WYKŁAD 14
ZŁOŻONE UKŁADY REGULACJI
Najprostszą postać układu regulacji z jedną zmienną regulowaną przedstawiono na rys.9.1. Efektywność tego układu zależy od właściwości dynamicznych obiektu i od zastosowanego algorytmu pracy regulatora. Ogólnie można powiedzieć, że jeżeli wymagania dotyczące jakości działania układu regulacji można spełnić używając jednego regulatora ( np. PI, PID, krokowego ), to struktura z rys.9.1 jest dobra i nie trzeba jej komplikować.
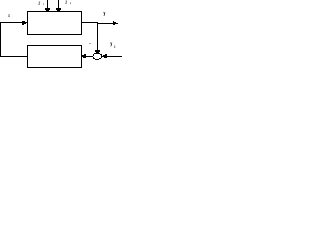
Rys 9.1. Jednoobwodowy układ regulacji.
Jeżeli obiekt regulacji jest obiektem z wyrównaniem, to ważnym parametrem określającym jego podatność na regulację jest stosunek To/Tz (To-zastępczy czas opóźnienia , Tz- zastępcza stała czasowa).
Już w przypadku obiektów będących członami inercyjnymi czwartego rządu To/Tz=0,319 stosowanie nawet najbardziej efektywnie działającego regulatora PID daje nie najlepsze wskaźniki jakości procesu przejściowego. W przypadku obiektów o złej dynamice efekty regulacji można polepszyć dzięki wprowadzeniu złożonych, tzn. wieloobwodowych układów regulacji. Najbardziej rozpowszechnione są układy regulacji kaskadowej i układy kombinowane ( zamknięto-otwarte ). Złożone układy regulacji często bada się za pomocą techniki modelowania analogowego lub cyfrowego.
9.1. Układy regulacji kaskadowej
Istotą regulacji kaskadowej jest podział obiektu regulacji na dwie części G1(s) i G1(s) tak, aby na każdą część obiektu działały odrębne zakłócenia Z*1 i Z*2 (rys.9.2).
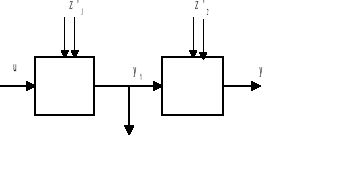
Rys.9.2. Podział obiektu na części G1 i G2.
Zakłócenia Z*1 działają na część G1, a zakłócenia Z*2 na część G2 obiektu (odpowiadające im, addytywne z wyjściami y i y1 obiektów G2 i G1, zakłócenia ekwiwalentne oznaczono Z1 i Z2 - patrz rys 9.3).
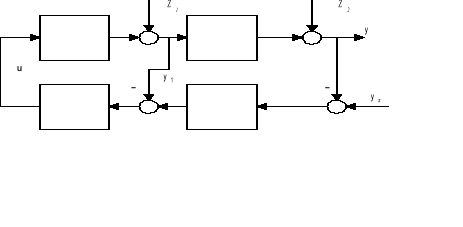
Rys.9.3. Kaskadowy układ regulacji
Zastosowanie układu regulacji kaskadowej jest uzasadnione tylko wtedy, gdy jest możliwy pomiar wielkości pomocniczej y1 zależnej od zakłóceń działających na część G1 obiektu. W układzie regulacji kaskadowej obie części obiektu obejmuje się układami regulacji (rys.9.3). W układzie pomocniczym wielkością regulowaną jest sygnał y1, a sygnał wyjściowy z regulatora głównego R1 spełnia rolę wartości zadanej dla regulatora pomocniczego R2. Dzięki zastosowaniu pomocniczego układu regulacji, pojawienie się zakłóceń Z1 powoduje wytworzenie przez regulator R1 sygnału kompensującego u, zanim nastąpi istotna zmiana wartości wielkości regulowanej y. Regulator pomocniczy R2 jest zwykle regulatorem typu P. Charakteryzuje się on szybką reakcją na zakłócenia, a występowanie odchyłki statycznej pomocniczej wielkości regulowanej jest na ogół dopuszczalne. Jeżeli niedopuszczalny jest uchyb statyczny zasadniczej wielkości regulowanej y, to regulator główny R1 powinien być regulatorem typu PI lub PID. Schemat kaskadowego układu regulacji z rys.9.3 można łatwo przekształcić do postaci pokazanej na rys.9.4. Z rysunku 9.4 wynika, że regulator główny R1(s) oddziałuje na obiekt zastępczy o transmitancji:
![]()
(9.1)
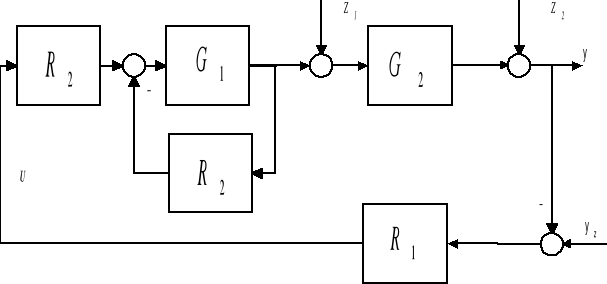
Rys.9.4. Przekształcony schemat blokowy kaskadowego układ regulacji
Właściwości dynamiczne obiektu zastępczego (9.1) są lepsze niż właściwości dynamiczne rzeczywistego układu regulacji o transmitancji G(s)= G1(s) G2(s). Jeżeli na przykład podział obiektu został tak dokonany, że część G1(s) jest członem inercyjnym pierwszego rzędu o transmitancji G1(s)=k1/(T1 s+1), a regulator R2 jest typu P o wzmocnieniu równym kp , to wzór (9.1) przyjmie postać:
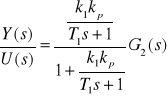
(9.2)
Po przekształceniach:
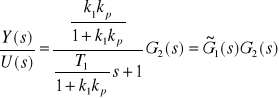
(9.3)
W obiekcie zastępczym część ![]()
![]()
jest również członem inercyjnym, lecz o wyraźnie mniejszej stałej czasowej niż część ![]()
obiektu rzeczywistego.
![]()

![]()
Jeżeli ![]()
>>1, to
Ze wzorów (9.4) wynika, że jeżeli wzmocnienie kp regulatora pomocniczego R2 jest dostatecznie duże, to o dynamice obiektu zastępczego decyduje część G2 obiektu rzeczywistego. Rząd inercji obiektu zastępczego jest więc niższy od rzędu inercji obiektu rzeczywistego, a tym samym stosunek To/Tz jest mniejszy. Poprawę właściwości dynamicznych obiektu zastępczego w porównaniu z obiektem rzeczywistym obserwuje się również wtedy, gdy właściwości dynamiczne części G1 obiektu są gorsze niż w rozpatrzonym przykładzie.
Efektem regulacji kaskadowej jest także linearyzacja charakterystyki statycznej obiektu.
W układach kaskadowych ważny jest dobór nastaw regulatorów, który przebiega w dwóch etapach. Najpierw należy dobrać nastawy regulatora pomocniczego R2 (jeżeli jest to regulator typu P, to dobór nastaw sprowadza się do wyznaczenia współczynnika wzmocnienia) jak dla jednoobwodowego układu regulacji. Następnie, zakładając że regulator główny R1 jest dołączony do zmodyfikowanego obiektu o transmitancji danej wzorem (9.1), należy dobrać jego nastawy, stosując którąś ze znanych metod, np. metodę Zieglera-Nicholsa.
9.2. Układy kombinowane ( zamknięto-otwarte )
Warunkiem koniecznym zastosowania układu kombinowanego jest wyodrębnienie mierzalnego sygnału zakłócającego z1 wpływającego w znany sposób na wartość wielkości regulowanej y. W układzie tym na wejściu do regulatora od odchyłki regulacji jest odejmowany przetworzony sygnał wymuszenia zakłócającego (rys.9.5). Przetworzenie sygnału z1 na z`1 następuje w członie sprzęgającym o transmitancji GS(s). Pożądana transmitancja członu sprzęgającego wynika z przyrównania do zera transmitancji zakłóceniowej kombinowanego układu regulacji Y(s)/Z1(s).Transmitancja zakłóceniowa może być łatwo wyznaczona po przekształceniu schematu blokowego z rys.9.5 do postaci przedstawionej na rys.9.6:
(9.5)
Rys.9.5. Schemat kombinowanego układu regulacji
Rys.9.6. Przekształcony schemat kombinowanego układ regulacji
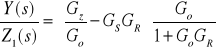
Po prostych przekształceniach
![]()
(9.6)
Z przyrównania do zera równania (9.6) wynika poszukiwana transmitancja idealnego członu sprzęgającego:
![]()
(9.7)
Transmitancja członu sprzęgającego zależy od właściwości obiektu regulacji i transmitancji wybranego regulatora. Jeżeli ![]()
![]()
(przypadek często spotykany w praktyce), to transmitancja członu sprzęgającego zależy jedynie od własności regulatora:
![]()
(9.8)
Jeżeli np. regulator jest typu PI 
oraz ![]()
, to
(9.9)
a po prostych przekształceniach:
![]()
(9.10)
gdzie:
kp - współczynnik wzmocnienia regulatora PI
Ti - czas zdwojenia regulatora PI
W tym przypadku człon sprzęgający jest członem różniczkującym z inercyjnością pierwszego rzędu. Przeszkodami w praktycznym zastosowaniu układów kombinowanych są trudności w realizacji członów sprzęgających ( zwykle o charakterystykach członów różniczkujących) oraz konieczność montowania czujników do pomiaru wielkości zakłócających.
9.3. Przykłady złożonych układów regulacji
Procesem, w którym powszechnie stosuje się złożone układy regulacji jest regulacja temperatury pary świeżej w kotle energetycznym. Wymaganą temperaturę pary uzyskuje się w wyniku przemian, zachodzących w przegrzewaczu. Przegrzewacz jest wymiennikiem ciepła, w którym następuje przekazywanie ciepła od spalin do pary. Pod względem dynamicznym przegrzewacz jest obiektem z wyrównaniem o
wysokim rzędzie inercji -zastępczy czas opóźnienia To=30-80,s, zastępcza stała czasowa Tz=100-200,s . Regulację temperatury pary powszechnie przeprowadza się przez wtrysk do pary wody na wejściu do przegrzewacza . Wymuszeniem regulacyjnym jest natężenie przepływu wody wtryskowej mw .Schemat przegrzewacza z wtryskiem przedstawiono na rys.9.8. Ze względu na wysokie wymagania dotyczące
jakości regulacji temperatury pary świeżej i złe właściwości dynamiczne obiektu regulacji stosowanie jednoobwodowych układów regulacji (rys.9.1) nie daje zadowalających wyników.
Rys.9.7. Schemat obiektu - przegrzewacza pary
.
Ważniejszymi zakłóceniami działającymi na temperaturę ϑ2 są: Z1-zmiany temperatury pary Δϑo na wejściu do przegrzewacza, oraz zmiany strumienia pary Δmp przepływającej przez przegrzewacz; Z2 - zmiany strumienia ciepła doprowadzanego do podgrzewacza ( wynikające ze zmian wartości opałowej paliwa, współczynnika nadmiaru powietrza itd. ).
Zakłócenia Z1- działają na temperaturę pary jeszcze przed wejściem do wymiennika ciepła podgrzewacza. Pomiar temperatury pary pomiędzy wtryskiem i wymiennikiem ciepła jest łatwy technicznie, możliwy jest więc podział obiektu na części G1 i G2. Również zakłócenia Z1 są mierzalne. Spełnione są więc warunki zastosowania złożonych układów regulacji temperatury pary świeżej.
9.4. Kaskadowy układ regulacji temperatury pary
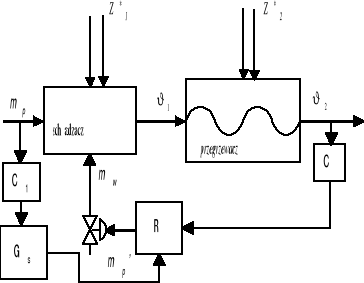
Z obiektu został wyprowadzony sygnał pomocniczej wielkości regulowanej - temperatury pary bezpośrednio za wtryskiem - ϑ1 .Miejsce pomiaru temperatury ϑ1 dzieli obiekt regulacji na dwa człony o transmitancjach - G1 i G2 rys.9.8. Układ regulacji składa się z dwóch obwodów: głównego i pomocniczego.
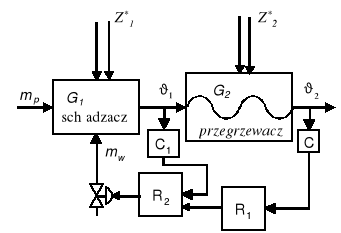
Rys. 9.8. Schemat automatyzacji dla kaskadowego układu regulacji temperatury pary
Obwód główny składa się z przegrzewacza , czujnika temperatury C, regulatora głównego R1 , regulatora pomocniczego R2 i zaworu sterującego dopływem wody do schładzacza wtryskowego. Obwód pomocniczy stanowią: schładzacz wtryskowy , czujnik temperatury C1, regulator pomocniczy R2 i zawór . Działanie zakłóceń Z1 jest w znacznej mierze kompensowane już w pomocniczym układzie regulacji. Zakłócenia Z2 nie powodują zmian sygnału pomocniczego ϑ1 , nie są więc kompensowane przez obwód pomocniczy, a ich pojawienie się jest powodem zadziałania jedynie regulatora głównego R1.
Regulację temperatury pary świeżej przeprowadza się nieraz w tzw. układach z pomocniczą wielkością mierzoną (rys.9.9).
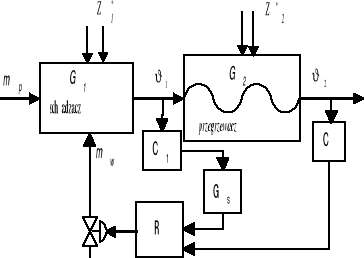
Rys.9.9. Schemat automatyzacji dla układu regulacji temperatury pary z pomocniczą wielkością mierzoną
Pomocniczą wielkością mierzoną (regulowaną) jest tu temperatura pary za wtryskiem ϑ1. Sygnał jest wprowadzany do regulatora przez człon sprzęgający o transmitancji GS(s). Schemat blokowy układu regulacji pokazano na rys.9.10a. Po prostych przekształceniach układ regulacji z pomocniczą wielkością regulowaną można sprowadzić do zwykłego układu kaskadowego (rys.9.10b).
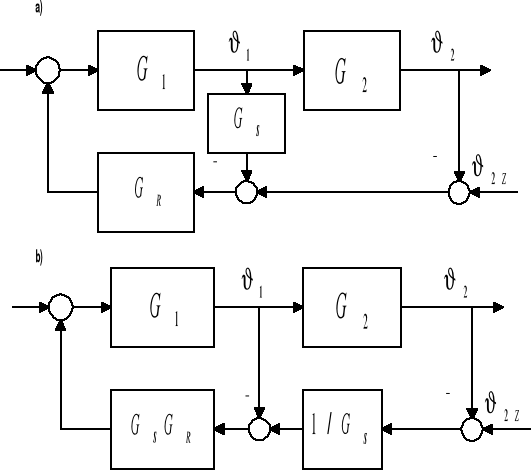
Rys.9.10. Schemat strukturalny układu regulacji z pomocniczą
wielkością regulowaną: a)-pierwotny b)- przekształcony
9.5. Kombinowany układ regulacji temperatury pary
Na rysunku 9.11 przedstawiono przykładowy schemat kombinowanego układu regulacji temperatury pary świeżej. Mierzonymi zakłóceniami są zmiany natężenia przepływu pary mp . Od sygnału wielkości regulowanej - temperatury pary ϑ2 jest odejmowany sygnał m'p będący odpowiednio przetworzonym sygnałem mp. Przetworzenie sygnału mp na m'p następuje w członie sprzęgającym o transmitancji GS(s). Rzeczywiste układy regulacji temperatury pary projektuje się jako układy kaskadowe z doprowadzonymi do regulatorów odpowiednio przetworzonymi sygnałami pochodzącymi od zakłóceń (np. zmian natężenia przepływu pary, zmian mocy bloku itp.).
Rys.9.11. Schemat automatyzacji kombinowanego układu regulacji temperatury pary
![]()


Wyszukiwarka
Podobne podstrony:
podyplom1, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, Spr
pstan02, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, Spraw
PKM, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAWOZDA
Dźwiękowe uderzenie, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od
tabela, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAWO
Model potęgowy, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka
NIEMIEC 2, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPR
GOTOWER, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAW
TISP 10, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAW
Symbole, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAW
Woda po Polsku, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka
NIEMIEC, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAW
LKIPSKI, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAW
Moment bezwładności, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od
lipski 2, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRA
Układ Fe-C, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SP
TISP 5, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAWO
L-KLEJ~1, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRA
PROJEKT Z SILNIKÓW I, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od
więcej podobnych podstron