mech2 166
339
.330
339
.330

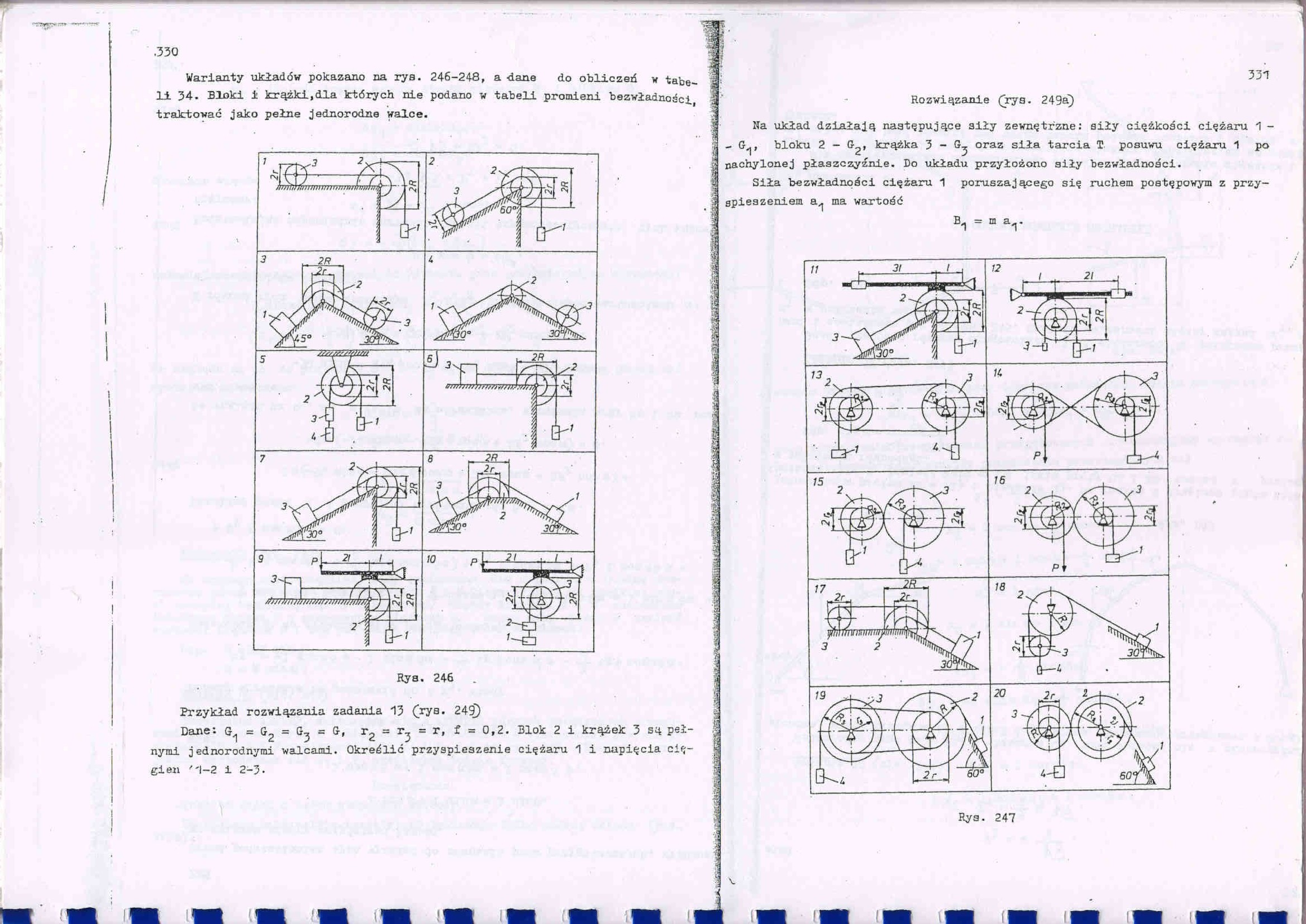
Warianty układów pokazano na rys. 246-248, a dane do obliczeó w tabeli 34. Bloki i krążki,dla których nie podano w tabeli promieni bezwładności traktować jako pełne jednorodne walce.
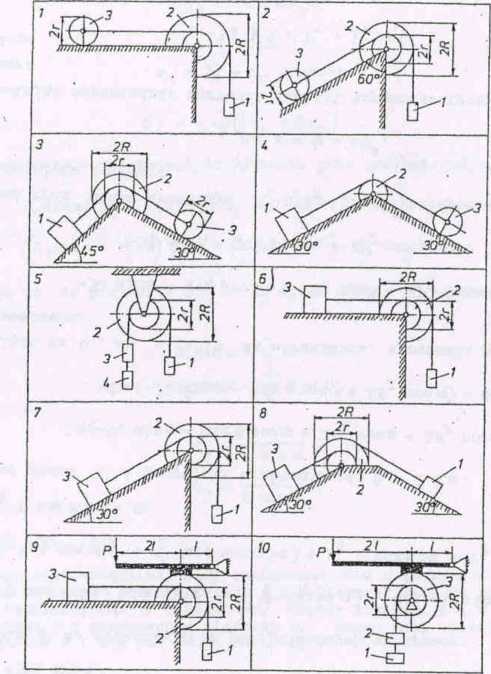
Rys. 246
Przykład rozwiązania zadania 13 (rys. 249)
Dane: = G, r? = r^ = r, f = 0,2. Blok 2 i krążek 3 są peł
nymi jednorodnymi walcami. Określić przyspieszenie ciężaru 1 i napięcia cięgien '1—2 i 2-3.
Rozwiązanie (rys. 249a)
Na układ działają następujące siły zewnętrzne: siły ciężkości ciężaru 1 -- G^, bloku 2 - G^f krążka 3 - G^ oraz siła tarcia T posuwu ciężaru 1 po nachylonej płaszczyźnie. Do układu przyłożono siły bezwładności.
Siła bezwładności ciężaru 1 poruszającego się ruchem postępowym z przyspieszeniem ma wartość
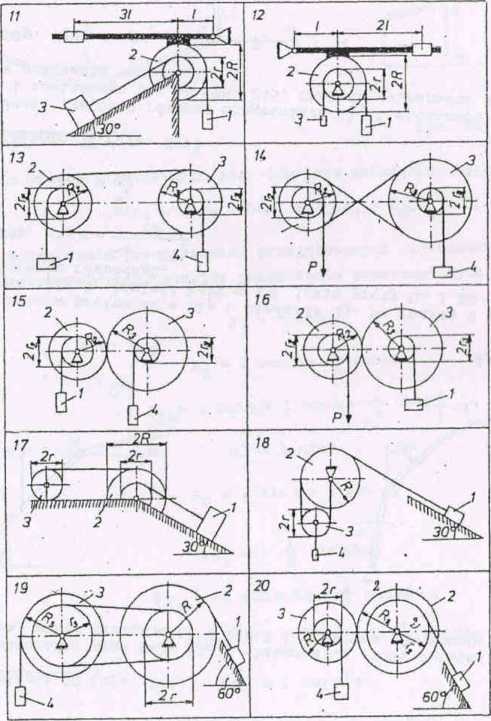
Rys. 247
;
Wyszukiwarka
Podobne podstrony:
80 (102) 30 a impulsu w jednym z trzech pierwszych układów (pokazanych na rys. 41) zależy od kąta mi
Badanie elementów układów automatycznego sterowania Rys. 7. Schemat układu pomiarowego do wyznaczani
szczegóły (w dwóch wariantach) oparcia słupów na fundamentach w miejscu dylatacji pokazano na rys.
291 [1024x768] 300 ROZTWORY I RÓWNOWAGI FAZOWF.Równowagi ciecz—paradla układów dwuskładnikowych Na r
Stateczność układów prętowych S9 pokazano na rys. 5.6. Wyznaczone wartości sił krytycznych oraz wyni
14 2 <- CO upel.agh.edu.pl/wimir/mod/quiz/attempt.php7q=37 Wskaż, który z układów pokazanych na r
mech2 173 345 Odp. 544 Zadanie 9 Układ, pokazany na rys. 257, znajdował 6ię w chwili początkowej w s
mech2 173 345 Odp. 544 Zadanie 9 Układ, pokazany na rys. 257, znajdował 6ię w chwili początkowej w s
2. Koncepcja budowy mostu Przyjęty wariant budowy przedstawiono na rys. 2.1. Zakłada on budowę mostu
img029 (32) Zadanie 6.4 Który z układów pokazanych na rysunkach 6.4a i 6.4b ma większy współczynnik
P1080210 3. Budowa robotów przemysłowych Możliwość wyboru z różnych układów napędowych pokazano na r
więcej podobnych podstron