S5006944 resize
30
jednej / badanych przwierzchiu ustawia mc kątownik, na drugiej natomiast czufnk / podstawą KnAcówŁi czujnika opiera się o wolny koniec kątownika W czasie pomiarów podstawę wra/ z czujnikiem przesuwa się w kierunku równoległym do wolnego końca kątownika Błąd mcprotiopadioici stanowi różnicę wskazań czujnika na okredoną długości pomiarowej Pomiar nieprostopadluaci w lulku punktach wzdłuz krawędzi przecięcia obu powierzchni pozwoli na określenie wichrowatnści badanych powierzchni
d> Sprawdzanie prostopadłości dwóch powierzchni przy użyciu poziomnicy (rys I 30)
Używając poziommcy ramowej mierzy się najpierw odchylenia powierzchni I od pionowej na określonej długości I, Następnie mierzy się odchylenia powierzchni 2 od poziomu w takiej samej odległości I, Różnica wskazanych odchyłek, z uwzględnieniem ich znaku, daje wartość błędu nieprostopadlości powierzchni 112
c) Sprawdzanie prostopadłości powierzchni do kierunku przesuwu Rys | J | przedstawia pomiar prostopadłości stołu do pionowego przesuwu wspornika. Na stole ustawia się kątownik Do wolnego końca kątownika przystawiona jest końcówka czujnika. Błąd nieprostopadłości równy jest różnicy wskazań czujnika na określonej długości pomiarowej.



Rys.Ul. Sprawdzanie prostopadłości powierzchni do kierunku przesuwu
i .1.9.4. Sprawdzanie nżfjfdMgO położenia osi i płaszczyzny
a) Sprawdzanie równoległości nu do powierzchni (rys I 32)
11zpień I mocowany w gnieźdae wrzeciona reprezentuje oś wrzeciona Czujnik mocowany W podtrzymce płaskie) przesuwany jest po badanej powierzchni 2 w kierunku tworzącej trzpienia Przed pomiarem trzpień kontrolny należy tak ustawić, aby bicie mierzone w kierunku krawędzi pomiarowe) stanowiło wartość średnią r. bicia maksymalnego i minimalnego
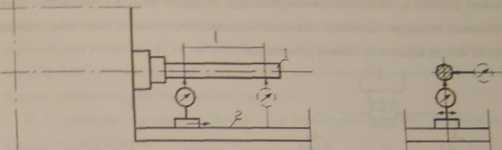



Rys. 1.32. Sprawdzanie równoległości osi do powierzchni
Błąd nierównoległości on I do powierzchni 2 stanowi różnicę wskazań czujnika na określonej długości pomiarowej I.
b) Sprawdzanie równoległości prowadnic do przesuwu su portu (rys. 1.33) t Podstawę z czujnikiem ustawia się na płycie suportu. Końcówka czujnika dotyka sprawdzanej prowadnicy. Przesuwając su port wzdłuż prowadnic odczytuje się wskazania czujnika co pewien określony odcinek I.
Błąd nierównoległości prowadnicy do przesuwu podawany jest w stosunku do określonej długości pomiarowej, np. 0,01 mm/1000 mm.
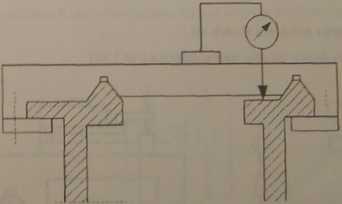
Kyi.1.33. Sprawdzanie równoległości prowadnic do przesuwu suportu
c) Sprawdzanie prostopadłości osi do powierzchni (rys. 1.34)
Ramię z czujnikiem mocuje się do wrzeciona, a końcówkę czujnika ustawia się równolegle do osi obrotu, tzn. prostopadle do badanej powierzchni. W czasie obrotu wrzeciona końcówka czujnika zatacza okrąg o promieniu równym odległości końcówki od osi obrotu Pomiar tym
Wyszukiwarka
Podobne podstrony:
S5006947 resize 36 Czujnik z podstawą ustawia się na płycie suportu, natomiast w kłach wrzeciona i k
30 2 Praca wykonana przez gaz jest sumą pracy podniesienia masy mc ciężaru na wysokość AH oraz pracy
S5006933 resize 8 >) określić sposób wykonania sprawozdania z ćwiczenia. 4) poszerzyć wiadomości
S5006934 resize 10 Metoda bezpośredniego sprawdzania geometrycznego obrabiarki - powszechnie dzisiaj
S5006937 resize 16 - odchyłki jednostronne, np.: + 0,02 mm; - 0,02 mm, mogące wyst
S5006942 resize 26 Rys.1.22. Użycie prowadnic wewnętrznych zamiast rynien do pomiaru prostoliniowoic
S5006943 resize 28 g) Pomiar za pomocą teleskopu i autokolimatora (rys. 1.26) Kolimator składa się z
S5006946 resize 34 W czasie pomiaru przesuwa się podstawę czujnika wzdłuz sprawdzanej osi. Blad niep
więcej podobnych podstron