09012012945
Konfiguracja kartezjańska (PPP)
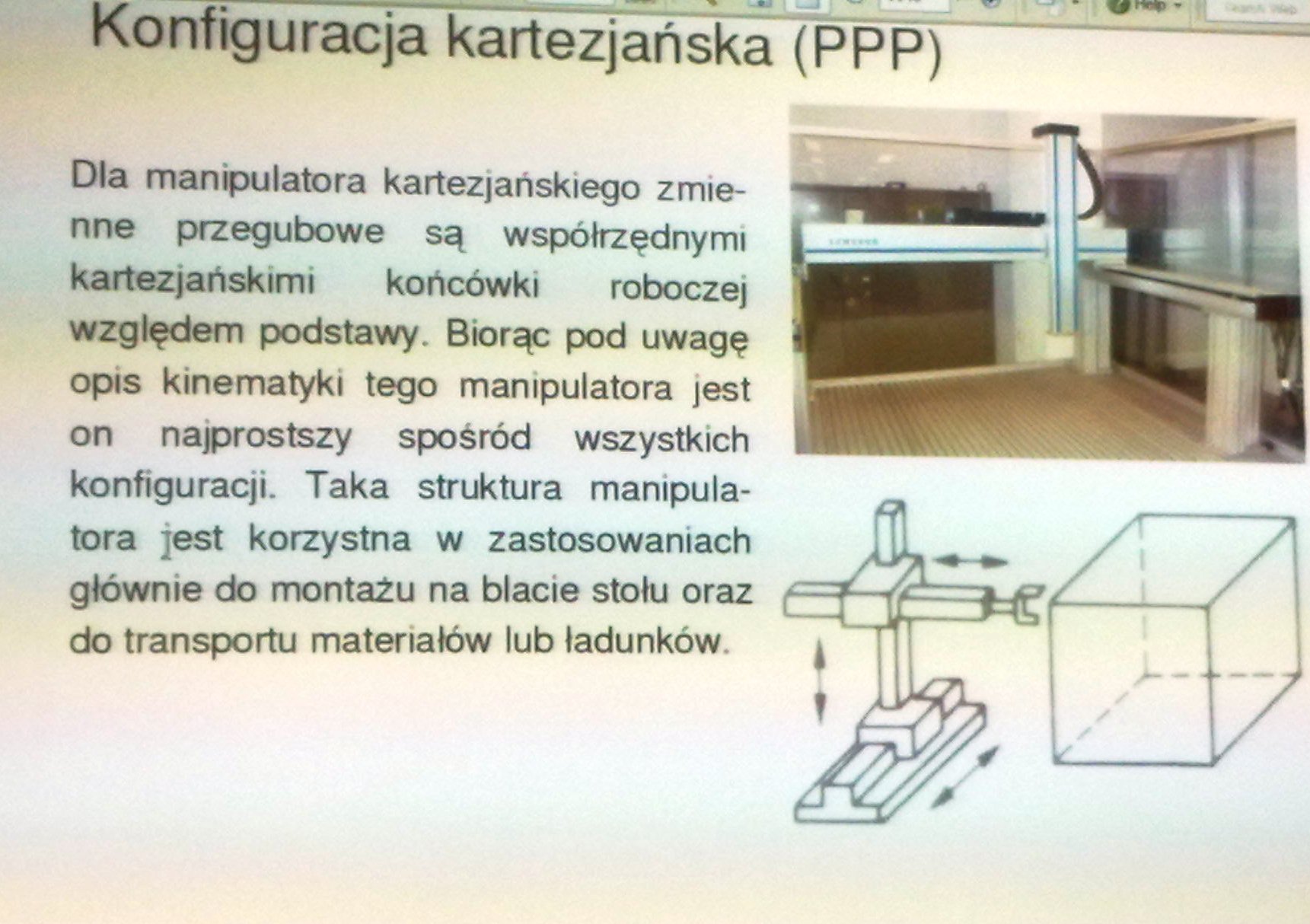
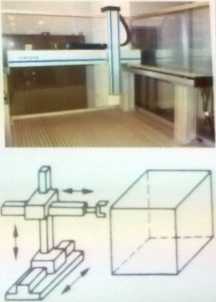
Dla manipulatora kartezjaiiskiego zmienne przegubowe są współrzędnymi kartezjahskimi końcówki roboczej względem podstawy. Biorąc pod uwagę opis kinematyki tego manipulatora jest on najprostszy spośród wszystkich konfiguracji. Taka struktura manipulatora jest korzystna w zastosowaniach głównie do montażu na blacie stołu oraz do transportu materiałów lub ładunków.
Wyszukiwarka
Podobne podstrony:
KLASYFIKACJA NA PODSTAWIE WŁASNOŚCI AGH GEOMETRYCZNYCH KONFIGURACJA KARTEZJAŃSKA (PPP) Manipulator,
KLASYFIKACJA NA PODSTAWIE WŁASNOŚCI AGH GEOMETRYCZNYCH KONFIGURACJA KARTEZJAŃSKA (PPP) Istnieje wiel
9i ~ 9oi Zi2 7T Z2DGx (Mi — M0i), (2.24) gdzie qoi jest wartością zmiennej przegubowej g; w konfigur
W"))J KLASYFIKACJA NA PODSTAWIE WŁASNOŚCI AGH GEOMETRYCZNYCH KONFIGURACJA KARTEZJANSKA
W"))J KLASYFIKACJA NA PODSTAWIE WŁASNOŚCI AGH GEOMETRYCZNYCH KONFIGURACJA KARTEZJANSKA
Image21 C tlz, » o A A 1. Dla jakich wartości zmiennych pętla się wykonuje? Whil
Image4 1. Dla jakich wartości zmiennych pętla się wykona: While((x-21)&&!x
MG 71 Operatory konkatenacji i agregacja• Bardzo przydatny operator dla manipulac
skanuj0026 (187) PHP i MySQL dla każdego Listing 2.9. Zmienna zmieniająca typ w trakcie działania
skanuj0217 (4) 230 PHP i MySQL dla każdego w sesji. Zmienne należy usunąć ręcznie za pomocą przeznac
img096 96Wzór Taylora dla funkcji wielu zmiennych Twierdzenie 8.3* Jeśli funkcje f:fin3K(e,r) —w R m
img302 o otrzymamy następujące równania dla czterech par zmiennych kanonicznych: wj = 0.80*1 - 0.28*
s427 Administrowanie połączeniami sieciowymi 427 Konfigurowanie protokołu PPP w Linuksie 1.
Konfiguracja linii dozorowej dla budynku : Na linię dozorową składają się pętle na poszczególnych
PICT0108 U dla warstwy styropianu o zmiennej grubości: • grubość warstwy stałej d
Skrócona instrukcja konfiguracji skanowania sieciowego Dla: WorkCentre Pro 123/128 Opis: W skanowani
więcej podobnych podstron