CCI20111111�164
noszącą 96-4-97% obrotów synchronicznych. Na wykresie momentów znamionowych obciążeniu silnika odpowiada punkt D i moment znamionowy Mn =DE. Przy zmniejszaniu obciążenia silnika liczba obrotów na minutę wzrasta, przy zwiększaniu obciążenia — zmniejsza się, punktu D przesuwa się przy tym po krzywej momentów na odcinku BD.
Największe obciążenie, przy jakim silnik może jeszcze pracować, odpowiada punktowi B krzywej (ABDF — największy moment obrotowy Mmaz = BC). Przy większym obciążeniu prędkość obrotowa silnika zaczyna maleć, jego moment obrotowy zmniejsza się wg krzywej BA i silnik zatrzymuje się.
Praca silnika przy obciążeniu go największym momentem nie jest stabilna. Na tym samym wykresie przedstawiono przebieg zmienności prądu Ii stojana w procentach prądu znamionowego In = 100%.
Stosunek momentu największego MmaX do momentu znamio-M
nowego Mn, czyli ™.ax , nazywamy przeciążalnością silnika, któ-M-n
ra wynosi zwykle 1,6-4-2,5. Punkt B dzieli krzywą momentów na dwie części: część BD, która odpowiada pracy silnika, i część BA odpowiadająca rozruchowi silnika.
Zależność momentu obrotowego silnika od innych wielkości rozważyliśmy w założeniu, że wartość skuteczna napięcia doprowadzonego do stojana jest stała. Można udowodnić, że moment obrotowy silnika indukcyjnego jest wprost proporcjonalny do kwadratu napięcia, czyli
M = Cil/2
Wobec powyższego należy mieć na względzie dużą wrażliwość silnika indukcyjnego na wahania napięcia w sieci.
Bezpośrednie przyłączenie stojana silnika indukcyjnego zwartego powoduje, że w pierwszej chwili prąd rozruchowy silnika osiąga natężenie 6 do 8 razy większe od natężenia prądu znamionowego (rys. 14-6). Prąd ten jest krótkotrwały i wobec tego pomimo dużego natężenia nie jest groźny dla silnika. Powoduje on jednak w sieci zasilającej silnik znaczny spadek napięcia, co odbija się ujemnie na pracy innych odbiorników przyłączonych do tej sieci. Z tego względu niektóre zakłady elektroenergetyczne nie zezwalają na przyłączenie do sieci silników indukcyjnych zwartych o mocach większych od 3 do 4 kW.
Dla ograniczenia prądu rozruchowego silników zwartych na czas rozruchu obniża się doprowadzone do silników napięcie. Wadą tego sposobu jest jednak zmniejszenie momentu rozruchowego w stosunku do kwadratu zmniejszonego napięcia.
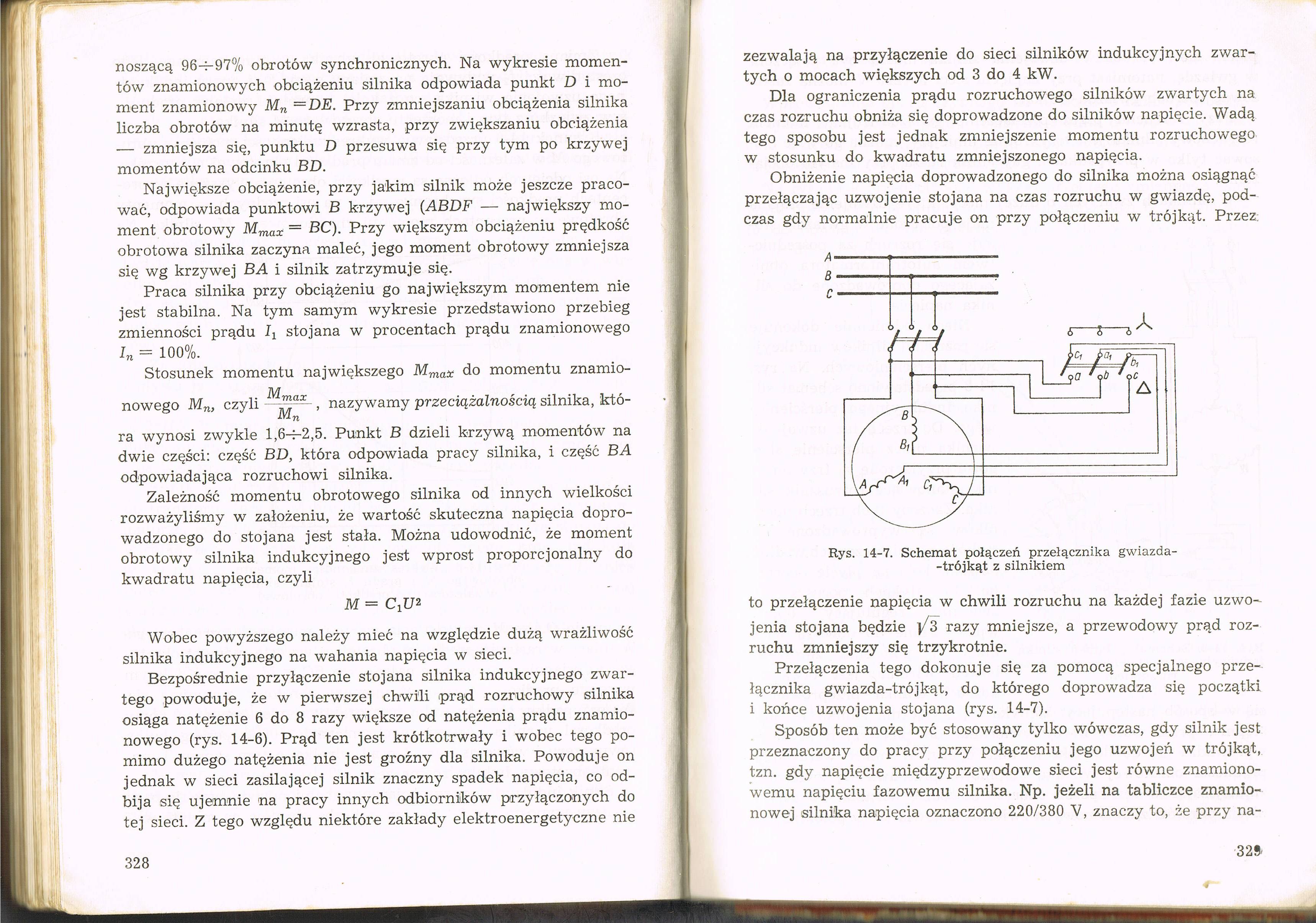
Obniżenie napięcia doprowadzonego do silnika można osiągnąć przełączając uzwojenie stojana na czas rozruchu w gwiazdę, podczas gdy normalnie pracuje on przy połączeniu w trójkąt. Przez:
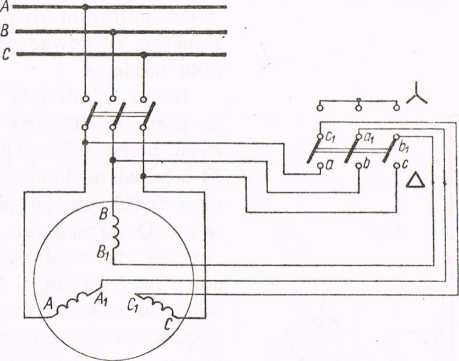
Rys. 14-7. Schemat połączeń przełącznika gwiazda--trójkąt z silnikiem
to przełączenie napięcia w chwili rozruchu na każdej fazie uzwojenia stojana będzie |/3 razy mniejsze, a przewodowy prąd rozruchu zmniejszy się trzykrotnie.
Przełączenia tego dokonuje się za pomocą specjalnego przełącznika gwiazda-trójkąt, do którego doprowadza się początki i końce uzwojenia stojana (rys. 14-7).
Sposób ten może być stosowany tylko wówczas, gdy silnik jest przeznaczony do pracy przy połączeniu jego uzwojeń w trójkąt, tzn. gdy napięcie międzyprzewodowe sieci jest równe znamionowemu napięciu fazowemu silnika. Np. jeżeli na tabliczce znamionowej silnika napięcia oznaczono 220/380 "V, znaczy to, że przy na-
329-
Wyszukiwarka
Podobne podstrony:
96 97 2 ich dzieci. Na zakończenie rozdajemy modelinowe krasnoludki jako pamiątkę ze spotkania, paku
96 97 (2) C»[*l Chodzisz na lekcje zaćpor.y, podbierasz matce pieniądze z torebki rośnie ci toleranc
Rys. 6. Jeżeli koło osi poziomej obrócimy o 180° wykres momentów dodatnich i nałożymy go na wykres m
schemat2 Belka - Nowy ProjektJS
10945759y2879207426190&2611276444824094 o 1. Przedstawić na wykresie p(V), T(s) i
Część 1 15. ZADANIA POWTÓRKA 2 Wykres momentów od obciążenia zewnętrznego na słupie pochyłym ma
Untitled Scanned 42 (3) ■wzdłuż kierunków X2: A2a=-^R2A=-(la-la)=0. Wykresy momentów od obciążeń jed
334 (24) - 334 - Wykres topograficzny prądów przedstawia rys. 3.97.3 (ze względu na dnia różnice mię
96 97 1. * #zajęć zna mai zainteresowań muzycznych na podstawie piosenkiwrozsypcew IJ i5 J i w ♦ • «
96 97 (15) 96 UKAZY I USZKODZENIA SPORTOWE Z badań De Palmy wynika, że po 50 r. ż. jedna na 4 osoby
96 97 (17) być (powinna być!) prowadzona na gruncie pedagogiki ogólnej i metodologii pedagogiki oraz
96 97 (23) 96 Częić II. Podstawy mlkriwkonomlt Ro/d/ial 3. PodUio; teorii wyboru konsumenta 97 K waj
96 97 (5) 96 Z ii-uii-/na tkspunsj* przcdsiębiorarw — wyjaśnienia teoretyczne pośrednich w ujęciu kr
96 97 (7) 96 WADY KOŃCZYN DOLNYCH - Pw: stanie przed ławką ruch: wstępowanie na ławkę (zwracać uwagę
więcej podobnych podstron