mechanika45
Rozwiązanie
Przy ciężarze C^, s G ś Gnux układ pozostaje w równowadze statycznej.
a) G = Gmia
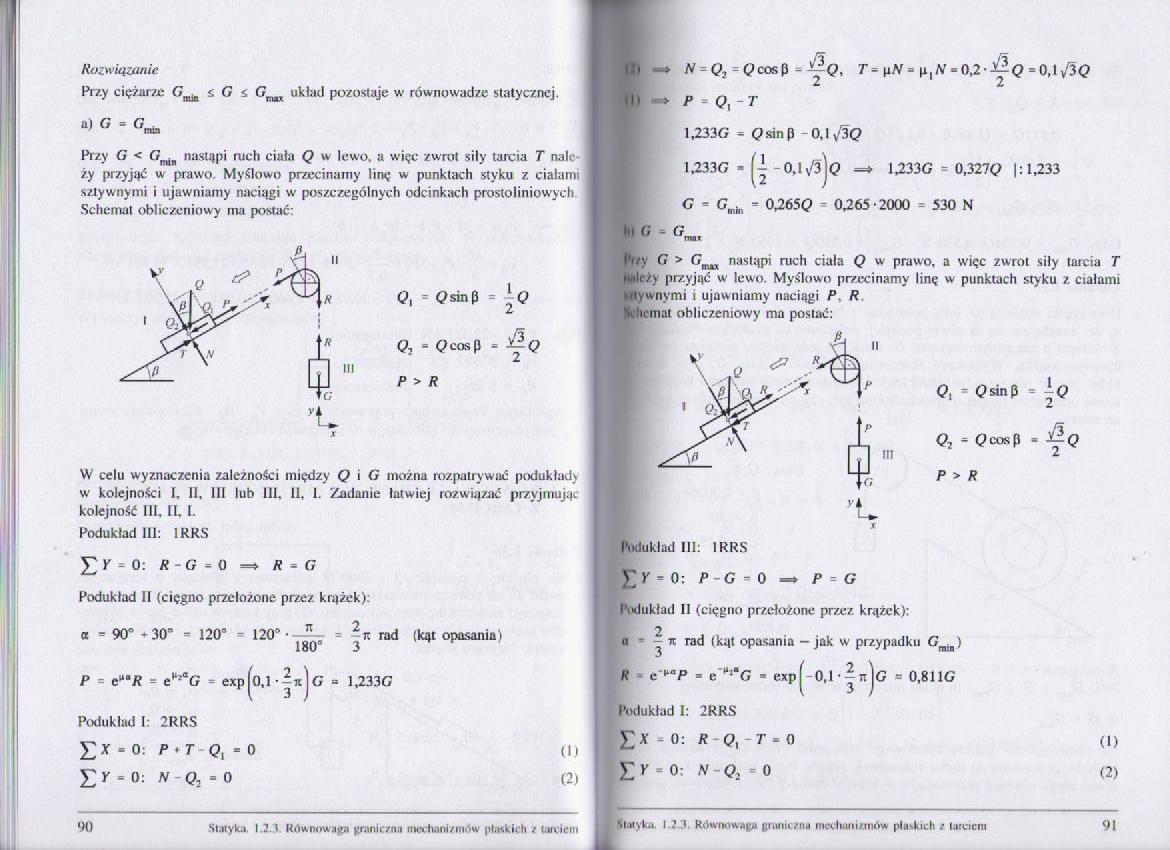
Przy G < Gmłn nastąpi ruch ciała Q w lewo, a więc zwrot siły tarcia T nale ży przyjąć w prawo. Myślowo przecinamy linę w punktach styku z ciałami sztywnymi i ujawniamy naciągi w poszczególnych odcinkach prostoliniowych Schemat obliczeniowy ma postać:
X
VL
W celu wyznaczenia zależności między Q i G można rozpatrywać podukłady w kolejności I. II. III lub III. U, I. Zadanie łatwiej rozwiązać przyjmując kolejność III. II. I.
Podukład III: 1RRS
£ Z = 0: R-G - 0 =» R = G
Podukład II (cięgno przełożone przez krążek):
a = 90" +30” = 120° = 120"* 71 = -it rad (kąt opasania i
180° 3

(!)
(2)
Podukład I: 2RRS £ * - 0: P + T <?, = 0 £ Y = 0: N Q7 = 0
‘>0
Statyka. 1.2. \ Równowaga granic/n.i mechanizmów płaskich / tarciem
0! n = Q7 = <?cosp ~^Q, T = \iN = p, N »0,2• Q = 0 J v/3G (|i «=> P = Q}-T
1,233G = tfsinP - OJ ^C?
1,2330 - - OJ v/3 (? =» U33G = 0.327G |: 1,233
G = Cmin = 0,265(? - 0,265 • 2000 = 530 N
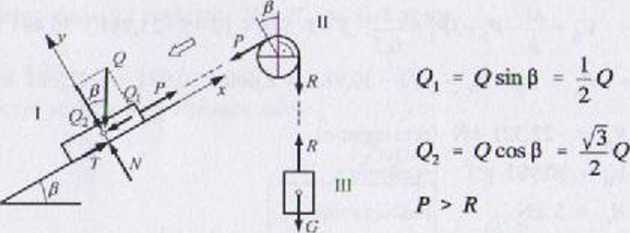
!''/'• G > G^ nastąpi ruch ciała Q w prawo, a więc zwrot siły tarcia T pilr/y przyjąć w lewo. Myślowi) przecinamy linę w punktach styku z ciałami tltywnyrai i ujawniamy naciągi Py R.
\ liemat obliczeniowy ma postać:
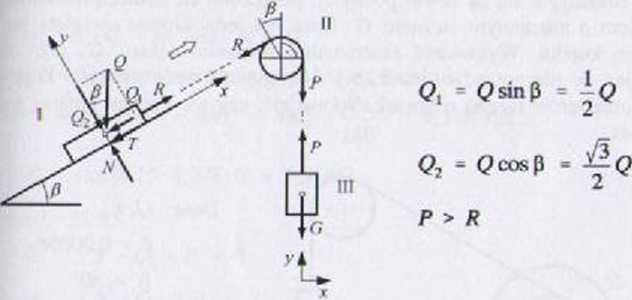
r.Kiukład III: 1RRS >;y/ = 0: /* - G = 0 —» P = G
Podukład II (cięgno przełożone przez krążek):
2
a - k rad (kąt opasania - jak w przypadku G^)
N e^P = t**G * exP[-0,l|n|G = 0.811G Podukład I: 2RRS
£< - 0: R Q, T = 0 (I)
£ V - 0: N -Q2 = 0 (2)
91
Si.iiyka. 1.2. i Równowaga gr.uik/nu mcchumzmów płaskich / lurdcm
Wyszukiwarka
Podobne podstrony:
mechanika28 Rozwiązanie Sprawdzenie GN, SW: Układ jest równoważny trzem tarczom połączonym przegubow
mechanika48 Rozwiązanie Układ jest w równowadze statycznej, jeśli G^ s G s G^ Po przekroczeniu górne
mechanika50 Rozwiązanie Układ jest w równowadze statycznej, jeśli G^ s G & GnłłX Po przekroczeni
mechanika56 Rozwiązanie Układ jest w równowadze statycznej, jeśli S k Saim. Po przekroczeniu równo*
skanowanie0003 13.04.2011Grupa A Zadanie feyC Wyznaczyć minimum masy “m2” ,przy której układ pozosta
DSC00043 3 13.04.2011Grupa AZadanie 1. Wyznaczyć minimum masy “m2” ,przy której układ pozostaje w ró
analityczne warunki równowagi - układ pozostaje w równowadze, gdy rzuty wypadkowej na osie x, y przy
img0001lgr
mechanika11 W praktyce stosujemy zapis symboliczny trzech równań równowagi statycznej (3RRS): E* o,
mechanika11 W praktyce stosujemy zapis symboliczny trzech równań równowagi statycznej (3RRS): E* o,
mechanika19 W praktyce stasujemy zapis symboliczny trzech równań równowagi statycznej (3RRS):£z-o, &
5a (42) 01. Zasady mechaniki (prawa Newtona). I prawo Newtona: Układ sił pozostają
cv Zasada oswobodzenia z więzów - jeżeli ciało pozostaje w równowadze przy działaniu więzów, to jego
Nie jest to układ równań bardzo łatwy do rozwiązania, wręcz przeciwnie. Jednak skrócony ale równoważ
DSC06408 R. Kotliński, E. ROhle dwóch warstw pozostających w równowadze stałej (zob. fot. 4.4). Ukła
więcej podobnych podstron