364 365
364

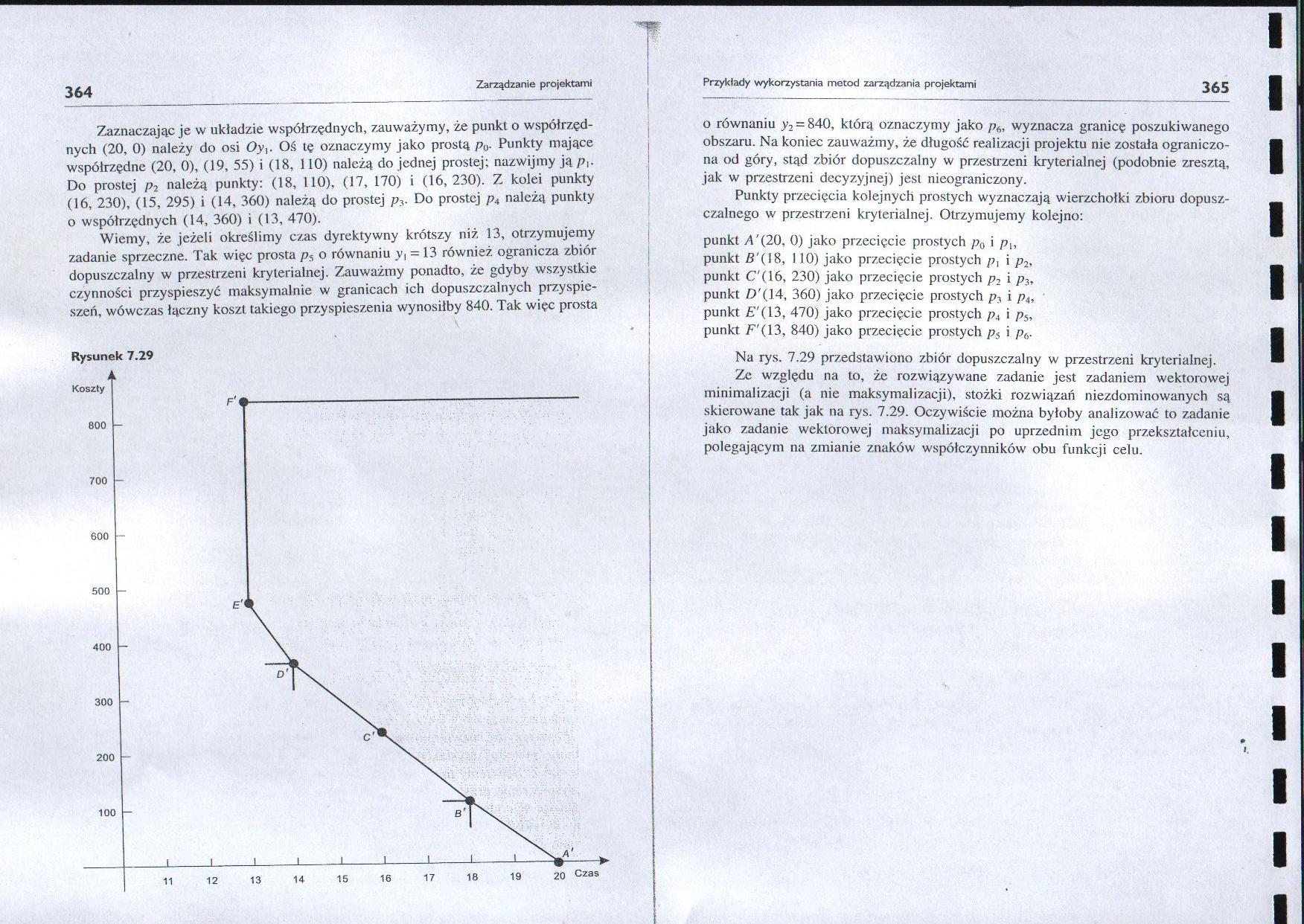
Zaznaczając je w układzie współrzędnych, zauważymy, że punkt o współrzędnych (20, 0) należy do osi Oy,. Oś tę oznaczymy jako prostą pu. Punkty mające współrzędne (20, 0), (19, 55) i (18, 110) należą do jednej prostej; nazwijmy ją /?,. Do prostej p2 należą punkty: (18, 110), (17, 170) i (16,230). Z kolei punkty (16, 230), (15, 295) i (14, 360) należą do prostej p,. Do prostej pĄ należą punkty o współrzędnych (14, 360) i (13, 470).
Wiemy, że jeżeli określimy czas dyrektywny krótszy niż 13, otrzymujemy zadanie sprzeczne. Tak więc prosta p5 o równaniu y( = 13 również ogranicza zbiór dopuszczalny w przestrzeni krylerialnej. Zauważmy ponadto, że gdyby wszystkie czynności przyspieszyć maksymalnie w granicach ich dopuszczalnych przyspieszeń, wówczas łączny koszt takiego przyspieszenia wynosiłby 840. Tak więc prosta
Rysunek 7.29 A
Koszty
800 700 600
500
400
300
200
100
I I _1__I__I_____U--1----H
13 14 15 16 17 18 19 20 Czas
►
11
12
Przykłady wykorzystania metod zarządzania projektami
365
o równaniu v2 = 840, którą oznaczymy jako ph, wyznacza granicę poszukiwanego obszaru. Na koniec zauważmy, że długość realizacji projektu nie została ograniczona od góry, stąd zbiór dopuszczalny w przestrzeni kryterialnej (podobnie zresztą, jak w przestrzeni decyzyjnej) jest nieograniczony.
Punkty przecięcia kolejnych prostych wyznaczają wierzchołki zbioru dopuszczalnego w przestrzeni kryterialnej. Otrzymujemy kolejno:
punkt A\20, 0) jako przecięcie prostych p0 i /?,, punkt B'(18, 110) jako przecięcie prostych /?, i p2, punkt C'(16, 230) jako przecięcie prostych p2 i p3, punkt £>'(14. 360) jako przecięcie prostych p3 i p4, punkt £'(13, 470) jako przecięcie prostych pĄ i p5, punkt F'(13, 840) jako przecięcie prostych ps i pb.
Na rys. 7.29 przedstawiono zbiór dopuszczalny w przestrzeni kryterialnej.
Ze względu na to, że rozwiązywane zadanie jest zadaniem wektorowej minimalizacji (a nie maksymalizacji), stożki rozwiązań niezdominowanych są skierowane tak jak na rys. 7.29. Oczywiście można byłoby analizować to zadanie jako zadanie wektorowej maksymalizacji po uprzednim jego przekształceniu, polegającym na zmianie znaków współczynników obu funkcji celu.
Wyszukiwarka
Podobne podstrony:
odpowiedniej ilości par (*,y) zaznacza się je w układzie współrzędnych i dokonuje aproksymacji, otrz
61 (185) 191ODPOWIEDZI. WSKAZÓWKI. ROZWIĄZANIA 530. « v / sin órs/^cos u. Rozwiązanie. Zauważmy. Z
Scan 2 86 WOJCIECH KALAGA haj). Nietrudno zauważyć, że pierwsza opcja grozi powrotem do imma-nentyzm
Obraz0067 67 W układzie odniesienia obrabiarki składowe siły skrawania są równoległe do osi obrabiar
skanowanie0027 Warto zauważyć, że klasyczne, behawioralne i ilościowe podejścia do zarządzania nie m
556 XIII. Całki niewłaściwe Łatwo można zauważyć, że gdy x -► 0, funkcja podcałkowa dąży do 0, a
Ważne jest, aby zauważyć, że poświadczenie EuroPsy jest skierowane do psychologów europejskich, czyl
DSC00029 (36) 1. W układzie współrzędnych na płaszczyźnie zaznaczyć obszar ograniczony krzywymi. Na&
rama= 10 kN 1. Umieszczamy ramę w globalnym układzie współrzędnych X,Y,Z 2. Zaznac
DSCN4693 Na podstawie wykresu obiegu silnika cieplnego w układzie o współrzędnych T-S można łatwo za
33327 PC043387 1. Repety®® Przykład 1.78 Aby zaznaczyć w układzie współrzędnych zbiór rozwiązań nier
4 ?dania zmęczeniowe metali�4 m układzie współrzędnych zaznaczyć punkiy Ti(cki, o^0
img044 1 — Jx^: + y1 — 9 r LI- a) Zaznaczyć w układzie współrzędnych dziedzinę funkcji i warstwicę
więcej podobnych podstron