0000021 3

30 Biomechanika kliniczna
30 Biomechanika kliniczna
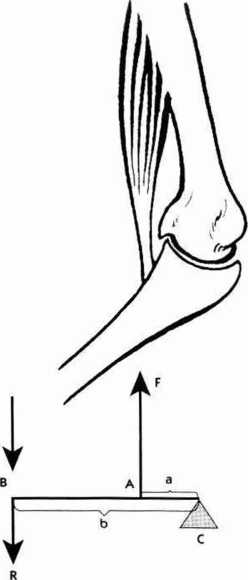
Ryc. 3. Dźwignia jednoramienna w stanie równowagi. Jest to dźwignia o ramieniu (a) krótszym od ramienia siły oporu (B). W stanie równowagi zachodzi układ stosunków wyrażony wzorem: F * a = R * b.
C - punkt oparcia, F - siła mięśnia,
A - punkt przyłożenia siły,
R - siła oporu, B - punkt przyłożenia oporu, a - ramię siły, b - ramię oporu (wg [2])
ny mięśnia, które stanowią jednostki czynnościowe mięśnia wykazujące niezależność. Przykładem są aktony przedni, środkowy i tylny mięśnia naramiennego. Inną cechą funkcjonalną mięśni jest to, że kurcząc się, mogą wywoływać ruch w co najmniej jednym stawne. W związku z tym wyróżnia się klasy mięśni tzw. jedno, dwu oraz wielostawowych. Na przykład mięsień ramienny należy do klasy mięśni dwustawowych (ryc. 4). Ma to znaczenie dla rozumienia anatomii czynnościowej i funkcji aktonów oraz przebiegu wektorów sił względem osi obrotów (stawów) różnych mięśni człowieka. Funkcje mięśni szkieletowych są opisywane w podręcznikach anatomii z odwołaniem się do stanu, gdy układ ruchu nie podlega żadnym oddziaływaniom zewnętrznym. Sytuacje takie należą jednak do
Ryc. 4. Mięsień dwustawowy. Mięsień ramienny zbliża do siebie ramię i przedramię, wywołując ruch w stawie łokciowym. Ale przedramię, zginając się, jednocześnie cofa ramię ku tyłowi, wywołując ruch także w stawie ramiennym (wg [2])
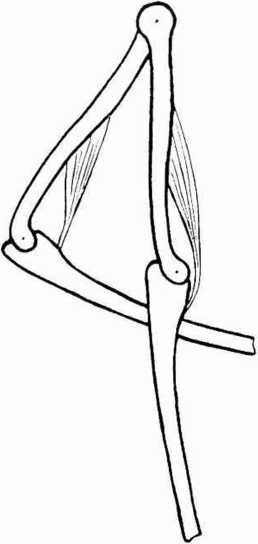
rzadkości. Przykładem jest ruch prostowania w stawie łokciowym bez aktywizacji mięśnia trójgłowego ramienia; paradoksalnie ruch ten realizuje mięsień dwugłowy ramienia. Dzieje się tak podczas działania tzw. zginacza ekscentrycznego, hamującego prostowanie przedramienia, na które działa siła grawitacji.
4.3. Środki ciężkości ciała i poszczególnych segmentów
W biomechanice jest przyjęty model ciała człowieka składający się z 14 poszczególnych segmentów (członów), mających początek i koniec. Są to segmenty nieparzyste, takie jak: głowa (od szczytu czaszki do wcięcia jarzmowego na mostku) i tułów (od wcięcia jarzmowego na mostku do spojenia łonowego), oraz
Wyszukiwarka
Podobne podstrony:
0000023 3 34 Biomechanika kliniczna Ryc. 7. Wyznaczanie o.ś.c. ciała człowieka metodą dźwigni jednos
28 Biomechanika kliniczna Ryc. 1. Działanie mięśnia na dźwignię kostną: K0 - kość nieruchoma, O przy
0000024 4 36 Biomechanika kliniczna trzy wymiary otaczającej przestrzeni. Z punktu widzenia teorii m
38 Biomechanika kliniczna 38 Biomechanika kliniczna Ryc. 10. Pom
0000029 3 46 Neurofizjologia kliniczna 46 Neurofizjologia kliniczna Ryc. 15. Uproszczony ideogram fu
page0054 30 Ryby. 30 Ryby. ......Vk..... Ryc. 18. Schemat krążenia krwi u ryb: a — mały obieg,
42 Neurofizjologia kliniczna Ryc. 12. Umiejscowienie pierścienia zakrętów mózgu należących do części
30 R. Czekanowska-Szlandrowicz Ryc. i. Schemat techniczny urządzenia pomiarowego przedstawiony w dwó
30 Andrzej Szwarc Ryc. 2. Graficzny model ilustrujący niezawodność działań ofensywnych z uwzględnien
0000037 (16) Ryc. 30. D. J. Rtg kręgosłupa: Ryc. 31. D. J. Małe talerze kości
34 (403) 30 NERWY I NACZYNIA Ryc. 54. Nerw kulszowy (n. ischiadicus). Identyfikacja. Czwarta faza ba
65 (ryc. 30 — ab-sf, ryc. 22 i 26). Miąższość tej gliny osiąga w odsłonięciu około 5 m, lecz w miarę
30 20 10 0 Ryc. Porady laktacyjne • Nie dublujemy wyników. Jeśli
skanuj0306 (2) Rys. 11.30 Przekładnie ślimakowe: a) walcowa, b) globoidalna [16] kołem czynnym jest
więcej podobnych podstron