1tom324
13. ELEKTROTERMIA 650
13. ELEKTROTERMIA 650
1
A 3
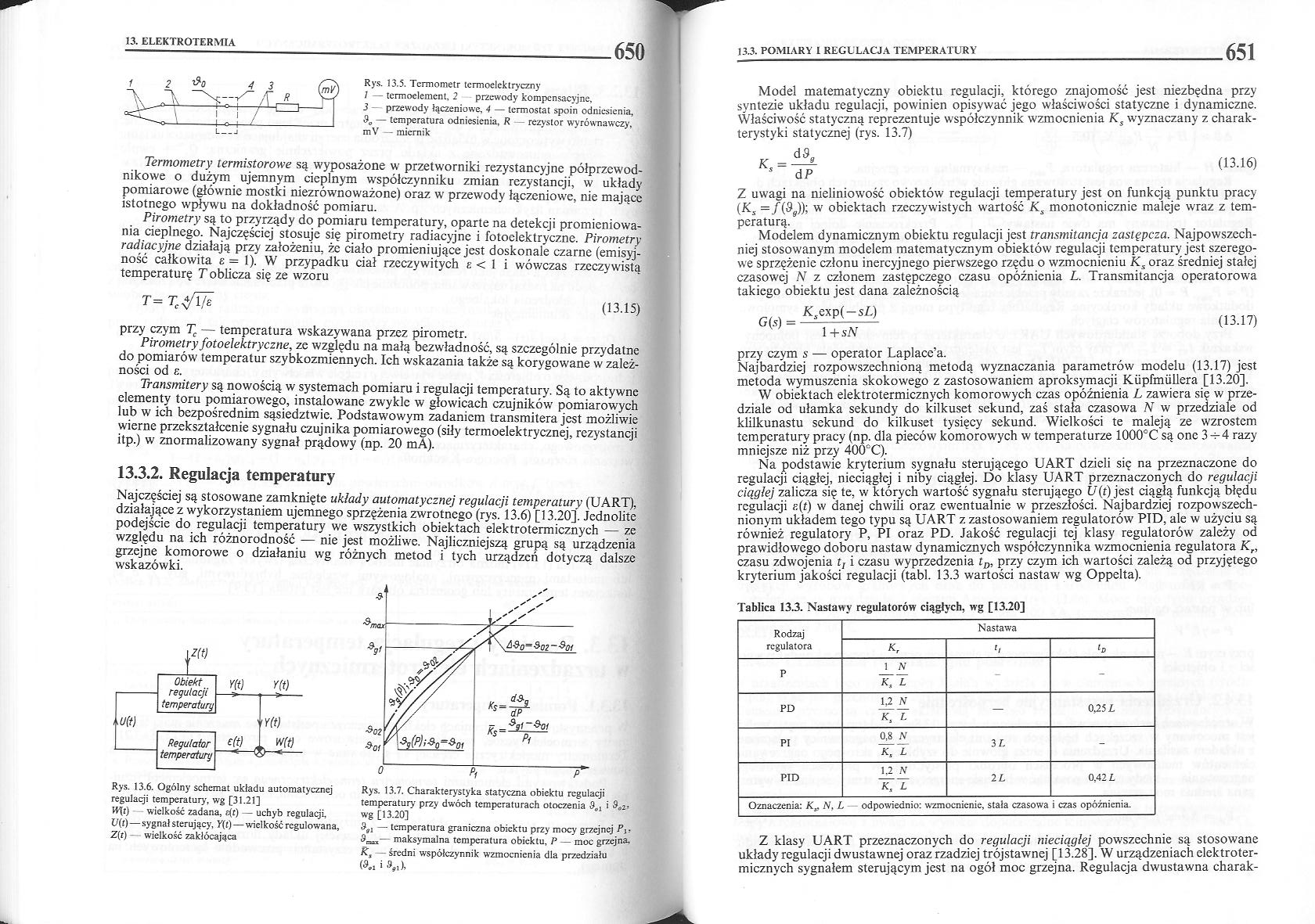
Rys. 13.5. Termometr termoelektryczny 1 — termoelement, 2 przewody kompensacyjne,
z
I I -4—0-!-
3 - przewody łączeniowe, 4 — termostat spoin odniesienia,
— temperatura odniesienia, R - rezystor wyrównawczy, mV — miernik
Termometry termistorowe są wyposażone w przetworniki rezystancyjnc półprzewodnikowe o dużym ujemnym cieplnym współczynniku zmian rezystancji, w układy pomiarowe (głównie mostki niezrównoważone) oraz w przewody łączeniowe, nie mające istotnego wpływu na dokładność pomiaru.
Pirometry są to przyrządy do pomiaru temperatury, oparte na detekcji promieniowania cieplnego. Najczęściej stosuje się pirometry radiacyjne i fotoclcktryczne. Pirometry radiacyjne działają przy założeniu, żc ciało promieniujące jest doskonale czarne (emisyj-ność całkowita e = 1). W przypadku ciał rzeczywitych a < 1 i wówczas rzeczywistą temperaturę T oblicza się ze wzoru
T = Tcy1/e (13.15) przy czym Tc — temperatura wskazywana przez pirometr.
Pirometry fotoelektryczne, ze względu na małą bezwładność, są szczególnie przydatne do pomiarów temperatur szybkozmiennych. Ich wskazania także są korygowane w zależności od s.
Transmitery są nowością w systemach pomiaru i regulacji temperatury. Są to aktywne elementy toru pomiarowego, instalowane zwykle w głowicach czujników pomiarowych lub w ich bezpośrednim sąsiedztwie. Podstawowym zadaniem transmitera jest możliwie wierne przekształcenie sygnału czujnika pomiarowego (siły termoelektrycznej, rezystancji itp.) w znormalizowany sygnał prądowy (np. 20 mA).
13.3.2. Regulacja temperatury
Najczęściej są stosowane zamknięte układy automatycznej regulacji temperatury (UART), działające z wykorzystaniem ujemnego sprzężenia zwrotnego (rys. 13.6) [13.20], Jednolite podejście do regulacji temperatury we wszystkich obiektach elektrotermicznych — ze względu na ich różnorodność — nie jest możliwe. Najliczniejszą grupą są urządzenia grzejne komorowe o działaniu wg różnych metod i tych urządzeń dotyczą dalsze wskazówki.

Rys. 13.6. Ogólny schemat układu automatycznej regulacji temperatur)-, wg [31.21]
W[t) wielkość zadana, c(f) — uchyb regulacji, U(t)—sygnał sterujący, Y(t)—wielkość regulowana, Z(r) - wielkość zakłócająca
Rys. 13.7. Charakterystyka statyczna obiektu regulacji temperatury przy dwóch temperaturach otoczenia S.i i 9.2. wg [13.20]
— temperatura graniczna obiektu przy mocy grzejnej F,.
— maksymalna temperatura obiektu, P — moc grzejna, Ks — średni współczynnik wzmocnienia dla przedziału
(3., i
Model matematyczny obiektu regulacji, którego znajomość jest niezbędna przy syntezie układu regulacji, powinien opisywać jego właściwości statyczne i dynamiczne. Właściwość statyczną reprezentuje współczynnik wzmocnienia Ks wyznaczany z charakterystyki statycznej (rys. 13.7)

(13.16)
Z uwagi na nieliniowość obiektów regulacji temperatury jest on funkcją punktu pracy (Ks =/(3s)); w obiektach rzeczywistych wartość Ks monofonicznie maleje wraz z temperaturą.
Modelem dynamicznym obiektu regulacji jest transmitancja zastępcza. Najpowszechniej stosowanym modelem matematycznym obiektów' regulacji temperatury jest szeregowe sprzężenie członu inercyjnego pierwszego rzędu o wzmocnieniu Ks oraz średniej stałej czasowej N z członem zastępczego czasu opóźnienia L. Transmitancja operatorowa takiego obiektu jest dana zależnością
G(s) =
Kscxp(-sL) 1 +sN
(13.17)
przy czym s — operator Laplacc’a.
Najbardziej rozpowszechnioną metodą wyznaczania parametrów modelu (13.17) jest metoda wymuszenia skokowego z zastosowaniem aproksymacji Kiipfmiiilera [13.20].
W obiektach elektrotermicznych komorowych czas opóźnienia L zawiera się w przedziale od ułamka sekundy do kilkuset sekund, zaś stała czasowa N w przedziale od klilkunastu sekund do kilkuset tysięcy sekund. Wielkości te maleją ze wzrostem temperatury pracy (np. dla pieców komorow-ych w temperaturze 1000‘C są one 3-^4 razy mniejsze niż przy 400°C).
Na podstawie kryterium sygnału sterującego UART dzieli się na przeznaczone do regulacji ciągłej, nieciągłej i niby ciągłej. Do klasy UART przeznaczonych do regulacji ciągłej zalicza się te, w których wartość sygnału sterująego t/(f) jest ciągłą funkcją błędu regulacji s(t) w danej chwili oraz ewentualnie w przeszłości. Najbardziej rozpowszechnionym układem tego typu są UART z zastosowaniem regulatorów PTD, ale w użyciu są również regulatory P, PI oraz PD. Jakość regulacji tej klasy regulatorów zależy od prawidłowego doboru nastaw dynamicznych współczynnika wzmocnienia regulatora Kr, czasu zdwojenia t, i czasu wyprzedzenia tD, przy czym ich wartości zależą od przyjętego kryterium jakości regulacji (tabl. 13.3 wartości nastaw wg Oppelta).
Tablica 13.3. Nastawy regulatorów ciągłych, wg [13.20]
|
Rodzaj |
Nastawa | ||
|
regulatora |
</ |
lD | |
|
P |
1 N ~KX~L |
- |
- |
|
PD |
1,2 N Kt L |
- |
025 L |
|
PI |
0,8 N l |
31. |
- |
|
PTD |
1,2 N ~KS~L |
2 L |
0,42 L |
Oznaczenia: Kif N, L odpowiednio: wzmocnienie, stała czasowa i czas opóźnienia.
Z klasy UART przeznaczonych do regulacji nieciągłej powszechnie są stosowane układy regulacji dwustawnej oraz rzadziej trójstawnej [13.28]. W urządzeniach elektrotermicznych sygnałem sterującym jest na ogół moc grzejna. Regulacja dwustawna charak-
Wyszukiwarka
Podobne podstrony:
1tom325 13. ELEKTROTERM1A teryzuje się ciągłą oscylacją temperatury w otoczeniu wartości zadanej. Am
1tom170 7. ELEKTRONIKA 342 Rys.7.13. Proces przełączania diody: ładunek przejściowy Rys. 7.14. Dioda
1tom321 13. ELEKTROTF. R MIA 644 !/ /,j Nagrzewanie elekironowe 1>SI Nagrzewanie plazmowe Spawani
1tom322 13. ELEKTROTERMIA -64613.2.2. Obliczanie oporów cieplnych W prostych przypadkach (zagadnieni
1tom326 13. ELEKTROTERM1A 654 Tablica 13.4. Podstawowe właściwości niektórych stopów austenitycznych
1tom327 13. ELEKTROTERMIA 656 Tablica 13.7. Podstawowe właściwości materiałów
1tom328 13. ELEKTROTF.RMIA 658 niższa temperatura przewodu, mniejsza gęstość prądu, a tym samym więk
1tom329 13. ELEKTROTERMIA 660 Konstrukcja urządzeń rezystancyjnych pośrednich komorowych Są to urząd
1tom333 13. ELEKTROTERM1A -668 Rys. 13.19. Przekrój poprzeczny termoelektrolizera z anodą Sóderberga
1tom335 13. ELEKTROTERMIA 672 Rys. 13.24. Stalownicze urządzenie łukowe z trójfazowym piecem wytopow
1tom337 13. ELEKTROTERMIA 676 Rys. 13.27. Uproszczony schemat zastępczy stalowniczego urządzenia łuk
1tom340 13. ELEKTROTERMIA 682 Rys. 13.32. Głębokość wnikania: a) rozkład gęstości prądu przy padaniu
1tom343 13. ELEKTROTERMIA -688 Rys. 13.35. Zależność gęstości powierzchniowej mocy czynnej od głębok
1tom344 13. ELEKTROTERMIA 690 Rys. 13.37. Piece indukcyjne: a) kanałowy; b) tyglowy (bez pokrywy) 1
3tom352 11. OCHRONA PRZECIWPORAŻENIOWA W INSTALACJACH ELEKTRYCZNYCH 706 Rys. 11.13. Przykład sieci T
Grill z płytą żelazną i?ramiczną12 Zużycie energii elektrycznej [kW] Rys. 13. Wykres zużycia energii
1tom323 13. F.LF.KTROTF.RMIA 648 13. F.LF.KTROTF.RMIA 648 Rys. 13.4. Średnic współczynniki przejmowa
Image423 Rys. 4.498. Schemat elektryczny układu Rys. 4.499. Schemat elektryczny ro
więcej podobnych podstron