mechanika128
rosi krętu układu punktów materialnych względem środka masy C jest równy pokrętowi momentu ogólnego układu sił czynnych względem tego punktu:
A£0(*) = Aq» A*o = K(y{tB) - K()[fA.>
- _ _ (3.68)
A*c(r) = Ac, A Kc = Kc(tB)-Kc{tA)
Twierdzenie 3.23 (zasada zachowania krętu układu punktów materialnych)
Jeśli w danym przedziale czasu moment ogólny układu sił czynnych względem nieruchomego punktu O jest równy zeru, to kręt układu punktów małe rialnych względem punktu O jest stały. Jeśli w danym przedziale czasu m<» ment ogólny układu sil czynnych względem środka masy C jest równy zeru, lo kręt układu punktów materialnych względem punktu C jest stały:
M0(t) b O => KQ{() « coitsl * KQ[tA) = *0(/B)
(3.69)
Afc(r) 5 O =* Kc(t) = const ■ Kc(tK) = Kc(tB)
Twierdzenie 3.24 (zasada równoważności pracy i energii mechanicznej)
W danym przedziale czasu praca sil czynnych działających na układ punktów materialnych jest równa przyrostowi energii mechanicznej tego układu:
L-AE. i-ZfF.&.-zfFń*
i-l i-i .
AE £(rB) - £(rA), £<i) £,(»)* £,(/)
£*('> ! E
L /-i
Twierdzenie 3.25 (zasada zachowania energii mechanicznej)
Energia mechaniczna układu zachowawczego, tj. układu, w którym nie wy%i.,i pują siły czynne, jest stała:
L = O => E(t) = const s £(rA) * £(fB) (3.71
3.1.4. CHARAKTERYSTYKI GEOMETRYCZNO-MASOWE CIĄG SZTYWNYCH
Rozpatrujemy ciało sztywne w przestrzeni, które traktujemy jako ciągł\ zbu punktów materialnych, a więc:
m.
=> dm, 52 => / (3/
i-i
256
Dynamika. Podstawy icotciyi
> ialo sztywne może być bryłą, powloką, tarczą lub linią (prętem):
- bryła (ciało trójwymiarowe)
dm * p dV (3.73)
f oznacza całkę potrójną po objętości,
- powłoka lub tarcza (ciało dwuwymiarowe)
dm • ndF (3.74)
J oznacza całkę podwójną po powierzchni,
- pręt (ciało jednowymiarowe)
dm - XdL (3.75)
j oznacza całkę pojedynczą po długości,
gdzie: dm - różniczka masy [kg|,
p - gęstość objętościowa masy [kg/m3],
V — objętość bryły (m3J. p - gęstość powierzchniowa masy [kg/m2],
F — powierzchnia powłoki lub tarczy [nr],
A — gęstość liniowa pręta [kg/m],
L - długość pręta [m].
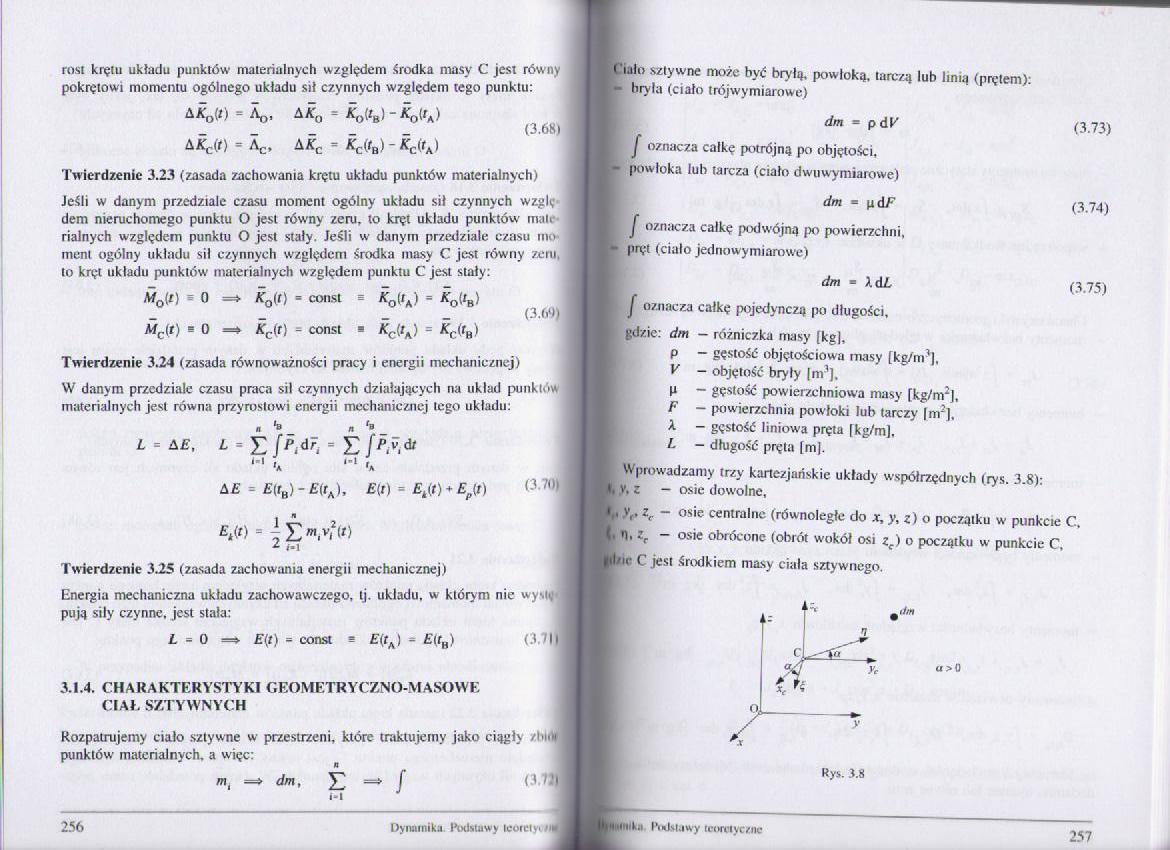
Wprowadzamy trzy kartczjańskie układy współrzędnych (rys. 3.8): v. z - osie dowolne,
■W
II,. >*,. Zc — osie centralne (równoległe do y, z) o początku w punkcie C.
I n. Zr - osie obróć wir C jest środkiem i

® ’ - AO“ obrócone (obrót wokół osi zc) o początku w punkcie C,

masy ciała sztywnego.

thn
a>0
iilkw Podstawy teoretyczne
257
Wyszukiwarka
Podobne podstrony:
Slajd27 2 Zasada krętu układu punktów materialnych 27
kolo0006 Moment bezwładności figury złożonej względem dowolnej osi jest równy sumie momentów bezwład
Kręt układu punktów materialnych Ruch układu o zmiennej masie Definicja i równania pracy mechaniczne
skrypt wzory i prawa z objasnieniami32 62Środek masy ■ Wzory określające położenie środka masy układ
Mechanika ogolna0022 44 kich punktów materialnych określonych względem bieguna O. Wielkość tę mo-
materialnych, pęd i energia układu punktów materialnych, zasada zachowania pędu i energii mechaniczn
mechanika148 3.2.3. DYNAMIKA UKŁADU PUNKTÓW MATERIALNYCH Zadanie 3.21 Dwa punkty materialne znajdują
Zadanie 3. Podaj zasadę krętu i zasadę zachowania krętu dla układu punktów materialnych. Wyjaśnij
IMAG0075 1 Uzupełnij wzór i opisz użyte symbole Kręt układu punktów materialnych m
Slajd41 Zasada równoważności energii kinetycznej i pracy dla układu punktów materialnych 41
Slajd7 3 Środek masy układu punktów materialnych gdzie m - masa całkowita układu:
= lim xdm 1 f , -= — J xdm 1dm M X źr.m. Środek masy układu punktów materialnych pomsza się w taki
Mechanika ogolna0025 50 z x układ punktów materialnych, np. żyroskop Rys. 232.7. Geometria mas2.7.1.
więcej podobnych podstron