Image 55
59
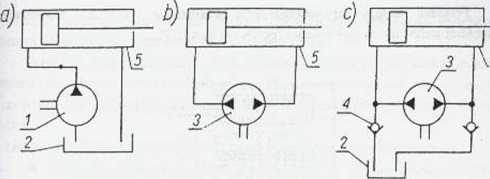
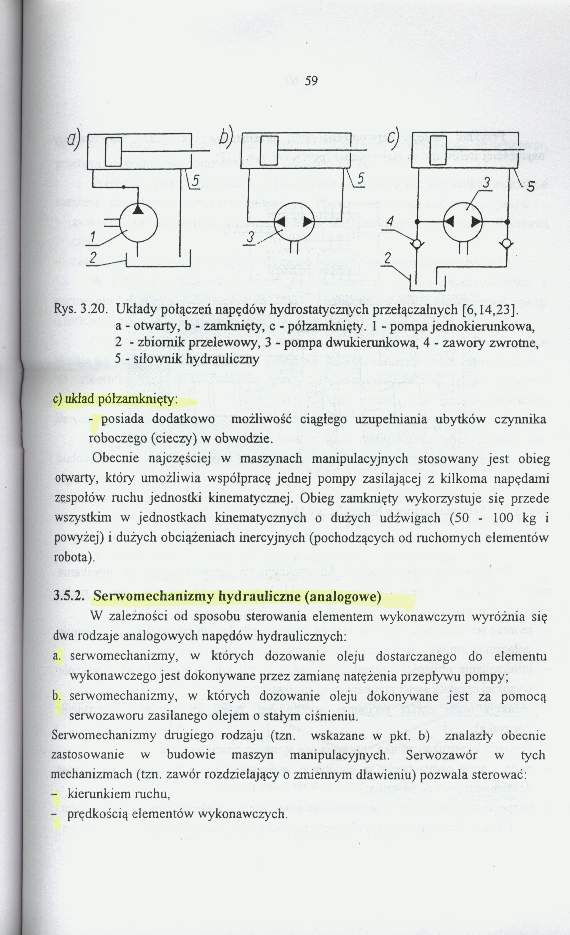
Rys. 3.20. Układy połączeń napędów hydrostatycznych przełączalnych [6,14,23].
a - otwarty, b - zamknięty, c - półzamknięiy. 1 - pompa jednokierunkowa,
2 - zbiornik przelewowy, 3 - pompa dwukierunkowa, 4 - zawory zwrotne,
5 - siłownik hydrauliczny
c) układ półzamknięiy:
- posiada dodatkowo możliwość ciągłego uzupełniania ubytków czynnika roboczego (cieczy) w obwodzie.
Obecnie najczęściej w maszynach manipulacyjnych stosowany jest obieg otwarty, który umożliwia współpracę jednej pompy zasilającej z kilkoma napędami zespołów ruchu jednostki kinematycznej. Obieg zamknięty wykorzystuje się przede wszystkim w jednostkach kinematycznych o dużych udźwigach (50 - 100 kg i powyżej) i dużych obciążeniach inercyjnych (pochodzących od ruchomych elementów robota).
3.5.2. Serwomechanizmy hydrauliczne (analogowe)
W zależności od sposobu sterowania elementem wykonawczym wyróżnia się dwa rodzaje analogowych napędów hydraulicznych:
a. serwomechanizmy, w których dozowanie oleju dostarczanego do elementu wykonawczego jest dokonywane przez zamianę natężenia przepływu pompy;
b. serwomechanizmy, w których dozowanie oleju dokonywane jest za pomocą serwozaworu zasilanego olejem o stałym ciśnieniu.
Serwomechanizmy drugiego rodzaju (tzn. wskazane w pkt. b) znalazły obecnie zastosowanie w budowie maszyn manipulacyjnych. Serwozawór w tych mechanizmach (tzn. zawór rozdzielający o zmiennym dławieniu) pozwala sterować:
- kierunkiem mchu,
- prędkością elementów wykonawczych.
Wyszukiwarka
Podobne podstrony:
Strona�26 1,5 30 1,5 Rys. 19 Rys.20 Węzeł połączenia ściany z płytą balkonową przedstawiono na rysun
Rys. 17. Układy połączeń rezystorów między trzema punktami węzłowymi: a) w trójkąt; b) w gwiazdę
98 (55) UKŁAD ROZRZĄDU 20 19 18 17 8 16 15 14 Rysunek 2.5 ZNAKI KONTROLNE DO USTAW
Rys. 13. Układy sterowania stanowiska laboratoryjnego: 1-przełącznik zmiany kierunku jazdy modeloweg
IMG 75 (3) Z. UKŁADY POŁĄCZEŃ STACJI )tv
IMG 80 (3) UKŁADY POŁĄCZEŃ STACJI średnio do szyn zbiorczych. Układ podany na rys. 2.27 jest rozwiąz
IMG?35 (2) Układ z rys 3.20 jest równocześnie charakterystyczny pod tym względem. Ze układy P-P utyt
skanuj0099 2 104 Rozdział 7. Rys. 7.20. Model elastooptyczny osłony nośnej z przegubem Cardana układ
IMG 71 (4) 2. UKŁADY POLACZKA STACJI m i i Rys. 2.8. Schemat rozdzielnicy o podwójnym systemie szyn
DAMA W SWETRZE 7 8 07 (09) -22/24/26/29- wm -20/22/24/27- i / ^ 4— 38/40/42/44 —-^7.. = 55/5
59 (175) WARUNKI STAWIANE POŁĄCZENIOM SZKŁA Z METALEM 59 Z krzywych na rys. 3-7 widać wyraźnie zależ
CCF20080709�040 1 R 2 3 1 SO 59 4 5 50,61,6,7 578 9 56 10,11,12 13.15 54, 65, 14 16,17,55, ią 19 2
30 (358) JO PN-90/B-03200 c) W połączeniach zakładkowych (rys. 20) można stosować wyłącznie spo
TKKF RELAKS KALISZ 04:53:31 nz 04:54:20 nz 04:55:03 nz 04:55:59 TTT TRIADA
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 429 Rys. 10.7. Układy sterowania silników prądu
100B73 W maszyno^ 5. Połączenia elementów kompletne połączenie wielowypustowe Rys. 5 20. Przeds
więcej podobnych podstron