mech2 14
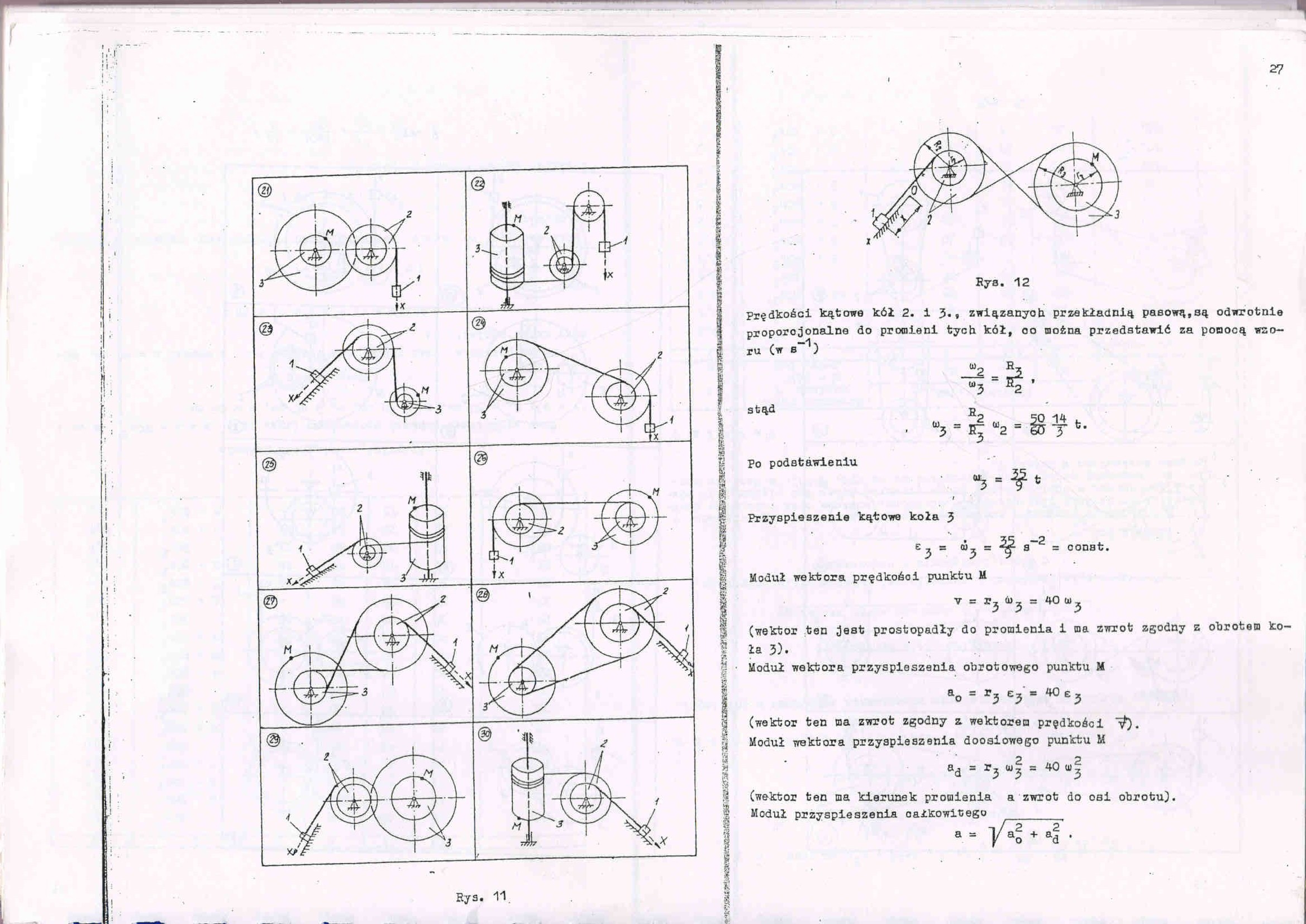
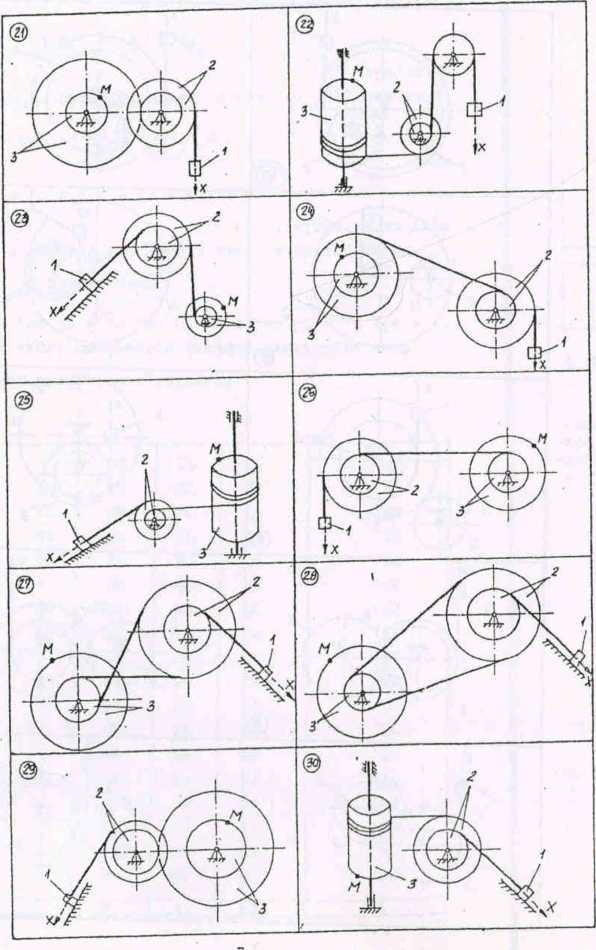
Rys. 11
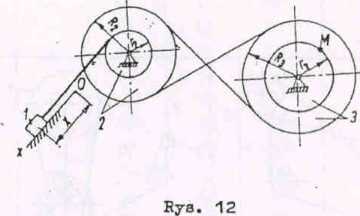
Prędkości kątowe kół 2. i 3., związanych przekładnią pasową,są odwrotnie proporojonalne do promieni tych kół, oo można przedstawić za pomocą wzo
ru (w b
u)_ R,
stąd
Po podstawieniu
2 _ "2. “3 ^2 ’
■ ^ =
Przyspieszenie kątowe koła 3
e ^ = “3 = ^ s~2 = oonat*
Moduł wektora prędkośoi punktu M
v = r,to, = 40<d,
3 3 3
(wektor ten jest prostopadły do promienia i ma zwrot zgodny z obrotem koła 3).
Moduł wektora przyspieszenia obrotowego punktu M
ao = r3 e3
40 e
$ (wektor ten ma zwrot zgodny z wektorem prędkości V). | Moduł wektora przyspieszenia doosiowego punktu M
'3 p p
a, = rz oj7 = 40 uif
a 3 3 3
2 2 ao + ad *
Wyszukiwarka
Podobne podstrony:
18301 s 174 Zadanie 7.20 1 Promienie Znaleźć prędkości kątowe kól zębatych w połoienhTj— rys- 7.28,
14 mp=0,052 rys. 11 5.3 Komentarz do przedstawionych rozwiązań Chociaż ciągi wiszące instrukcja G-4
skanuj0290 (3) a) 0) c) d) Rys. 11.17. Rodzaje kół walcowych z u
CCF20081203�025 a) b) c)d) Rys. 11.17. Rodzaje kól walcowych z uzębieniem skośnym: a) skośne
Scan10152 Rys. 11.2. Schemat smarowania natryskowego ciężkiej przekładni zębatej: 1 — zbiornik oleju
bezpieczniki Rys. 9.11. Widok wyłącznika instalacyjnego S 191 Wyłączniki instalacyjne są wykonywane
Rys. 3.11. Sposób sprawdzania czujnika prędkości kątowej. Diagnozowanie układów ABS, ASR i ESP można
skanuj0014 (193) +1i c2<*)cic*11) zazwyczaj używany zamiast 14
img039 (14) 114 - 114 - Zad.7.11. Korzystając z rys.Z.7.1 narysować (w przekroju) i zwymiarować sprę
skanuj0011 Rys. 8. 11. Sześciostopniowa skrzynka prędkości 3*2: a) schemat ki
skanuj0014 (193) +1i c2<*)cic*11) zazwyczaj używany zamiast 14
skanuj0372 Rys. 14.7. Przemieszczenia osi wałów: a) poprzeczne, b) wzdłużne, c) kątowe [3] W celu za
więcej podobnych podstron