0725
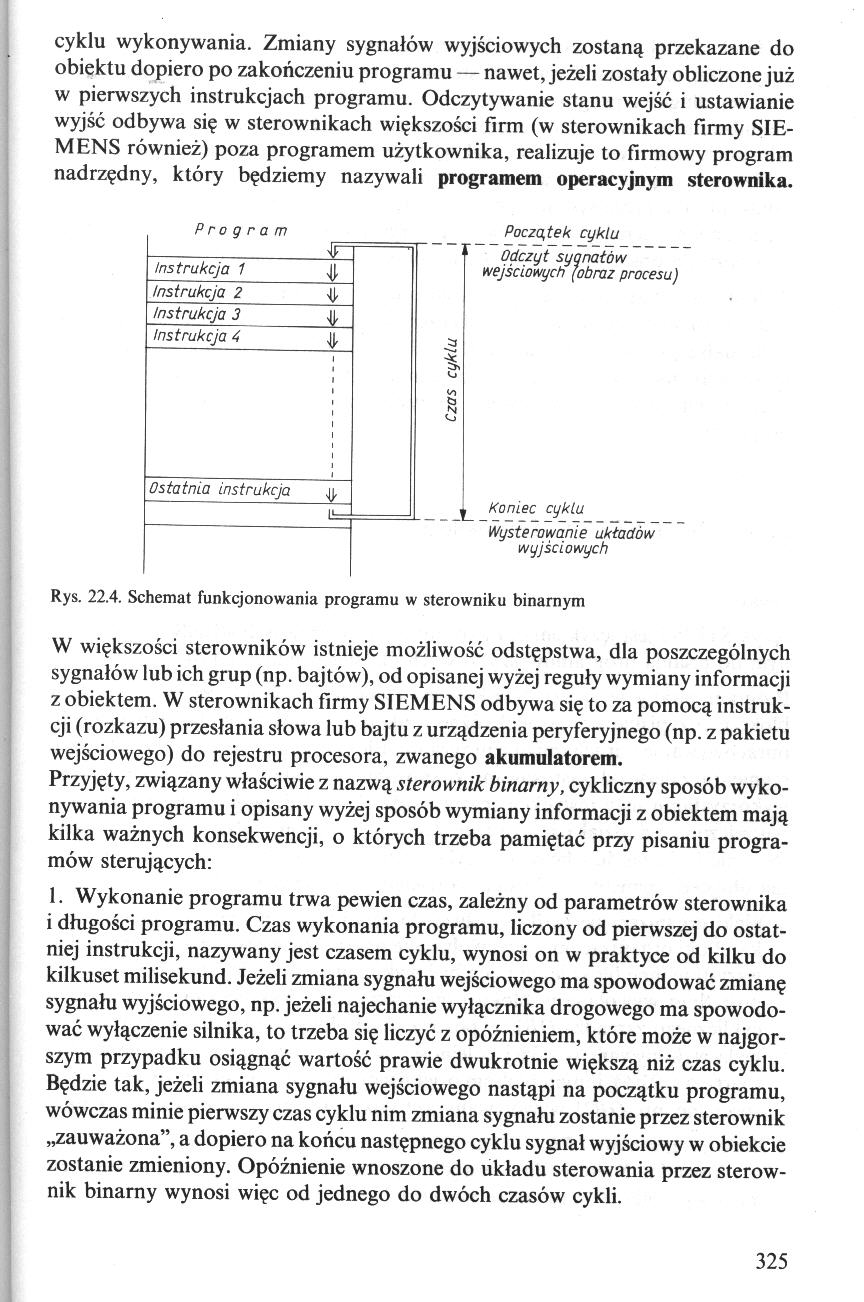
cyklu wykonywania. Zmiany sygnałów wyjściowych zostaną przekazane do obiektu dopiero po zakończeniu programu — nawet, jeżeli zostały obliczone już w pierwszych instrukcjach programu. Odczytywanie stanu wejść i ustawianie wyjść odbywa się w sterownikach większości firm (w sterownikach firmy SIEMENS również) poza programem użytkownika, realizuje to firmowy program nadrzędny, który będziemy nazywali programem operacyjnym sterownika.
Program Początek cyklu
|
łT |
: |
r |
Odczyt sygnałów wejściowych (obraz procesu) | ||
|
Instrukcja 1 |
(1 | ||||
|
Instrukcja 2 |
4 | ||||
|
Instrukcja 3 |
(1 | ||||
|
Instrukcja A |
łł | ||||
|
1 l l |
O | ||||
|
l i 1 1 1 i i i i |
to fi | ||||
|
Ostatnia instrukcja |
U |
Koniec cyklu | |||
|
ii—J |
L | ||||
|
Wysterowanie układów wyjściowych | |||||
Rys. 22.4. Schemat funkcjonowania programu w sterowniku binarnym
W większości sterowników istnieje możliwość odstępstwa, dla poszczególnych sygnałów lub ich grup (np. bajtów), od opisanej wyżej reguły wymiany informacji z obiektem. W sterownikach firmy SIEMENS odbywa się to za pomocą instrukcji (rozkazu) przesłania słowa lub bajtu z urządzenia peryferyjnego (np. z pakietu wejściowego) do rejestru procesora, zwanego akumulatorem.
Przyjęty, związany właściwie z nazwą sterownik binarny, cykliczny sposób wykonywania programu i opisany wyżej sposób wymiany informacji z obiektem mają kilka ważnych konsekwencji, o których trzeba pamiętać przy pisaniu programów sterujących:
1. Wykonanie programu trwa pewien czas, zależny od parametrów sterownika i długości programu. Czas wykonania programu, liczony od pierwszej do ostatniej instrukcji, nazywany jest czasem cyklu, wynosi on w praktyce od kilku do kilkuset milisekund. Jeżeli zmiana sygnału wejściowego ma spowodować zmianę sygnału wyjściowego, np. jeżeli najechanie wyłącznika drogowego ma spowodować wyłączenie silnika, to trzeba się liczyć z opóźnieniem, które może w najgorszym przypadku osiągnąć wartość prawie dwukrotnie większą niż czas cyklu. Będzie tak, jeżeli zmiana sygnału wejściowego nastąpi na początku programu, wówczas minie pierwszy czas cyklu nim zmiana sygnału zostanie przez sterownik „zauważona”, a dopiero na końcu następnego cyklu sygnał wyjściowy w obiekcie zostanie zmieniony. Opóźnienie wnoszone do układu sterowania przez sterownik binarny wynosi więc od jednego do dwóch czasów cykli.
325
Wyszukiwarka
Podobne podstrony:
DSC00032 (28) i[«racyjny Masa Jeżeli sygnał wejściowy zostanie doprowadzony do we
operator wciśnie klawisz odpowiadający literze A, sygnał elektryczny zostanie skierowany do pierwsze
Image401 do licznika BCD. Po zakończeniu zliczania stan licznika dwójkowego zliczającego w przód rep
IMGi90 (3) Zabrał się do pracy dopiero po upomnieniu przez wychowawczynię. Nadszedł moment rozwiązyw
Stretching s038 Do widzenia! Ćwiczenia po zakończonej pracy 1 minuta Dokładnie tak samo, jak przezna
wciągają nas do samochodu. Dopiero po kilku dniach się okazuje, że wszystko się zgadzało tylko pomyl
Kredyt balonowy1 - jest to rodzaj kredytu, w którym ustalana jest kwota do jednorazowej spłaty po z
Konta kosztów nie wykazują w końcu okresu salda (nie wchodzą do bilansu). Dopiero po wielu przeksięg
niwelowane. Podczas wiercenia możliwe jest też pobieranie próbek do badań laboratoryjnych. Po zakońc
str018 019 Tablica rozdzielcza Wskaźnik paliwa Gdy zatankujemy zbiornik do polna, dopiero po przejec
• Zdolność ustroju do szybkiej likwidacji, po zakończonym wysiłku,
Scanned picture 27 (9) jpeg sprawdzać każdorazowo przed przystąpieniem do jego uruchomienia. Po zako
więcej podobnych podstron