052 5
2.4.1. Mechanizm Rossa
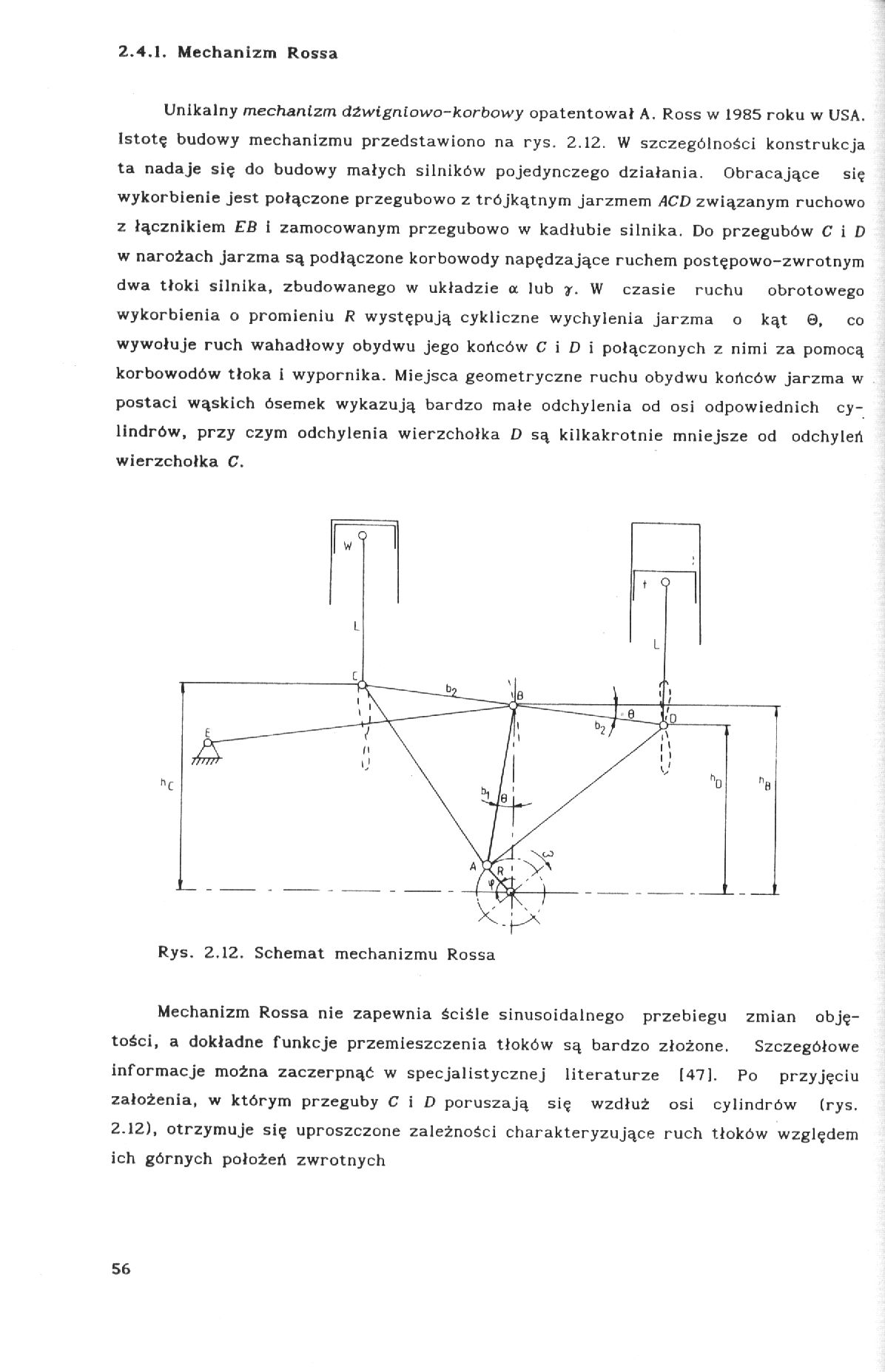
Unikalny mechanizm dźwigniowo-korbowy opatentował A. Ross w 1985 roku w USA. Istotę budowy mechanizmu przedstawiono na rys. 2.12. W szczególności konstrukcja ta nadaje się do budowy małych silników pojedynczego działania. Obracające się wykorbienie jest połączone przegubowo z trójkątnym jarzmem ACD związanym ruchowo z łącznikiem EB i zamocowanym przegubowo w kadłubie silnika. Do przegubów C i D w narożach jarzma są podłączone korbowody napędzające ruchem postępowo-zwrotnym dwa tłoki silnika, zbudowanego w układzie a lub y. W czasie ruchu obrotowego wykorbienia o promieniu R występują cykliczne wychylenia jarzma o kąt 0, co wywołuje ruch wahadłowy obydwu jego końców C i D i połączonych z nimi za pomocą korbowodów tłoka i wypornika. Miejsca geometryczne ruchu obydwu końców jarzma w postaci wąskich ósemek wykazują bardzo małe odchylenia od osi odpowiednich cylindrów, przy czym odchylenia wierzchołka D są kilkakrotnie mniejsze od odchyleń wierzchołka C.
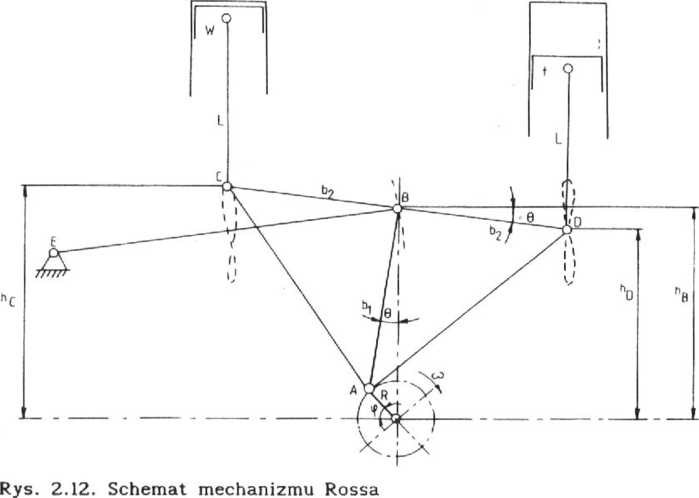
Mechanizm Rossa nie zapewnia ściśle sinusoidalnego przebiegu zmian objętości, a dokładne funkcje przemieszczenia tłoków są bardzo złożone. Szczegółowe informacje można zaczerpnąć w specjalistycznej literaturze (47]. Po przyjęciu założenia, w którym przeguby C i D poruszają się wzdłuż osi cylindrów (rys. 2.12), otrzymuje się uproszczone zależności charakteryzujące ruch tłoków względem ich górnych położeń zwrotnych
56
Wyszukiwarka
Podobne podstrony:
skanuj0408 na otrzymać różne mechanizmy dźwigniowe. Na rysunku 16.4# podano schemat mechanizmu kor b
star266083 83 Skrzynka biegów Rys. 4-6. Mechanizm dźwigni zmiany biegów z wałkiem pośrednim i schema
Mechanika układu korbowego. Kinematyka układu korbowo-tłokowego silnika. Siły gazowe i bezwładności.
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
36 131» Przybliżona synteza sferyoznego mechanizmu dźwigniowo-przegubowego* Arch* Bud* Masz* 1972 z*
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna Rys. 1. Mechanizm dźwigniowy
49 (5) 49 Napęd dźwigników hydraulicznych może być ręczny lub mechaniczny. Dźwignik hydrauliczny skł
Mechanizmy dźwigniowe -definicja Mechanizmy dźwigniowe zbudowane są z członów tworzących ze sobą par
s1 4 Mechanizmy dźwigniowe i ich ogniwa izmach pta- SuwakK—-i w mechaniz- Jarzmo w mechaniz- Wodzik
Pojęcie dźwigni Z fizycznego punktu widzenia mechanizm dźwigni wyjaśnia, jak przy użyciu
Tematyka projektów 1. Kinematyka mechanizmów dźwigniowych i krzywkowych. Kinematyk
SAVE0464 [] Boczne, odchylane szyby sterowane mechanizmem dźwigniowym umożliviajq przewietrzanie kab
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
24 luty 07 (148) 4.1.1. Zasady modelowania mechanizmów w programie AKMBudowa mechanizmów dźwigniowyc
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
więcej podobnych podstron