0000023 3
34 Biomechanika kliniczna
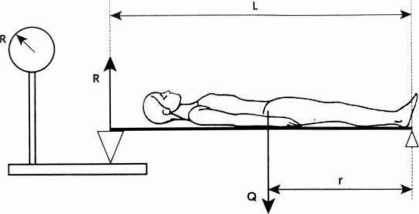
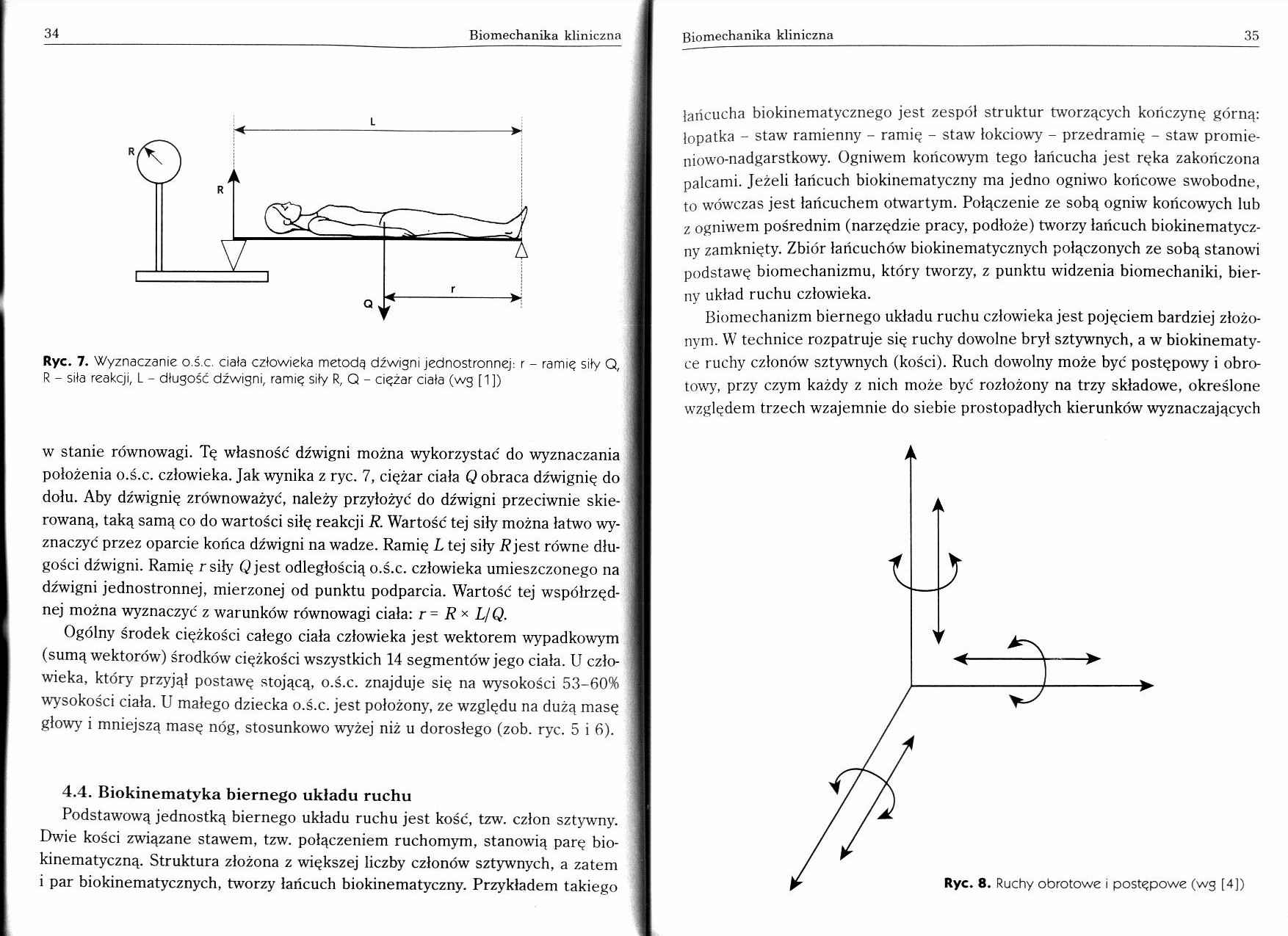
Ryc. 7. Wyznaczanie o.ś.c. ciała człowieka metodą dźwigni jednostronnej: r - ramię siły Q, R - siła reakcji, L - długość dźwigni, ramię siły R, Q - ciężar ciała (wg [1]) w stanie równowagi. Tę własność dźwigni można wykorzystać do wyznaczania położenia o.ś.c. człowieka. Jak wynika z ryc. 7, ciężar ciała Q obraca dźwignię do dołu. Aby dźwignię zrównoważyć, należy przyłożyć do dźwigni przeciwnie skierowaną, taką samą co do wartości siłę reakcji R. Wartość tej siły można łatwo wyznaczyć przez oparcie końca dźwigni na wadze. Ramię L tej siły Rjest równe długości dźwigni. Ramię rsiły OJ jest odległością o.ś.c. człowieka umieszczonego na dźwigni jednostronnej, mierzonej od punktu podparcia. Wartość tej współrzędnej można wyznaczyć z warunków równowagi ciała: r= R x L/Q.
Ogólny środek ciężkości całego ciała człowieka jest wektorem wypadkowym (sumą wektorów) środków ciężkości wszystkich 14 segmentów jego ciała. U człowieka, który przyjął postawę stojącą, o.ś.c. znajduje się na wysokości 53-60% wysokości ciała. U małego dziecka o.ś.c. jest położony, ze względu na dużą masę głowy i mniejszą masę nóg, stosunkowo wyżej niż u dorosłego (zob. ryc. 5 i 6).
4.4. Biokinematyka biernego układu ruchu
Podstawową jednostką biernego układu ruchu jest kość, tzw. człon sztywny. Dwie kości związane stawem, tzw. połączeniem ruchomym, stanowią parę bio-kinematyczną. Struktura złożona z większej liczby członów sztywnych, a zatem i par biokinematycznych, tworzy łańcuch biokinematyczny. Przykładem takiego łańcucha biokinematycznego jest zespół struktur tworzących kończynę górną: łopatka - staw ramienny - ramię - staw łokciowy - przedramię - staw promie-niowo-nadgarstkowy. Ogniwem końcowym tego łańcucha jest ręka zakończona palcami. Jeżeli łańcuch biokinematyczny ma jedno ogniwo końcowe swobodne, to wówczas jest łańcuchem otwartym. Połączenie ze sobą ogniw końcowych lub z ogniwem pośrednim (narzędzie pracy, podłoże) tworzy łańcuch biokinematyczny zamknięty. Zbiór łańcuchów biokinematycznych połączonych ze sobą stanowi podstawę biomechanizmu, który tworzy, z punktu widzenia biomechaniki, bierny układ ruchu człowieka.
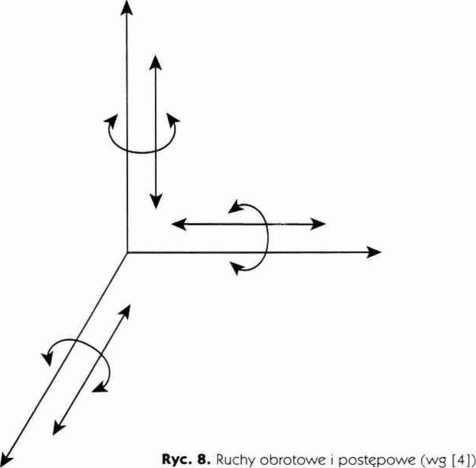
Biomechanizm biernego układu ruchu człowieka jest pojęciem bardziej złożonym. W technice rozpatruje się ruchy dowolne brył sztywnych, a w biokinematy-ce ruchy członów sztywnych (kości). Ruch dowolny może być postępowy i obrotowy, przy czym każdy z nich może być rozłożony na trzy składowe, określone względem trzech wzajemnie do siebie prostopadłych kierunków wyznaczających
Wyszukiwarka
Podobne podstrony:
Wyznaczanie ogólnego środka ciężkości ciała człowieka metodą dźwigni jednostronnej1. Schematyczny
praca nr 2 BIOMECHANIKA Temat: Wyznaczanie ogólnego środka ciężkości ciała człowieka metodą dźwigni
CIMG9920 Wyznaczanie środka ciężkości ciała człowieka (melodii dźwigni jednostronnej
0000021 3 30 Biomechanika kliniczna 30 Biomechanika kliniczna Ryc. 3. Dźwignia jednoramienna w stani
28 Biomechanika kliniczna Ryc. 1. Działanie mięśnia na dźwignię kostną: K0 - kość nieruchoma, O przy
0000024 4 36 Biomechanika kliniczna trzy wymiary otaczającej przestrzeni. Z punktu widzenia teorii m
38 Biomechanika kliniczna 38 Biomechanika kliniczna Ryc. 10. Pom
CIMG9911 Yyznaczanie środka masy ciała człowie Metodą graficzną (ryc. VHŁ2) Twierdzenie Taies
0000029 3 46 Neurofizjologia kliniczna 46 Neurofizjologia kliniczna Ryc. 15. Uproszczony ideogram fu
Biomechanika wyklady0036 Wykład 7Charakterystyki bezwładnościowe ciała człowieka 1. Ruch postępowy c
CIMG9898 WYZNACZANIERODNA MASY CIAŁA CZŁOWIEt Prot. nad/w. dr lub. Zbigniew Trzasko ma IB Zakład
CIMG9902 Wyznaczanie środka masy ciała człowiej Co należy wiedzieć? *1111 kt jest najprostszym obiek
CIMG9904 Wyznaczanie środka masy ciała czlowie Co należy wiedzieć? Twierdzenie o środku masy LŚrodek
CIMG9906 wyznaczanie środka masy ciała człowie Co należy wiedzieć? [Kinematyka opisuje drogę, po jak
CIMG9909 Wyznaczanie środka masy ciała człowiek!
CIMG9912 W CELU WYZNACZENIA POŁOŻENIA ?ODKA MASY CIAŁA CZŁOWIEKA NALE 1. Wybrać duże zdjęcie (2
CIMG9913 W CELU WYZNACZENIA POŁOŻENIA ?ODKA MASY CIAŁA CZŁOWIEKA NALE 4. Obliczyć położenia środków
CIMG9916 Wyznaczanie środka masy ciała człowieka! na zdjęciu, kolejne kroki (punkty) (4 — ś.m. segme
CIMG9917 Wyznaczanie środka masy ciała człowieka _na zdjęciu (oryginał tabe
więcej podobnych podstron