeregowego, Automatyka i Robotyka, Semestr 2, Robotyzacja, projekt, projekt 2
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
więcej podobnych podstron