406 407
406 Programowanie dynamiczne
9.2.4. Zasada optymalności Bellmana i równania optymalności
Rozwiązując zadanie metodą programowania dynamicznego, wykorzystamy zasadę optymalności Bellmana. W ślad za jej twórcą możemy sformułować ją następująco:
Zasada optymalności
Strategia optymalna ma tą własność, że niezależnie od stanu początkowego i decyzji początkowej, pozostałe decyzje muszą stanowić ciąg optymalny ze wzglądu na stan wynikający z pierwszej decyzji-
Zasada optymalności pozwala na dekompozycję zadania wyjściowego na ciąg powiązanych ze. sobą prostszych zadań, które rozwiązujemy kolejno, rozpoczynając od ostatniego etapu.
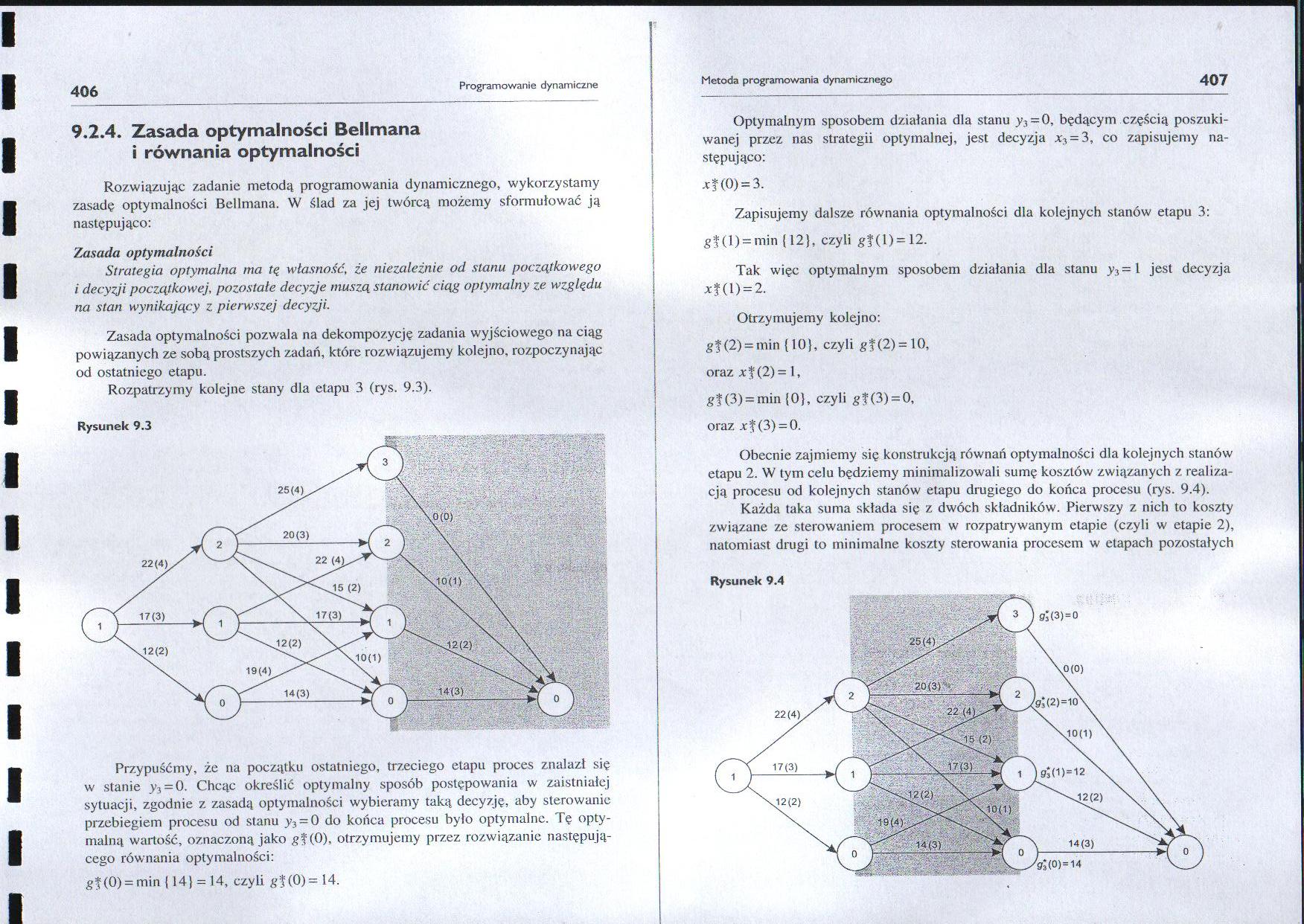
Rozpatrzymy kolejne stany dla etapu 3 (rys. 9.3).
Rysunek 9.3
Przypuśćmy, że na początku ostatniego, trzeciego etapu proces znalazł się w stanie y, = 0. Chcąc określić optymalny sposób postępowania w zaistniałej sytuacji, zgodnie z zasadą optymalności wybieramy taką decyzję, aby sterowanie przebiegiem procesu od stanu y3 = 0 do końca procesu było optymalne. Tę optymalną wartość, oznaczoną jako gt(0). otrzymujemy przez rozwiązanie następującego równania optymalności:
gf (0) = min 114) = 14, czyli gt(0)= 14.
Metoda programowania dynamicznego
Optymalnym sposobem działania dla stanu y.? = 0, będącym częścią poszukiwanej przez nas strategii optymalnej, jest decyzja X*, - 3, co zapisujemy następująco:
x?(0) = 3.
Zapisujemy dalsze równania optymalności dla kolejnych stanów etapu 3: £*(1) = min {12}, czyli gf(l) = 12.
Tak więc optymalnym sposobem działania dla stanu y3 = 1 jest decyzja xf (1) = 2.
!
Otrzymujemy kolejno: gf (2) = min {10}, czyli g?(2) = 10, oraz xf (2) = I,
g$(3) = min {0}, czyli gf(3) = 0, oraz x?(3) = 0.
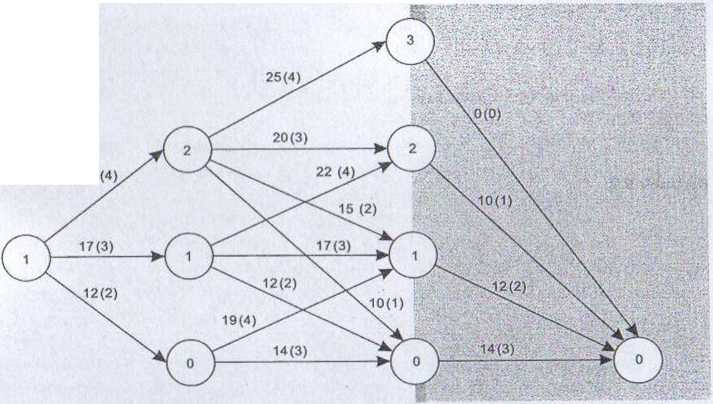
Obecnie zajmiemy się konstrukcją równań optymalności dla kolejnych stanów etapu 2. W tym celu będziemy minimalizowali sumę kosztów związanych z realizacją procesu od kolejnych stanów etapu drugiego do końca procesu (rys. 9.4).
Każda taka suma składa się z dwóch składników. Pierwszy z nich to koszty związane ze sterowaniem procesem w rozpatrywanym etapie (czyli w etapie 2), natomiast drugi to minimalne koszty sterowania procesem w etapach pozostałych
Rysunek 9.4
22
9a(0)= 14
Wyszukiwarka
Podobne podstrony:
Twórcą teorii programowania dynamicznego jest Richard Bellman, który opracował jej podstawy
412 413 412 Programowanie dynamiczne 9. Konstruujemy optymalną realizację procesu. Korzystając z opt
3b138c6b90bcd17amed Korzystając z algorytmu programowania dynamieznego znajdź optymalne upakowanie p
PROGRAMOWANIE DYNAMICZNE 1. Metoda optymalizacyjna do rozwiązywania pewnej klasy
egzamin2009 2 .1 • Korzystając z algorytmu programowania dynamicznego znajdź optymalne upakowanie pl
Stosując metodologię programowania dynamicznego oraz ideę algorytmu sekwencyjnego można rozwiązać ba
Programowanie dynamiczne (6 godz) 1. Zasada optymalności Bellmana 2.
410 411 410 Programowanie dynamiczne Przedstawione powyżej równania optymalności oraz ich rozwiązani
Od wydawcy Metody programowania dynamicznego (czy też szerzej - dynamicznej optymalizacji") i
ZASTOSOWANIE PROGRAMOWANIA LINIOWO-DYNAMICZNEGO DO OPTYMALIZACJI STANÓW MAGAZYNOWYCH JOANNA
16 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
8 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
10 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów magazynowych
12 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
14 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
Procedura optymalizacji metodą programowania dynamicznego Programowanie dynamiczne to metoda
więcej podobnych podstron